

I. 서 론
II. 북극해 음향실험(KAMAS-24)
2.1 실험 개요
2.2 음파전달손실 측정
III. 음파전달손실 신호 분석
3.1 음파전달손실 계산
3.2 수직선배열센서의 배열신호 빔형성
3.3 해빙에 의한 반사신호의 도달각 변동
IV. 결 론
I. 서 론
북극해는 여름철을 제외하면 대부분의 기간 동안 해수면이 해빙으로 덮여있어서 수중에서 음파가 전달과 산란 되는 과정에서 해빙과 간섭이 발생하여 독특한 현상이 나타난다. 북극해에서의 음파전달은 1950년대 후반에 잠수함이 해빙 아래에서 항해할 수 있게 되면서부터 본격적인 연구가 진행되었다.[1] 독특한 특성을 보이는 해빙 해역의 음파전달 환경을 관측하기 위한 다수의 연구가 수행되어오고 있으며 군사, 경제, 그리고 환경 관련 연구에 목적을 두고 있다.[2,3] 음파전달 환경의 관측은 수중소음, 음파전달, 그리고 음파산란 등을 포함하며, 소나, 항해, 수중통신, 그리고 기후변화 등의 연구에 활용되고 있다. 냉전 기간에 북극해에서 30 Hz 이하의 음원을 이용해 수백 km의 장거리 음파전달 실험을 수행했다.[4] 1994년에 미국은 19.6 Hz의 음원으로 위상변조신호를 송신하여 스발바드에서부터 링컨해까지 관통하는 2,630 km 거리에서 음파전달 실험인 Transarctic Acoustic Propagation(TAP)를 수행했다. 후속 실험으로 1998년부터 1999년까지 미국과 러시아가 공동으로 20.5 Hz 음원으로 유사한 경로에서 장거리 실험인 Arctic Climate Observations using Underwater Sound(ACOUS)를 진행했다. Mikhalevsky et al.[5,6]은 이 실험에서 음파전달 신호로부터 수중의 수온 등을 역산하는 음향 토모그래피 분석을 수행했다. 북극해의 캐나다 분지에서 공간 해상도를 높여 장거리 저주파 음파전달과 수중소음의 특성을 연구하기 위한 실험인 CANAPE가 2016년부터 미국 주도로 수행되었다.[7,8,9] 이 실험에는 Scripps Institute of Oceanography, University of California(SIO), Naval Postgraduate School (NPS), Woods Hole Oceanographic Institute(WHOI), Naval Research Laboratory(NRL) 등의 연구 기관이 참여했다. CANAPE에서는 저주파 송수신기를 이용하여 150 km 거리의 전달손실과 음파의 도달시간과 도달각 등의 변동을 관측하였다. 미국의 Office of Naval Research(ONR)은 지구의 온난화에 의한 북극해의 영향을 파악하고 대안을 마련하기 위한 연구를 진행하고 있다.[10,11] Stratified Ocean Dynamics of the Arctic (SODA)와 Arctic Mobile Observing System(AMOS) 연구를 통해 보퍼트해의 상층 환경을 이해하고 음향기반으로 신뢰성 높은 수중항해 시스템을 개발하기 위한 관측과 프로토타입을 시험하는 연구가 현재 진행 중이다. ICe EXercise(ICEX)는 미해군이 주관하고 나토 국가가 참가하며, 미국의 Woods Hole Oceanographic Institute(WHOI)과 Aplied Physical Laboratory (APL) 등이 참여하여 기후변화 등에 의한 음향탐지 환경을 연구하고 있다.[12] 한국해양과학기술원 부설 극지연구소에서는 저주파 음원을 이용한 음파전달과 수중 소음의 특성에 대한 연구를 진행하였다. Han et al.[13]은 2017년에 동 시베리아해의 천해 정점에서 해저에 수신기를 설치하고 수중소음을 1년 동안 관측하고 분석하였다. 또한 Han et al.[14]은 서북극해의 천해 영역에서 자원탐사용 저주파음원을 이용해 음파전달손실을 관측하였다.
지금까지 북극해에서 수행된 대부분의 음파전달 실험은 장거리 전달의 중요성이 강조되며 저주파가 사용되었다. 음파전달에 영향을 미치는 해빙의 영향을 세밀하게 보기 위해서는 경우에 따라서 저주파수 보다는 중주파수가 유리하다. 본 논문에서는 2024년 8월에 서북극해에서 수행한 음파전달실험인 Korea Acoustic Measurement in the Arctic Sea in 2024(KAMA-24)에서 2,000 Hz – 4,000 Hz 대역의 중주파수 펄스를 이용하여 중거리에서 수직선배열센서로 측정한 음파전달 신호의 특성을 기술하였다. 2장에서는 실험의 개요와 방법을 기술였다. 3장에서는 신호분석 방법과 빔형성 결과를 기술하고, 이어서 모델링 결과와 비교하여 설명하고, 마지막으로 해빙에 의한 음파전달 신호의 도달각 변동을 설명한다. 해빙으로부터 반사된 신호의 도달각의 변동은 해저면으로부터 반사된 신호의 도달각의 변동과 비교하면 매우 크게 나타났다.
II. 북극해 음향실험(KAMAS-24)
2.1 실험 개요
북극해에서 해빙의 영향에 의한 음파전달 특성을 파악하기 위하여 직접 현장 실험을 수행하였다. KAMAS-24에서는 2024년 7월 30일부터 8월 26일 동안의 항해 중에 북극해의 축치해와 동시베리아해 해역에서 해빙 해역의 수중소음, 해빙에 의한 음파산란과 반사계수, 그리고 중거리 음파전달손실을 측정하였다. 한국해양과학기술원 부설 극지연구소의 쇄빙선인 아라온호에 승선하여 국방과학연구소와 실험용역을 수행하는 기관인 한국해양과학기술원과 극지연구소가 참여하여 실험을 수행하였다. KAMAS-24 실험을 설계하기 위해 송신기와 수신기의 거리와 심도를 결정하기 위한 환경분석을 사전에 수행하고, 다중경로 음파전달과 수신 신호의 품질을 고려하여 송신 펄스를 설계하였다. 실험 설계를 바탕으로 측정 계획을 수립하고, 북극해 현장의 상황에 따라 조정하며 실험을 수행하였다.
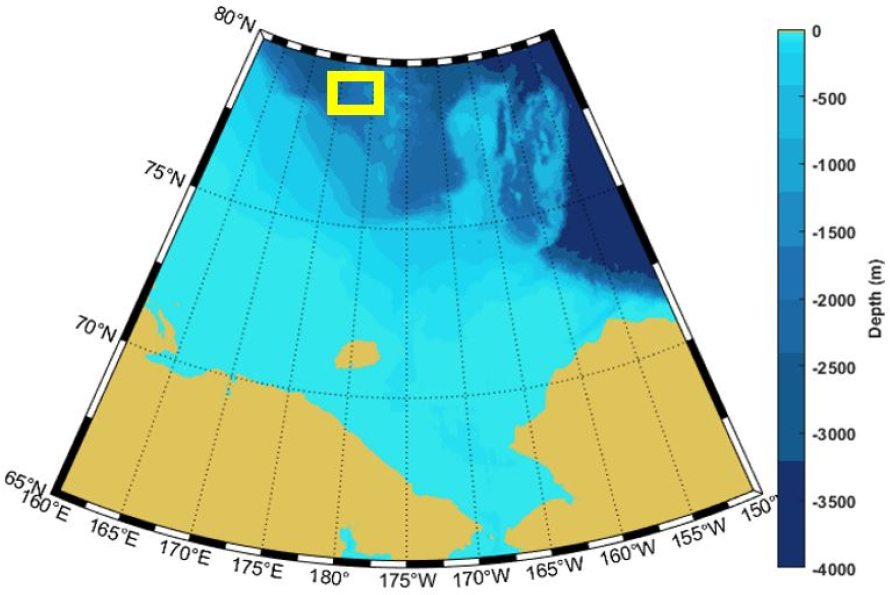
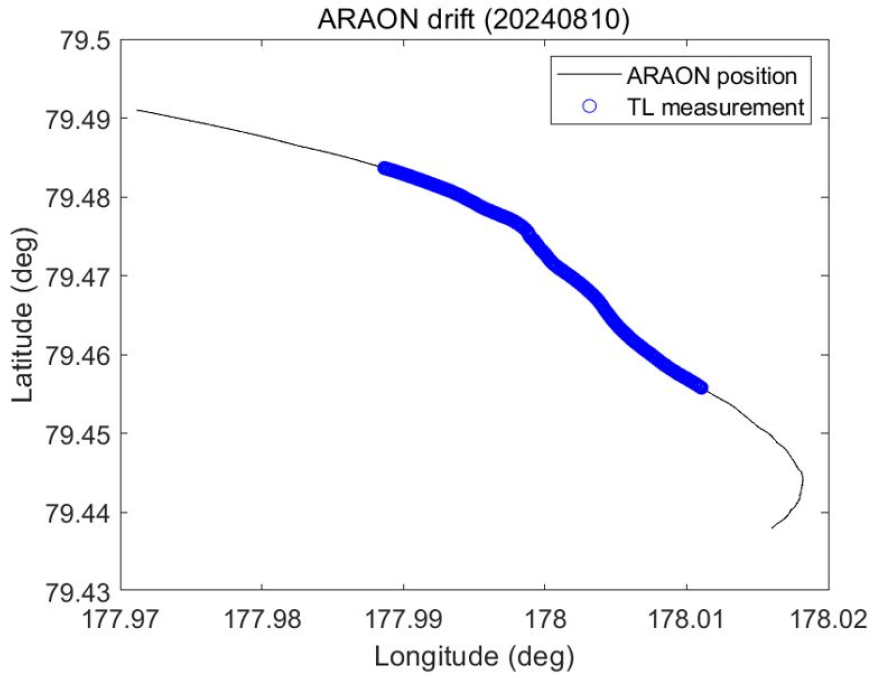
음파산란, 반사계수, 그리고 음파전달손실은 유빙 형태의 대형 해빙에 아라온호를 정박하고 2024년 8월 6일부터 8월 11일 까지 해빙 위에서 측정하였다. 해빙 위에서 수행한 음파전달 실험은 헬기를 동원한 해빙 탐색, 해빙 변수(두께, 거칠기 등) 조사, 송수신기 설치 위치 선정 및 천공, 그리고 송신 및 수신 등을 포함하였다. 이번 논문에는 KAMAS-24 실험 중에서 Fig. 1에 노란색 네모로 표시된 구역에서 Fig. 2와 같이 해빙을 따라 표류하면서 수직선배열센서를 이용하여 측정한 음파전달손실을 분석하고 결과를 제시하였다. 음파전달손실을 측정한 구간에서 해빙의 표류 속도는 약 0.2 m/s이다.
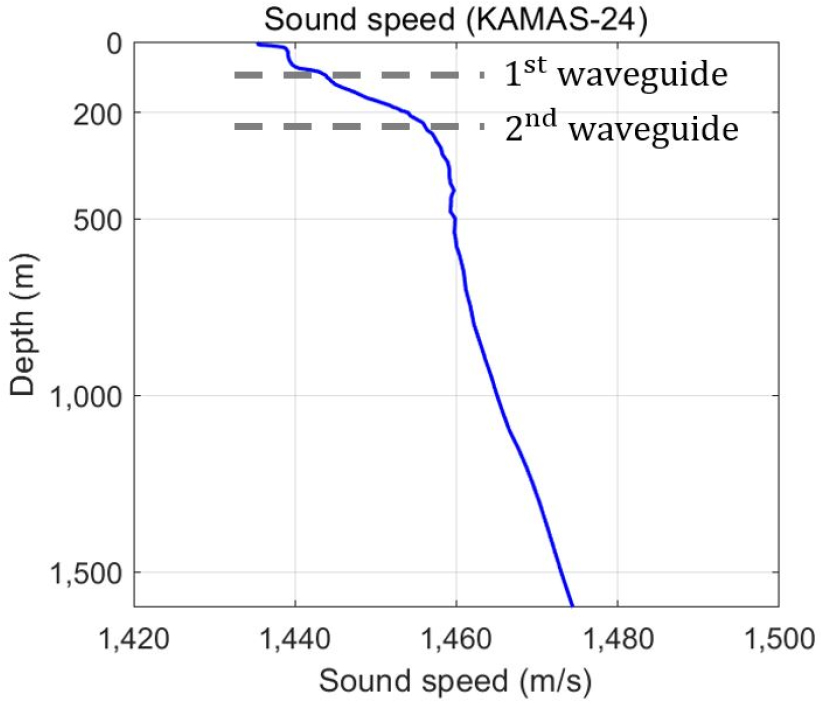
음파전달손실을 측정한 해역의 음속구조는 Fig. 3과 같고 표층에서 대략 1,435 m/s이고 1,600 m에서 약 1,474 m/s이다. 해표면 근처에 얇게 존재하는 첫 번째 도파관이 0 m ~ 85 m에 나타난다. 북극해에서 상층에 나타나는 대표적인 보퍼트 도파관과 유사한 두 번째 도파관의 경계를 약 230 m에서 볼 수 있다.
2.2 음파전달손실 측정
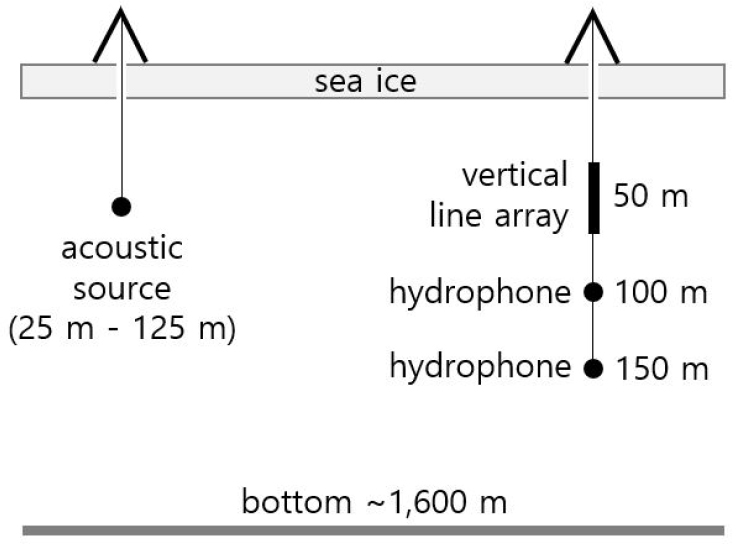
해빙캠프 기간에 해빙 위에서 수행한 음파산란과 전달손실 측정을 위한 송수신기 운용 모식도를 Fig. 4에서 볼 수 있다. 음파전달손실 측정에는 송신기 1대와 수직선배열센서 1대 및 자기기록수신기 2대가 사용되었다. 송신기(ITC4004-A)는 송신빔이 전방향성 특성을 보이며 사용 가능한 주파수는 대략 2,000 Hz – 4,000 Hz 대역이다. 자체 제작한 수직선배열센서는 8채널로 구성된 부배열 2개가 연결되어 있어서 총 16채널이다. 부배열의 설계 주파수는 4,027.8 Hz이고, 부배열 간의 간격은 약 0.736 m이다. 송신기의 심도는 25 m, 50 m, 75 m, 100 m, 그리고 125 m로 변화시키고, 수신기의 심도는 고정하였으며 수직선배열센서의 심도는 50 m이고 자기기록수신기는 각각 100 m와 150 m로 설정하였다. 수심센서에 기록된 실측 심도는 계획한 심도와 3 m 이내의 차이를 나타냈다. 송수신기의 거리는 약 4,200 m이다.
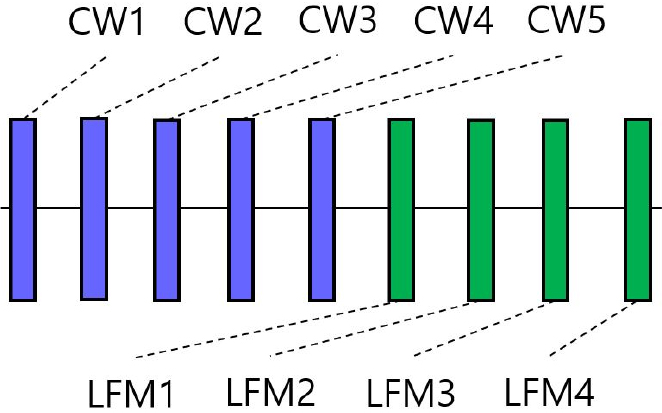
다중경로별 음파전달의 특성을 구분해서 분석하기 위해 짧은 부펄스를 송수신하였다. 송신 펄스는 단일주파수 부 펄스 5개와 선형주파수변조 부펄스 4개로 구성하였다. 단일주파수(Continuous Wave, CW) 부펄스의 주파수는 각각 2,001 Hz, 2,503 Hz, 3,005 Hz, 3507 Hz, 그리고 3,999 Hz이다. 선형주파수변조(Linear Frequency Modulation, LFM) 부펄스의 대역폭은 모두 100 Hz이며, 중심 주파수는 각각 2,050 Hz, 2,450 Hz, 2,950 Hz, 그리고 3950 Hz이다. 부펄스의 길이는 0.5 s이고 간격은 3 s이다. 부펄스의 주파수는 조화간섭이 없도록 설정하고, 부펄스 간의 간격은 다중경로의 시간지연과 송신기의 성능을 고려하여 결정했다. Fig. 5처럼 수신신호에 음향환경의 변동이 동시에 적용되도록 9개의 부펄스를 연결해서 하나의 송신펄스를 구성하고 반복 송신하였다.
III. 음파전달손실 신호 분석
3.1 음파전달손실 계산
음향센서에 수신된 수신신호(RL)는 Eq. (1)과 같이 표시할 수 있으므로 전달손실(TL)은 Eq. (2)와 같이 계산할 수 있다.
여기서는 음향센서에 수신된 시계열신호, RVS는 음향센서의 수신감도, 그리고 G는 이득을 나타낸다.
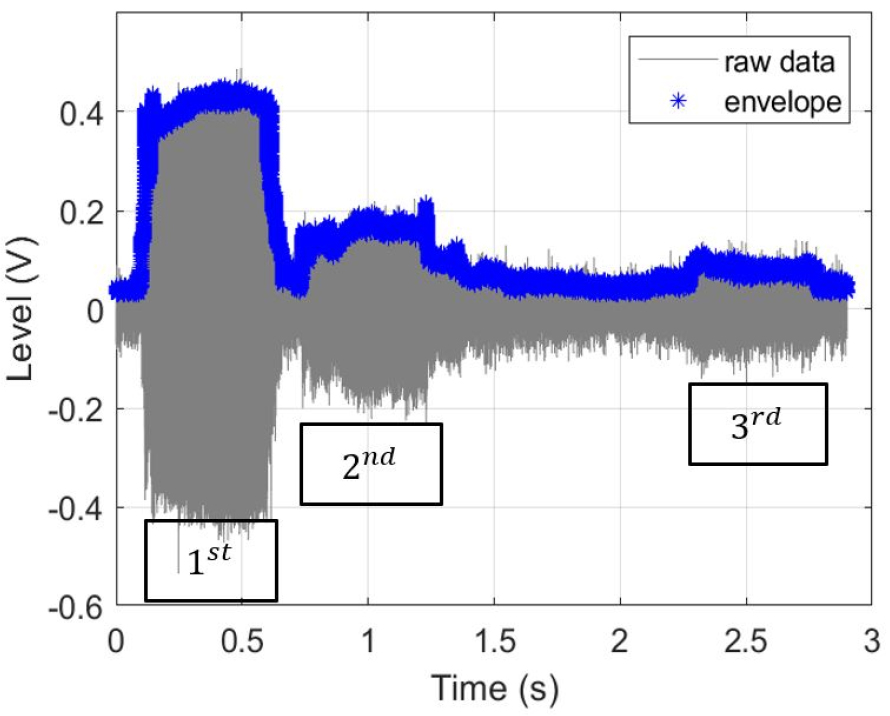
이번 측정에서는 짧은 펄스를 사용했으므로 수신신호에서 펄스의 도달구간을 파악하고 모든 도달구간을 더하여 전달손실을 계산한다. Fig. 6은 수직선배열센서의 1번 채널에 수신된 단일주파수 펄스의 수신신호와 힐베르트 변환 후 포락선을 나타낸 것이다. 음원의 심도를 125 m로 고정하고 송신한 경우이며 단일주파수 펄스의 주파수는 2,503 Hz이고 펄스의 길이는 0.5 s이다. 펄스 신호가 시간 축에서 3개의 구간으로 구분되어 수신되었으며, 3개 구간의 시간은 각각 0.1 s – 0.6 s, 0.7 s – 1.3 s, 그리고 2.2 s – 2.8 s이다. 따라서 Eq. (1)에 따라 신호가 수신된 3개 구간의 값을 더하고 전달손실을 계산했다.
음원의 심도를 5번 변화시키며 약 4 h 동안 신호를 측정했다. 약 0.2 m/s로써 이동하는 하나의 대형 유빙의 가장자리에 4,200 m 간격으로 송신기와 수신기의 위치를 고정하여 설치하였으므로 송수신 거리의 변화는 없었다. 그러나 사후 분석에서 4 h 동안 송수신기의 거리가 점차 약 100 m 가까워졌음을 알 수 있었다. 이것은 송신기와 수신기 사이의 약한 부분에서 갈라짐이 발생하여 송신기와 수신기의 이동 속도와 방향이 달라지면서 가까워졌다고 추정되었다.
Fig. 7은 주파수별로 전달손실을 계산한 결과이며 음원준위, 수신감도와 이득 등을 모두 보상하였다. 30 s 간격으로 송신한 60개의 펄스를 수신한 1,800 s 동안의 전달손실을 펄스의 주파수별로 나타냈다. 60개의 펄스를 송신하는 동안 송수신기의 거리가 대략 20 m 이동하면서 측정하였기 때문에 매시간의 전달손실이 변동하는 것을 볼 수 있다. 1,800 s 동안 주파수가 달라지면서 10 dB 내외의 변동이 나타났다. 송신 주파수 중에서 음원의 송신감도의 영향으로 송신준위가 낮았던 2,001 Hz와 3,999 Hz의 경우 두 번째와 세 번째 구간의 신호대잡음비가 높지 않아 전달손실 계산에서 제외하였다.
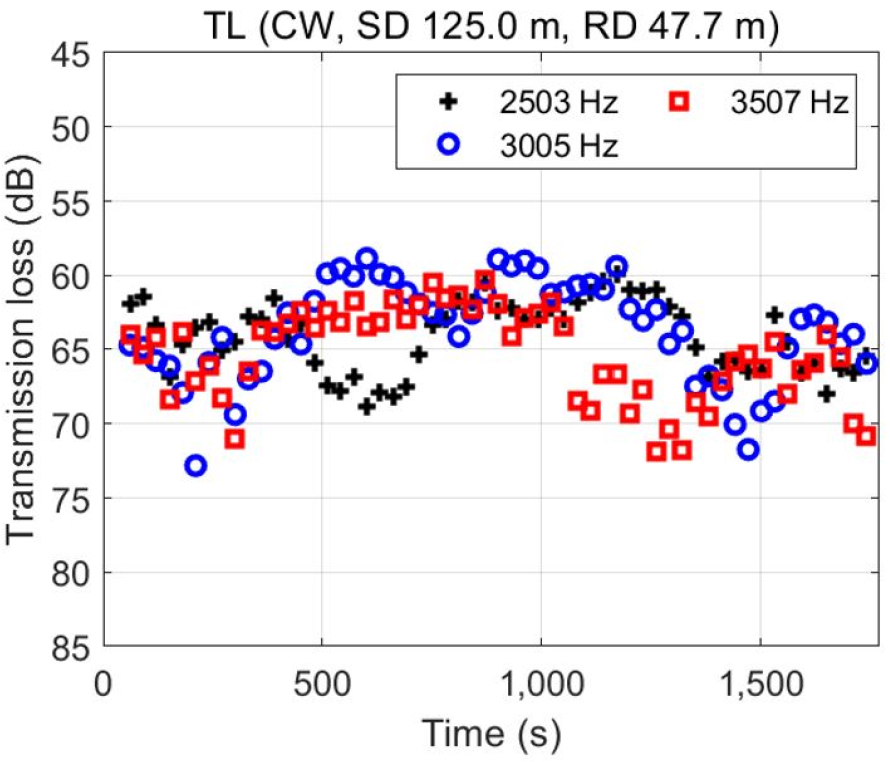
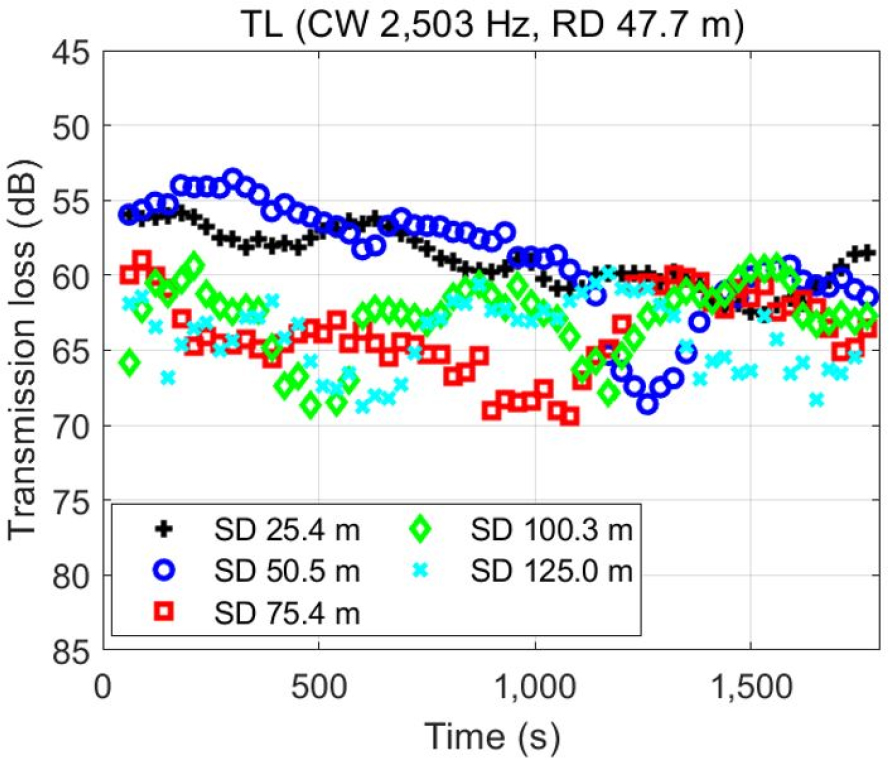
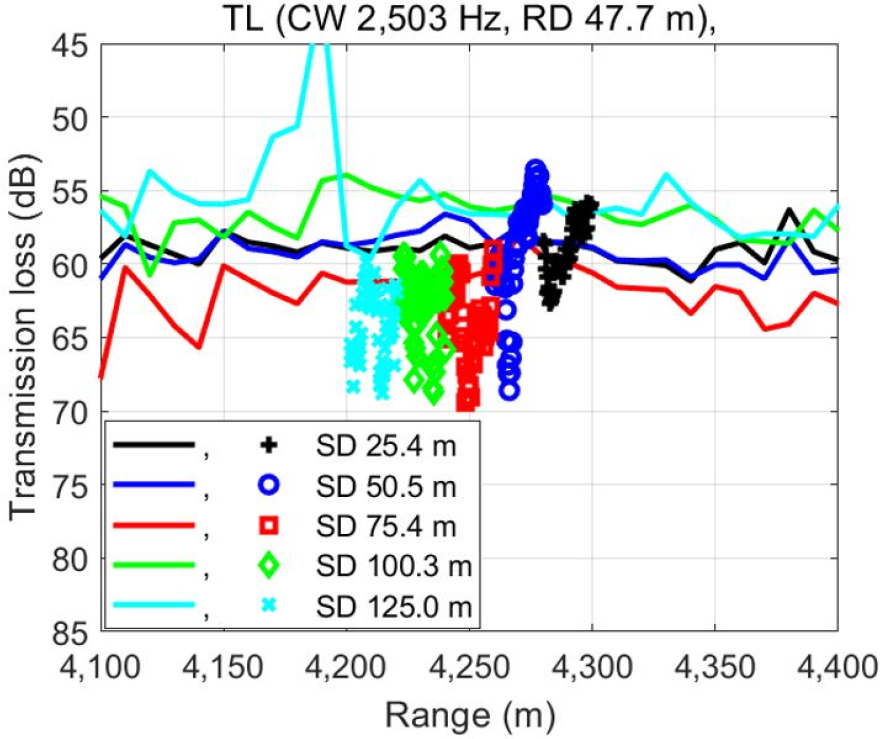
Fig. 8은 송신 펄스의 주파수가 2,503 Hz인 경우에 송신센서의 심도별로 나타낸 것이다. 1,800 s 동안 송신센서의 심도가 달라지면서 15 dB 내외의 변동이 보인다. 송신기 심도가 50 m인 경우는 수신기 심도와 유사하여 전달손실이 가장 낮고, 25 m인 경우에는 표층에 형성된 전달경로가 많아지는 환경이어서 전달손실이 낮다. 송신기의 심도가 100 m와 125 m인 경우에 전달손실이 높은 경향이 있다. 100 m의 송수신기 거리 변화만으로 큰폭의 전달손실의 변동이 나타나는 원인으로는 송수신기의 불안정이라고 보기는 어려우며 거리 변화에 따른 전달환경의 변화에 기인한다고 판단된다. 짧은 거리의 이동에 의한 음속구조의 변화는 무시할 수 있으므로 음파가 반사되는 경계면인 해빙의 상태에 기인할 가능성이 높다. 해빙 하부는 평평하지 않고 매우 거칠고 keel 등이 존재하는 등 비해빙 해역의 해표면과 차별되는 특성이 있다.[15,16,17]
측정한 전달손실을 Bellhop[18]으로 계산한 전달손실과 비교하여 Fig. 9와 같이 나타냈다. Bellhop으로 전달손실을 계산하기 위해 해빙의 두께는 2 m로 하고 해빙의 음향특성은 해수면과 동일하게 입력했다. 해빙의 음속은 대략 3,500 m/s로 높지만, 해빙의 영향을 포함한 측정 값과 해빙이 없는 경우의 차이를 비교하기 위해 해빙의 영향을 무시하고 모델링했다. 비교 결과인 Fig. 9처럼 심볼로 표시된 측정한 전달손실이 실선으로 표시된 모델링 값보다 더 높게 나타났다. 이러한 차이는 해빙의 반사계수 및 형상 등이 모델링에 반영되지 않아 발생할 수 있다고 판단된다.
3.2 수직선배열센서의 배열신호 빔형성
중거리에서 수신된 신호로부터 다중경로별 음파전달을 구분하기 위해 수직선배열센서에 수신된 배열신호를 빔형성 하였다. 단일주파수 펄스의 수신 신호는 펄스 길이 만큼 분할하고 중첩시키며 주파수 분석한 후 주파수영역에서 빔형성을 수행하였다. 선형주파수변조 펄스의 수신 신호는 빔조향 방향별 배열신호를 지연시키고 합을 구하는 시간영역 빔형성과 정합필터링을 수행하고 수신각을 분리하였다. 유한한 길이의 시간과 채널에 의한 안정성을 위해 채널과 시간별로 창함수를 적용하고 빔형성했다. 빔출력에서 빔각이 (-)이면 수평면 기준으로 해수면 방향에서 수신된 것을 의미한다.
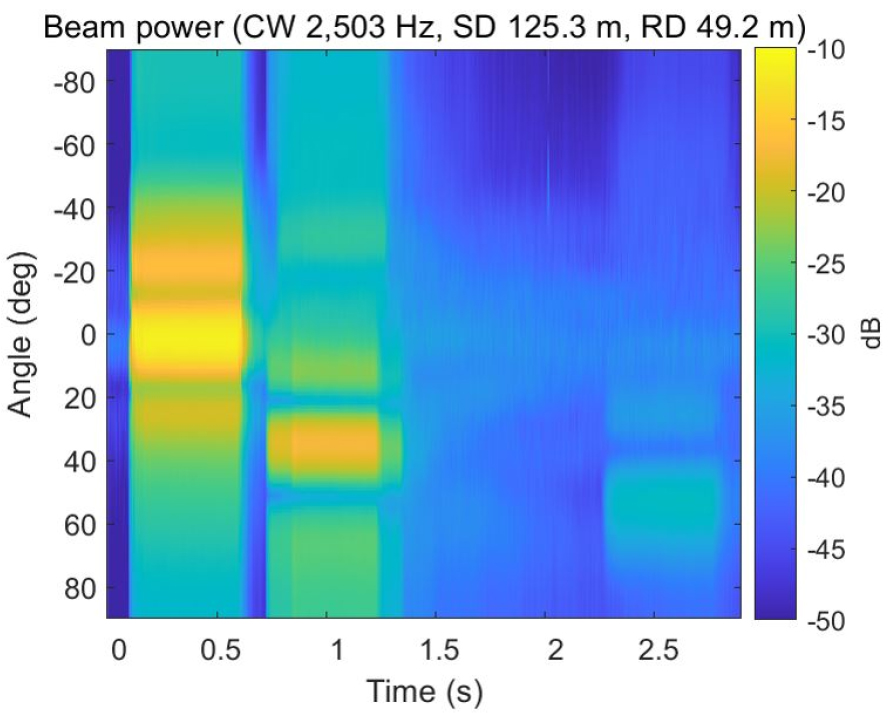
음파전달손실 측정에는 0.5 s 길이의 단일주파수 펄스 5개가 사용되었으며, 단일 주파수 펄스로 측정한 수신신호는 주파수영역에서 빔형성하고 절대값으로 환산하여 표시하였다. Fig. 10은 주파수가 2,503 Hz인 경우의 주파수영역 빔형성 결과이며 시간 축에서 세 개의 수신 영역을 확인 할 수 있다. 가장 먼저 도달한 0.1 s – 0.6 s 구간의 신호는 0 deg 근방에서 넓게 분포한다. 두 번째로 도달하는 0.7 s – 1.3 s 구간에서는 (+) 38 deg 주변에서 가장 강하게 보인다. 마지막으로 수신된 2.2 s – 2.8 s 구간에서는 (+) 57 deg 부근에서 신호가 나타난다. 빔출력의 도달시간 구간이 분리되어 나타난 원인은 음파전달 경로가 다르기 때문이며, 각 도달시간 구간에 여러 개의 유사한 도달경로 신호들이 약간의 시간차를 두고 중첩되어 있다. 각 도달 구간에서 빔각 축에서 가장 강한 빔출력 주변으로 약한 빔출력이 넓게 퍼져있고 짧은 시간 간격으로 중첩되어 나타나므로 시작점을 정밀하게 추정하기가 어렵다. 이것은 수직선배열의 길이가 짧아서 발생하는 넓은 주엽과 부엽의 영향으로 보인다. 따라서 주파수영역의 빔출력에서는 자세한 경로 구분이 까다로우므로 시간영역의 빔형성을 수행하였다.
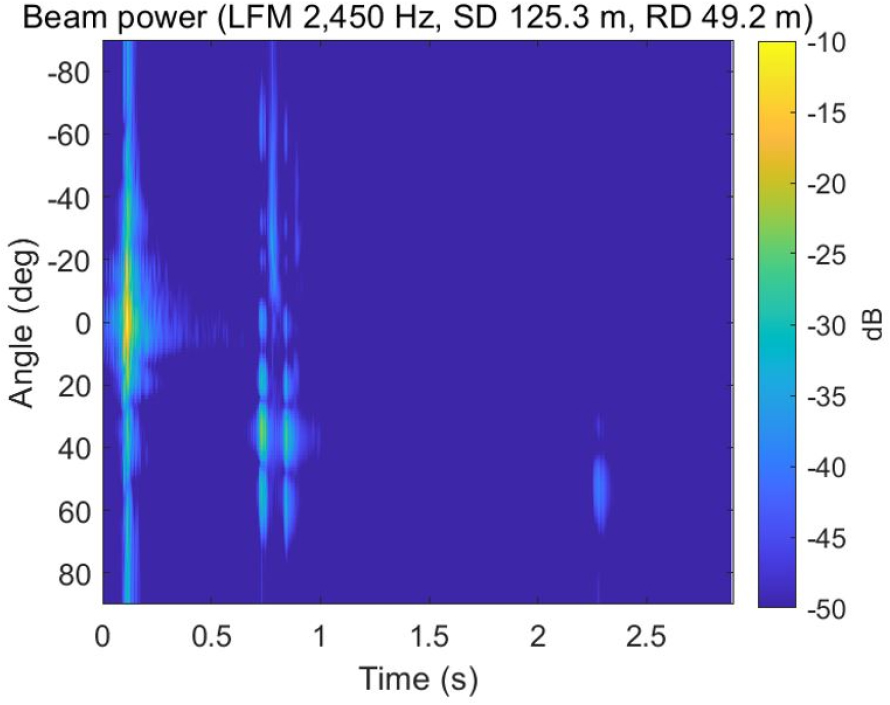
선형주파수변조 펄스의 수신신호를 시간영역에서 빔형성하고 정합필터링 후 포락선을 추정하였다. 순서를 바꾸어 정합필터링을 먼저 수행하고 포락선을 추정한 후에 시간영역에서 빔형성을 수행해도 결과는 같다. Fig. 11은 음원심도가 125.3 m인 경우의 시간영역 빔형성 출력이며 주파수영역 빔출력과 동일하게 3개의 도달구간으로 구분되어 나타나지만 시간과 빔각의 해상도가 상대적으로 높다. 첫 번째 도달구간의 신호는 약 0.1 s에서 가장 강하게 나타난다. 두 번째 구간에서는 해저면 방향에서 약 0.75 s 와 0.85 s에 신호가 분리되어 나타나고, 빔각에서도 여러 개의 신호가 구분되어 보인다. 세 번째 구간에서는 해저면 방향에서 2.3 s에 신호가 약하게 보인다. 해저면 방향에서 수신되는 구간에서는 송신기의 심도가 깊어지면 신호가 나타나는 시간이 빨라진다. 선형주파수변조 신호의 빔형성 결과에 나타난 신호의 특성을 파악하기 위해 Bellhop 으로 예측한 다중경로와 비교하였다.
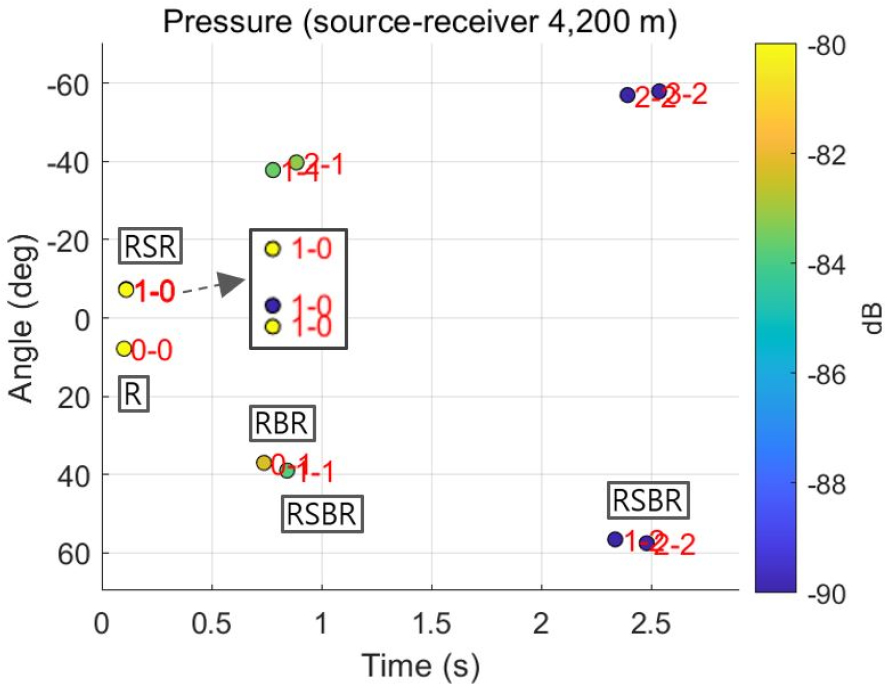
음원의 심도가 125 m인 경우에 음파전달 신호의 도달 경로와 도달각을 Bellhop 모델을 이용하여 추정하였다. 다양한 도달 경로를 보여주는 Fig. 12에서 반사가 없는 굴절 경로인 Refracted(R), 해수면(또는 해빙)을 1회 이상 반사한 경로인 Refracted Surface-Reflected(RSR), 해저면을 1회 반사한 경로인 Refracted Bottom-Reflected(RBR), 그리고 해수면과 해저면을 1회 이상 반사한 경로인 Refracted Surface and Bottom-Reflected(RSBR)를 볼 수 있다. Fig. 11과 같은 빔형성 결과와 비교하기 위해 모델링한 도달각을 Fig. 13에 나타냈다. 도달각을 원으로 표시하고 신호 세기를 색깔로 구분하여 해수면과 해저면의 반사 횟수를 함께 표시하였다. 앞의 숫자가 해수면 반사 회수이고 뒤의 숫자는 해저면 반사 횟수이다. 도달각의 특성을 시간영역에서 크게 세 개의 구간으로 나누어 볼 수 있으며, Fig. 11의 시작 시간과 일치시켜 나타낸 것이다. 가장 먼저 약 0.1 s에서 RSR이 우세하게 수신되고, R 경로도 분포한다. 두번째 구간에서는 약 0.7 s에는 RBR이 우세하고, RSBR 도 볼 수 있다. 마지막으로 약 2.3 s에서는 RSBR이 우세하고, 해수면 반사 횟수는 3번까지 나타났다. 이러한 도달 경로의 분포는 Fig. 11의 빔출력에서 볼 수 있는 것과 잘 일치한다. 모델링한 도달각을 기준으로 시간영역 빔형성에 나타난 신호를 분류하고 표층에 있는 해빙의 영향을 설명한다.
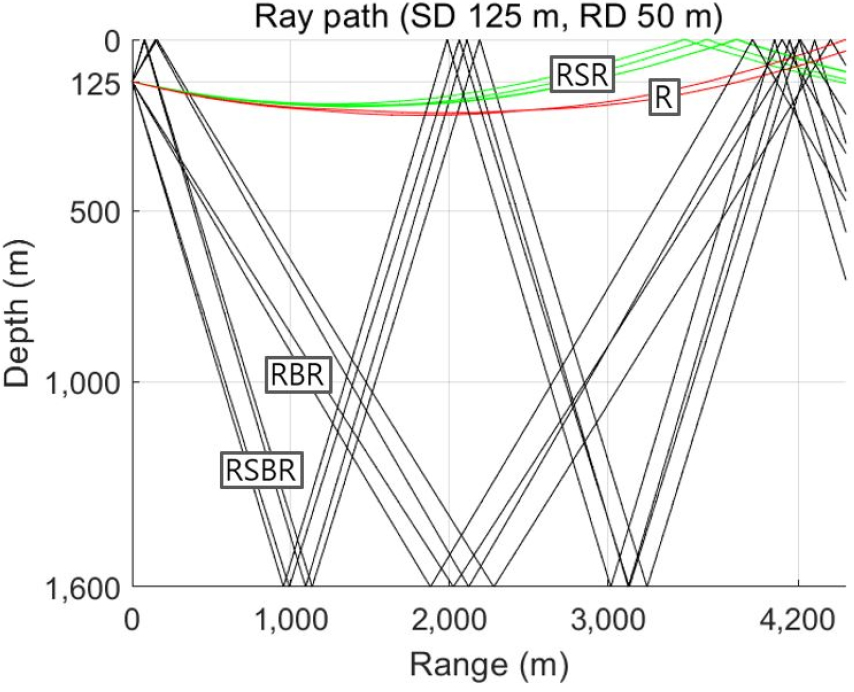
Fig. 12.
(Color available online) Modeled ray paths include red colored R (Refracted), green colored RSR (Refracted Surface-Reflected), black colred RBR (Refracted Bottom-Reflected), and black colored RSBR (Refracted Surface and Bottom-Reflected). Source depth is 125.3 m, and receiver depth is 49.2 m.
3.3 해빙에 의한 반사신호의 도달각 변동
실험이 진행되는 동안에 송수신기의 거리가 약 100 m 정도 이동했기 때문에 펄스를 반복하여 송수신할 때 매번 해빙의 반사 위치가 달라질 수 있다. 해빙에 반사되는 위치가 달라지면 거친 해빙 하부 반사면의 영향으로 해빙의 영향을 받는 경로의 도달각이 불안정할 수 있다.
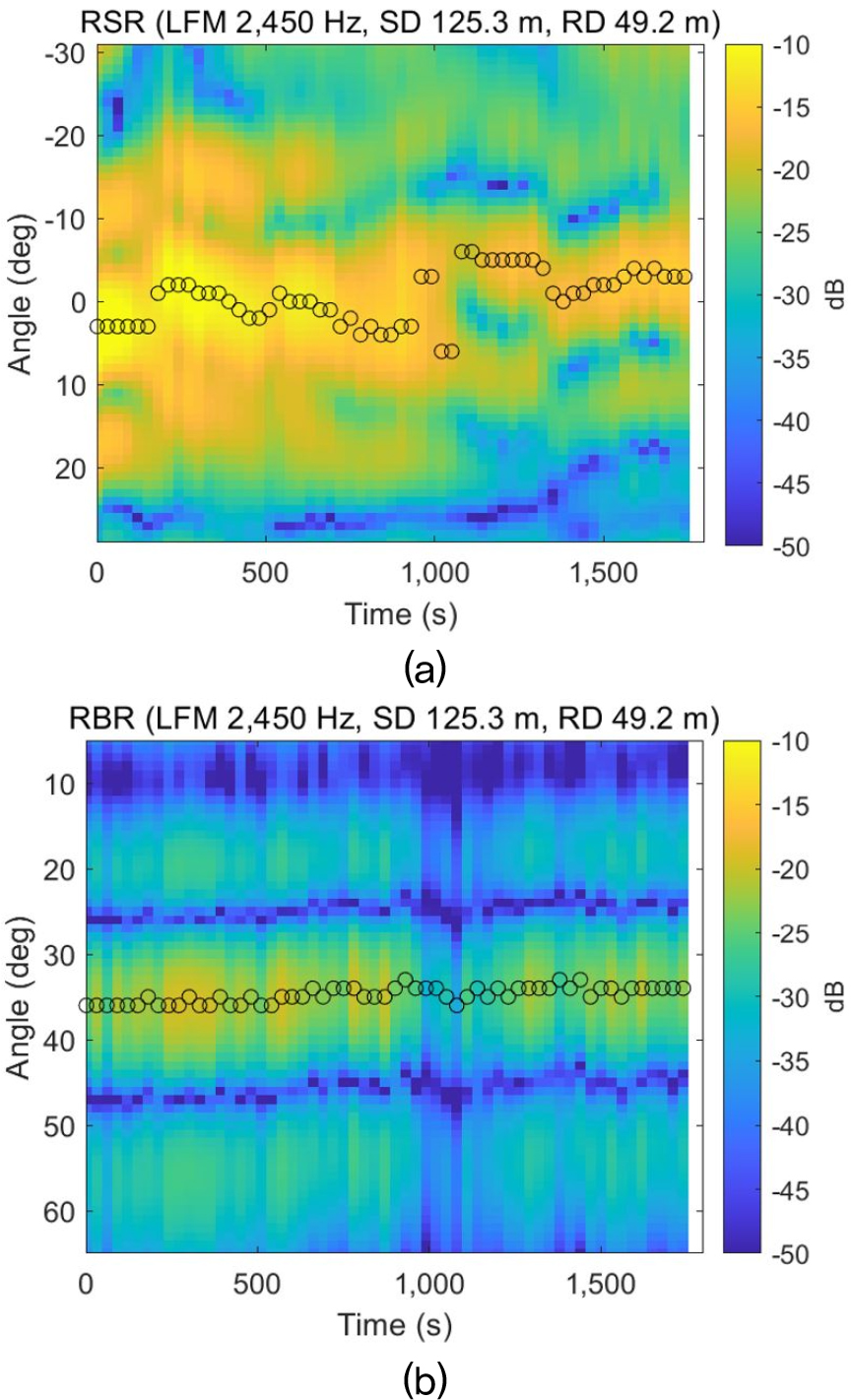
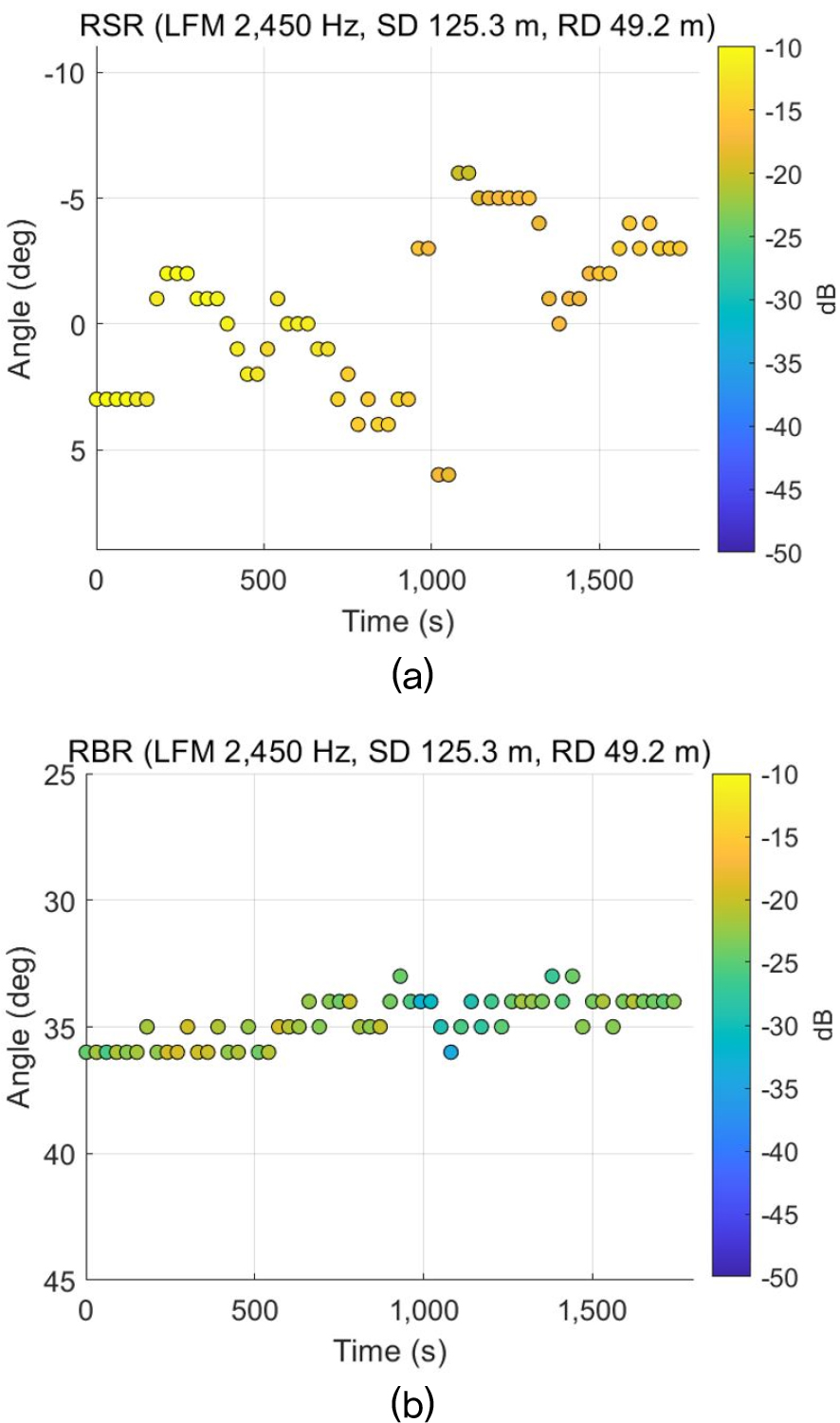
음파전달 신호를 측정하는 동안 수직선배열센서가 수직을 유지하였다면 도달각은 빔각과 같다고 할 수 있다. Fig. 11의 빔출력이 도달각 모델링 결과와 일치하는 것으로부터 수직선배열센서가 수직을 유지했다고 가정할 수 있다. 수직선배열센서가 완전하게 수직이 아니었다고 해도 동시에 관측된 RSR과 RBR 경로의 도달각의 변동을 상대적으로 비교하는 것은 가능하다. 빔출력에서 송신기의 심도가 125 m인 경우에 RSR과 RBR 경로의 도달각의 변화를 볼 수 있도록 펄스의 반복 시간에 따른 빔출력에서 두 구간을 강조하여 Fig. 14와 같이 나타냈다. 송신센서를 125 m에 두고 30 s 간격으로 59개 펄스(총 30 s × 59 = 1,770 s)를 반복 송신한 경우이므로 송수신기의 거리가 변하지 않는다면 수신신호의 변동은 무시할 수 있다. 그러나 RSR 경로인 Fig. 14(a)에서는 빔출력의 시간 변동이 큰 것을 볼 수 있다. 두 번째 구간인 RBR 경로의 경우인 Fig. 14(b)의 시간 변동은 상대적으로 안정적이다. RSR 경로와 같이 빔각과 시간 축에서 분리되지 않는 여러 개의 다중경로가 나타나는 경우에는 강한 경로의 성질이 빔출력에 우세하게 나타난 것으로 볼 수 있다. Fig. 15(a)는 RSR 경로의 우세한 빔각을 나타낸 것이며 59개의 펄스가 반복되는 동안 빔각의 변화 폭이 약 12 deg이고, Fig. 15(b)에 나타난 것처럼 RBR 경로에서의 빔각 변동 폭은 약 4 deg이다. 모든 음원의 심도에 대해 빔각의 변동의 표준편차를 계산하면 RSR이 1.3 deg ~ 3.4 deg이고 RBR은 0.7 deg ~ 1.1 deg이다. 즉, 해빙의 영향을 강하게 받은 RSR 경로의 빔각 변동 폭이 해빙의 영향을 약하게 받은 RBR 경로 보다 최대 2배 이상으로 나타났다. 빔각의 변동은 잡음과 같은 원인에 의한 무작위적인 형태와 반사면의 특이한 형상에 의한 무작위적이지 않고 경향성이 분명한 형태가 있을 수 있다.
구간별 빔각의 변동에 대하여 무작위성의 정도를 볼 수 있도록 Fig. 16과 같이 RSR과 RBR 경로의 펄스별 빔각과 시간축에서 이동 평균한 빔각의 차이를 계산하였다. 각 구간의 빔각 분포에서 Y 축에 해당하는 길이가 길면 변동의 범위가 넓으므로 무작위성이 크고, X 축의 길이가 길면 이동 평균한 빔각의 변동 범위가 넓으므로 기울기가 있는 무작위적이지 않은 특성이 강하다고 할 수 있다. Fig. 16에서 Y 축에 나타난 빔각 변동 폭은 RSR이 2 deg이고 RBR이 1.5 deg로써 서로 무작위성은 유사하다. X 축에 나타난 시간의 구간별 이동 평균한 빔각의 변동 폭은 RSR이 12 deg이고 RBR 이 4 deg로써 RSR 경로의 변동 폭이 훨씬 크다. 이러한 결과를 정리하면, RSR 경로는 송수신 거리가 변하면서 해빙 하부면의 거칠기의 영향을 받아 빔각의 평균값이 시간에 따라 기울기를 갖는 것으로 판단된다. 또한, SRS 경로와 거의 동시에 수신된 안정적인 R 경로의 간섭이 일부 있을 수 있다고 판단된다. 음원심도별 X 축과 Y축의 변동 폭을 정리하면 Table 1과 같고, X 축의 폭은 모든 음원심도에서 RSR이 RBR보다 2배 이상이고 Y축의 폭은 서로 비슷하다.
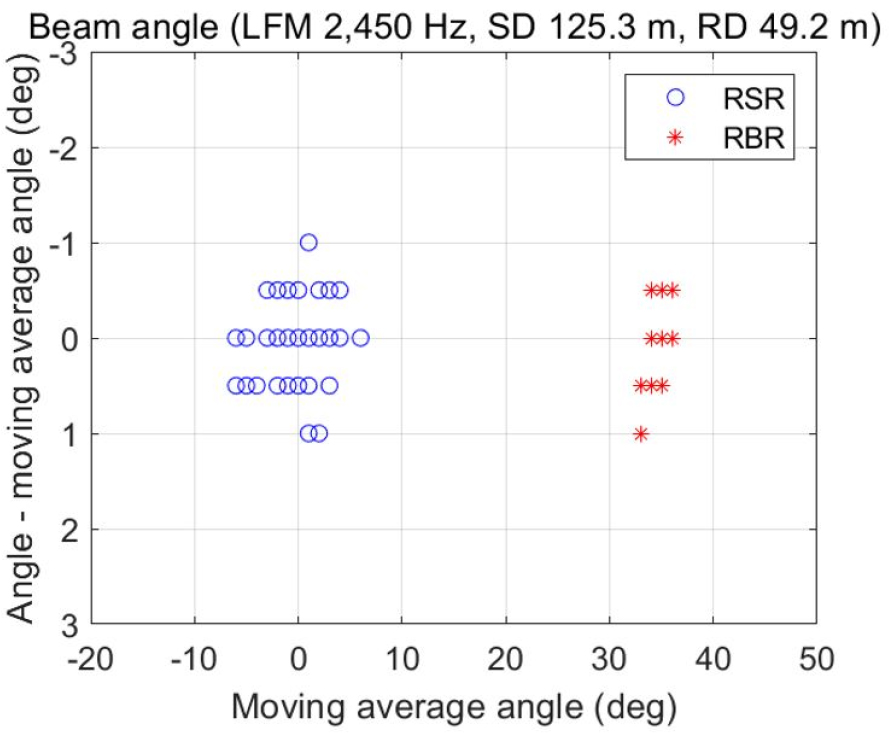
Table 1.
Distribution distance of angle fluctuation of RSR path and RBR path over each source depth.
IV. 결 론
북극해에서 해빙의 영향에 의한 음파전달 특성을 파악하기 위하여 직접 현장 실험을 수행하였다. KAMAS-24에서는 2024년 8월에 북극해의 축치해와 동시베리아해 해역에서 해빙 해역의 중거리 음파전달손실을 측정하였다. 음파전달손실 측정은 유빙 형태의 해빙 위에서 수행하였다. 이번 논문에는 KAMAS-24 실험 중에서 수직선배열센서를 이용하여 측정한 음파전달손실을 분석하고 빔각의 변동을 분석하였다.
음파전달손실을 계산하고 빔형성과 모델링으로부터 도달경로의 특성을 파악하였다. 도달시간 순으로 RSR, SBR, RSBR이 나타났고, 실험이 수행되는 동안 유빙이 표류하여 송수신기의 거리가 약 100 m 정도 이동하면서 전달손실의 크기와 빔각으로 표현되는 도달각의 변동이 나타났다. 짧은 송수신기의 거리 변화만으로 전달손실의 변동이 나타나는 원인으로는 해빙 하부의 거칠기와 형상 등의 전달환경 변화라고 추정할 수 있다. 빔각의 변동은 해빙의 영향을 지배적으로 받은 RSR 경로에서 크고 해빙의 영향을 약하게 받은 RBR 경로에서는 비교적 작게 나타났다. 빔각 변동의 무작위성은 가장 먼저 도달하는 도달구간인 RSR 경로가 무작위적이지 않은 특성을 보이고, RBR 경로는 비교적 무작위적인 변동에 가까운 형태로 판단된다. 해빙 보다 해저면의 영향을 크게 받은 SBR 구간은 송수신기의 거리 이동에 따른 해저면의 변화가 작아서 빔각의 변동이 작았을 것으로 판단된다. 반면, 해빙의 영향이 지배적인 RSR 경로의 빔각 변동에는 거의 동시에 수신된 R 경로의 간섭도 일부 있을 것으로 추정되지만 대부분의 심도에서 RBR 경로보다 크다. KAMAS-24와 같이 송수신 거리의 변화가 짧고 중거리에서 전달된 경우에는 해빙 하부의 형상 영향으로 무작위성이 약한 특성이 강조되어 나타나는 것으로 판단된다. 하지만 해빙 하부 형상과 빔각의 변동성에 대한 연관성의 규명에는 한계가 있었다. KAMAS-24에서는 해빙 하부의 형상을 직접 관측하지 못했기 때문이다.
2025년 8월에 동일한 해역에서 수행될 예정인 KAMAS-25에서는 전달손실 측정과 동시에 해빙 하부의 형상을 관측하여 빔각의 변동의 원인을 직접 분석할 예정이다. 또한 진행 중인 해빙 경계면에 의한 음파전달 모델링이 완성되면 실측값과 비교하며 해빙의 영향을 분석할 예정이다.
