

I. 서 론
최근 군사 및 민간 분야에서 다양한 수중 음파 탐지기 기술이 개발되고 있다. 일반적으로 군사 목적으로 사용되는 수중 음파 탐지 기는 잠수함, 어뢰, 기뢰 등의 탐지 및 식별 등을 위해 주로 사용되며, 민간 분야에서는 주로 어군 탐지, 수중 탐사 등 해양환경 조사를 목적으로 주로 사용되고 있다.[1]
이러한 수중 음파 탐지기는 크게 능동 소나 및 수동 소나시스템으로 분류가 가능하며 능동 소나 시스템은 특정 위치에 설치된 송신 트랜스듀서에서 핑 신호를 송신하고, 일정거리에 떨어져있는 잠수함 및 기뢰, 수중부유물과 같은 수중 표적에 의해 반사되어 오는 반사음을 탐지하는 장비이다.[1, 2] 이에 반해, 수동 소나 시스템의 경우에는 특정 수심에 설치된 하이드로폰을 이용해 수상함 및 잠수함의 엔진이나 프로펠러와 같은 기계류에서 발생하는 자체 소음을 탐지하는 장비이다.[1, 2]
소나 시스템을 설계하고 운용하는데 있어서 운용 주파수 대역 및 센서 채널 수의 결정과 함께 선형, 원형, 원통형, 평면형 등과 같은 센서 배열 형태의 선택 및 높은 감도를 갖는 수중 음향 센서를 사용하는 것이 중요하다.[2, 3] 현재까지 압전센서, 광섬유 센서, 벡터 센서 등 다양한 종류의 수중 음향 센서가 개발되고 있으나,[4] 실제 응용분야에서는 비용 및 효율 측면에서 효과적인 압전센서가 주로 사용되고 있다.
이와 같이 수십 개의 센서로 구성된 배열형태의 소나 시스템을 운용하는데 있어서, 센서에 대한 물리적, 전기적 충격에 의해 음향센서에 고장 및 결함이 발생할 수 있는데, 센서 고장에 따른 신호 손실 및 결함에 따른 잡음의 유입으로 인해 시스템의 성능 저하를 야기한다.[2, 3]
센서의 불량형태는 주로 고장과 결함으로 나눌 수 있다.[5] 센서 고장이 발생한 경우 센서로부터 수신되는 신호가 없지만, 센서 결함이 발생한 경우 센서로부터 잘못된 신호가 지속적으로 수신된다. 이러한 이유로, 센서 결함에 대한 탐지가 고장 탐지 보다 더 어렵다.[5]
일반적인 소나 시스템에서는 동시에 입력되는 다채널의 센서신호들을 이용해 잡음대성능비를 개선하고 음원도래방향을 예측하는 일련의 과정을 수행하는 어레이 신호처리, 즉 빔형성 기법을 통해 탐지결과를 전시한다.[6] 이러한 수동 소나 시스템에서, 실제 센서로 입력되는 원시 센서 신호를 모니터링 하지 않는 이상 소수 채널의 고장 또는 결함은 실제 운용자가 시각적으로 식별하기가 어렵다. 특히 결함 센서는 동작을 멈추지 않고 특정 상수 값의 형태가 아닌 정상 신호와 유사한 신호를 지속적으로 발생시키기 때문에 결함에 대한 판단을 더욱 어렵게 만든다.[7]
따라서 센서 결함을 자동으로 탐지하여, 탐지 성능의 저하를 최소화 하고 이상 신호 발생에 따른 오탐지 확률을 최소화하기 위한 결함 센서에 대한 처리가 필요하다.[8]
본 논문에서는 수동 선배열 소나 시스템을 운용하는 데 있어서 필요한 센서의 결함 유무를 판별할 수 있는 센서 결함 탐지 기법을 제안하였다. 제안된 기법은 센서를 통해 입력되는 각 채널별 음향 신호의 실효치를 측정한 뒤, 문턱값 분석 방식을 통하여 결함 발생 여부를 1차로 판단하고, 실효치교차율을 분석하여 2차 판단하는 방식을 사용하였다. 또한 결함으로 판별된 센서에 대하여 탐지 성능 감쇠를 최소화 하기위한 결함 처리 기법을 비교 분석하였다.
본 논문의 구성은 다음과 같다. II장에서는 제안된 센서 결함 탐지 기법에 대해 설명하고, III장에서는 결함 처리 기법을 설명한다. IV장에서는 제안된 기법에 대한 성능을 평가하였으며, V장에서 결론을 맺는다.
II. 제안된 결함 탐지 기법
일반적인 수동 소나 시스템에서 음향센서의 고장 및 결함의 원인은 실제 단일 음향센서 모듈의 고장 또는 다수의 음향 센서에 전원을 공급하거나 센서 신호에 대한 아날로그에서 디지털변환 등을 수행하는 멀티플렉서의 고장으로 인해 센서신호가 정상적으로 수신되지 않는 문제가 주원인이며, 음향 센서에 결함이 발생한 경우 Fig. 1(a)와 같이 결함이 발생한 음향 센서 채널(결함발생 센서 채널: 8, 10)에 대하여 인접채널과 상이한 센서신호가 수신됨을 관찰할 수 있다. Fig. 1(a)에 해당하는 센서신호에 대하여 실효치 값을 계산한 결과는 Fig. 2와 같다. 수신되는 센서신호에 대한 실효치 역시 Fig. 1(a)와 마찬가지로 Fig. 2(a)와 같이 결함이 발생한 음향 센서 채널에 대하여 인접채널과 상이한 실효치 값을 나타낸다. 즉, 결함 센서 신호의 경우 다른 정상 채널 신호에 비해 상대적으로 매우 크거나 작은 실효치 값을 보인다, 이는 결함이 발생한 센서 채널의 신호의 경우 신호 형태는 정상 센서와 유사한 형태를 보이지만 특정 값으로 편향되어 있기 때문이다. 그 뿐만 아니라, 센서부에 전원이 적절히 공급되지 않는 경우 해당 센서에서는 특정 값을 갖는 직류 신호를 출력하기도 한다. 따라서 기존의 센서 결함 진단은 Fig. 2(a)와 같은 센서에 입력되는 신호의 실효치를 각 채널별로 측정해서 운용화면에 전시하고, Fig. 2(a)와 같이 인접채널과의 실효치 차이가 가시적으로 발생하는 경우 운용자가 주관적으로 센서 불량여부를 수동 판단하는 개념이 주로 적용되고 있다.[9]
Fig. 2.
Illustration of RMS values according to different sensor channels when average RMS is (a)-18.6 dB(normal) and (b)-9.7 dB(noisy).
하지만 Fig. 1(b)과 Fig. 2(b)와 같이 음향 센서에 대한 수신 이득을 높이거나, 주변 해양소음의 증가(해상 교통량 증가, 파도 및 강우 등)로 인해 인접센서에 수신되는 음향 신호의 크기가 증가하여 결함 센서에서 출력되는 신호의 크기와 유사해 지는 경우, 운용자가 센서 결함 발생 유무를 판단하기 어려울 뿐만 아니라, 단일 음향 센서에 결함이 발생한 경우에는 멀티플렉서가 고장인 경우에 비해 정상유무 판단이 어렵게 된다.
따라서 이러한 센서 결함에 대한 판단의 자동화 및 결함 진단 정확성을 높이기 위하여 Fig. 3과 같은 결함 탐지 기법을 제안하였다. 제안된 기법은 Fig. 3과 같이 2단계로 구성되며 채널 별 실효치 값에 대한 문턱치 초과여부 분석을 통해 1차 판단을 수행하고, 2차적으로 전체 센서에 대해 입력신호의 실효치교차율을 측정 및 분석하여 최종 결함 판단을 수행한다. 상세 수행 과정은 다음과 같다.
먼저 입력되는 전체  개의 센서신호에 대하여 다음과 같이 실효치를 계산한다. n은 프레임번호,
개의 센서신호에 대하여 다음과 같이 실효치를 계산한다. n은 프레임번호,  는 센서번호를 각각 의미한다.
는 센서번호를 각각 의미한다.
 , (1)
, (1)
 ,
,
각 프레임별 실효치를 계산하고,  주기(
주기( = 8)로 선형적분을 수행한다. 계산된 실효치를 이용하여 인접 채널과의 비교 수행을 통해 실효치차가 1차 결함판단 문턱치
= 8)로 선형적분을 수행한다. 계산된 실효치를 이용하여 인접 채널과의 비교 수행을 통해 실효치차가 1차 결함판단 문턱치  보다 작거나
보다 작거나  큰 경우 센서를 결함으로 판별한다. 1차 결함판단 문턱치
큰 경우 센서를 결함으로 판별한다. 1차 결함판단 문턱치  는 전체 음향 채널 신호 평균 실효치,
는 전체 음향 채널 신호 평균 실효치,  에 대한 표준편차(
에 대한 표준편차( )를 이용하여 통계적으로 결정(
)를 이용하여 통계적으로 결정(
 )하였다.
)하였다.
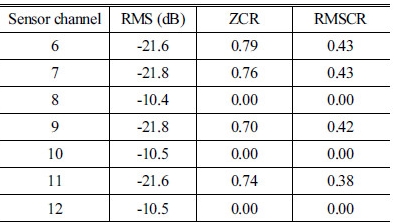
결함판단 2단계에서는 신호의 변화 정도를 측정하여 결함여부를 판별한다. 결함 센서 입력신호의 경우 정상신호와 유사하지만 특정 값만큼 편향되어 있거나, 전원이 정상적으로 인가되지 않는 경우 DC 와 유사한 값으로 입력되기 때문에 신호의 변화율을 결함 탐지의 방법으로 고려하였다. 신호의 변화 정도를 측정하는 척도로써 영교차율(Zero Crossing-Rate, ZCR)[10]이 사용 가능한데 결함 센서의 입력신호의 경우 Eq. (2)를 이용해서 Fig. 1에 사용된 신호의 영교차율을 측정하였을 때 Table 1과 같이 정상신호에 비해 낮은 영교차율 값을 보인다.
 , (2)
, (2)
 , (3)
, (3)
여기서  는 센서번호를 의미하고,
는 센서번호를 의미하고,  는 부호함수를 의미한다.
는 부호함수를 의미한다.
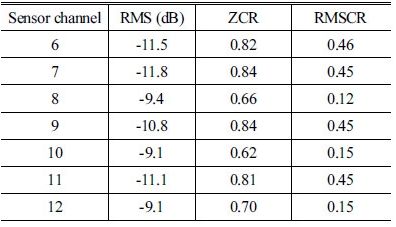
영교차율 분석을 통해 직류 형태로 수신되는 센서 채널에 대하여 결함 판별이 가능하고(ZCR = 0), Fig. 1과 같이 결함 센서의 수신 신호 전체가 특정 값으로 편향되어 있는 경우 영교차율 분석을 통해 결함 판별이 가능하다. 하지만 해양소음이 증가하는 경우 입력되는 신호의 분산이 커지게 되고 영교차율 역시 증가함에 따라 Table 2(Fig. 2에 사용된 신호)와 같이 결함 센서와 정상 센서의 영교차율 차이가 감소하게 된다. 따라서 영교차율을 결함진단의 척도로 사용하는 경우, 일부 결함 채널에 대한 검출이 어려움에 따라 본 논문에서는 위와 같은 현상에 기인하여 실효치교차율을 측정하고 이 값을 센서 결함여부 판별을 위한 척도로 사용하였다. 실효치교차율은 Eq. (4)와 같이 계산할 수 있다.
 , (4)
, (4)
 , (5)
, (5)
여기서  는 센서번호를 의미하고,
는 센서번호를 의미하고,  는
는  번째 센서신호의 실효치 값을 의미한다.
번째 센서신호의 실효치 값을 의미한다.
결함 센서에 대해 측정된 실효치 교차율은 Table 1과 2와 같다. Table 2에서 볼 수 있듯이 해양소음이 증가하는 경우에 결함 센서의 영교차율이 급격히 증가함에 따라 정상 센서의 평균 영교차율과 결함 센서 신호의 영교차율 차이가 감소하는 반면, 실효치교차율은 결함 센서 신호의 실효치교차율 증가폭이 적음을 확인할 수 있다.
계산된 실효치교차율에 대하여 자동 결함 판별을 위해 Eqs. (6)과 (7)을 이용하여 평균 영교차율 대 채널 별 영교차율비( ) 및 평균 실효치교차율 대 채널 별 실효치교차율비(
) 및 평균 실효치교차율 대 채널 별 실효치교차율비( )를 계산한다.
)를 계산한다.
 , (6)
, (6)
 , (7)
, (7)
여기서  은 전체 채널 평균 영교
은 전체 채널 평균 영교
차율,  는
는  번째 음향 채널 신호의 영교차율을
번째 음향 채널 신호의 영교차율을
의미하고,  는 전체 채널 평
는 전체 채널 평
균 실효치교차율,  는
는  번째 음향 채널 신호의 실효치교차율을 각각 의미한다.
번째 음향 채널 신호의 실효치교차율을 각각 의미한다.
Eq. (7)을 통해 계산된  이 2차 결함탐지 문턱치
이 2차 결함탐지 문턱치 보다 작거나,
보다 작거나,  보다 큰 경우 센서를 최종 결함으로 판단한다. 2차 결함탐지 문턱치
보다 큰 경우 센서를 최종 결함으로 판단한다. 2차 결함탐지 문턱치  는 결함 센서가 없는 센서배열의 경우
는 결함 센서가 없는 센서배열의 경우  에 대한 표준편차가 매우 작아지기 때문에 정상채널에 대한 오판별이 발생할 수 있어, 1차 결함탐지 문턱치(
에 대한 표준편차가 매우 작아지기 때문에 정상채널에 대한 오판별이 발생할 수 있어, 1차 결함탐지 문턱치( )와는 달리 고정값을 이용한다. 2차 결함탐지 문턱치를 결정하는
)와는 달리 고정값을 이용한다. 2차 결함탐지 문턱치를 결정하는  는 본 연구를 위해서 변경이 가능한 파라미터로 설정하였으며, 수 번의 시행을 통해 산출된 최적의 값을 선택하였다.
는 본 연구를 위해서 변경이 가능한 파라미터로 설정하였으며, 수 번의 시행을 통해 산출된 최적의 값을 선택하였다.
Fig. 4(a)와 같이 주변소음이 작은 경우, 영교차율을 사용하는 경우와 실효치교차율을 사용하는 경우의 성능 차이가 거의 없지만, Fig. 4(b)와 같이 주변소음이 증가한 경우, 영교차율을 사용하는 경우와 실효치교차율을 사용하는 경우에  및
및  에서 차이가 발생함을 확인할 수 있다.
에서 차이가 발생함을 확인할 수 있다.
 and
and  at T = 2, M = 80, and average RMS is (a) -21.2 dB and (b) -12. 8dB.
at T = 2, M = 80, and average RMS is (a) -21.2 dB and (b) -12. 8dB.III. 센서 결함처리 기법 비교
본 장에서는 결함 판별된 음향 센서로 인한 탐지 성능의 저하를 최소화 하고, 이상 신호 발생에 따른 오탐지 확률을 최소화하기 위한 센서 결함처리 기법을 소개한다. 탐지처리를 위해서는 센서에 입력되는 높은 주변소음에 대한 신호대잡음비 성능을 개선하기 위한 빔형성 과정이 선행되는데, 신호처리에 사용되는 센서 수에 따라 신호대잡음비 성능이 영향을 받는다. 함정이나 잠수함 등에 설치되는 이동형 음향 센서 배열의 경우 결함 또는 고장이 발생한 음향 센서에 대하여 새로운 음향 센서로 교체가 가능하지만, 주로 해저면 등에 포설 또는 매설되어 운용되는 고정형 센서 배열의 경우 음향 센서의 교체가 쉽지 않기 때문에 본 장에서 설명하는 센서 결함 처리를 수행하여 빔형성을 수행해야 한다.
본 논문에서 비교 분석을 수행한 결함 처리 기법은 다음과 같다.
첫 번째는 결함이 발생한 센서 채널 신호를 0으로 설정하는 방법이다.
 , (8)
, (8)
여기서  는 결함이 발생한 센서번호를 의미한다. 고장 또는 결함이 발생한 센서 채널 신호를 0으로 설정함으로써 잡음 유입을 차단함과 동시에 실제 빔형성을 수행하는데 해당 채널의 영향을 배제하는 효과를 얻을 수 있다. 하지만 결함 채널의 수에 해당하는 만큼 지향지수가 감쇠하게 된다.
는 결함이 발생한 센서번호를 의미한다. 고장 또는 결함이 발생한 센서 채널 신호를 0으로 설정함으로써 잡음 유입을 차단함과 동시에 실제 빔형성을 수행하는데 해당 채널의 영향을 배제하는 효과를 얻을 수 있다. 하지만 결함 채널의 수에 해당하는 만큼 지향지수가 감쇠하게 된다.
두 번째는 결함이 발생한 센서 채널에 대하여 인접채널 신호를 이용하여 보간하는 방법이다. 보간식은 Eq. (9)와 같다.
 , (9)
, (9)
Eq. (9)와 같이 결함이 발생한 센서의 인접 센서 신호를 합성하여 결함이 발생한 센서에 해당하는 신호를 생성하고, 새로 합성한 신호의 전력의 크기를 유지하기 위하여  로 합성 신호를 나눈다. 신호 보간을 통해 실제 센서신호와 유사한 센서를 생성할 수 있지만 각 센서에 신호가 도달하는 지연값, 즉 위상차를 이용하는 빔형성에서 위와 같은 보간 기법을 사용하는 경우 지연 합을 수행 할 신호의 위상정보에 오류가 발생할 수 있기 때문에 탐지 결과가 미세하게 왜곡되는 문제가 발생할 수 있다.
로 합성 신호를 나눈다. 신호 보간을 통해 실제 센서신호와 유사한 센서를 생성할 수 있지만 각 센서에 신호가 도달하는 지연값, 즉 위상차를 이용하는 빔형성에서 위와 같은 보간 기법을 사용하는 경우 지연 합을 수행 할 신호의 위상정보에 오류가 발생할 수 있기 때문에 탐지 결과가 미세하게 왜곡되는 문제가 발생할 수 있다.
IV. 성능평가
제안된 결함 탐지 기법의 성능평가를 위하여 다수의 특정 해역에 실제 설치되어 운용 중인 수중 음향 센서 배열에 대하여 제안된 기법을 적용하여 결함 진단 성공률을 측정하였다.
결함 탐지 기법의 시험을 위해 다수의 배경소음 환경에서 각각의 적분주기에 대해 영교차율기반 및 실효치교차율기반 탐지 기법의 진단 성공률을 비교하였다. 시험을 위하여 실제 소나 시스템에서 운용중인 3개 배열 총 240개 음향 센서로부터 획득한 신호를 사용하였으며, 시험에 사용된 배열의 센서 구성은 Table 3과 같다. 채널에 대해 결함 진단 성공률을 측정 결과는 Table 4와 같다. Table 4에서 볼 수 있듯이 제안된 기법을 이용하는 경우 매우 높은 진단 성공률을 보였으며, 단, 낮은 적분시간을 적용하는 경우 영교차율 기반의 탐지 기법이 실효치교차율 기반 탐지기법에 비해 진단 성공률이 감소함을 보였다. 이는 낮은 적분시간에서는 신호의 변화량이 크고 이에 따라 영교차율이 증가하여 결과적으로  가 감소되었기 때문이다.
가 감소되었기 때문이다.
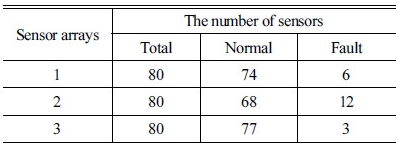
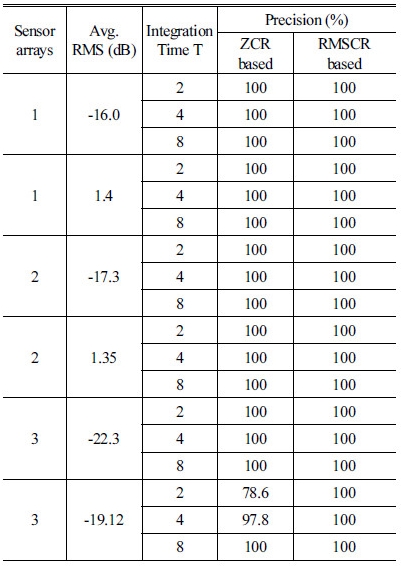
Fig. 5.
The narrowband LOFAR grams corresponding to (a)low frequency band and (b)high frequency band.
부가적으로 센서 결함처리에 대한 전후 성능 비교 시험을 수행하였다. 탐지에 사용되는 총 음향 센서 채널 수는 80개 채널이고, 결함 채널 수는 12채널이다. (1)결함처리 미수행, (2)0으로 설정, (3)보간처리에 대한 협대역 탐지 및 광대역 탐지 결과 비교를 수행하였으며 각 비교 결과는 Fig. 5 및 6과 같다. Fig. 5 및 6의 탐지결과화면은 주파수 스펙트럼 및 방위 에너지 값에 대하여 0~255의 컬러로 양자화된 폭포수 형태 전시 방식의 그램화면이며, 여기서 x축은 주파수(Fig. 5) 및 방위(Fig. 6)를 의미하고 y축은 시간을 의미한다.
Fig. 5에서 볼 수 있듯이 LOFAR(LOw Frequency Analysis and Recording)[2, 11] 탐지 결과를 전시하는 협대역탐지 화면에서 결함채널 신호에 의한 잡음이 발생함(점선 박스 표시)을 확인할 수 있다. Fig. 6의 광대역탐지 결과[2,11]에서도 결함처리 수행 결과에 비해 결함처리 미수행 시 광대역 탐지 성능의 저하를 관찰하였다. 저주파대역에 대한 광대역탐지 결과의 경우 결함처리 미수행 결과(1) 화면에서 표적의 이동과 무관한 광대역 탐지 결과(점선 박스 표시)가 관찰되며, 고주파 대역에 대한 광대역 분석 결과 시 결함처리 미수행 결과(1)에서는 일부 표적이 탐지 되지 않고, 0으로 설정 처리 결과(2)에서는 표적이 탐지, 보간처리 결과(3)에서는 표적이 탐지 되지만 표적의 이동 항적에 일부 왜곡이 발생(점선 박스 표시)하는 것으로 관찰되었다.
V. 결 론
본 논문에서는 수동 소나 시스템을 위한 수중 음향 센서 결함 탐지 기법을 제안하였다. 제안된 기법은 기존에 주로 사용되는 센서 입력 신호의 실효치 값에 대한 분석을 통해 1차 결함 탐지를 수행하고, 실효치교차율 분석을 통해 2차 결함 탐지를 수행하였다. 제안된 기법의 성능분석을 위하여 실제 설치되어 운용중인 센서 배열을 통해 획득된 신호를 이용하여 결함 탐지 성능 실험을 수행하였으며, 실험결과를 통해 제안된 기법이 높은 결함 탐지 정확도를 보임을 관찰하였다. 또한 센서 결함 처리 기법 비교를 수행하였으며, 결함처리를 수행하지 않는 경우 심한 신호 왜곡이 발생하고, 결함처리 기법을 적용한 경우 미처리 결과에 비해 탐지 성능이 향상됨을 확인하였다. 향후 결함 채널에 대한 신호 지연 성분 및 전달경로를 고려한 센서 신호 생성 기법 연구가 필요할 것으로 예상된다.
본 논문을 통해 제안된 기법은 향후 수중 음향 센서뿐만 아니라, 다양한 종류의 센서들을 위한 자동 결함 탐지 기법으로 활용 할 수 있을 것으로 기대된다.
