

I. 서 론
II. 시뮬레이터 소개
2.1 음파전달모델 BELLHOP
2.2 VirTEX 시뮬레이터
III. 해상실험 및 수치실험
3.1. 해상실험
3.2 수치실험
IV. 수중음향통신 시스템 성능 분석
4.1 채널응답특성
4.2 통신성능
V. 결 론
I. 서 론
수중음향통신은 해양환경의 반사, 굴절, 산란, 잡음 등 시・공간 변동성에 의해 신호가 변형되고, 다중경로 전달특성으로 인해 인접심볼간 간섭(ISI, Inter-Symbol Interference)을 유발하여 신호가 왜곡된다.[1] 왜곡된 신호를 복원하기 위하여 수중통신시스템에 위상추정(phase estimation)기법과 등화기(equalizer), 시역전(time reversal)처리기법 등을 적용하여 신호왜곡을 보상하는 연구가 이루어지고 있다.[2-4] 하지만 신호 보상에 관한 연구는 채널환경을 정확하게 측정하고 판단하는 과정이 선행되어야 하므로, 채널응답특성 및 채널 추정에 관한 연구도 활발히 진행되고 있다.[5,6]
수중통신을 목적으로 수행되는 해상실험은 많은 비용과 인력, 그리고 장비들이 요구되고 실험 당시의 해상 상태와 해양환경의 변동에 영향을 받게 된다. 이러한 이유로 일반적으로는 음향모델을 이용한 수치실험을 통해 많은 연구가 수행되고 있다. 수치실험은 환경적인 불확실성을 제한함으로써 해석적인 접근이 가능하지만, 해양환경에 대한 변수들을 고려하여 구현한 수치실험 데이터와 실제 해양환경에서 실험적 방법으로 획득한 실측데이터를 비교하여 수치실험의 성능을 검증한 연구 사례는 부족한 실정이다.
본 논문에서는 음선이론 기반의 BELLHOP 음향모델[7]을 이용한 가상의 신호 생성 시뮬레이터인 VirTEX(Virtual Time series EXperiment)[8-10]를 활용하여 수치모의실험을 수행하였다. VirTEX는 시간에 따라 변화하는 응답특성, 해수면의 유동 및 경계면의 음향특성에 따른 시간의 전개 형태 그리고 송・수신기 사이의 움직임을 고려하여 가상의 신호를 생성할 수 있다. 해상실험과 동일한 환경 하에 도출된 VirTEX 기반 수치모의 된 신호와 해상실험에서 획득한 신호의 채널응답특성 및 통신성능을 비교 분석하여, VirTEX 시뮬레이터를 활용한 수중음향통신 시스템의 성능을 검증하였다.
본 논문의 구성은 다음과 같다. 제 2장에서 시뮬레이터에 대해 설명하고, 제 3장에서 해상실험환경 및 음향모델을 이용한 간단한 수치실험을 수행한다. 제 4장에서 채널응답분석 및 통신성능 분석 결과를 정리하고, 마지막 5장에서 결론을 맺는다.
II. 시뮬레이터 소개
2.1 음파전달모델 BELLHOP
BELLHOP 모델은 해양도파관 환경에서 주어진 음속 필드를 고려한 2차원 음선 추적 모델로, 음선 추적의 원리는 음향의 압력필드를 예측하는 빔 추적을 기반으로 한다. 빔 추적 구조는 수중에서의 확산 법칙을 바탕으로 기하학과 물리학을 기반으로 한 Gaussian과 hat-shaped beam으로 구현된다. BELLHOP 모델은 거리-종속(range-dependent) 환경에서 경계면(해수면과 해저면)의 상태, 해역의 수심별 음속 구조 정보를 바탕으로 전달손실(transmission loss), 음선경로추적(ray tracing), 송・수신기 간의 고유음선경로추적(eigenray tracing), 음선의 도달 시간 및 진폭(arrival time and amplitude) 등 해양환경을 분석할 수 있다. BELLHOP 모델에 입력되는 정보는 음원의 방향성과 경계면 매질의 지음향 특성이 고려되어야 하므로, 해수면의 유동 및 파형의 정보와 해저면의 지음향 매개변수의 정보가 제공되어야 한다. 입력정보의 정확성과 신뢰성이 높을수록, BELLHOP 모델을 통한 출력정보는 실제 해양환경과 가깝게 시뮬레이션 할 수 있다.[7]
2.2 VirTEX 시뮬레이터
VirTEX는 음선이론을 기반으로 한 음파전달모델인 BELLHOP 모델을 이용하여 개발된 가상의 신호 생성 시뮬레이터로[8-10], 실제 해양환경 및 음향환경 정보를 BELLHOP 모델에 입력하여 음향환경에 대한 정보를 출력하고, 출력정보를 송신신호에 적용하여 가상의 수신신호를 생성한다. VirTEX 기반 수치모의 된 신호는 BELLHOP 모델의 입력정보, 즉 해양환경의 정적・동적인 특성이 고려되어 생성된다. 또한, VirTEX는 다중경로 전달특성에 의해 발생하는 시간 확산과 송・수신기의 움직임으로 발생하는 도플러 편이(Doppler Shift) 현상으로 인한 시변동성을 고려할 수 있기 때문에 해양환경에 대한 정보가 정확하고 상세함에 따라 VirTEX는 실제 해상에서 획득하는 수신신호와 유사한 가상의 수신신호를 생성할 수 있다.
그림 1은 가상의 수신신호가 생성되는 과정을 도식화한 것이다. 해양도파관 환경을 생성하는데 필요한 정보(그림 1의 BELLHOP INPUT)를 입력하여 시뮬레이션 하고자하는 출력정보(그림 1의 BELLHOP OUTPUT)를 도출한다. 출력정보는 입력정보의 OUTPUT OPTION에 따라 RAYFIL, SHDFIL, ARRFIL로 나뉜다. RAYFIL은 E(Eigenray tracing) 혹은 R(Ray tracing) 일 때 출력되는 음선경로추적에 관한 정보이며, SHDFIL은 C(Coherent acoustic pressure) 일 때 출력되는 전달손실(Transmission loss)에 관한 정보이다. ARRFIL은 A (Arrival time and amplitude) 일 때 출력되는 음선의 도달 시간과 진폭에 관한 정보를 나타낸다. “Time Variant Impulse Response” 과정에서 ARRFIL 출력정보를 송신신호에 적용시켜 가상의 수신신호를 생성하고, “Scattering Function” 과정에서 도플러를 보정하게 된다. 이 때 가상의 수신신호는 ARRFIL 출력정보와 송신신호의 컨볼루션(convolution) 정리를 통해 생성되며, 다음 식(1)과 같이 나타낼 수 있다.
|
그림 1.VirTEX 시뮬레이터 블록도 Fig. 1.Block diagram of VirTEX simulator. |
| (1) |
![]() 는 생성되는 가상의 수신신호,
는 생성되는 가상의 수신신호, ![]() 는 송신신호,
는 송신신호, ![]() 은 도달 정보(채널 임펄스 응답)의 수,
은 도달 정보(채널 임펄스 응답)의 수, ![]() ,
, ![]() 은 각각 ARRFIL 출력정보로 부터의 도달 진폭과 시간을 나타낸다. 하지만 식(1)은 직접파 이후 다중경로, 즉 경계면 반사파의 위상 변화를 고려할 수 없으므로 식(2)로 하여 사용한다.[10]
은 각각 ARRFIL 출력정보로 부터의 도달 진폭과 시간을 나타낸다. 하지만 식(1)은 직접파 이후 다중경로, 즉 경계면 반사파의 위상 변화를 고려할 수 없으므로 식(2)로 하여 사용한다.[10]
![]() 는
는 ![]() 의 Hilbert 변환을 의미한다. 출력정보의 도달 시간만큼 지연된 송신신호를 Hilbert 변환하여 경계면 반사파의 위상을 고려한 가상의 수신신호를 생성한다. 식(2)의 도달 시간 및 진폭을 정확하게 계산하기 위하여 그림 2를 토대로 일련의 과정을 수행한다. 먼저 도달 진폭은 유한요소법(finite element method)로부터 아이디어를 얻어 각 코너의 중심에 있는 형상함수(shape functions)를 구성하여 도달 진폭 값을 구하게 된다. 형상함수의 영향은 독립적이지만, 이들의 합은 이중선형보간법(bilinear inter-polation)과 대등한 결과를 제공하여, 반사와 굴절로 인한 오류를 보완할 수 있다. 각 코너에서의 형상함수는 그림 2에 의거하여 다음 식(3)과 같이 정의된다.
의 Hilbert 변환을 의미한다. 출력정보의 도달 시간만큼 지연된 송신신호를 Hilbert 변환하여 경계면 반사파의 위상을 고려한 가상의 수신신호를 생성한다. 식(2)의 도달 시간 및 진폭을 정확하게 계산하기 위하여 그림 2를 토대로 일련의 과정을 수행한다. 먼저 도달 진폭은 유한요소법(finite element method)로부터 아이디어를 얻어 각 코너의 중심에 있는 형상함수(shape functions)를 구성하여 도달 진폭 값을 구하게 된다. 형상함수의 영향은 독립적이지만, 이들의 합은 이중선형보간법(bilinear inter-polation)과 대등한 결과를 제공하여, 반사와 굴절로 인한 오류를 보완할 수 있다. 각 코너에서의 형상함수는 그림 2에 의거하여 다음 식(3)과 같이 정의된다.
|
그림 2.빔 추적을 위한 격자 구성 Fig. 2.Grid structure of beam tracing. |
| (2) |
| (3) |
여기서 ![]() 는 각 코너에서의 도달 진폭,
는 각 코너에서의 도달 진폭, ![]() 은
은 ![]() 방향에 비례하는 가중치,
방향에 비례하는 가중치, ![]() 는
는 ![]() 방향에 비례하는 가중치를 의미하며, 식(4)와 같이 표현할 수 있다.
방향에 비례하는 가중치를 의미하며, 식(4)와 같이 표현할 수 있다.
| (4) |
각 코너의 진폭은 독립적으로 유지되며, 진폭들에 해당하는 지연은 각 코너와 ![]() 사이 음선의 도달 시간에 의해 조정된다. 다음으로 도달 시간은 식(5)를 통해 구해지게 된다.
사이 음선의 도달 시간에 의해 조정된다. 다음으로 도달 시간은 식(5)를 통해 구해지게 된다.
| (5) |
여기서 ![]() 는 각각
는 각각 ![]() 에서
에서 ![]() 로의
로의 ![]() 방향의 거리차이,
방향의 거리차이, ![]() 방향의 거리차이를 의미하며,
방향의 거리차이를 의미하며, ![]() 는
는 ![]() 에 도달하는 빔의 각도,
에 도달하는 빔의 각도, ![]() 는 음속을 나타낸다.
는 음속을 나타낸다.
VirTEX 시뮬레이터는 이러한 일련의 과정을 거쳐 해양환경을 고려한 가상의 수신신호를 생성한다.
III. 해상실험 및 수치실험
3.1. 해상실험
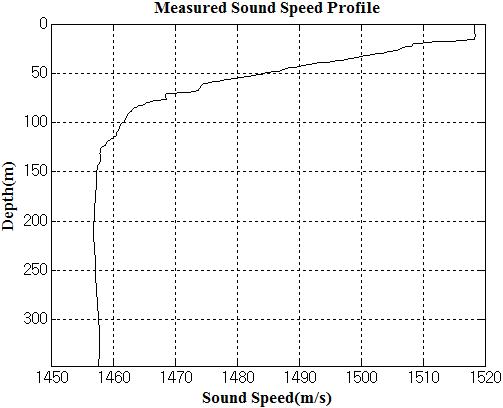
2010년 10월 동해시 인근 해역(그림 3)에서 채널응답특성 도출 및 데이터 변조 신호의 전송을 통한 통신 성능 분석을 목적으로 해상실험을 실시하였다. 실험에 사용된 음원의 중심주파수는 6 kHz이고, 대역폭은 4 ∼ 8 kHz이다. 송신기는 수심 60 m에 위치하며, 수평으로 무방향성(omni-directional), 수직으로 -40° ∼ 40°의 방향성을 가진다. 수신단은 수직선배열센서로 수심 92.5 m ∼ 107.5 m에 24개의 센서가 비 균등 간격으로 배치되며, 채널당 65536 Hz의 샘플링율을 갖는다. 음원과 수신단의 거리는 468 m이며, 그림 4는 해상실험 모식도이다. 음원과 수신단의 위치고정이 어려워 표류상태로 실험을 진행하였다. 실험해역의 음속 프로파일은 XBT(eXpendable Bathy Thermograph) 를 이용하여 측정하였으며, 그림 5와 같이 음원이 위치한 수심보다 낮은 수심에서 음속이 빠른 구조를 가지고 있어서 음선이 하향으로 회절하는 특징을 갖는다.[11]
|
그림 3.해상실험 지역 Fig. 3.Experiment site. |
|
그림 4.해상실험 모식도 Fig. 4.Experiment configuration. |
|
그림 5.실험해역 음속 프로파일 Fig. 5.Sound speed profile. |
3.2 수치실험
해상실험에서 획득한 정보를 BELLHOP INPUT으로 활용하여 수치실험을 수행하였다. 실험해역의 해수면 상태와 해저면 지형은 측정할 수 없었으므로, 해수면의 유동 및 그에 따른 파형은 고려하지 않았으며, 해저면의 지형 역시 평탄한 것으로 가정하였다. 해저면의 지음향 매개변수로, 구성성분은 실트질-점토, 음속 1540 m/s, 밀도 1.6 g/cm3, 감쇠값(attenuation) 0.4 dB/λ으로 설정하였다.[11] 그림 6은 BELLHOP 모델을 이용하여 고유음선경로를 도식화한 것이며, 그림 7은 그림 6의 고유음선경로를 도달 시간 및 진폭으로 나타낸 것이다. 고유음선경로는 직접파와 해수면 반사파 이렇게 두 종류의 음선만 확인할 수 있었다. 이러한 이유는 송신기의 수직 방향성이 -40°∼40° 이라는 점과, 송・수신기 사이의 거리(468 m)와 수심(300 ∼ 350 m)의 비율로 인한 것으로 확인하였다.
(a)
(b) |
그림 6.고유음선경로(a) Ch. 01 (b) Ch. 24 Fig. 6.Eigenray.(a) Ch. 01 (b) Ch. 24 |
(a)
(b) |
그림 7.도달 시간 및 진폭(a) Ch. 01 (b) Ch. 24 Fig. 7.Arrival time & amplitude.(a) Ch. 01 (b) Ch. 24 |
IV. 수중음향통신 시스템 성능 분석
4.1 채널응답특성
채널 임펄스 응답(CIR, Channel Impulse Response)은 송신신호가 수신기에 도달할 때까지의 정보를 나타내는 척도이다. 채널 임펄스 응답을 통해 송신된 신호가 수신되기까지의 환경정보 및 신호에 대한 채널의 반응・응답 정도를 알 수 있다. 시・공간적으로 변화하는 해상상태 및 해양환경은 수중음향통신 시스템에 큰 영향을 미치므로, 채널응답특성을 분석하는 것은 통신성능 분석에 앞서 중요한 과정이다. 따라서 해상실험 및 수치모의실험 수행 시 데이터 신호를 송신하기에 앞서 채널 분석용 송신신호인 탐침신호를 송신하여 해양환경 및 채널의 반응․응답 정도를 측정한다. 채널 임펄스 응답을 통하여 수심에 대한 시・공간적인 채널응답특성과 각 채널에서의 송신시간에 대한 도달 시간의 시변동성을 확인할 수 있다. 도출한 채널응답특성 결과는 데이터 신호의 채널 추정(channel estimation)에 활용되며, 채널 추정 정보는 통신신호의 보상 및 통신성능 추출에 활용된다. 채널 임펄스 응답의 기본적인 개념은 다음과 같은 식 (6)으로 나타낼 수 있다.
| (6) |
여기서 ![]() 는 컨볼루션 연산을 의미하며,
는 컨볼루션 연산을 의미하며, ![]() ,
, ![]() 는 각각 송신신호, 수신신호이며,
는 각각 송신신호, 수신신호이며, ![]() 는 수신단에서 더해지는 백색 가우시안 잡음이다.
는 수신단에서 더해지는 백색 가우시안 잡음이다. ![]() 가 구하고자 하는 채널 임펄스 응답을 의미한다.
가 구하고자 하는 채널 임펄스 응답을 의미한다. ![]() 는 다중경로의 수를 나타내고,
는 다중경로의 수를 나타내고, ![]() ,
, ![]() ,
, ![]() 는 각각
는 각각 ![]() 번째 경로의 이득값, 지연시간 도플러 위상 천이를 나타낸다.[12]
번째 경로의 이득값, 지연시간 도플러 위상 천이를 나타낸다.[12]
그림 8은 해상실험과 수치모의실험에서 사용된 탐침신호 패킷 구성을 나타낸 것이며, 그림 9는 이를 도식화한 것이다. 탐침신호는 전송 chip 수에 따라 M-sequence k4(15chips), M-sequence k9(511chips) 두 종류의 MLS(Maximum Length Sequence) 신호와 변조 범위 4 kHz에서 8 kHz를 가지는 LFM(Linear Frequency Modulation) 신호, 그리고 신호 사이의 가드타임(GT, Guard Time)으로 구성된다.
|
그림 8. 탐침신호 패킷 구성 Fig. 8. Probe signal packet structure. |
|
그림 9.탐침신호 패킷 구성 Fig. 9.Probe signal packet structure. |
본 절에서는 해상실험에서 획득한 신호와 해상실험 환경을 적용한 수치모의 된 탐침신호의 채널응답특성을 비교한다.
4.1.1 수신신호 분석
동해해상실험을 통해 수신단인 수직선배열센서에 수신된 신호는 그림 10과 같다. 획득한 신호를 확인한 결과 총 24개의 채널 중 1번과 22번 채널의 시스템 문제로 인하여 오작동 하였음을 확인하였고, 분석에서 제외하였다. 그림 11은 해상실험에서 환경 정보를 입력 정보로 한 수치모의 된 탐침신호이다.
|
그림 10.수신단에 수신된 탐침신호 Fig. 10.Received probe signal for ARRAY. |
|
그림 11.수치모의 된 탐침신호 Fig. 11.Simulation probe signal by VirTEX. |
4.1.2 채널응답특성 분석
그림 8, 9의 세 종류의 탐침신호 중 신호의 길이가 짧아 도플러 영향을 받지 않으며, 해상실험에서 획득한 신호 중 가장 상관관계(correlation)성능이 좋은 LFM 신호를 사용하여 채널응답특성을 도출하였다. 그림 12는 채널응답특성 분석 결과를 나타낸 것이며, (a)는 해상실험에서 수신된 LFM 신호의 채널응답특성이고, (b)는 VirTEX 기반 수치모의실험에서 생성된 LFM 신호의 채널응답특성이다. 두 결과, 다중경로 개수 및 깊이에 따른 시・공간적인 채널응답의 변화 경향이 전반적으로 유사함을 확인할 수 있다. 그러나 직접파 도달 이후의 해수면 반사파의 도달 응답은 차이점이 나타난다. 이러한 이유는 수치모의실험 수행 시 해수면의 유동 및 파형을 고려하지 않았기 때문이다. 이 점은 해수면의 유동 및 파형 정보를 측정하여 적용한다면 보완할 수 있을 것으로 판단된다.
(a)
(b) |
그림 12.LFM 신호의 채널응답특성(a) 해상실험 결과 (b) VirTEX 수치모의실험 결과 Fig. 12.Channel Impulse Response of LFM. (a) Experimental result (b) VirTEX simulation result |
통신성능은 채널 통과 후 수신된 신호의 bit 정보와 원래의 송신한 신호의 bit 정보의 오차율을 나타내는 BER(Bit Error Rate)을 산출하여 판단한다. 실제로 수중에서 수신된 신호는 해양환경의 잡음 및 다중경로의 영향으로 ISI 현상이 발생하게 되어 원래의 송신 신호의 데이터 정보와는 큰 차이가 있다. 따라서 보상을 통해 BER을 최소화하여 통신성능을 개선하는 과정이 필수적이다. 이러한 과정에서 위상추정기법과 등화기, 시역전처리기법 등을 적용하여 신호왜곡을 보상한다.[2-4]
본 절에서는 해상실험에서 획득한 데이터 신호와 수치모의 된 데이터 신호에 적응형 등화기법을 적용하여 신호를 보상하고 BER을 산출한다. 두 BER 결과를 비교하여 수중음향통신 시스템에서 VirTEX 시뮬레이터의 활용 가능성을 검증한다.
4.2.1 신호 보상 시스템 구조
본 논문에서 사용한 신호 보상 시스템의 구조는 그림 13과 같다. 수신된 데이터 신호는 반송파 제거 후 정합필터(matched filter)를 통과하여 기저대역신호로 출력된다. 출력 신호는 동기화기(synchronizer)에서 신호의 동기를 검출하고, 채널 추정기(channel estimator)에서 채널을 추정하여 채널을 통과하면서 왜곡된 신호를 보상한다.[12] 동기화 및 초기 채널 추정을 위해 데이터 신호의 프레임은 그림 14와 같이 구성된다. 두 과정은 프리앰블(preamble) 구간에서 이루어진다. 동기화가 이루어진 신호는 적응형 등화기(adaptive equalizer) 과정을 통해 보상된다. 채널 추정기는 적응형 등화기의 초기 탭 계수 산출을 위한 초기 채널 벡터(initial channel vector)를 추정하며, 초기 채널 벡터 추정에 필요한 등화기의 탭 수는 채널응답특성의 도달시간을 바탕으로 구해진다. 적응형 등화기는 구해진 초기 탭 계수를 시작으로 최소 평균 자승(LMS, Least Mean Square) 알고리듬을 이용하여 시간에 따라 변화하는 채널의 전달특성을 보상하기 위한 적응 등화기 계수를 도출하여 신호를 보상한다.[5,12-13]
|
그림 13.신호 보상 시스템 구조 Fig. 13.System structure of signal equalizer. |
|
그림 14.데이터 신호의 프레임 구성 Fig. 14.Data signal frame structure. |
4.2.2 통신성능 분석
해상실험 및 VirTEX 기반 수치모의실험에서 수신된 데이터 신호는 4.2.1의 과정을 거쳐 보상되고, BER을 산출한다. 전송한 데이터 신호는 6 kHz의 반송파에 4 kHz의 대역폭을 갖는 BPSK(Binary Phase Shift Keying) 변조신호이고 3.2 kbps의 데이터 전송률을 갖는다. 데이터 변조신호는 총 60 프레임으로 구성되며, 전송 프레임의 총 심볼 수는 1632개, 프리앰블은 16개의 심볼을 사용하였다. 본 논문에서는 두 프레임의 데이터 신호를 선택하여 분석을 수행한다.
그림15의 (a), (b)는 각각 해상실험에서 획득한 12번 채널의 데이터 신호와 수치모의 된 12번 채널의 데이터 신호를 나타낸 것이다.
(a)
(b) |
그림 15.두 프레임의 데이터 신호(No. 12 channel)(a) 해상실험 결과 (b) VirTEX 수치모의실험 결과 Fig. 15.Data signal of two frames (No. 12 channel). (a) Experimental result (b) VirTEX simulation result |
그림 16, 그림 17은 각각 해상실험에서 획득한 첫 번째 프레임 신호의 성상도와 수치모의실험에서 생성된 첫 번째 프레임 신호의 성상도를 나타낸 것이다. 그림 16, 17의 (a)와 (b)는 각각 등화기 입력 성상도(신호 보상 전), 등화기 출력 성상도(신호 보상 후)를 나타낸 것이다.
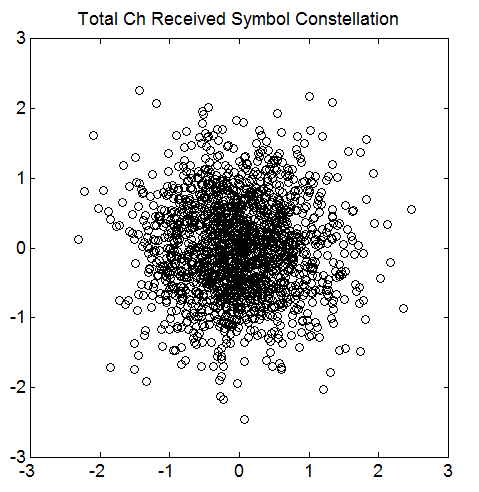
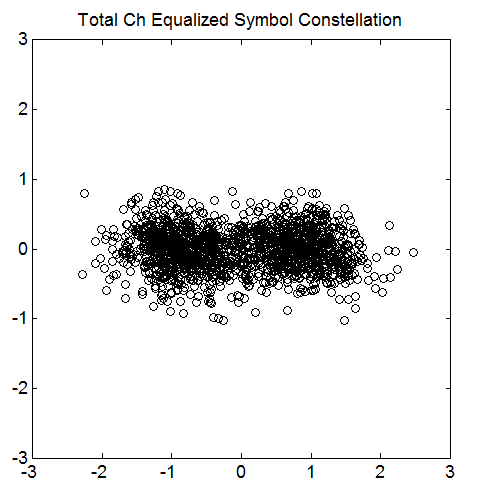
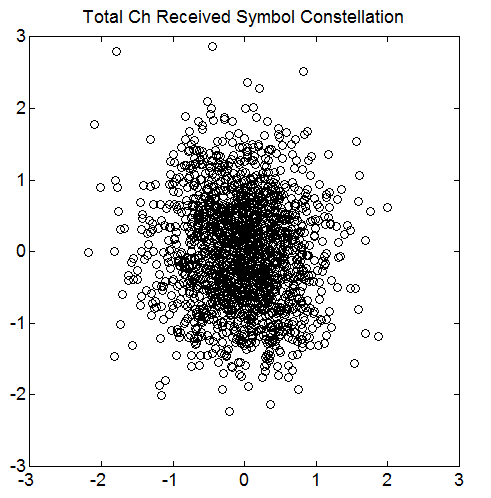
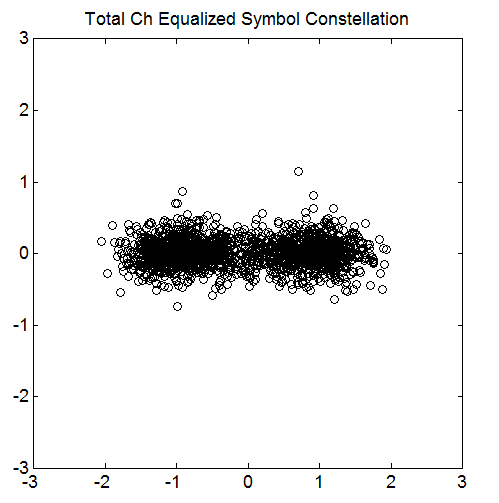
그림 18, 그림 19는 각각 해상실험에서 획득한 두 번째 프레임 신호의 성상도와 수치모의실험에서 생성된 두 번째 프레임 신호의 성상도를 나타낸 것이다. 그림 18, 19의 (a)와 (b)는 각각 등화기 입력 성상도(신호 보상 전), 등화기 출력 성상도(신호 보상 후)를 나타낸 것이다.
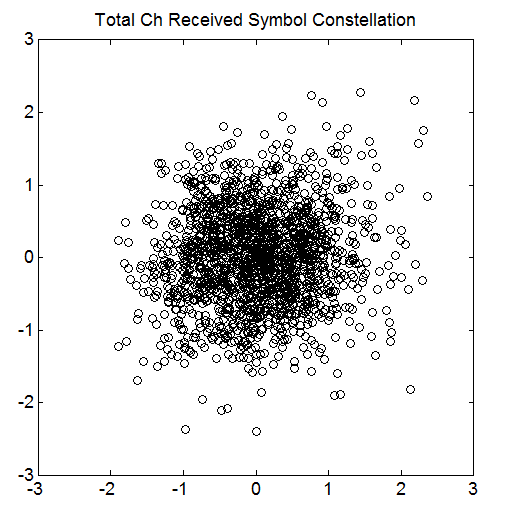
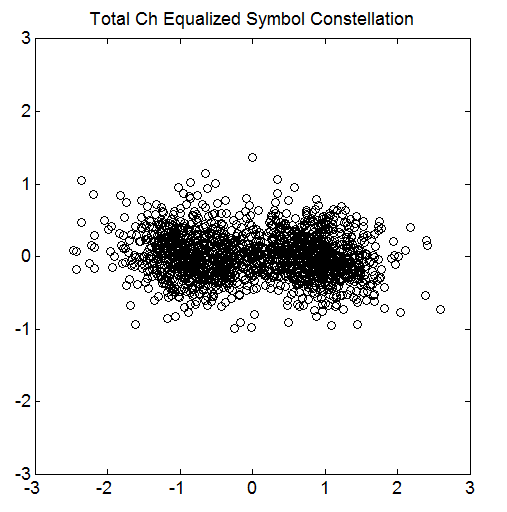
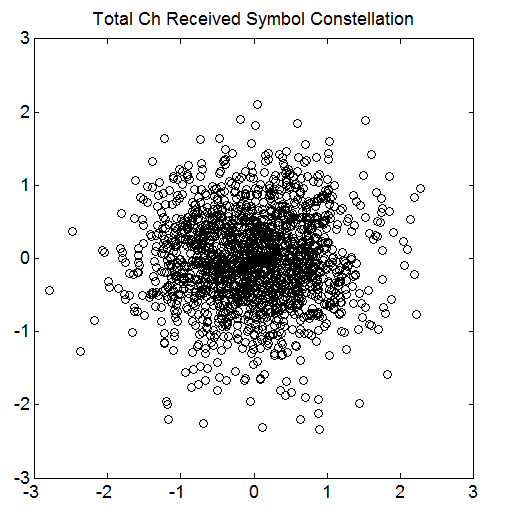
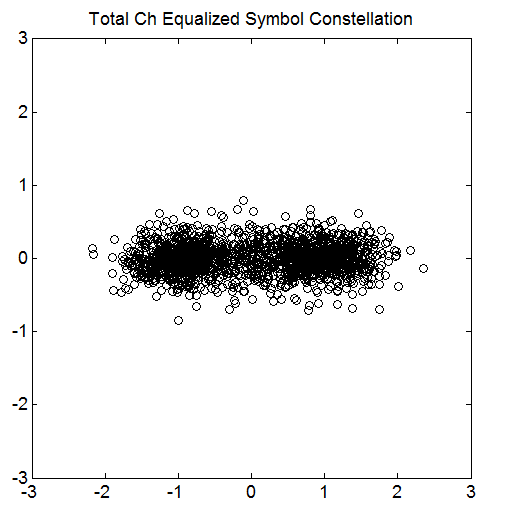
수치모의실험에서 생성된 신호는 실제 해양과 달리 잡음의 영향이 고려되지 않는다. 따라서 실제 해상실험에서 데이터 신호가 수신되지 않는 시간 구간에서 잡음전력과 데이터 신호의 신호전력 간의 신호대잡음비(SNR, Signal to Noise Ratio)를 산출하였다. 산출된 신호대잡음비는 약 9 dB였으며, 수치모의 된 신호에 백색 가우시안 잡음의 형태로 추가하였다.[12,14]
신호 보상 후 산출 된 첫 번째 프레임 신호의 BER은 해상실험에서 0.0797, 수치모의실험에서 0.0386이었다. 신호 보상 후 산출 된 두 번째 프레임 신호의 BER값은 해상실험에서 0.0821, 수치모의실험에서 0.0447이었다.
VirTEX를 활용한 통신성능 분석 결과, 해상실험과 수치모의실험에서 BER이 약 0.04 정도의 차이를 보였다. 그 이유는 수치모의실험에서의 경우 해수면의 영향이 고려되지 않았기 때문이다. 채널응답특성 결과와 같이, 통신성능 역시 해수면의 유동 및 파형의 차이로 수치모의실험에서의 BER 값이 해상실험과 비교하여 낮게 산출된다. 따라서 해수면의 유동 및 파형 측정에 관한 연구가 진행 중이며, 연구 결과를 VirTEX 시뮬레이터에 적용한다면 수치모의실험에서 BER 값이 증가하여 해상실험의 BER 값에 더욱 근접하게 될 것으로 판단된다.
V. 결 론
본 논문에서는 VirTEX 시뮬레이터를 활용하여 수중음향통신 시스템에서의 시뮬레이터 성능을 검증하였다. 시뮬레이터 성능 비교를 위해 해상실험을 실시하고, 획득한 실측데이터와 수치모의 된 데이터의 채널응답분석 및 통신성능 분석을 수행하였다. 채널응답분석 결과, 시・공간적인 채널응답특성이 전반적으로 유사한 경향을 나타냄을 확인하였다. 통신성능 분석 결과, 신호 보상 과정을 거친 후 산출된 첫 번째 프레임 신호의 BER은 해상실험에서 0.0797, 수치모의실험에서 0.0386, 두 번째 프레임 신호의 BER은 해상실험에서 0.0821, 수치모의실험에서 0.0447을 보였다. 수치모의실험에서 해수면의 영향이 고려되지 않았으므로 해상실험과 수치모의실험의 BER 결과가 차이가 나타나지만, 이를 감안할 때 비교적 유사한 통신성능을 도출하였다. 따라서 VirTEX 시뮬레이터가 해상실험 결과를 예측할 수 있는 유용한 도구가 될 수 있음을 확인하였으며, 해수면의 영향에 관한 연구가 진행되어 이를 적용한다면, VirTEX 시뮬레이터를 활용한 수중음향통신 시스템의 성능은 향상될 것으로 판단된다.
