

I. 서 론
II. 백색화(prewhitening)를 적용한 RTLS 제안
2.1 Recursive Total Least Squares(RTLS)[2]
2.2 백색화(prewhitening)를 적용한 RTLS
III. 시뮬레이션을 통한 성능 검증
3.1 채널 추정을 통한 RTLS의 성능 비교
3.2 알고리즘의 견실성 실험
IV. 결 론
I. 서 론
부가 잡음에 오염된 데이터로부터 시스템 추정을 할 때 출력뿐만 아니라 입력에도 잡음이 존재하는 경우가 있다. 전통적으로 많이 쓰이는 시스템 추정 방법인 최소 자승 알고리즘(Least Squares, LS)은 출력만 잡음에 오염된 경우에 최적의 추정 결과를 내는 것으로 알려져 있다. 입력과 출력이 모두 잡음에 오염된 경우에는 완전 최소 자승법(Total Least Squares, TLS)이 더 좋은 추정 결과를 낸다고 알려져 있다.[1,2,3,4] 특히 최근 본격적인 도입이 되는 공중파 또는 수중 무선 센서 네트웍 분야에서 복잡한 실제 환경에 적용할 때, 샘플링 오류, 인적 오류 및 계측 오류에 따른 입력과 출력단에 오염 때문에 완전 최소 자승법 기반의 추정기가 주목받고 있다.[3,4]
완전 최소 자숭법으로 추정하는 알고리즘에는 여러 가지가 있지만 그 중에 Choi에 의해서 제안된 알고리즘[2]은 Recursive Least Squares(RLS)와 유사한 방법으로 계산하는 Recursive Total Least Squares(RTLS)로 알려져 있고, 이 알고리즘은 다른 연구에도 인용 발전되었다.[5] Choi et al.[2]가 제안한 방법은 전통적인 RLS와 같은 역행렬의 재귀적 갱신법을 이용해서 실시간 추정에 잘 맞는 방법이지만 알고리즘 중에 자기상관 행렬의 역행렬을 계산하는 과정에 수치적인 불안정성이 상존한다. 이런 수치상 불안정의 주된 원인 중 하나는 자기상관 행렬의 역행렬에 대칭성이 유지되지 못할 때라는 것이 알려져 있다.[6]이같이 RLS 알고리즘 상의 역행렬에 내재된 수치적 불안정성을 완화하기 위해서 Douglas는 백색화 기법을 적용하여 수치계산에서 오는 불안정성을 완화한 RLS방법을 제안하였다.[7,8]
본 논문은 구조적으로 RLS와 유사하기 때문에 역행렬 계산에 수치적 불안정성의 소지가 많은 기존 RTLS 알고리즘[2]의 견실성 향상을 위해서 Douglas[7]의 백색화 기법을 적용한 새로운 알고리즘을 제안한다.
본 논문은 II장에 기존의 RTLS를 정리하고, 백색화를 적용한 새로운 알고리즘을 제안한다. III장에는 견실성을 보이기 위해서 신호를 여러 가지 양자화 단계로 양자화하여 수치적 불안정성을 유도한 후 기존 알고리즘과 새로운 알고리즘 간의 추정 성능을 서로 비교한다.
II. 백색화(prewhitening)를 적용한 RTLS 제안
2.1 Recursive Total Least Squares(RTLS)[2]
어떤 추정 대상 시스템에서 입력과 출력 모두에 잡음이 섞인다고 가정할 때, Fig. 1과 같이 생각할 수 있다. 그리고 Fig. 1의 미지 시스템의 출력은 Eq. (1)과 같이 기술된다.
여기서 는 미지 시스템의 임펄스 응답이고, no(k)는 출력 잡음이고 이것은 평균이 0이고, 의 분산을 갖는 정규분포를 따른다. 또 이다. 그러나 미지 시스템을 추정하기 위한 적응 시스템의 입력에는 잡음이 부가되어서 다음과 같이 쓸 수 있다.
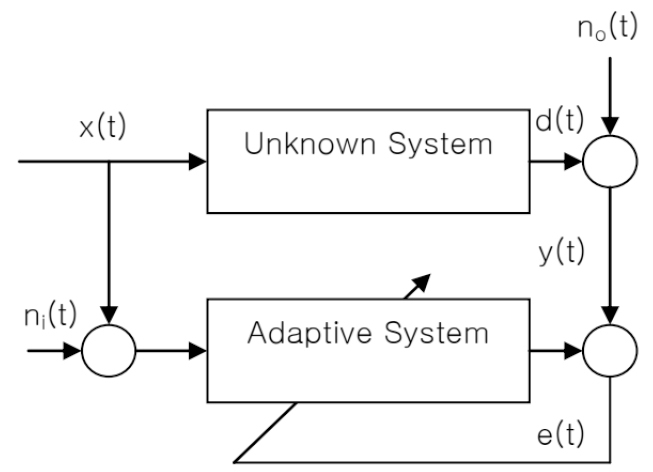
여기서 ni(k)는 정규 분포를 따르고 평균은 0이고, 분산은 이다. 위와 같은 잡음이 섞인 입력과 출력을 바탕으로 미지의 시스템을 추정할 경우에 다음 식과 같은 완전 최소 자승법이 최적의 해를 제공한다.[1,2]
여기서, 이고, 이다. 위를 풀기 위해서 Choi가 제안한 재귀형 완전 최소 자승법을 Table 1에 나타내었다.[2]
2.2 백색화(prewhitening)를 적용한 RTLS
Table 1에서 P(k)는 의 역행렬이다. 서론에 언급한 것처럼 RTLS 알고리즘의 수치적 불안정성은 재귀적으로 P(k)를 계산하는 과정에서 나온다.[6] 제안한 알고리즘에서는 P(k) 계산의 견실성을 더하기 위해서 Douglas가 제안한 백색화 기법을 사용하여 RTLS 알고리즘을 제안한다.[7]
Douglas가 사용한 알고리즘 유도 과정을 따라서 을 QT(k)Q(k)로 대치하면, Table 1의 k(k)는 다음과 같이 된다.[7]
위 Eq. (4)를 Table 1의 P(k)에 대입하면 P(k)는 다음과 같이 된다.[7]
여기서 이다. 그리고 벡터 v(k)는 가 Wide Sense Satationary(WSS)이라면 다음과 같은 특성을 갖는다.[7]
이는 Q(k)가 갱신되면 벡터 v(k)의 각 요소들 간의 상관성이 없어지고, 각각의 파워는 (1-λ)에 수렴한다는 뜻으로 해석할 수 있다.[7] 이는 벡터 v(k)가 백색화 되었다고 할 수 있다. Eq. (5)의 우변의 대괄호 부분은 다음과 같이 두 행렬의 곱으로 분해할 수 있다.[7]
Douglas가의 유도에 따라서 Eq. (7)의 우변은 다음과 같이 변형할 수 있다.[7]
그리고 Eq. (8)에서 는 v(n) 공간으로의 투영이 된다. 이는 신호 공간으로 투영되는 것을 의미한다. 반면에 는 신호공간과 직교인 잡음 공간으로 투영을 의미한다. 이와 아울러서 는 의 고유치 하나를 갖고, 나머지는 잡음공간으로 고유치가 1임을 보여주고 있다. 과 의 대칭성과 직교성을 이용하면, BT(k)B(k)의 대칭 평방근 행렬은
이 된다.[7] Eq. (7)를 이용하면 Eq. (5)에서 Q(k)은 다음과 같이 갱신될 수 있다.[7]
Eq. (10)에 Eq. (9)를 대입하여 Q(k)의 갱신식을 얻는다.[7]
여기서 이고 이다. 위에 기술한 결과를 정리하여 새로운 RTLS 알고리즘을 Table 2에 정리하였다.
Table 2.
Prewhitened RTLS.
|
Parameter initialization step: Initialize the parameter (Q(0)in random number with N(0,1)1) distribution, 𝜆) |
|
Parameter estimation step: |
알고리즘의 복잡도를 비교하기 위해 계산 복잡도에 제일 큰 영향을 미치는 곱셈의 수를 위주로 비교하면, Table 1 알고리즘은 1회 반복마다 4(N + 1)2 + 2(N + 1) + 1의 곱셈이 필요하고 Table 2 알고리즘은 1회 반복마다 5(N + 1)2 + (N + 1)의 곱셈이 필요하다. 따라서 제안한 견실화된 알고리즘은 기존 알고리즘에 비해서 약 25 % 늘어난 복잡도를 갖는다고 할 수 있다. 이렇게 늘어난 복잡도의 영향은 제안된 알고리즘의 견실화가 가져오는 이득들을 고려하여 유불리를 결정할 수 있을 것이다. 즉 견실화가 가져오는 잡음에 대한 견실성 이득뿐 아니라, 요구하는 프로세서의 비트수 저감에서 오는 하드웨어의 단순화에서 오는 이득 등도 고려할 수 있다. 예로써 공중파 또는 수중 무선 센서 네트웍 분야에 적용할 경우에는 프로세서의 비트수 저감이 처리하는 워드 크기를 결정하게 되어 센서 노드 간 통신량을 줄이는 효과도 생길 수 있고, 각 센서 노드 구성의 단순화에서 오는 다른 경제적 이득도 생길 수 있다.
III. 시뮬레이션을 통한 성능 검증
3.1 채널 추정을 통한 RTLS의 성능 비교
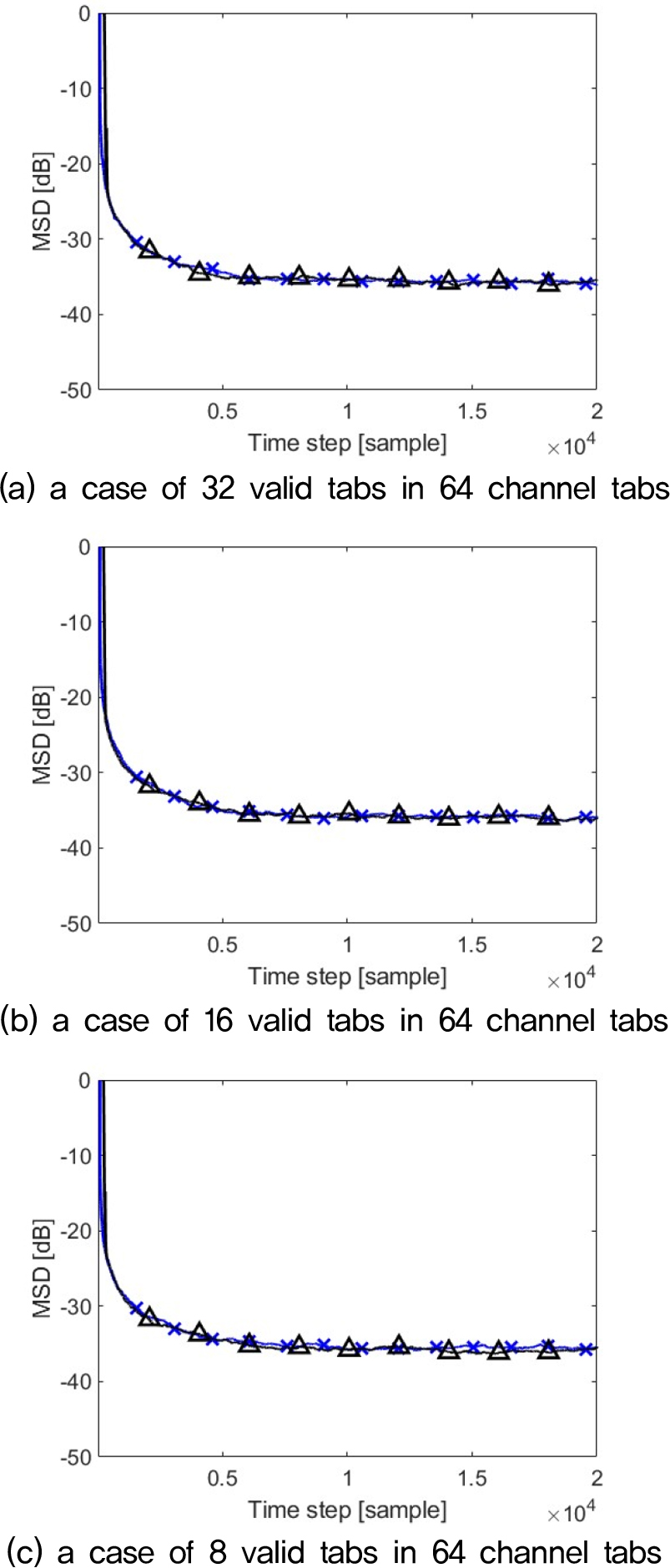
본 실험에서는 희소성 채널부터 비희소성 채널까지 다양한 형태의 채널을 사용하여 채널 추정 실험을 하였다. 사용 채널의 형태는 64개의 임펄스 응답 계수 중 불규칙하게 32개(비희소성 채널), 16개(중간 정도 희소성 채널), 8개(희소성 채널)의 영이 아닌 계수를 갖는 임펄스 응답 채널을 만들고, 각 채널에 대해서 100회씩 반복 추정 실험을 하였다. 입력 신호는 분산이 1인 정규 분포의 불규칙 신호를 생성하여 사용하였다. 또 신호대 잡음비가 20 dB가 되는 정규 분포 불규칙 잡음을 입력단과 출력단에 각각 부가하였다. 그리고 망각 계수는 0.99로 설정하였다.
본 논문에서 제안한 백색화 RTLS와 Table 1에 서술한 기존 RTLS와의 추정 성능을 비교하여 Fig. 2에 나타내었다. 추정 성능의 척도는 평균 표준 편차(Mean Standard Deviation, MSD)를 사용하였다.
Fig. 2는 제안된 백색화 RTLS의 알고리즘의 추정 성능이 기존 RTLS의 성능에 필적함을 확인할 수 있다.
3.2 알고리즘의 견실성 실험
본 실험에서는 제안한 백색화 RTLS 알고리즘이 기존 RTLS에 대해 수치 해석적으로 더 견실함을 보인다. 견실성을 비교하기 위해서 알고리즘 중에 양자화를 적용하여 양자화 잡음 오류를 만들고, 자기 상관 행렬의 역행렬 연산 중에 그 오류가 포함되도록 환경을 만들었다.
본 실험에서 양자화 비트 수를 24 비트, 22 비트와 18 비트로 변경하여 채널 추정 성능을 비교했다. 본 실험에서는 64개 탭 중 영이 아닌 계수의 숫자는 32개인 채널을 사용하였다. Fig. 3은 제안한 알고리즘과 기존 RTLS의 성능을 서로 다른 양자화 비트 수를 갖는 경우에 MSD를 비교한 결과를 보였다. Fig. 3의 결과를 보면, 유한 비트를 사용하여 양자화 잡음이 도입된 환경에서 Table 1의 기존 RTLS는 22비트부터 양자화 잡음에 의한 추정 결과의 발산을 볼 수 있다. 이에 반하여 제안된 알고리즘은 18 비트부터 발산함을 관찰할 수 있다. 본 실험을 통하여 제안한 알고리즘이 기존 RTLS보다 수치적 연산에서 더 견실함을 확인하였다.
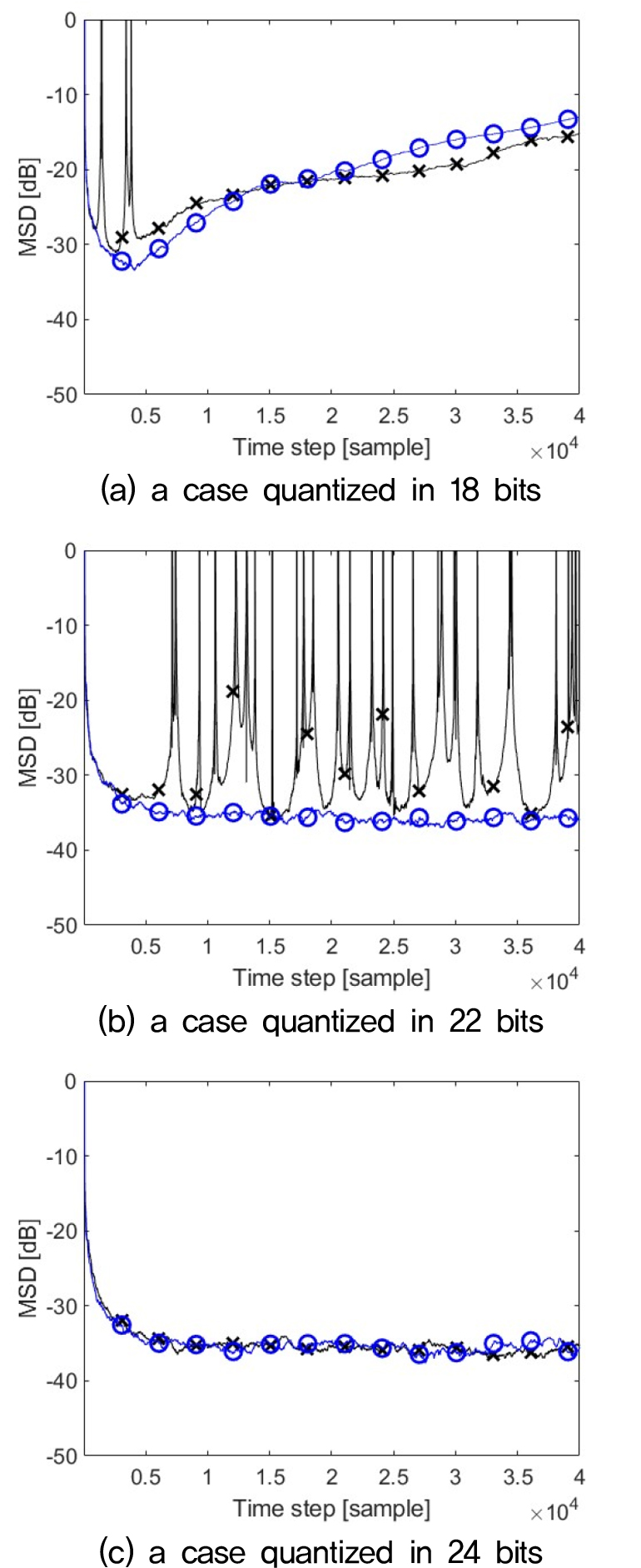
본 실험에서 양자화하는 것을 양자화 잡음을 도입하는 것이라고 생각할 수 있으므로, 신호대 양자와 잡음비인 Signal to Quantization Noise Ratio(SQNR)[9] = 6.02 Bn + 1.76 dB(여기서 Bn은 비트 수)를 사용하여 Fig. 3의 결과를 다시 살펴보면, 기존 RTLS가 24 bit에서 내는 성능을 제안한 알고리즘은 19 bit에서도 유지할 수 있으므로, SQNR측면에서 30.1 dB 정도의 이득이 있다고 할 수 있다. 이외에도 2장에서 언급한 것과 같이 사용처가 센서 네트웍일 경우에는 워드 길이가 줄어서 생기는 노드간 통신량의 절약과 하드웨어의 단순화 등의 이득도 함께 예상할 수 있어서, 제안한 알고리즘이 II장에서 구한 25 %의 계산량 증가를 손실로 고려한다고 해도 기존 알고리즘에 비해 개선된 것이라고 할 수 있다.
