

I. 서 론
II. 수중 음향 트랜스듀서 특성 분석
2.1 임피던스 주파수 특성 분석
2.2 전기적 등가회로 모델링
III. 소나 송신기 설계
3.1 설계 사양
3.2 토폴로지 선정
3.3 풀브릿지 인버터
3.4 정합회로
3.5 LC 필터
IV. 소나 송신기 제어 기법
V. 시뮬레이션
VI. 실험 및 결과 분석
VII. 결 론
I. 서 론
수중에서 운용하는 능동 소나 시스템은 수중표적의 방위 및 거리를 탐지하는 장비로써, 자체적으로 음파를 발생시키는 송신부와 표적에서 반사되어 되돌아오는 신호를 수신하는 수신부로 나뉜다. 일반적으로 송신부는 전력을 증폭하는 송신기와 증폭된 전기신호를 음향신호로 변환하는 수중 음향 트랜스듀서로 구성된다. 탐지 거리를 넓히고, 다양한 수중표적을 효과적으로 탐지하기 위해서는 트랜스듀서로 전송되는 송신기의 출력 전력을 증가시키고, 트랜스듀서에서 발생하는 음향신호가 일정한 크기의 광대역 특성을 가지는 것이 중요하다. 이에 따라 최근 고출력, 고효율의 능동 소나 시스템에 관한 연구가 활발히 이루어지고 있다.[1,2,3,4]
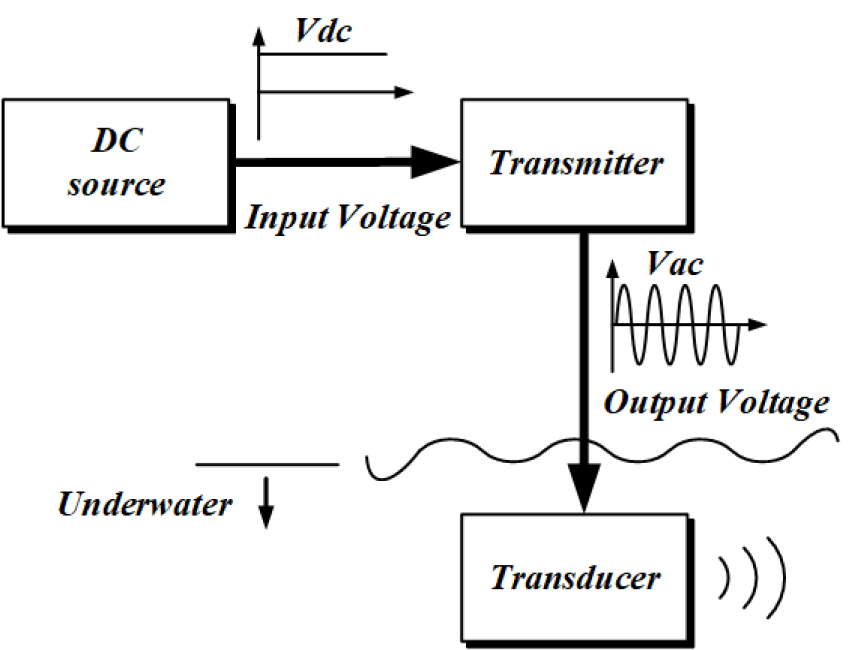
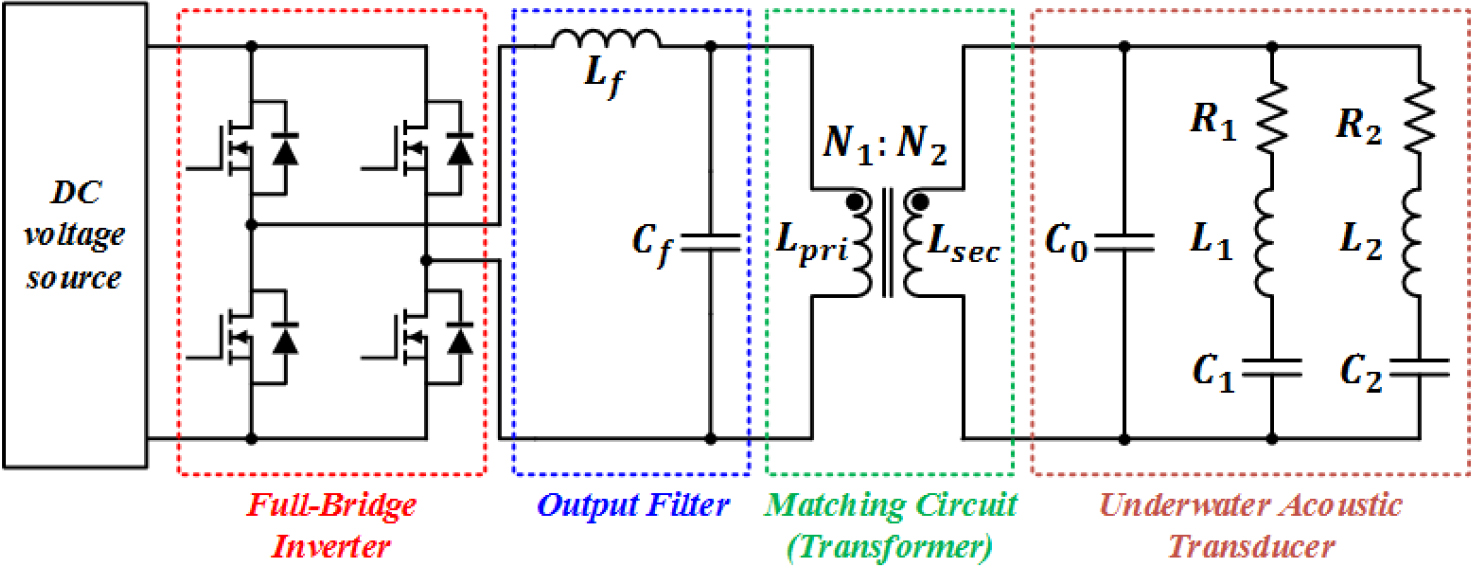
일반적인 송신기와 트랜스듀서의 구성 블록도는 Fig. 1과 같다. 송신기는 DC 전원을 인가받아 AC로 전력 변환 및 출력하여 전기신호를 트랜스듀서로 전송하고, 트랜스듀서는 수신한 전기신호를 음향신호로 변환하여 수중으로 방사한다. 이때 트랜스듀서의 임피던스는 주파수에 따라 고정값을 가지지 않고 변화하는 특성을 가지므로, 송신기의 송신 출력 또한 부하로 동작하는 트랜스듀서의 임피던스에 종속되어 변화하는 특성을 가진다. 이에 따라 송신기의 출력 특성을 시뮬레이션하고 육상에서 하드웨어 특성을 검증하기 위해서는 트랜스듀서의 전기적 임피던스 특성이 정확하게 정의되어야 한다.[5]
수중에서 운용하는 트랜스듀서는 수온 및 운용 수심 등 운용환경에 의해 특성이 변화할 수 있고, 이는 송신기의 송신 출력 특성 변동을 유발하여 과전압 또는 과전류 등의 고장이 발생할 수 있다. 또한, 송신 출력이 변동하여 높은 전압이 트랜스듀서에 인가되면 운용 수심에 따라 공동현상이 발생하게 되어 트랜스듀서가 손상되거나 또는 임피던스 변화 등에 의해 송신기와 트랜스듀서의 연동 부분에 문제가 발생할 수 있으며,[6,7,8] 이는 곧 능동 소나 시스템의 탐지 성능 저하를 초래할 수 있다.
한편, 트랜스듀서는 주파수에 따라 전기적 임피던스 특성이 크게 변하기 때문에, 주파수를 가변하는 Linear Frequency Modulation(LFM) 신호 등을 송신할 때 송신기의 송신 출력이 임피던스 변동에 능동적으로 대처하지 못할 경우 능동 소나 시스템의 안정도를 저하시키는 원인이 될 수 있다. 따라서, 트랜스듀서의 전기적 임피던스 특성 변동에도 안정적으로 송신 출력 특성을 확보할 수 있는 소나 송신기 제어 기법이 요구된다.
본 논문에서는 송신기와 트랜스듀서로 구성된 능동 소나 시스템에 대하여, 트랜스듀서의 주파수 별 전기적 임피던스 특성을 실험적 방법으로 분석하였다. 이로부터 얻어진 실측 데이터를 기반으로 등가회로를 구현하고 송신기의 설계에 활용하였다. 이를 바탕으로, 트랜스듀서의 임피던스 특성 변동에도 안정적으로 구동할 수 있는 소나 송신기의 설계 방안 및 제어 기법을 제안하였으며, 시뮬레이션 및 실험을 통하여 제안된 제어 기법의 타당성을 검증하였다.
II. 수중 음향 트랜스듀서 특성 분석
2.1 임피던스 주파수 특성 분석
수중에서 운용되는 음향 트랜스듀서의 전기적 임피던스는 리액턴스 특성에 의해 주파수에 따라 크게 변화한다.[9,10] 따라서, 송신기를 설계하기 위해서는 부하로 동작하는 트랜스듀서의 주파수에 따른 임피던스 특성 변화에 대한 분석이 선행되어야 한다.
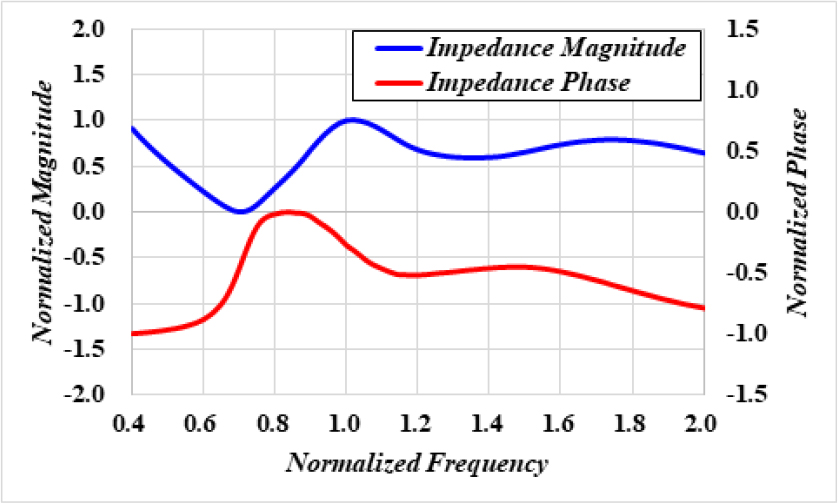
Fig. 2에는 본 연구에서 예시로 사용한 능동 소나 시스템 트랜스듀서의 운용주파수 대역 임피던스 크기 및 위상을 수중(담수)환경에서 측정하였고, 그 결과를 최소-최대 정규화하여 나타내었다. 또한, 주파수는 트랜스듀서의 중심주파수를 기준으로 정규화하였다. 임피던스 크기 및 위상은 운용주파수 대역인 정규화주파수 0.9 ~ 1.8 에서 각각 약 0.59 ~ 1.00(정규화), -0.04 ~ -0.65(정규화)의 범위를 가지며 주파수에 따라 특성이 변화함을 확인하였다. 이는 소나 송신기의 송신 출력 특성을 주파수에 따라 변화시키고 효율을 떨어뜨리는 원인이 될 수 있다. 또한, 수중에서 운용되는 트랜스듀서의 특성상 운용환경에 의한 특성 변동도 고려되어야 하는데, 이러한 환경 요인에 의한 부하의 임피던스 특성 변동으로 인해 송신기의 전력용량이 불필요하게 증가될 수 있다. 따라서, 부하 특성의 변동에도 일정한 송신 전압을 출력할 수 있는 소나 송신기를 설계하고 제어하는 기법이 필요하다.
2.2 전기적 등가회로 모델링
송신기의 주파수 특성을 시뮬레이션 및 실험하기 위해 트랜스듀서의 임피던스를 전기적으로 정확히 모의하는 것이 중요하다. 트랜스듀서의 전기적 등가회로 모델에는 대표적으로 압전상수 및 재질 등의 물성치 정보를 반영한 Mason 모델, Redwood 모델 및 KLM 모델 등이 있으나, 부정확한 물성치로 인한 오차가 발생할 수 있어 송신기의 설계에 활용하기에는 한계가 있다. 따라서, 트랜스듀서의 공진점 부근을 근사화하여 나타낸 Butterworth Van Dyke(BVD) 모델의 등가회로를 활용하여 송신기 설계 및 검증을 하였다. Fig. 3은 n개의 공진점을 갖는 트랜스듀서의 전기적 등가회로이며, 정전용량 와 직렬 공진회로의 병렬 연결로 구성된다.[11]
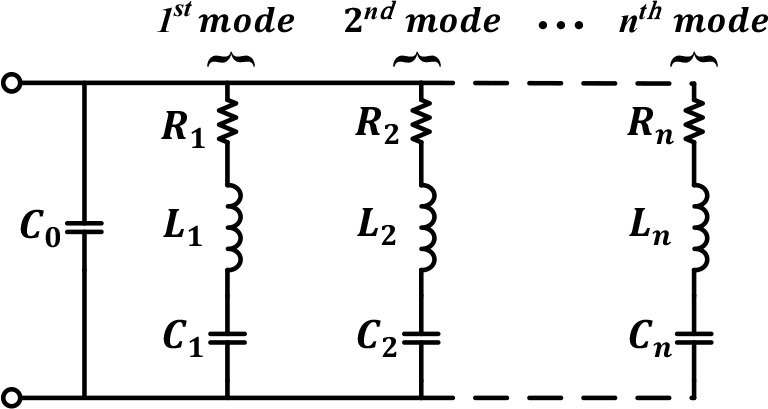
Fig. 2의 측정된 트랜스듀서는 2개의 모드를 갖는 임피던스 특성을 보이며, 이는 등가회로 측면에서 2개의 공진회로로 구현할 수 있다. Table 1은 등가회로의 최적 파라미터와 표준 파라미터 선정 결과를 나타내었다. 입자 군집 최적화 알고리즘을 이용하여 등가회로의 최적 파라미터를 추정하였다.[5] 최적 파라미터를 바탕으로 실제 제작이 가능한 표준 파라미터를 선정하였으며, 이를 적용하여 BVD 등가회로를 구현하였다.
Table 1.
Parameters of electrical equivalent circuit.
|
Optimal value (Normalized) |
Standard value (Normalized) | |
| [nF] | 1.212 | 1.234 |
| [Ω] | 0.456 | 0.456 |
| [mH] | 1.206 | 1.226 |
| [nF] | 1.282 | 1.234 |
| [Ω] | 1.544 | 1.544 |
| [mH] | 0.794 | 0.802 |
| [nF] | 0.505 | 0.510 |
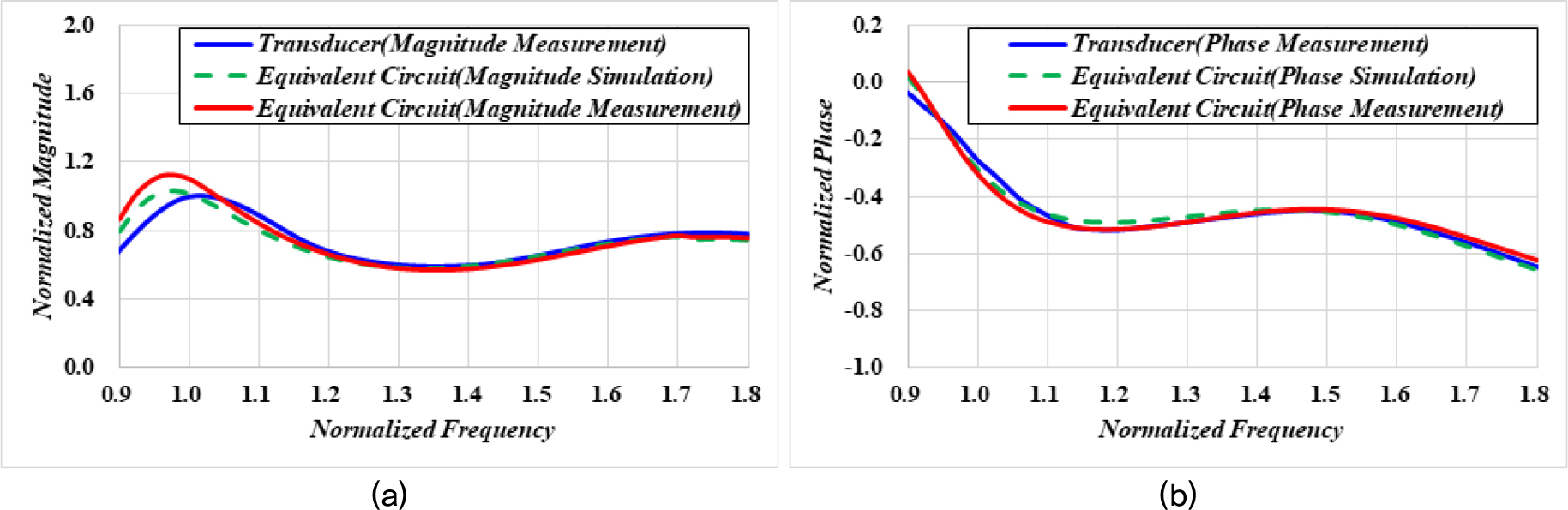
Fig. 4에는 트랜스듀서의 임피던스 실측값 대비 등가회로의 시뮬레이션 결과와 실측값을 비교하였다. 등가회로의 시뮬레이션 결과, 임피던스 크기 및 위상은 정규화주파수 0.9 ~ 1.8에서 각각 약 0.58 ~ 1.03(정규화), 0.02 ~ -0.66(정규화)의 범위를 가지며, 등가회로의 실측값은 정규화주파수 0.9 ~ 1.8에서 각각 약 0.57 ~ 1.12(정규화), 0.03 ~ -0.63(정규화)의 범위로 측정되었다. 또한, 트랜스듀서 실측값 대비 등가회로 임피던스 크기 및 위상의 실측값은 운용주파수 대역에서 평균적으로 각각 94.24 %, 95.06 % 일치함을 확인하였다. 이를 통해 제작된 등가회로와 트랜스듀서의 임피던스 특성이 유사함을 검증하였다.
III. 소나 송신기 설계
3.1 설계 사양
제안하는 소나 송신기의 설계 사양은 Table 2와 같다. DC 입력 전압은 200 Vdc ~ 300 Vdc이며, AC 출력 전압은 50 Vrms ~ 600 Vrms이다. 운용주파수는 정규화주파수 0.9 ~ 1.8이며, 부하 임피던스 크기 및 위상의 변화를 고려하여 설계한다. Pulse Width Modulation (PWM) 신호를 발생시키기 위한 스위칭주파수는 정규화주파수 20으로 선정한다. 또한, 출력 전압 편차는 주파수에 관계없이 전압 지령값의 ±5 %로 설계한다.
Table 2.
Design specifications of the proposed sonar transmitter.
3.2 토폴로지 선정
제안하는 능동 소나용 송신기의 전체 토폴로지는 Fig. 5와 같다. 송신기는 DC/AC 변환하는 풀브릿지 인버터, 스위칭 노이즈를 제거하는 LC 필터 그리고 출력 전송 효율을 증가시켜줄 수 있는 정합회로로 구성되고, 송신기 출력단에는 전기적 특성을 확인하기 위한 등가회로를 연결하였다. 송신기를 설계하기 위해 인버터 회로에서 최적의 스위칭 소자를 선정하고, 2장에서 분석된 트랜스듀서의 전기적 임피던스 특성을 적용하여 정합회로를 설계한 후 설계된 정합회로의 특성을 고려하여 LC 필터를 설계한다.
3.3 풀브릿지 인버터
소나 송신기는 공간이 제약된 수상함, 잠수함 등에 적용되기 위해 크기를 최소화하면서 높은 출력 및 전력 효율을 가져야 한다. 최근 와이드 밴드 갭 반도체 분야에서 주목받고 있는 GaN, SiC 소자는 스위치 On/Off 시간이 매우 빨라 스위칭 속도를 높일 수 있고,[1] 스위칭 손실이 낮아 전력증폭기에 적합하다. 하지만, GaN 소자는 SiC 소자보다 허용 전력용량이 작고, 발열량이 높다. 또한, 회로의 단락 사고 발생 시 SiC에 비해 빠르게 파손되는 단점이 있다. 그리고, SiC 소자는 Gate Driver용 회로를 Si 소자와 겸용으로 사용 가능하다는 장점이 있다. 따라서, 본 논문의 풀브릿지 인버터는 SiC 소자가 적용된 MOSFET Power Module을 선정하였고, 스위칭주파수 및 입/출력 설계 사양을 고려하여 Microchip Technology 사의 APTM50HM75SCTG를 적용하였다.
3.4 정합회로
트랜스듀서는 리액턴스 성분이 크기 때문에 구동 시 무효전력을 최소화하여 효율을 높이기 위해 임피던스 정합회로가 필요하다. 또한, 풀브릿지 인버터의 최대 출력 전압은 입력 DC 전압원에 의해 결정되고, 더욱 높은 전압을 출력하기 위해서는 승압이 요구된다. 따라서, 본 논문의 정합회로는 임피던스 정합과 승압 기능을 동시에 만족할 수 있는 트랜스포머 토폴로지를 적용하였다. 먼저, 트랜스듀서의 정전용량 의 리액턴스 는 2장에서 측정한 전기적 임피던스 특성으로부터 어드미턴스 와 위상 를 활용하여 Eq. (1)과 같이 구할 수 있다.
트랜스포머의 2차측 인덕턴스 로 정전용량 의 리액턴스 성분을 제거할 수 있으며, 이는 Eq. (2)와 같다.
Eqs. (1)과 (2)로부터 트랜스포머의 2차측 인덕턴스 는 다음과 같이 나타낼 수 있다.
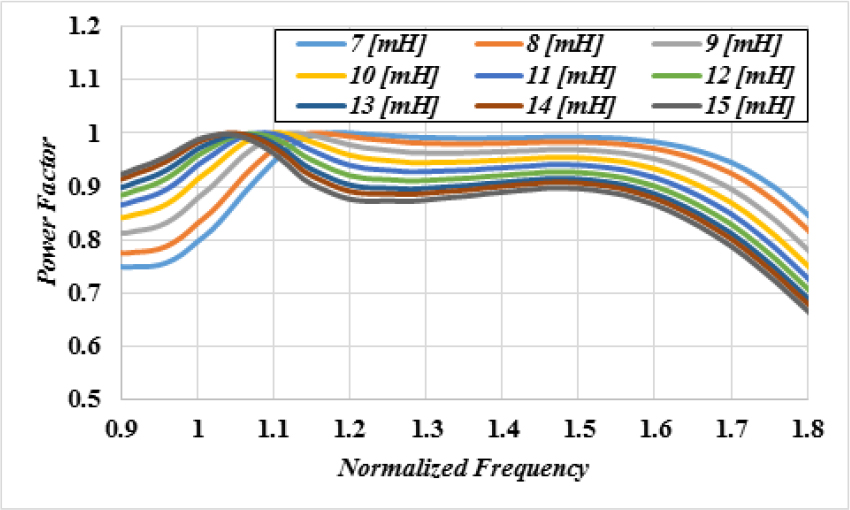
Eq. (3)에 측정된 트랜스듀서의 임피던스 크기와 위상을 적용하여 주파수 별 정합을 위한 트랜스포머 2차측 인덕턴스 를 구하면 약 7 mH ~ 15 mH이 도출되며, 운용주파수 대역에서 전반적으로 전력효율을 최대로 만들 수 있는 인덕턴스 값을 선정하였다. Fig. 6은 트랜스포머의 2차측 인덕턴스에 따른 주파수 별 역률 시뮬레이션 결과이다. 이는 트랜스듀서와 트랜스포머가 결합된 임피던스 특성에 따라 달라진다. 트랜스포머의 2차측 인덕턴스가 증가함에 따라 저주파 대역(정규화주파수 0.9 ~ 1.1)에서는 역률이 증가하고, 고주파 대역(정규화주파수 1.1 ~ 1.8)에서는 반대로 감소하는 경향을 나타낸다. 따라서, 운용주파수 대역 내에서 역률 특성을 고려하여 트랜스포머 2차측 인덕턴스는 8.0 mH로 설계하였다.
또한, 본 논문의 정합회로는 정합 기능뿐만 아니라 승압 기능을 갖고 있다. 승압을 위한 트랜스포머의 턴수비()는 풀브릿지 인버터의 DC 입력 전압과 AC 출력 전압의 관계를 활용하여 Eq. (4)와 같이 나타낼 수 있다.
여기서 는 소나 송신기의 출력 전압, 는 소나 송신기의 입력 전압, 는 전압 변환 계수, MI는 Modulation Index이다.
는 0.9, MI는 0.85로 가정하고, 입력 전압 설계 사양의 최댓값 300 Vdc가 인가될 때, 출력 전압의 최댓값 600 Vrms를 출력하기 위해 약 1:3.7로 선정하였다. 1차측 인덕턴스 는 Eq. (5)와 같이 구할 수 있으며, 약 0.58 mH이다.
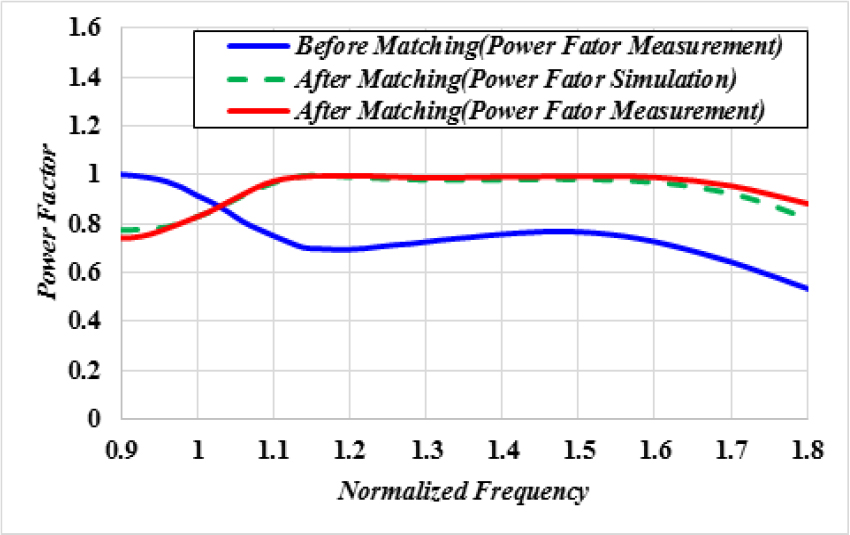
Fig. 7은 트랜스듀서에 정합회로를 적용하기 전과 후의 역률 특성을 나타낸다. 운용주파수 대역의 역률이 개선되었고, 시뮬레이션 결과와 측정 결과가 일치함을 확인하였다.
3.5 LC 필터
풀브릿지 인버터는 송신 출력 전압의 고조파 성분을 제거하기 위한 저역 통과 필터가 필요하다. Fig. 5와 같이 제안된 송신기는 트랜스듀서의 등가회로와 정합회로를 고려하여 LC 필터를 설계하여야 한다. 출력 전압의 고조파 성분을 최소화하기 위해 최소 운용주파수인 정규화주파수 0.9의 3차 고조파인 2.7 이하로 설계하였다. 따라서, 운용주파수 대역을 고려하여 차단 주파수 는 정규화주파수 약 2.48로 선정했으며, LC 필터용 인덕턴스 는 100 μH로 설계하였다. LC 필터용 커패시턴스 는 Eq. (6)과 같이 구할 수 있으며, 약 1.65 μF이다.
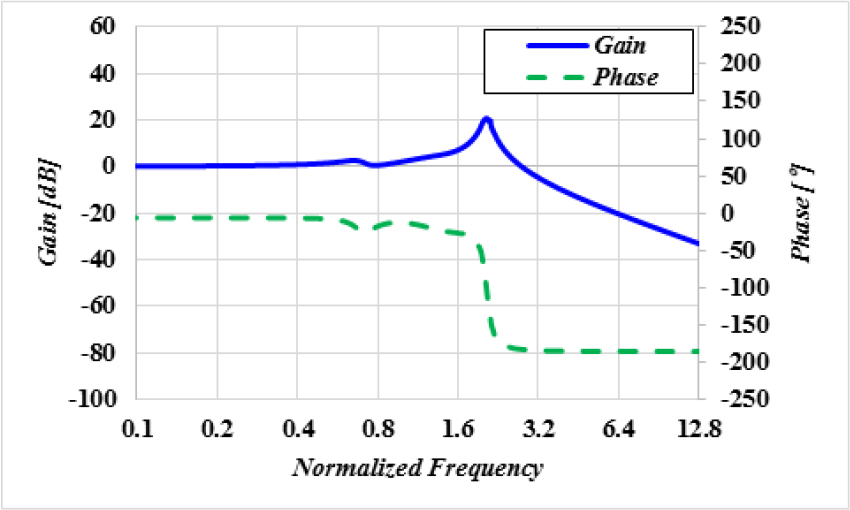
Fig. 8은 등가회로와 정합회로가 포함된 LC 필터의 주파수 응답 특성을 분석한 결과를 나타낸다. 최소 운용주파수의 3차 고조파인 정규화주파수 2.7에서의 이득은 3.1 dB이며, 설계된 LC 필터의 차단 주파수 이후부터 Gain 값이 현저히 줄어듦을 확인할 수 있다. 이를 통해 능동 소나 시스템 송신 출력의 품질을 확보할 수 있다.
IV. 소나 송신기 제어 기법
소나 송신기의 안정적인 송신 출력을 위한 제어 기법은 Fig. 9와 같다. 제안된 제어 기법은 송신기 부하인 트랜스듀서의 임피던스가 변화하는 조건에서도 실시간 제어를 통해 트랜스듀서로 일정한 전압을 출력하는 기법이다.
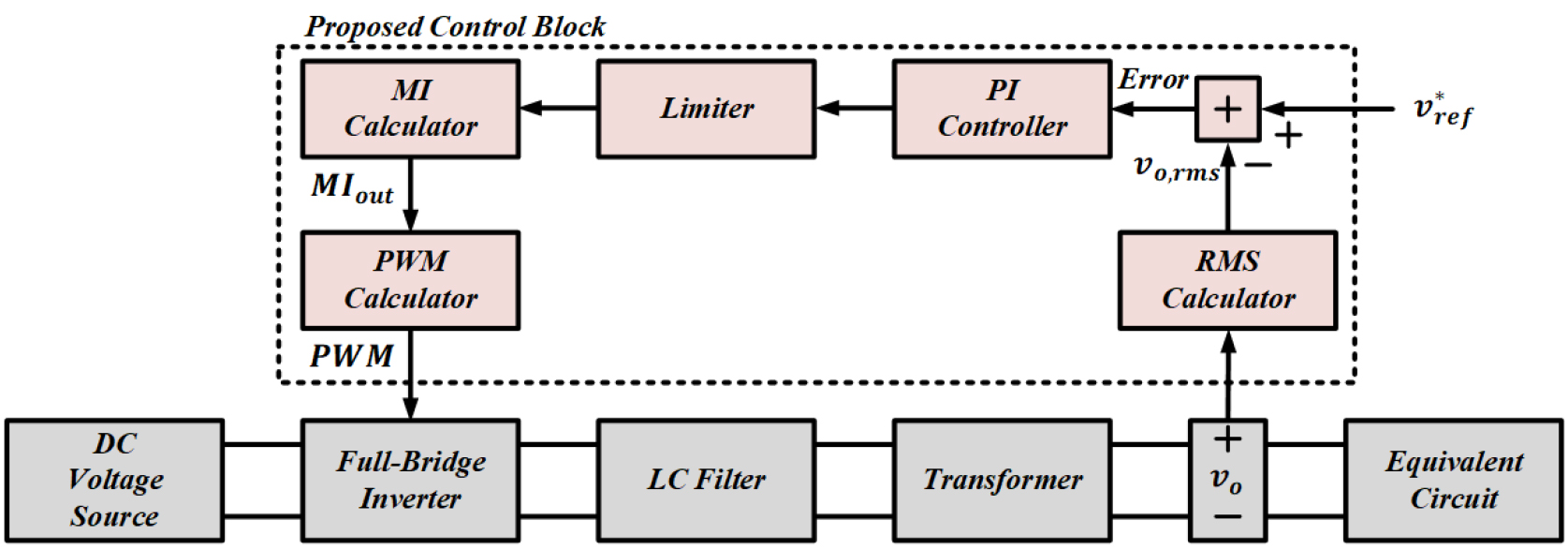
초기 동작은 전압 지령치 를 입력으로 초기 Modulation Index(MI) 값을 계산한다. 이를 통해 PWM 신호가 생성되어 풀브릿지 인버터를 동작시키고, LC 필터와 정합회로를 통해 송신기 출력 전압 가 등가회로로 출력된다. 초기 동작으로 출력된 전압은 센싱 회로를 통해 Root-Mean-Square(RMS) 값으로 계산되며, 계산된 와 를 비교하여 지령치 대비 오차량(Error)을 산출한다. Proportional Integral(PI) 제어기와 Limiter는 발생된 오차량을 제거하고, MI Calculator를 통해 최종 MI 값 을 생성한다. PWM Calculator는 를 입력으로 PWM 신호를 생성하여 풀브릿지 인버터의 스위치를 동작시킨다. 이러한 출력 제어 기법을 통하여 부하인 트랜스듀서의 임피던스가 실시간으로 변하는 LFM 신호를 송신할 경우, 일정한 송신 출력 전압을 트랜스듀서로 송신할 수 있게 된다.
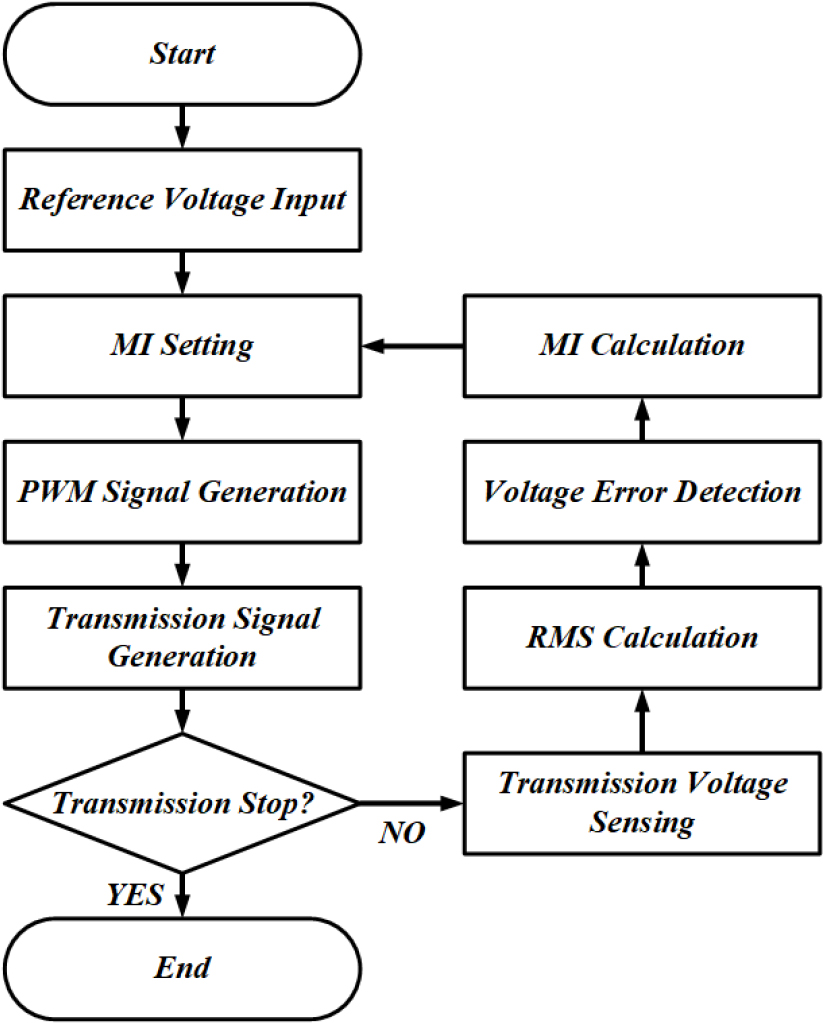
Fig. 10은 제안된 출력 제어 기법의 세부 동작 절차를 나타낸 순서도이다. 제어 지령 전압이 입력되면 초기 MI 값을 설정하고, PWM 신호가 생성되어 송신 신호를 출력한다. 그리고 모니터링 회로로부터 센싱된 송신기의 출력 전압을 RMS 값으로 계산하고, 지령 전압과 출력 전압의 오차량을 측정한다. 측정된 오차량이 0보다 크면 MI를 증가시키고 0보다 작으면 감소시켜 실시간으로 MI를 변경시킨다. 최종적으로 업데이트된 MI 값으로 송신기를 동작시켜 일정한 송신 전압이 유지될 수 있도록 제어한다. 만약, 계산된 RMS 송신 전압이 규정된 전압보다 높으면 송신기와 트랜스듀서를 보호하기 위해 송신은 중단된다.
V. 시뮬레이션
제안된 소나 송신기를 제작하기에 앞서 시뮬레이션을 통해 설계 방안 및 제어 기법에 대한 특성을 검증하였다.
시뮬레이션은 Table 3의 설정값을 기반으로, 1장에서 설계된 트랜스듀서의 등가회로를 부하로 적용하고, 2장에서 설계된 하드웨어와 3장에서 제안된 제어 기법을 적용하여 수행하였고, 그 결과를 Fig. 11에 나타내었다.
Table 3.
Setting values of the simulation.
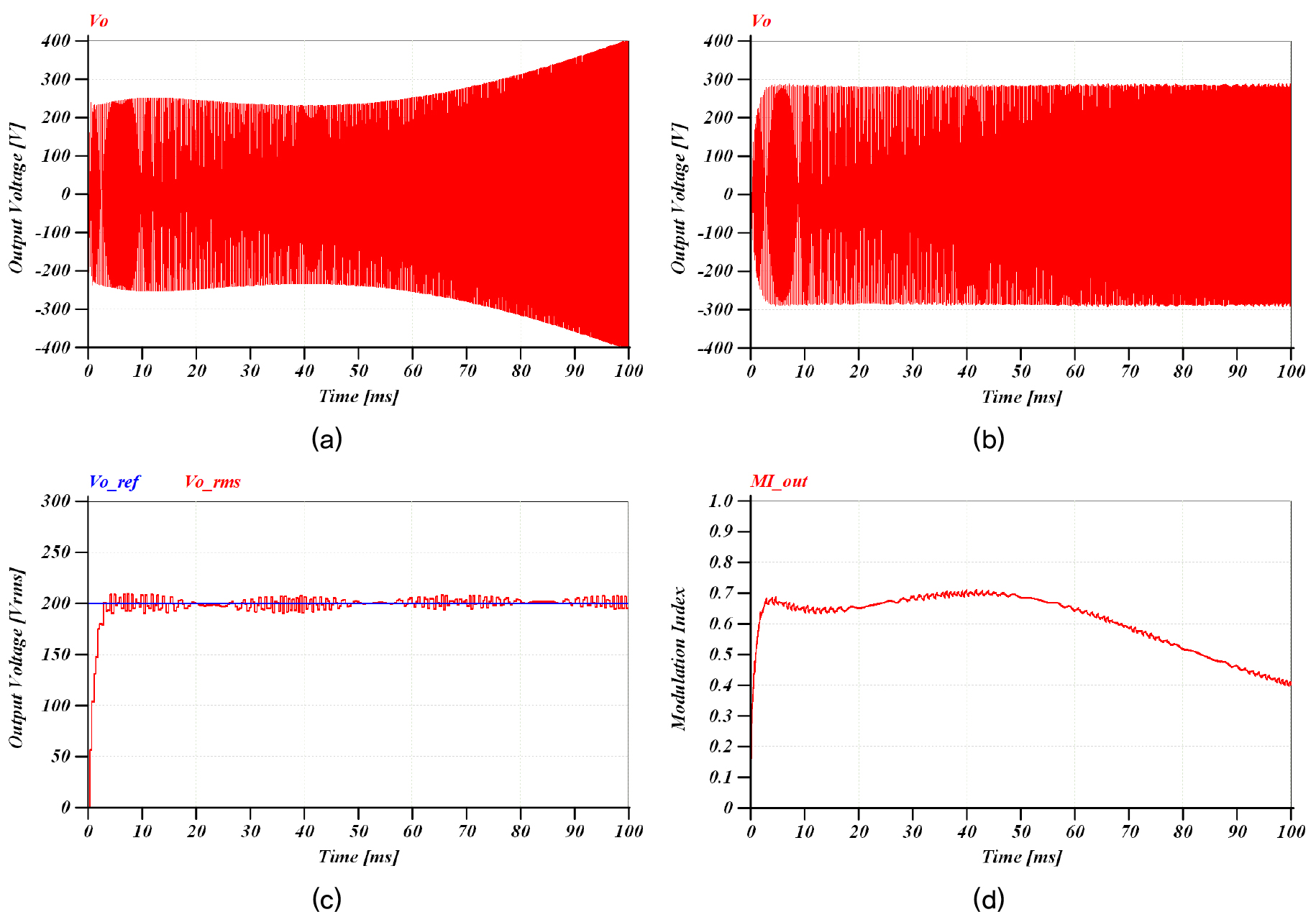
Fig. 11(a)와 11(b)는 제안된 제어 기법을 적용하기 전과 후의 송신 출력 전압을 나타낸다. 정규화주파수 0.9 ~ 1.8로 가변하는 LFM 신호를 송신할 때, 출력 제어 기법 적용 전에는 단순히 일정한 MI(0.7)에 기인하여 송신하므로 주파수에 따라 부하의 임피던스가 변화하여 출력 전압이 최소 약 160 Vrms부터 최대 약 285.67 Vrms까지 크게 변하였다. 반면에, 출력 제어 기법을 적용하면 출력 전압 피드백 및 실시간 MI 제어하여 송신하므로 부하의 임피던스 변화에 관계없이 최소 약 196 Vrms부터 최대 약 206 Vrms까지 변하였다. 이는 지령 전압 대비 약 –2.0 % ~ 2.5 %의 전압 편차율을 가지며 일정한 크기의 송신 전압을 출력함을 알 수 있다.
Fig. 11(c)에 지령 전압 대비 출력 전압을 비교하였으며, 출력 전압은 지령 전압을 추종하며 송신하는 것을 볼 수 있다. 이 때의 실시간으로 변하는 MI는 Fig. 11(d)와 같으며, 200 Vrms를 출력하기 위해 MI를 가변하여 제어하는 것을 볼 수 있다.
VI. 실험 및 결과 분석
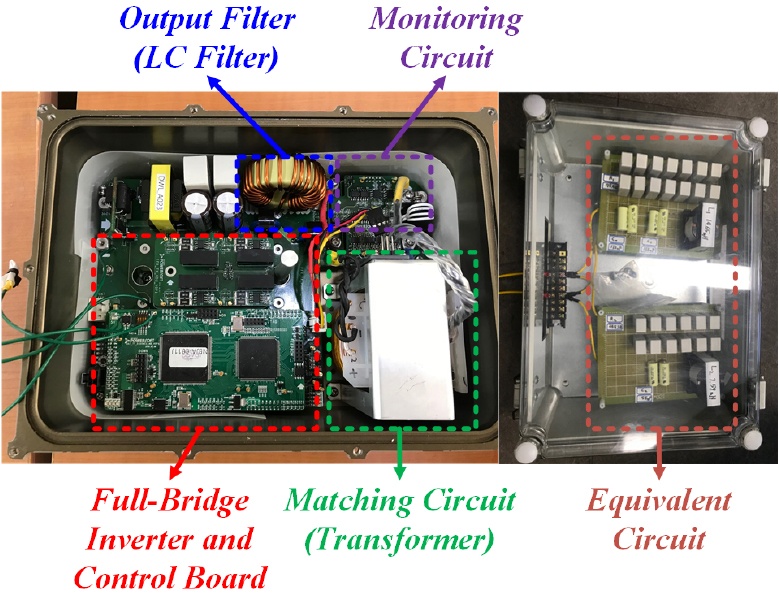
본 논문에서는 제안된 소나 송신기의 성능을 검증하기 위하여 Fig. 12와 같이 송신기와 트랜스듀서 등가회로를 제작하였다.
송신기의 송신 출력 특성을 검증하기 위해 Fig. 13과 같이 트랜스듀서를 모의하는 등가부하, 소나 송신기, DC 전원공급기와 제어 장비로 실험을 구성하였다. DC 전원공급기는 200 Vdc로 설정하여 송신기로 DC 전원을 공급했으며, 송신기의 MI는 0.7로 설정하였다. 송신 전압을 측정하기 위해 운용주파수 대역 내에서 규정된 송신 주파수는 정규화주파수 0.9 ~ 1.8로 구동하였다. 또한, 부하의 임피던스 특성을 가변하기 위해 LFM 신호로 구동하였고, 송신기 내부의 모니터링 회로로부터 검출된 출력 신호를 상용 계측장비로 측정하였다.
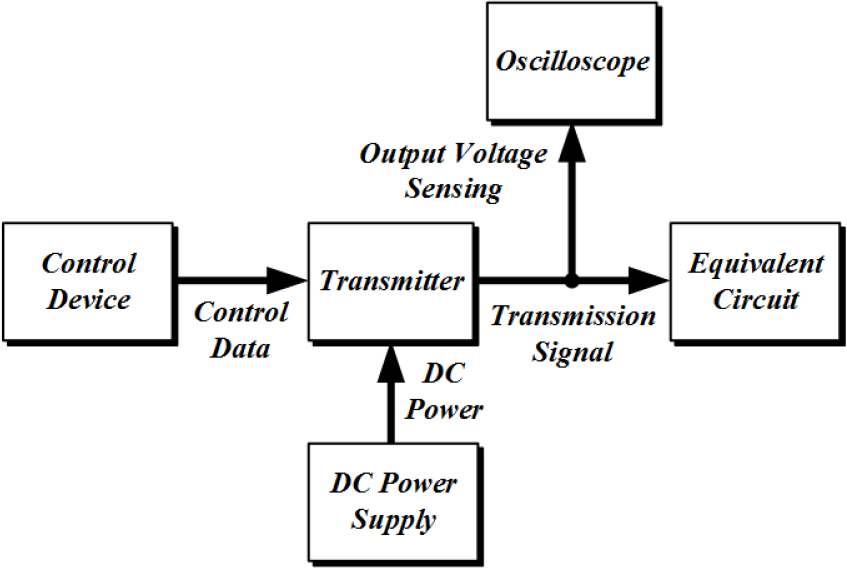
Fig. 14(a)와 14(b)는 각각 제안된 출력 제어 기법을 적용하기 전과 후의 송신 출력 전압을 나타내며, 제어 지령 전압은 200 Vrms로 설정하였다. 제어 기법을 적용하기 전에는 트랜스듀서의 임피던스가 LFM 주파수에 따라 가변되어 출력 전압이 변하는 것을 확인하였고, 제어 기법을 적용하면 일정한 송신 전압을 출력하는 것을 확인하였다.
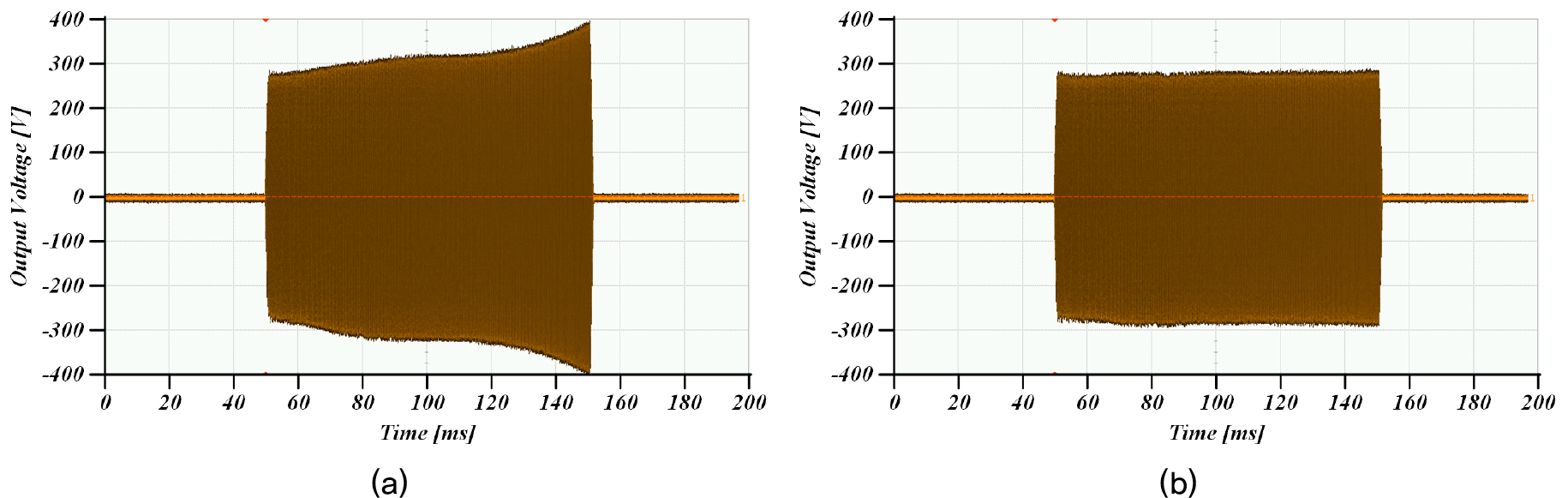
Table 4는 출력 제어 기법을 적용하기 전과 후의 출력 전압과 지령 전압 대비 편차율을 나타내었다. 제어 기법을 적용하기 전에는 출력 전압이 최대 약 280.88 Vrms, 편차율은 최대 약 40.44 %로 측정되었으며, 제어 기법을 적용하면 출력 전압이 최대 약 200.33 Vrms, 편차율은 최대 약 -0.93 %로 측정되었다. 이 결과로부터 수중 음향 트랜스듀서를 구동할 때, 소나 송신기의 출력은 부하의 임피던스 특성에 따라 크게 변화하는 것을 확인하였고, 제안된 소나 송신기의 설계 및 출력 제어 기법은 임피던스가 가변되는 상황에서도 안정적으로 일정한 송신 전압으로 구동할 수 있음을 검증하였다.
Table 4.
Output Voltage and deviation rate before and after applying the control method.
VII. 결 론
본 논문에서는 송신 주파수에 따라 전기적 임피던스 특성이 변하는 수중 음향 트랜스듀서를 안정적으로 구동하기 위한 소나 송신기의 설계 및 출력 제어 기법을 제안하였다. 트랜스듀서의 전기적 임피던스 특성을 실험적으로 분석하여 등가회로를 설계하였다. 또한, 소나 송신기를 구성하는 주요 구성품(풀브릿지 인버터, LC 필터, 정합회로)에 대한 설계 과정을 제시하였고, 실시간으로 출력 전압을 모니터링하여 일정한 출력 전압 특성을 가지는 제어 기법을 제안하였다. 또한, 제안된 소나 송신기의 성능 검토를 위해 시뮬레이션을 수행하여 제안된 제어 기법의 유효성을 검증하였다.
마지막으로, 소나 송신기를 제작하여 성능을 보임으로써, 트랜스듀서의 임피던스가 가변하는 LFM 송신 신호에서 안정적으로 일정한 송신 전압을 출력할 수 있음을 실험을 통하여 검증하였다. 제안된 소나 송신기의 설계 및 출력 제어 기법은 급격한 부하 특성 변화 조건에서도 수중 음향 트랜스듀서를 안정적으로 구동할 수 있어, 능동 소나 시스템에서 효과적으로 활용될 것으로 판단된다.
