

I. 서 론
II. Iterative Wiener Filter(IWF) 알고리즘[7]
III. 이중 슬라이딩 윈도우 IWF
IV. 성능 확인을 위한 모의실험
4.1 급격한 시스템 변화가 있는 시스템의 추정
4.2 점진적인 시스템 변화가 있는 시스템의 추정
V. 결 론
I. 서 론
적응 필터링 기법은 다양한 시스템 파라미터를 추정 분야에 널리 사용된다.[1,2,3,4,5] 유한 임펄스 응답(Finite Impulse Response, FIR) 적응 필터링에서는 필터 가중치가 원하는 응답과 적응 필터 출력 사이의 평균 제곱 오차(Mean Square Error, MSE)를 최소화하는 방식으로 반복적으로 갱신된다. 잘 알려진 최소 평균 제곱(Least Mean Square, LMS) 적응 알고리즘은 필터 가중치 갱신이 간단하고, 최적의 스텝 사이즈를 사용할 경우 수렴 속도도 비교적 빠르다.[1] 재귀 최소 제곱(Recursive Least Squares, RLS) 알고리즘[1]은 다양한 잡음 환경과 응용 분야(예: 입력 신호가 높은 상관성을 가지거나 자기상관 행렬의 고유값 분포가 큰 경우)에서 LMS 계열 알고리즘보다 우수한 성능을 제공한다. 그러나 RLS 알고리즘은 상대적으로 높은 계산 복잡도를 가진다. 또한 RLS 알고리즘은 자기상관 행렬의 역행렬 업데이트로 인해 수치적 불안정성 문제에 직면할 수 있다.[6]
Xi와 Liu는 Reference [7]에서는 위에서 언급한 RLS의 문제점을 극복하기 위해 Iterative Wiener Filter(IWF) 알고리즘을 제안하였다. IWF 알고리즘은 수렴 속도와 과잉 MSE 측면에서 RLS 알고리즘에 근접한 성능을 보이나, 역행렬을 사용하지 않는 적응 알고리즘이다.[7,8,9] 그러나 IWF를 시변 환경에서 사용할 때에 적합한 방법은 아직 제안되지 않았다. 이는 IWF 알고리즘이 사용하는 스텝 사이즈가 시변 환경에 따라 변화되기 때문에 시변 환경에도 어느 정도의 추적 성능을 내기 때문이라고 유추할 수 있다. 반면 RLS의 경우 망각인자를 환경에 맞게 조절할 수 있는 가변 망각인자 RLS 알고리즘(VFF-RLS)이 개발되었으며, 망각인자를 조절하여 알고리즘의 추적 성능과 정상 상태 성능을 개선하였다.[10,11,12,13] 또 길고 짧은 두 개의 유한 길이 데이터 윈도우를 시스템 환경에 따라 선택하도록 해서 시변 시스템 환경에서 추적 성능을 높인 이중 슬라이딩 윈도우 RLS가 제안되었다.[14]
본 논문에서는 IWF에 사용할 수 있는 이중 슬라이딩 윈도우 알고리즘을 제안한다. 그리고 이 이중 슬라이딩 윈도우 IWF 알고리즘을 시변 시스템 추정에 적용하여, 단일 길이 윈도우를 사용하는 IWF와 비교한다. 이를 통해서 제안한 이중 슬라이딩 윈도우 IWF 알고리즘이 변화가 많은 시스템을 추정할 때는 짧은 길이 단일 윈도우를 쓰는 IWF처럼 동작하고, 변화가 적은 시스템을 추정할 때는 긴 길이 단일 윈도우를 쓰는 IWF처럼 동작하여 제안한 이중 슬라이딩 윈도우 IWF가 시스템 변화에 맞춰 스스로 윈도우 길이를 바꾼다는 것을 보인다.
이 논문의 구성은 다음과 같다. 2장에서는 IWF 알고리즘을 소개하고, 3장에서는 이중 슬라이딩 윈도우 IWF 알고리즘을 제안한다. 4장에서는 시변 시스템 환경에서 제안한 알고리즘의 시스템 추적 성능을 모의 실험을 통해서 보인다. 마지막으로 5장에서 결론을 맺는다.
II. Iterative Wiener Filter(IWF) 알고리즘[7]
시스템 추정 문제에서, 시점 n에서 시스템 출력의 관측 신호 y(n)를 입력 신호 x(n) 시퀀스가 M 차원 유한 임펄스 응답 형태의 시스템 wo=[w1,⋯,wM]T를 통과한 결과라고 가정한다.
적응형 시스템 추정에서는, 동일한 차원의 신호 벡터 x(n)에 M 차원 시스템 를 적용하여 출력 를 추정하고, 오차 신호 를 계산한다. 여기서 는 시스템 출력의 참값, ŷ(n)는 추정된 출력, v(n)는 측정 잡음이다. 시스템을 추정하기 위해 Eq. (1)과 같이 비용 함수를 정의하고 이를 최소화한다.
여기서 . Eq. (1)을 최대 기울기법으로 최소화한다면, 추정 벡터 갱신식은 Eq. (2)와 같다.
여기서 는 스텝 사이즈이고, 이다. 그리고 는 Eq. (3)과 같다.
여기서 이고,
이다. 는 고정 망각 인자를 사용한 입력 신호 벡터의 자기 상관 행렬 갱신식이고, 은 고정 망각 인자를 사용한 입력 신호 벡터와 출력 신호의 상호 상관 벡터 갱신식이다. 그리고 스텝 사이즈는 Eq. (4)로부터 구할 수 있다.[7]
Eq. (4)에 Eq. (2)를 대입하면 Eq. (5)와 같이 된다.
Eq. (5)를 스텝 사이즈 에 대해서 다시 정리하여 Eq. (6)과 같은 스텝 사이즈 갱신식을 구한다.[7]
III. 이중 슬라이딩 윈도우 IWF
IWF 알고리즘 보면 알고리즘의 수렴 속도는 스텝사이즈를 비용 함수를 최소화하는 방향으로 계속 갱신하면서 얻는 것을 알 수 있다. RLS 알고리즘 중에는 데이터 윈도우 길이를 이용하여 수렴 속도에 대응하는 Sliding Window Recursive Least Square(SW- RLS)가 있다.[15] SW-RLS는 긴 길이 윈도우로써 정상 상태에서 정확도를 확보하고, 짧은 길이 윈도우로써 시변 추적 성능을 추구한다. 그러나 단일 윈도우를 사용하는 일반 SW-RLS로는 시변 추적성과 정상 상태 성능을 동시에 달성하기 어려웠다. Reference [14]에서 두 개 윈도우를 사용하는 SW-RLS를 제안하여 위와 같은 문제를 완화할 수 있음을 보였다. 본 논문에서 IWF를 두 개 윈도우를 사용하도록 수정하고, 그로부터 정상 상태 정확도와 시변 추적성을 동시에 확보할 수 있도록 한다.
IWF 알고리즘이 유한 길이 윈도우를 사용할 수 있도록 하게 위해서 Eq. (3)의 갱신식과 갱신식을 다음과 같이 수정한다.
여기서 Ls는 윈도우 길이이다. 그리고 윈도우 길이를 자동으로 조정하기 위한 척도로써 Reference [14]와 같은 척도를 사용한다. Reference [14]에서는 Park[10]이 제안한 가변 망각 계수 , (단 는 데이터 윈도우 내의 추정 오차 평균 에너지, , 는 최대 망각 계수, 𝛼는 스케일 상수),를 윈도우 길이 조절 척도로 사용했다. Fig. 1에 망각 계수를 이용하여 두 개의 데이터 윈도우를 운용하는 논리를 정리하였다.[14] 단 는 윈도우 길이 선택 척도로만 사용되고, Eq. (7)과 Eq. (8)에서 사용하는 망각인자 𝜆는 IWF 알고리즘 상의 본래 용도로 사용한다. Eqs. (7), (8) 및 Fig. 1을 적용한 이중 윈도우 IWF 알고리즘(DLSW-IWF, Dual Length Sliding Window–IWF)을 Table 1에 정리하였다.
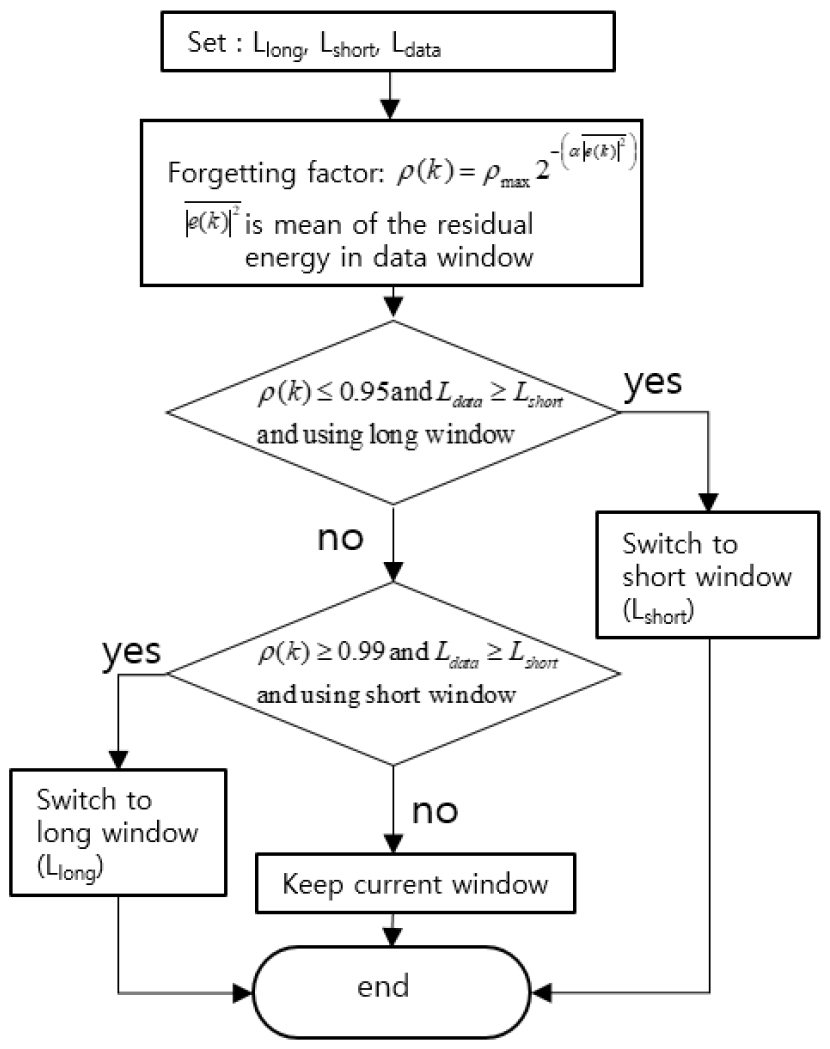
Table 1.
Dual Length Sliding Window-IWF (DLSW- IWF).
| Initialize |
|
Loop n =1, ... Select the length of window from the window selection logic in Fig. 1 as or . If Select to long window elseif Select to short window , , else Keep current window setting endif end |
IV. 성능 확인을 위한 모의실험
4.1 급격한 시스템 변화가 있는 시스템의 추정
본 실험에서는 Li et al.[12] 등이 제안한 가변 망각 계수 논문에서와 같은 가변 시스템 환경에서 여러 알고리즘의 성능을 서로 비교하였다.
급격한 시스템 변화를 위해서 임펄스 응답 w1 = [1.0, 0.5, 2.0, 0.3, 0.7]이 500번째 스텝에서, w2 = [–0.2, –0.5, –1.0, –0.4, –2.0]으로 갑자기 바뀌는 경우를 모사하였다. 이런 급격한 변화를 가진 시스템 환경에서 긴 길이 단일 윈도우 IWF와 짧은 길이 단일 윈도우 IWF와 제안한 알고리즘의 시스템 추정 성능을 비교하였다. 짧은 길이 단일 윈도우는 시스템 임펄스 응답 w1 또는 w2의 길이의 2배로 정해서 시변 환경에 잘 적응하도록 하고, 긴 길이 단일 윈도우는 200으로 정하여 최근 데이터뿐만 아니라 오래된 데이터도 사용하여 시스템을 추정하기 때문에 정적인 환경에 잘 적응하도록 하였다. 따라서 제안한 방법이 정적인 환경에서는 긴 길이 윈도우를 쓰는 IWF의 성능과 유사하고, 시변 환경에서는 짧은 길이 윈도우를 쓰는 IWF의 성능과 유사함을 보인다.
시스템 추적을 목적으로 하는 알고리즘들은 주로 비교적 높은 신호 대 잡음 비에서 사용된다. 따라서 본 논문에서는 각 알고리즘 간의 비교 실험을 높은 신호 대 잡음비인 20 dB와 중간 수준 신호 대 잡음비인 10 dB인 경우에서 각각 1000번씩 반복 실험하였다.
추정 성능을 수치화하기 위해서 시스템 추정 척도로 추정 시스템의 평균 표준 편차(Mean Standard Deviation, MSD)를 사용하였다.
여기서 wtrue는 시스템 파라미터 참값이고, westim은 추정한 시스템 파라미터이다.
Fig. 2에는 급변하는 시스템 환경에서 각 알고리즘이 추정한 시스템의 MSD를 도시한 것이다. 신호 대 잡음비 20 dB뿐만 아니라 신호 대 잡음비 10 dB에서도 제안한 DLSW-IWF는 변화가 적은 환경에선 긴 길이 단일 윈도우를 쓰는 IWF와 유사한 성능을 내고, 변화가 발생하면 짧은 길이 단일 윈도우를 쓰는 IWF와 유사한 성능을 내어서 변화에 빠르게 따라가는 것을 확인할 수 있다.

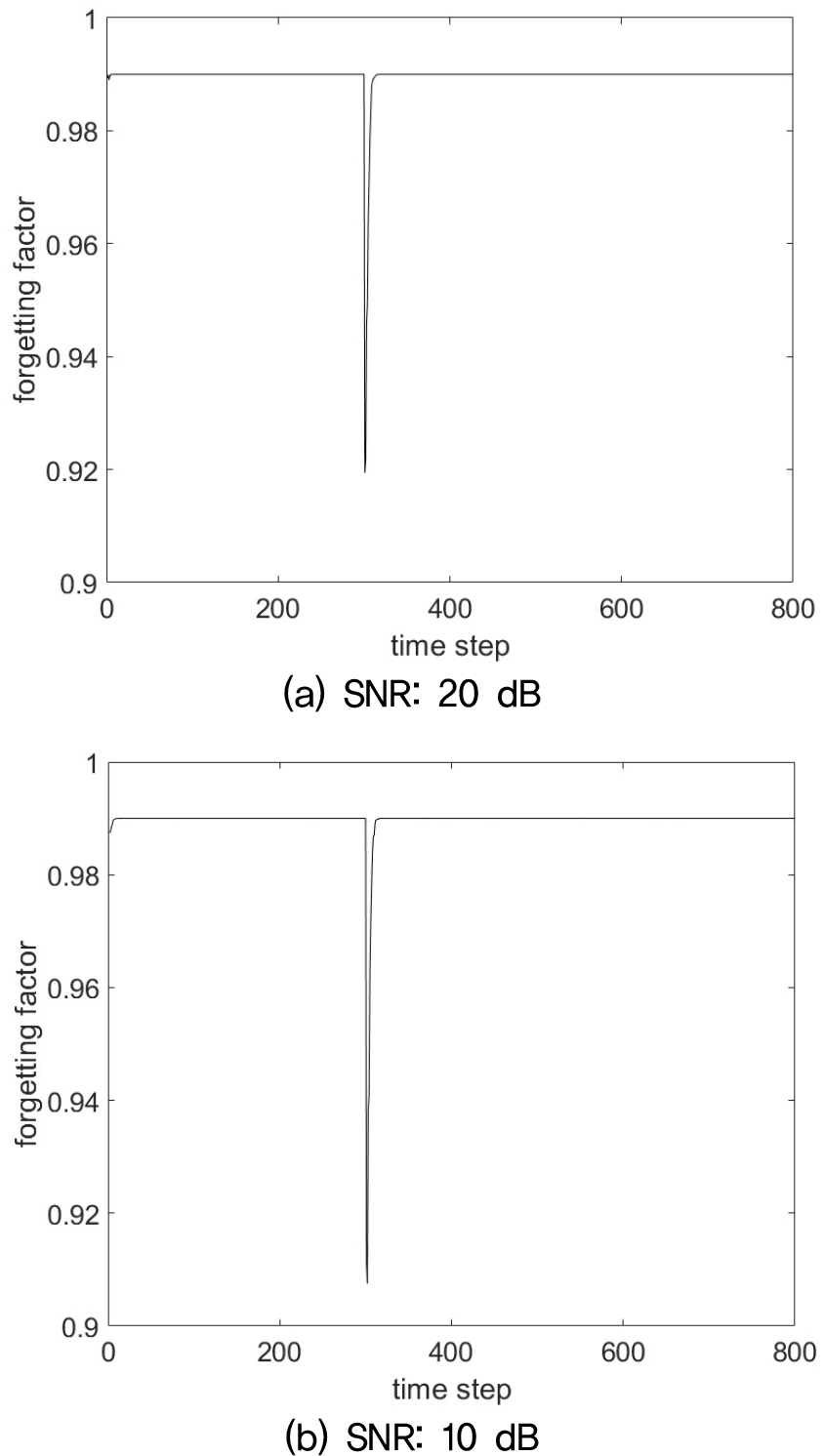
Fig. 3에는 DLSW-IWF 내부에서 윈도우 길이 선택을 돕는 망각 계수 의 변화 추이를 신호 대 잡음비 20 dB과 신호 대 잡음비 10 dB에서 각각 도시하였다. Fig. 3을 보면 앞에서 언급한 것같이 시스템이 변하는 시점인 500번째 샘플에서 망각 계수 가 매우 작아지는 것을 확인할 수 있고 또 시스템 변화가 적어지는 시점에서는 다시 값이 커지는 것을 확인할 수 있다. Figs. 2와 3을 통해서 변화 시점인 500번째 샘플을 기준으로 긴 윈도우에서 짧은 길이 윈도우로 바뀌고, 그 후에 Fig. 1의 윈도우 선택 논리에 의해서 다시 긴 윈도우로 바뀌었다는 것을 알 수 있다.
4.2 점진적인 시스템 변화가 있는 시스템의 추정
본 비교 실험에서는 시스템의 임펄스 응답이 3.1절에 사용한 w1에서 w2로 300 스텝에서 시작하여 500 스텝까지 각 파라미터가 시간에 선형으로 점진적으로 변하는 시변 시스템 환경을 만들고, 3.1절과 같이 긴 길이와 짧은 길이를 각각 사용하는 단일 윈도우 IWF와 제안한 알고리즘의 시스템 추정 성능을 서로 비교하였다. 나머지는 3.1절의 실험 조건과 같다.
Fig. 4에는 점진적으로 변하는 시스템 환경에서 각 알고리즘이 추정한 시스템의 MSD를 도시한 것이다. Fig. 4에 청색 수직선은 시스템 변화가 시작되고 끝나는 구간을 표시한다.
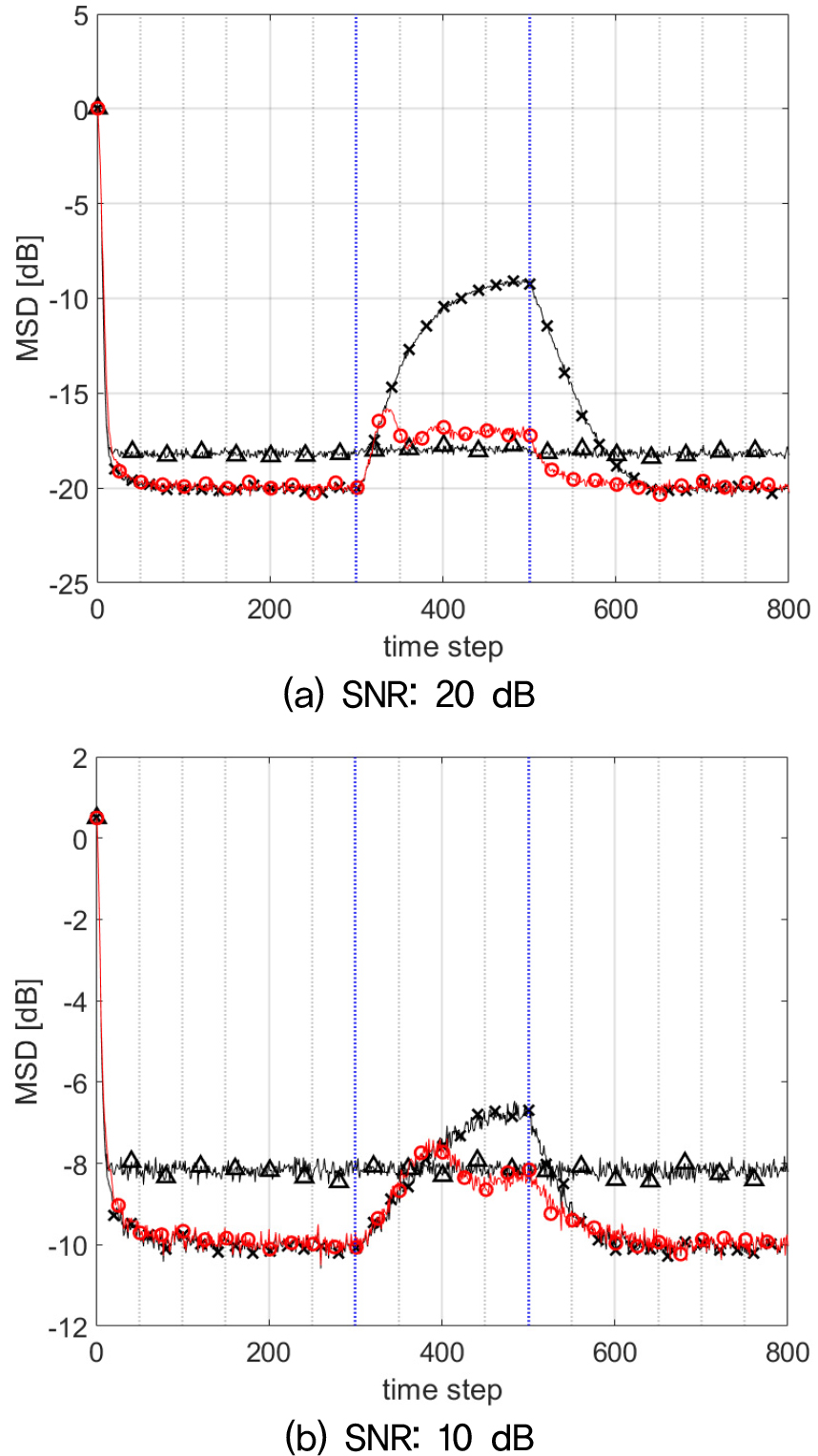
Fig. 4(a)은 신호 대 잡음 비 20 dB일 때 3가지 알고리즘의 시스템 추정 정확도를 비교한 결과이다. 결과를 보면 시스템이 시스템이 선형적으로 변동하는 구간에서, 긴 길이 단일 윈도우를 쓰는 IWF는 변화에 매우 느리게 적응하고 있다. 짧은 길이 단일 윈도우를 쓰는 IWF는 시스템이 변하는 구간에서 조금 변했다가 원상 복귀한 것을 관찰할 수 있다. 이는 윈도우 길이가 짧아서 변화에 빨리 적응하였음을 의미한다. 그러나 변화가 완료된 후 MSD는 셋 중 제일 나빴다. DLSW-IWF는 시스템 변화가 시작되면 MSD가 나빠지지만, 그 수준이 두 단일 윈도우 IWF의 중간 정도를 유지하고 변화가 끝나면 가장 빠르게 MSD가 개선되어 그 수준이 변화가 일어나기 이전의 수준으로 회복됨을 확인할 수 있다. 그림4(b)은 신호 대 잡음 비가 10 dB일 때 3가지 알고리즘의 시스템 추정 정확도를 비교한 결과이다. 이 경우도 신호 대 잡음 비 20 dB일 때 3가지 알고리즘의 시스템 추정 양상과 유사한 결과가 나왔다.
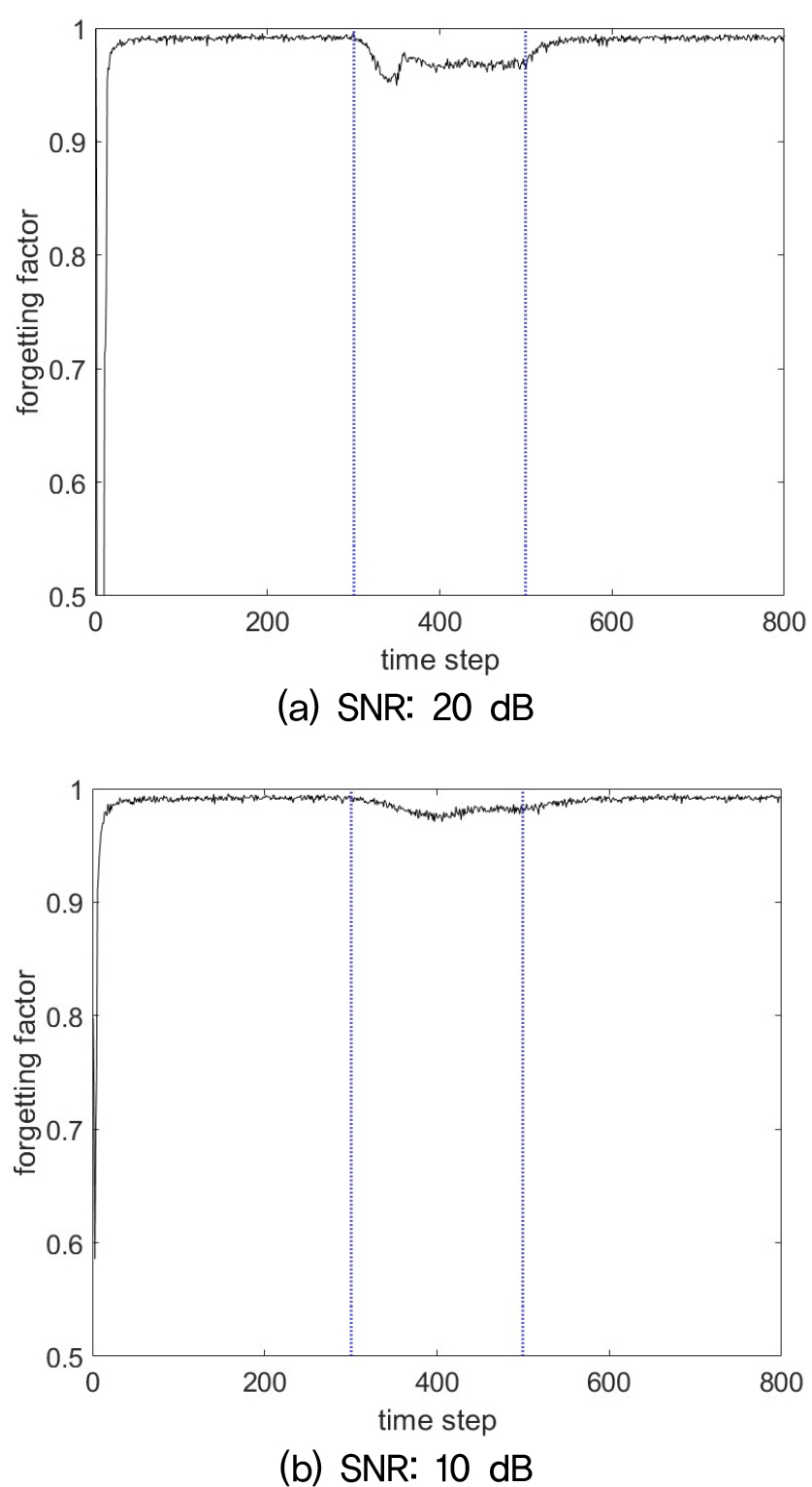
Fig. 5에는 신호 대 잡음비 20 dB과 신호 대 잡음비 10 dB에서 DLSW-IWF의 윈도우 선택을 위한 망각 계수 의 추이를 도시하고 있다. Fig. 5를 보면 앞에서 언급한 것같이 시스템이 변하는 시점인 300 샘플에서 망각 계수 값이 작아지기 시작해서 시스템이 변화가 끝나는 시점인 500 샘플에서 망각 계수 값이 다시 커지는 것을 확인할 수 있다. 그리고 신호대 잡음비가 상대적으로 낮은 10 dB에서는 망각 계수 변화 민감도가 저하되는 것도 함께 확인할 수 있다.
V. 결 론
본 논문에서는 RLS와 유사한 수렴 성능을 나타내지만, 역행렬을 쓰지 않아서 수치적으로 안정성을 보이는 적응 알고리즘인 IWF 알고리즘에 적용 가능한 이중 윈도우 알고리즘을 제안하였다. 이중 윈도우를 IWF에 적용함으로써 시스템 변화에 따라서 추정에 사용할 데이터 길이를 조절하게 되어서, 정적 시스템 추정뿐만 아니라, 시변 시스템 추정에도 추정 성능을 보장하게 되어, 다양한 경우에 IWF 알고리즘을 적용할 수 있게 되었다.
향후 연구에서는 시변 환경에서 더 향상된 추정 결과를 얻기 위해서 본 논문과 같이 긴 윈도우와 짧은 윈도우, 두 개 윈도우만으로 충분한지 또는 다른 길이의 윈도우가 추가로 요구되는지 등의 후속 연구가 필요하다.
