

I. 서 론
초음파는 임의의 매질의 탄성적 특성을 비파괴적으로 살펴보고자 할 때 널리 사용된다. 그 중에서도 유도초음파는 박막의 물성을 평가하는 데 있어서 효과적이다. 유도초음파는 판에 입사한 파와 판 내부에서 경계면에 의해 반사된 파가 결합하여 탄성파의 형태로 판을 따라 진행되는 파를 의미한다. 초음파가 판에 입사하는 경우 반사파는 모드 변환이 일어나 초기파와는 다른 모드로 나타나기도 하는데, 이 때 모드 변환에 관여하는 것은 종파와 수직횡파이다. 이 두 모드가 서로 결합하여 형성된 유도초음파를 램파라 한다. 램파에는 크게 대칭 모드와 반대칭 모드의 두 가지 모드가 존재하며, 파의 주파수와 판의 두께에 따라 기본 모드인 S0와 A0의 고조파(harmonics)가 관측되기도 한다. 특히 파의 주파수와 판의 두께의 곱이 작을수록 더 적은 개수의 모드들이 나타나며, 본 연구에서는 분석의 용이성과 표면파를 발생시키지 않기 위해 100 μm 두께의 얇은 시편을 사용하여 실험하였다.
램파는 주파수에 따라 속도가 변화하는 분산성을 가지고 있기 때문에 표면파에 비해 그 전파양상이 보다 복잡하다. Sasaki가 후방산란 현상을 보고한 이래로,[1] 누수 초음파는 재료 물성 평가에 많이 사용되어 왔으며 램파의 전파 특성을 분석하기 위해 후방복사법을 이용하여 누수 램파를 측정하였다.[2,3] 그러나 이 방법들은 스넬의 법칙을 만족하는 각도에서 검출되는 강한 신호를 이용하는 것이기 때문에 연직에 대한 탐촉자 각도를 조금만 다르게 측정하더라도 데이터가 실제와 크게 다른 값을 가질 수 있고, 램파를 반사시켜주는 모서리가 필요하다는 한계를 가진다.[3]
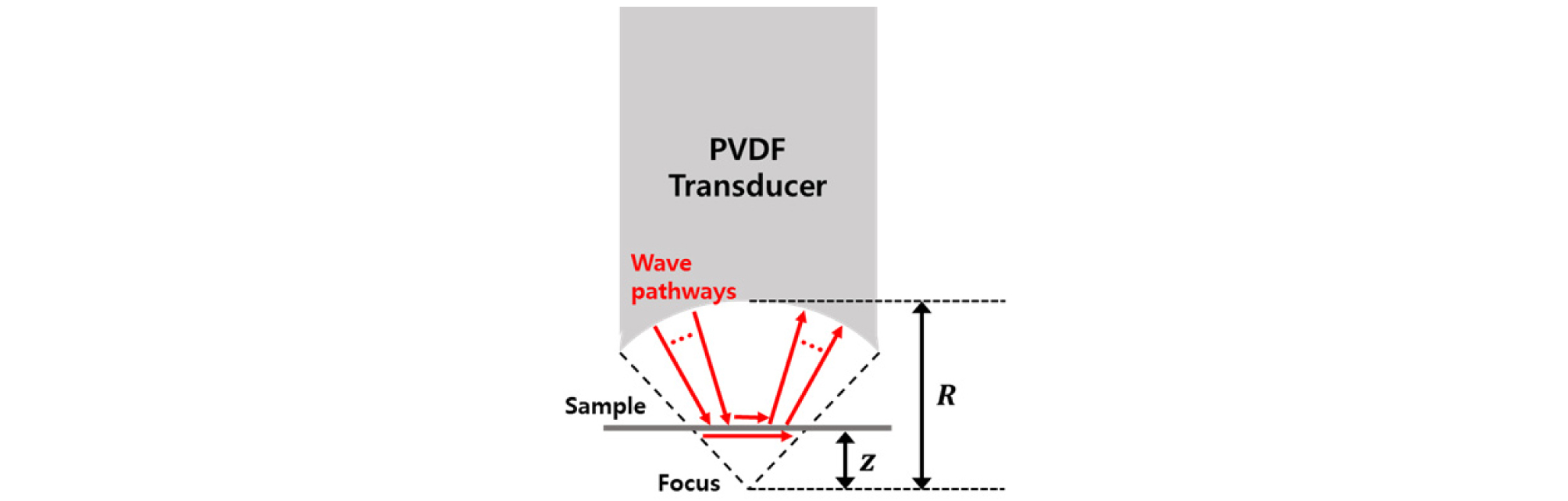
이러한 한계점을 해결하기 위하여 본 연구에서는 Fig. 1과 같이 대구경 PVDF(Polyvinylidene Fluoride) 선집속 탐촉자를 이용하였다. 대구경 선집속 탐촉자는 파를 한 방향으로 보내는 역할을 하며, 임계각을 측정할 필요 없고, 시료의 경계면에 구애받지 않기 때문에 기존 측정방법에서 발생한 오차를 크게 줄일 수 있다.
재료 물성을 평가하는 하나의 방법으로서 음향 렌즈로 선집속된 파를 서로 다른 비초점 거리에 대해 발생시키고, 그 신호를 분석하는 V(z) 방법이 제안되었다.[4] 그 후 음향렌즈를 사용하지 않고 압전 소자인 PVDF 필름을 이용하여 입사각을 정교히 조절하는 대신 비초점 거리를 움직여 신호를 분석하는 대구경 PVDF 선집속 탐촉자가 개발되었다.[5] 이 탐촉자를 이용하여 분산성이 없는 표면파 신호를 분석하는 연구가 진행되었으며,[6,7] 분산성을 가진 램파 역시 연구되었으나 이는 등방성 매질에 대한 연구이다.[8,9]
이방성은 방향에 따라 다른 물리적 성질을 가지는 것을 의미하며, 음파가 이방성 매질을 따라 전파하는 경우 방향에 따라 탄성계수가 다르기 때문에 방향에 따라 다른 전파 속력을 가지게 된다. 이는 램파의 분산곡선 역시 하나로 정해지는 것이 아니라, 방향에 따라 다르게 나타남을 의미한다. 더 나아가, 이방성 매질에서는 에너지의 전달 방향인 군속도와 파동의 진행 방향인 위상 속도의 방향이 일치하지 않는 빔스큐(beam skewing) 현상이 발생하기도 한다.
이방성 매질에 대한 연구는 주로 표면파에 대해서 이루어진 편이며,[6,7,10,11] 램파의 경우도 CFRP와 같이 이방성이 큰 복합재료에 대한 연구가 대부분이다.[12-14]
기존에 단일 탐촉자를 이용하여 단결정 이방성 매질에 대해 램파의 전파를 분석하는 연구가 이루어졌다.[15] 그러나 이와 같은 경우 탐촉자의 각도가 미세하게 변하더라도 데이터는 크게 변할 수 있으며, 신호가 경계면의 영향을 받기 때문에 시편의 정렬이 결과에 영향을 미칠 수 있다.
램파는 표면파와 달리 분산성을 가지고 있기 때문에, 탐촉자가 측정한 V(z) 곡선이 뚜렷한 피크 이외에도 여러 작은 신호들을 가지고 있다. 이 신호들은 주파수 성분 별로 임계각이 다르기 때문에 나타나는 것으로, 이들을 분리하기 위해서는 고속 푸리에 변환(Fast Fourier Transform, FFT)과 같은 별도의 신호 처리 과정이 필요하다.
실리콘 웨이퍼는 결정 구조 때문에 방향에 따라 다른 탄성 계수를 가진다.[16] 본 연구에서는 대구경 PVDF 선집속 탐촉자를 이용하여 (100), (111) 실리콘 단결정 웨이퍼에 대하여 방향에 따른 램파의 전파 특성을 분석하였다. 탐촉자와 시편 사이의 거리를 변화시키면서 받아들인 V(t,z) 신호로부터 시간에 대해 FFT를 진행하여 V(f,z) 신호를 얻어냈고, 이를 다시 z에 대해 FFT하여 특정 주파수에서의 위상 속도를 계산할 수 있었다. 이 과정을 시편의 모든 방향에 대해 진행하여 최종적으로 방향에 따른 램파의 분산곡선을 얻을 수 있었다. 이 분산곡선을 각 실리콘 웨이퍼의 결정 구조와 비교하여 경향성을 분석하였다.
II. 실험 장비
2.1 시험편
시험편은 p형 실리콘 웨이퍼로, 두께는 100 μm이고, 지름은 50 mm이다. 방향은 (100)와 (111), 두 종류를 사용하였다.
2.2 PVDF 선집속 탐촉자
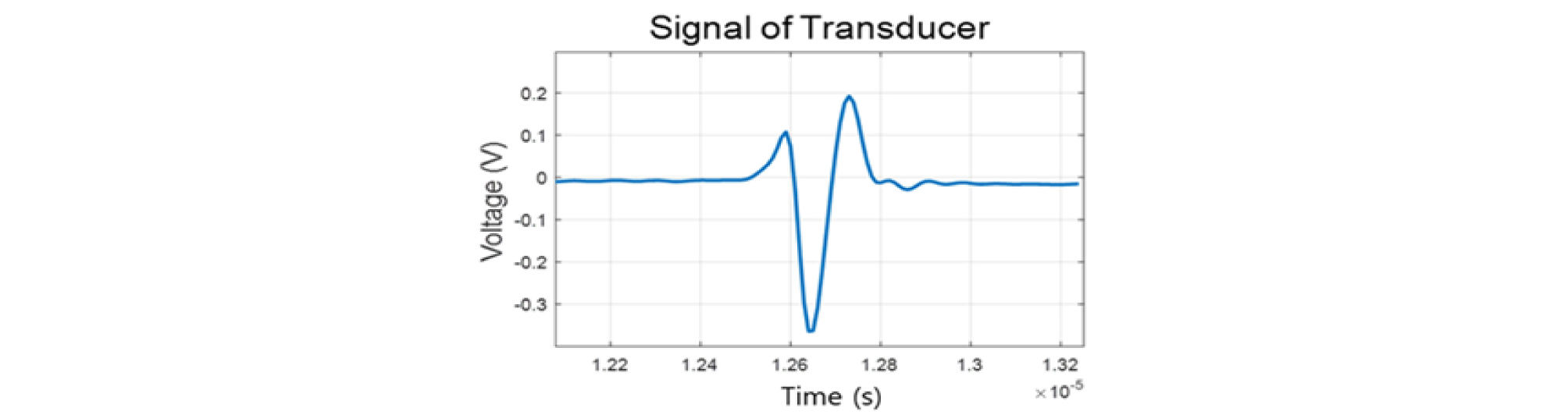
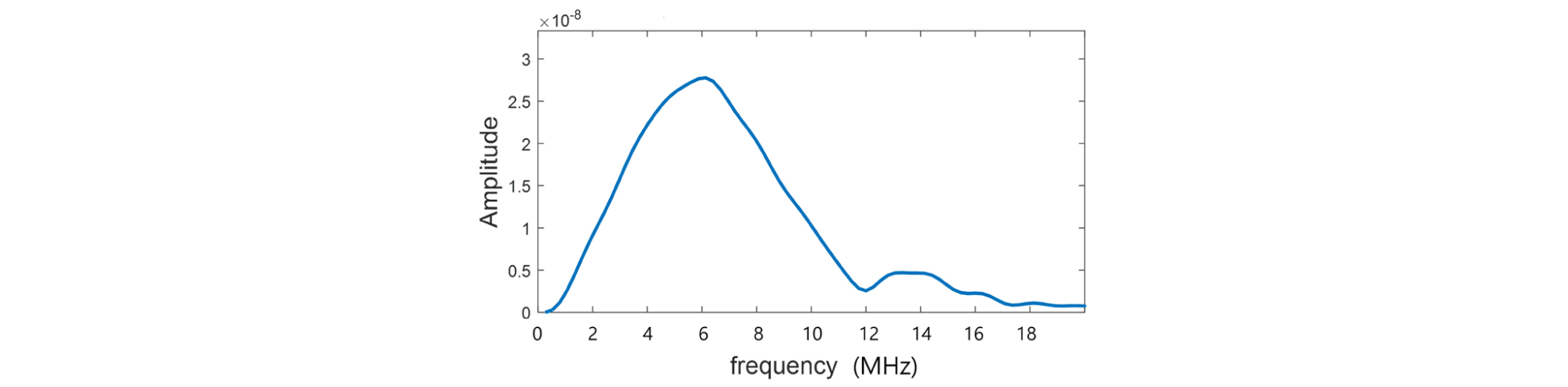
PVDF 탐촉자는 곡률 반지름 40 mm의 아크릴 후면체에 PVDF 필름을 고정시키고, 전극을 연결하여 제작하였다. 신호가 후면체의 위쪽 면으로부터 다시 반사되어 돌아오는 것을 줄이기 위해 톱니 모양으로 만들었다. 용융석영(fused quartz) 표면에서 반사되는 탐촉자 신호를 측정한 신호와 FFT한 결과를 Figs. 2와 3에 나타내었고, 그 결과로 제작된 탐촉자는 중심주파수는 약 6 MHz 이고, -6 dB 대역폭에서 3 MHz ~ 9 MHz의 넓은 영역의 주파수 대역을 가진다는 것을 알 수 있었다.
2.3 탐촉자 작동 장치
본 실험에서는 탐촉자의 초점과 시편 사이의 거리 z를 변화시키고, 시편을 180° 회전시키면서 측정하기 위해 Fig. 4의 실험 장치를 사용하였다.
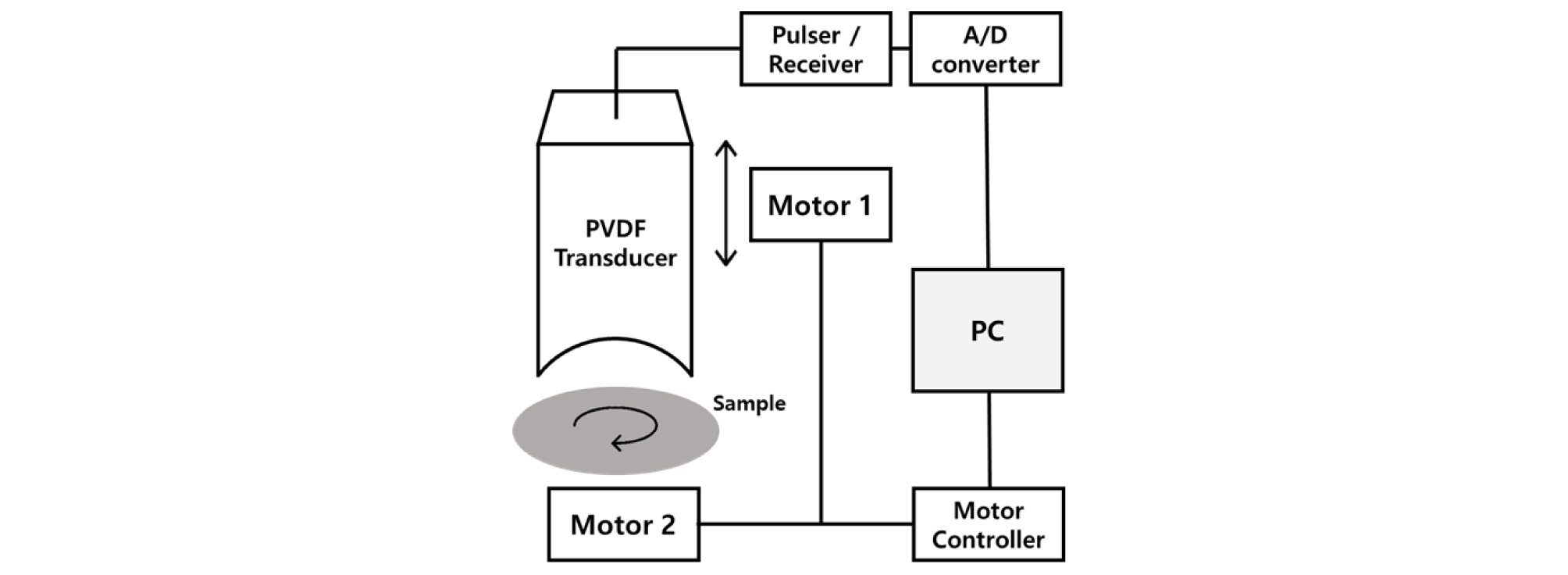
모터 1은 선형 스테이지에 연결되어 있어, 탐촉자와 시편 사이의 거리를 조절한다. 본 연구에서는 z 값을 총 30 mm를 400 단계에 걸쳐서 변화시켰다. 모터 2는 시편을 회전시키는 역할로, 1° 간격으로 총 180° 회전시켰다.
Pulser/Receiver에서는 1.00 kHz로 펄스를 발생시켰고, 200번의 시간평균 통해서 노이즈를 줄였다. A/D 변환기는 12 bit 분해능으로 최대 초당 2×108 샘플을 취할 수 있다.
III. 신호 분석
램파는 분산성을 가지기 때문에 참고문헌[4,8,9]에 소개되어 있는 V(z) 곡선을 통해서 주파수 성분별 위상속도를 구하는 방법을 변형하여 사용하였다.
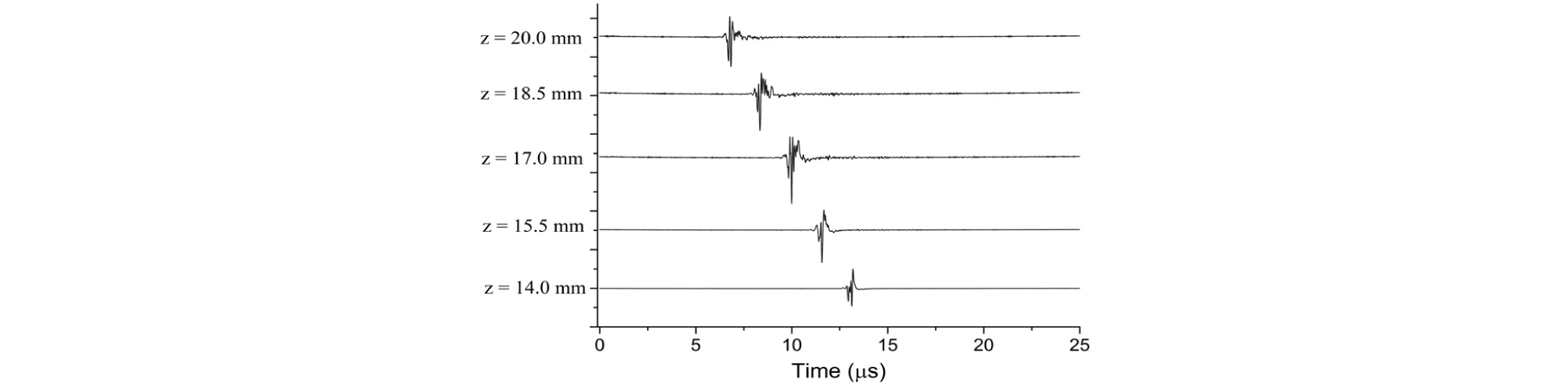
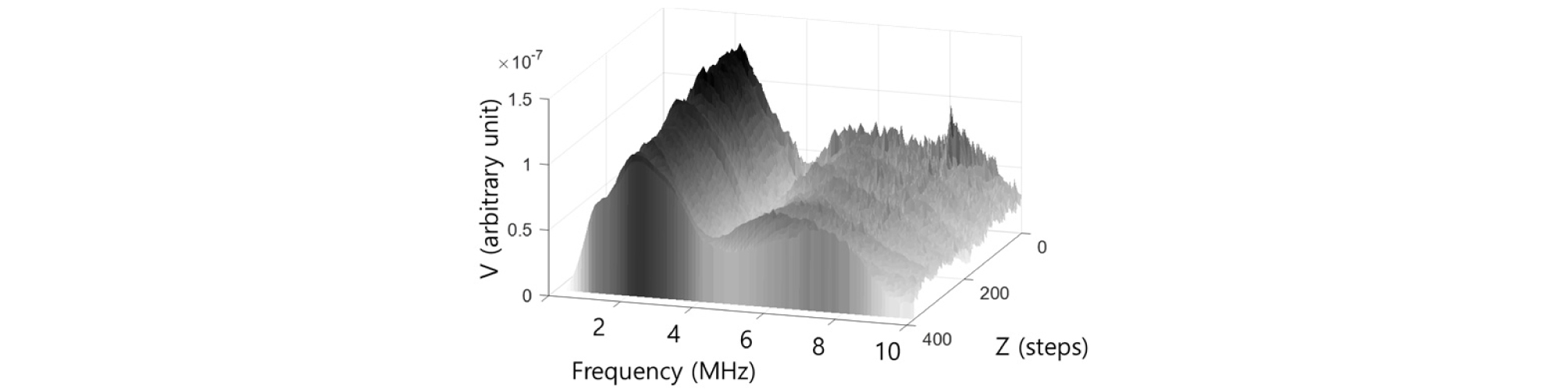
Fig. 5와 같이 z값을 변화시키면서 얻은 신호들을 시간에 대해 푸리에 변환한다. 그렇다면 Fig. 6에 3차원으로 묘사된 V(f,z) 데이터를 얻을 수 있다.
V(f,z) 데이터에서 탐촉자가 발생시키는 중심 주파수인 6 MHz 근처의 성분들을 집중적으로 분석하였다. Fig. 7과 같이 특정 주파수에서 V(z) 곡선을 보면, z값의 변화에 따라 보강 및 상쇄 간섭이 일어나게 되어 주기성이 나타난다.
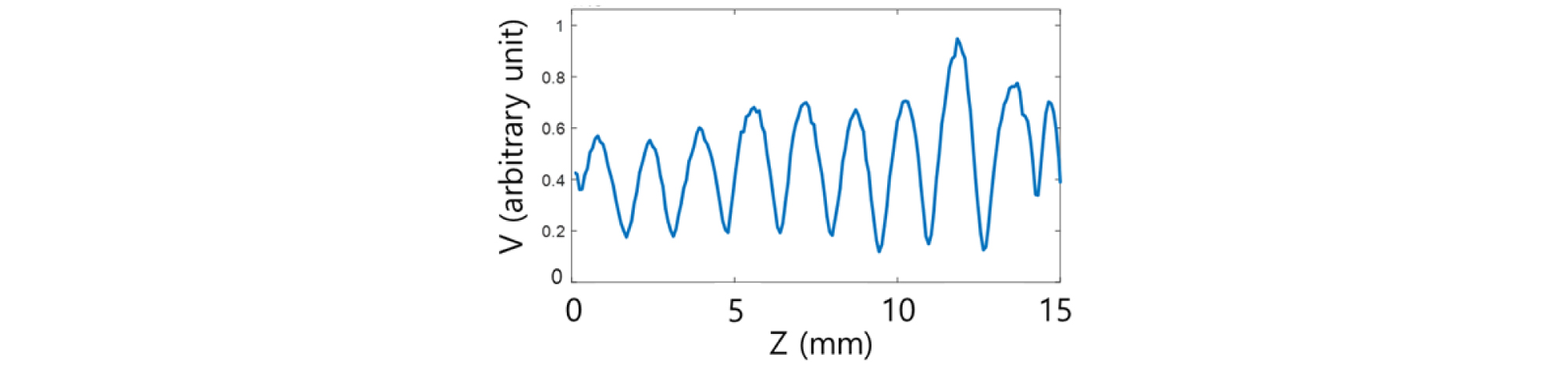
여기서 V(z) 곡선의 주기인 △z를 파악하기 위해서 z 대해서 한 번 더 FFT를 하게 되면 Fig. 7과 같은 진동 양상이 관찰된다. 4 MHz에서 가장 명확한 진동 양상이 나타났다. z 값의 총 변화량이 크지 않기 때문에 1/z 축의 분해능을 증가시킬 필요가 있다. 총 샘플 길이의 10배에 해당하는 0을 데이터에 포함시켜서 분해능을 증가시켜 △z의 정확도를 늘렸다.
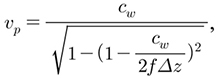
Fig. 7로부터 얻은 △z의 값으로부터 매질에서 램파의 위상속도 vp는 다음 식으로 얻을 수 있다.[4]
 (1)
(1)
여기서 cw는 물에서의 음속, △z는 V(f,z)곡선에서의 진동 주기, f는 해당 주파수이다.
선집속 탐촉자는 방향성을 가지기 때문에 1° 간격으로 위상 속도 측정을 반복하여 실리콘 판재의 이방성을 평가하였다. 실리콘은 CFRP와 같은 이방성 물질에 비해서 이방성이 적은 편이기 때문에 선집속 탐촉자의 방향과 램파의 진행 방향이 거의 같다고 가정할 수 있었다.
IV. 결과 및 토의
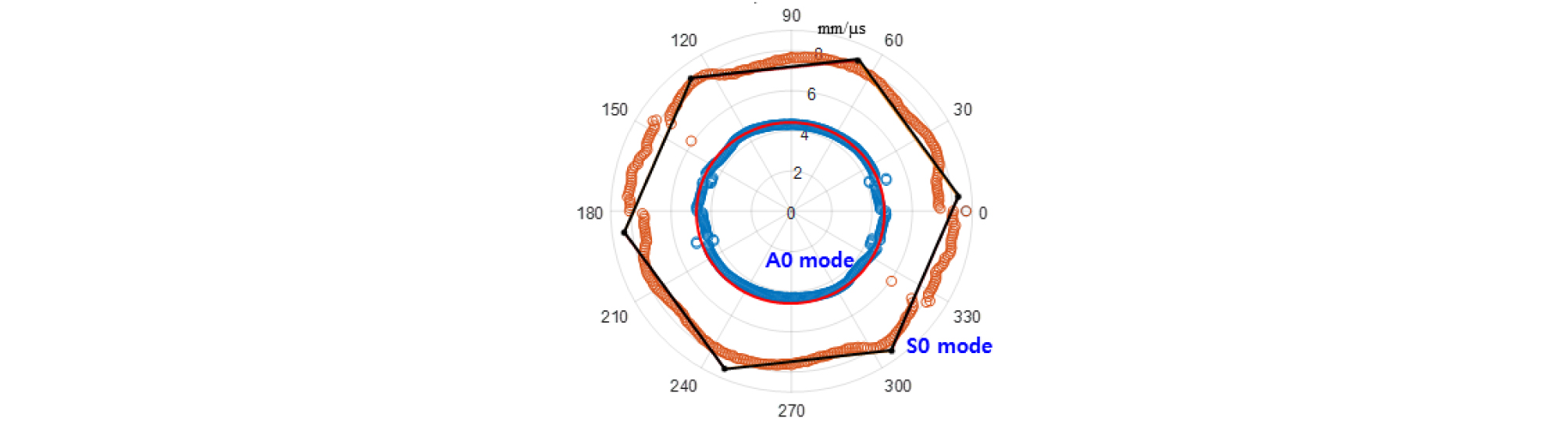
(100)과 (111) 실리콘 웨이퍼에서 1° 간격으로 방향에 따른 램파의 위상속도를 구하여 각각 Figs. 9과 11에 나타내었다. 그래프의 방사방향은 램파의 위상속도이고 각도 방향은 램파가 진행한 방향을 나타낸다. 램파 모드 중에서 A0 모드와 S0 모드를 관찰하였다. Figs. 8 ~ 11에서의 0°는 플랫의 방향을 이용하여 [110] 방향으로 설정하였다.
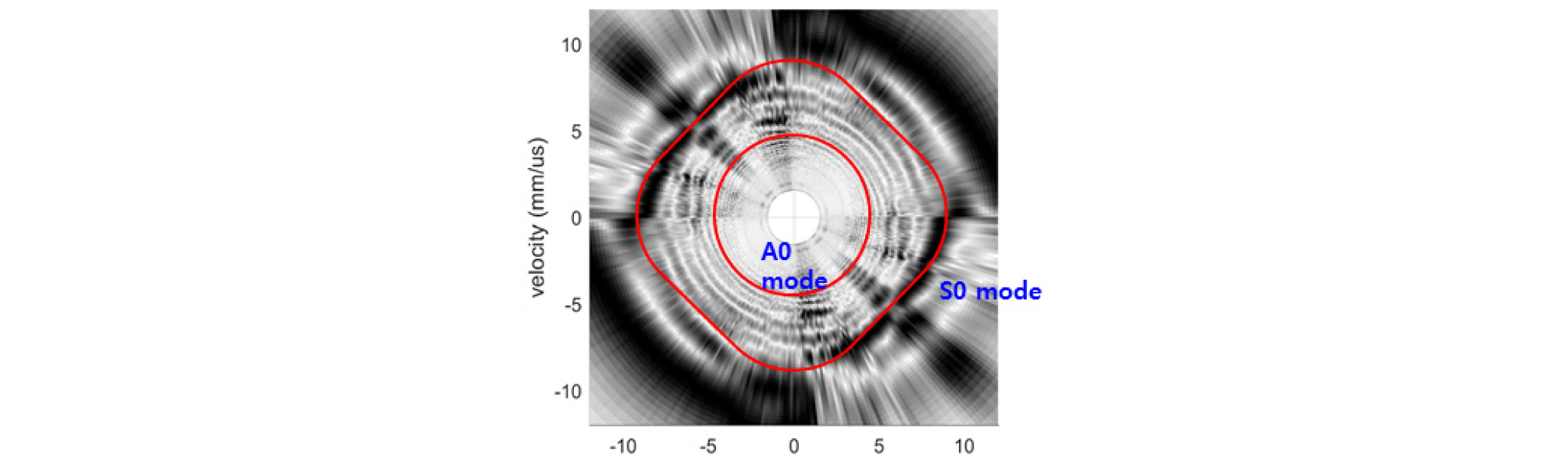
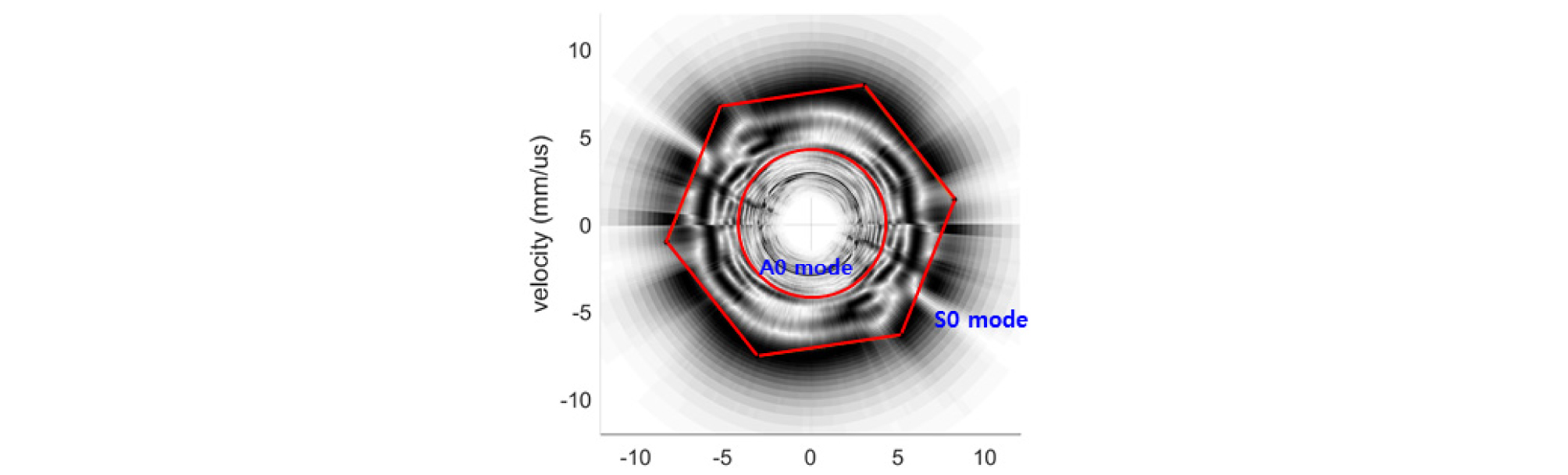
Fig. 8은 V(z) 곡선을 z에 대해 FFT한 결과인 A(1/z) 곡선을 램파의 진행방향에 따라 360° 회전시켜 3차원 그래프로 그린 후, 사영시켜 2차원 극좌표 형태로 그린 그래프이다. 이때 180°에 대한 데이터를 이용하여 360°에 대해 재구성하였다. 그래프의 반지름 방향은 위상속도, 각도방향은 램파의 진행방향을 나타낸다. 진폭이 큰 부분은 검은색, 작은 부분은 흰색으로 나타냈다. Fig. 8에서 속도가 다른 여러 가지 모드들이 나타나는 것을 확인할 수 있다. 이중 램파의 A0모드와 S0모드에 해당하는 성분들의 위상속도를 구하여 진행방향에 따른 램파의 위상속도 그래프를 구하였다(Fig. 9). 대체적으로 낮은 주파수 근처에서 A0 모드의 속도는 횡파의 속도와 유사하고, S0 모드의 속도는 종파의 속도와 유사하므로 각 그래프가 어떤 모드의 램파에 대응되는지 결정할 수 있다.[17]
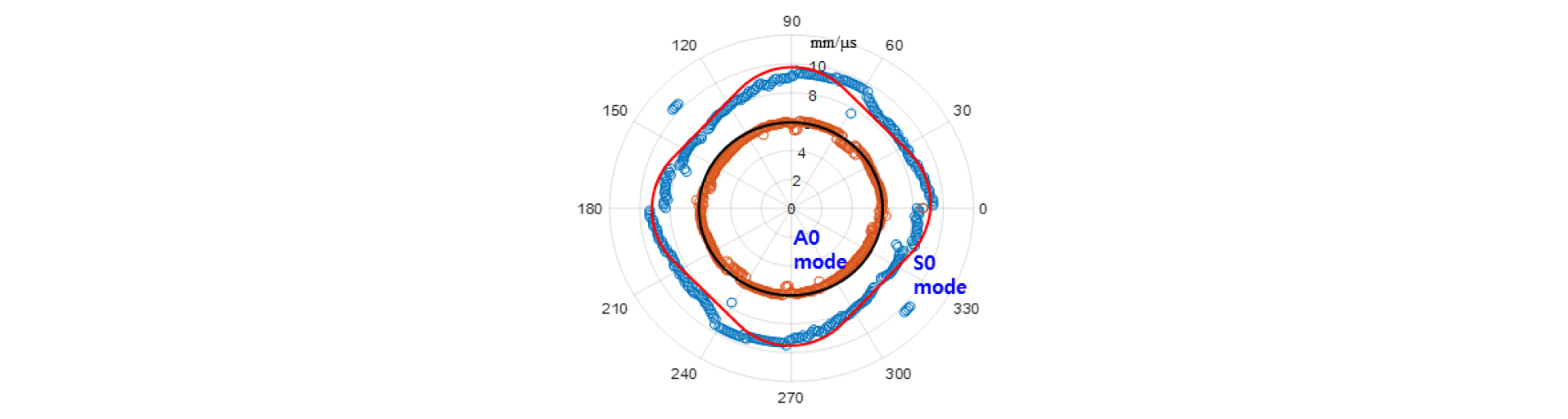
(100) 실리콘 웨이퍼에서 A0 모드의 경우 방향에 따른 위상속도가 5.9 mm/μs 정도로 일정하였고, S0 모드의 경우 방향에 따른 위상속도가 7.8 mm/μs ~ 9.0 mm/μs 사이에서 변하였다. 특히 S0 모드에서는 방향에 따른 위상속도가 90° 간격으로 대칭적으로 나타났는데, 이는 (100) 실리콘 웨이퍼의 결정구조가 90° 간격으로 대칭성을 가지고 있기 때문인 것으로 예상된다.
(111) 실리콘 웨이퍼에서는 A0모드의 경우 방향에 따른 위상속도가 4.5 mm/μs 정도로 일정하였고, S0 모드의 경우 방향에 따라 7.2 mm/μs ~ 8.2 mm/μs 사이에서 변하였다. S0 모드에서는 방향에 따른 위상속도가 60° 간격으로 대칭적으로 나타났는데, 이는 (111) 실리콘 웨이퍼의 결정구조가 60° 간격으로 대칭성을 가지고 있기 때문인 것으로 생각된다.
Figs. 9와 11 모두에서 램파 A0 모드의 방향에 따른 위상속도가 일정한 반면에, S0 모드의 위상속도가 방향에 따라 대칭적으로 변하는 것을 확인할 수 있다. 램파의 A0 모드에서는 파의 진행방향에 수직인 방향의 진동이 우세하다. 이때 파의 진행방향에 수직인 방향은 (100) 실리콘 웨이퍼의 경우 (100) 방향, (111) 실리콘 웨이퍼의 경우 (111)방향이므로 램파의 진행방향이 달라져도 진동이 일어나는 결정방향은 일정하고 물리적인 성질도 같다. 따라서 램파의 A0모드는 등방성을 띠게 되어 Figs. 9와 11에서 A0모드의 속도분포는 원형을 띠게 된다.
반면에 램파의 S0 모드에서는 파의 진행방향과 같은 방향의 진동이 우세하다. 램파가 실리콘 웨이퍼면을 따라 진행하게 되는데, 진행방향이 변하면 매질이 진동이 일어나는 결정방향도 달라지게 된다. 웨이퍼의 결정방향이 달라지면 탄성계수도 달라지므로 위상속도가 변하게 된다. 따라서 (100) 실리콘 웨이퍼의 경우 결정구조가 90° 간격으로 대칭적이기 때문에 방향에 따른 위상속도가 90° 간격으로 대칭성을 가지게 되어 Fig. 9에서 속도분포가 사각형 형태를 띠게 된다. (111) 실리콘 웨이퍼의 경우 방향에 따른 위상속도가 60° 간격으로 대칭적이기 때문에 Fig. 11에서 속도분포가 육각형 형태를 띠게 된다. 따라서 램파의 S0모드를 이용하면 실리콘 웨이퍼의 이방성을 평가할 수 있음을 확인하였다.
V. 결 론
방향에 따른 램파의 위상속도를 통해 판재의 이방성을 평가할 수 있다는 것을 확인하였다. 특히 결정방향에 따른 S0모드의 성질을 이용하여 판재의 결정방향을 추측할 수 있음을 확인하였다.
이번 연구에서 대구경 선집속 탐촉자를 사용함으로써 References [3], [15]의 기존의 단일 탐촉자 측정방법이 가지고 있었던 한계점을 극복하였다. 기존의 단일 탐촉자를 사용한 램파 측정방법은 시편에 수직인 방향에 대해 탐촉자가 기울어진 각도에 의해 위상속도가 결정되었기 때문에 각도 값의 오차에 의한 위상속도 값의 측정오차가 컸다. 하지만 대구경 선집속 탐촉자를 이용해 위상속도를 측정하는 경우 탐촉자가 기울어진 각도에는 별로 영향을 받지 않는다.
또한 대구경 선집속 탐촉자를 사용할 경우 위상속도 값이 판재의 가장자리 형태에 영향을 받지 않는다. Reference [15]에 소개된 기존의 탐촉자 측정방법에서는 시편의 가장자리에서 반사되는 램파의 위상속도를 측정하였으므로 시편의 가장자리 형태가 원형이어야 하지만, 대구경 선집속 탐촉자의 경우에는 모서리가 필요하지 않기 때문에 판재의 가장자리 형태에 영향을 받지 않는다.
