

I. 서 론
II. 모드 확장법 적용
2.1 모드 확장법 이론
2.2 전동기 3D 형상 모델링
2.3 모드 해석 기반 유한 요소 모델 구축
2.4 중첩 모드 선정
2.5 모드 기여도 계산
2.6 구조·음향 연성 이론
III. 실험 및 해석
3.1 진동 및 방사소음 측정
3.2 모드 확장법 기반 진동 및 방사소음 예측
3.3 실험 및 해석 결과 비교
IV. 결 론
I. 서 론
전폐형 유도 전동기는 산업 현장의 핵심 구동 장치이며, 운전 중 발생하는 구조 진동은 하우징을 통해 외부로 전달되어 방사소음을 유발한다. 진동·소음 예측에는 모드중첩법(Mode Superposition Method, MSM)과 같은 수치 기반 기법이 널리 사용되지만, 해석 모델의 이상화와 경계조건 불확실성 등으로 인해 실제 거동과의 차이가 발생할 수 있다. 이에 비해 모드 확장법(Modal Expansion Method, MEM)은 실험 가속도 데이터를 활용하여 보다 현실에 가까운 응답을 도출할 수 있으며, 특히 복잡한 구조물에서 가진력 규명 없이도 타겟 표면의 응답을 예측할 수 있다는 장점이 있다.
MEM은 제한된 측정 데이터로부터 전체 구조의 진동장을 복원하는 기법으로, 센서 설치 개수의 제약과 수치 모델의 부정확성을 동시에 완화할 수 있는 효율적인 방법으로 알려져 있다. 그동안 MEM의 유효성은 다양한 기계 및 구조물을 대상으로 검증됐다. 예를 들어 세탁기[1]의 진동장 규명과 모드 선정 기법 연구에 적용되었고, 패널[2] 및 원통형 구조물[3]과 같은 비교적 단순한 구조부터 해양 구조물[4]과 같은 복잡한 구조까지 폭넓게 활용되었다. 더 나아가 구조 진동을 소음원으로 설정하여 전동기·엔진·배관계[5,6,7,8]의 방사소음을 해석하는 구조·음향 연성 연구도 수행된 바 있다.
본 연구에서는 이러한 선행 연구의 방법론을 실제 산업용 전폐형 유도 전동기에 적용하여 운전 중 진동장을 예측하고, 이를 기반으로 방사소음 해석까지 수행하였다. 먼저 3D 모델링 및 실험 모드 해석(Experimental Modal Analysis, EMA), 모드 상관 계수(Modal Assurance Criterion, MAC) 분석을 통해 신뢰성 있는 유한요소 모델을 구축하였다. 이후 전동기 운전 시 측정한 표면 가속도 응답을 이용해 모드 기여도를 산정하고, 전동기 전체 표면의 진동장을 예측하였다. 마지막으로 재구성된 진동장을 소음원으로 사용한 구조·음향 연성 해석 결과를 실측 방사소음과 비교하여 제안 기법의 정확도를 검증하였다.
II. 모드 확장법 적용
2.1 모드 확장법 이론
구조물의 운전 중 진동 응답은 여러 고유 모드의 중첩으로 표현될 수 있다. 주파수 영역에서 구조물의 복소 가속도 응답 벡터 는 다음과 같이 나타낼 수 있다.
여기서
:측정 지점에서 복소 가속도 벡터
𝛷 : 모드 형상 행렬
: 주파수별 모드 기여도 벡터
를 의미한다. 또한 m은 측정 지점 수, n은 고려된 모드 수이다. 과소 결정계를 방지하기 위해 m이 n보다 크거나 같아야 신뢰성 있는 결과를 얻을 수 있다. 모드 형상 벡터 와 모드 기여도 를 이용하면 전체 응답은 다음과 같이 표현된다.
이는 구조물 고유 모드들의 선형 결합을 통해 복잡한 전체 구조 응답이 정의됨을 의미한다. 즉, 모드 확장법은 이러한 모드 간의 직교성 원리를 이용하여 일부 계측 데이터로부터 진동장을 재구성하는 과정이다.
2.2 전동기 3D 형상 모델링
본 연구에서는 전동기 표면의 진동 및 방사소음 해석을 위한 유한요소 모델을 구축하기 위해, 실제 전동기를 분해하고 주요 구성품의 치수를 실측하여 3D 형상 모델을 제작하였다. 3D CAD 모델은 Autodesk Inventor를 이용하여 제작하였으며, Fig. 1과 같이 전동기를 전면 커버, 하우징 및 고정자, 축·회전자·베어링, 후면 커버의 네 가지 주요 부품군으로 구분하여 모델링하였다.
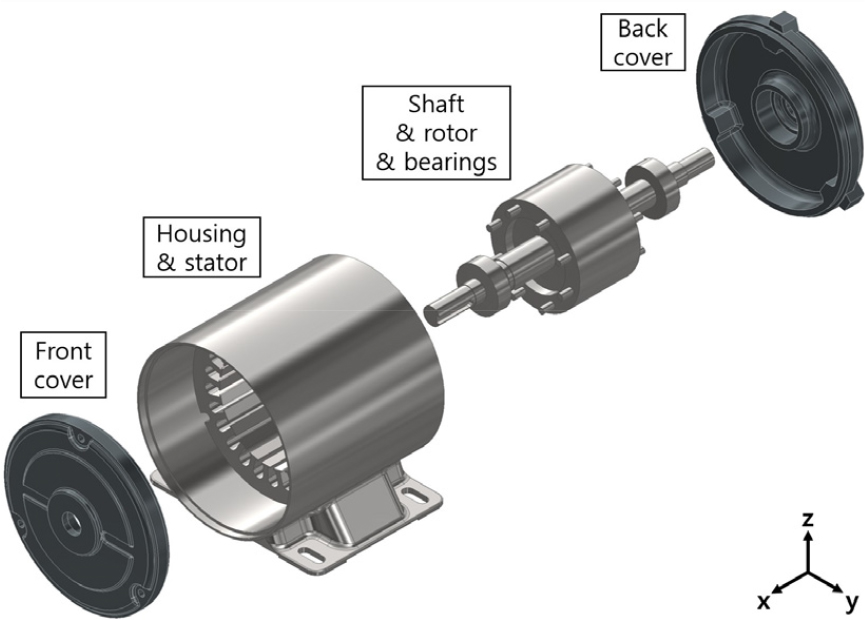
원 전동기에는 축에 냉각팬이 장착되어 있으나, 본 연구는 전동기 표면의 진동에 의해 발생하는 방사소음 예측을 주된 목적으로 한다. 이에 따라 팬 회전에 따른 유동소음 및 팬 커버의 영향을 배제하기 위하여, 본 연구에서는 팬과 팬 커버를 제거한 조건에서 모델링, 해석 및 실험을 수행하였다.
2.3 모드 해석 기반 유한 요소 모델 구축
모드 확장법에 사용되는 중첩 모드 형상 행렬 𝛷을 확보하기 위하여, 2.2절에서 모델링한 3D 형상을 기반으로 유한 요소 모델(Finite Element Model, FEM)을 구축하였다. 우선 제조사에서 제공한 재료 정보와 실측 질량을 바탕으로 주요 부품의 초기 밀도 및 탄성계수를 선정하였다. 이후 EMA 결과와 비교하면서 부품의 형상, 밀도 및 탄성계수를 조정하였다. 이 과정을 통해 결정된 주요 물성치와 질량 정보는 Table 1에 정리하였다.
Table 1.
Material properties and mass information of the induction motor components.
해석 효율성을 고려하여 고정자 내부의 구리 권선은 개별 형상으로 상세 모델링하지 않고, 등가 질량으로 치환하여 하우징 모델에 반영하였다. 또한 축·회전자·베어링의 경우 실제 재질의 표준 밀도를 그대로 적용하면 형상 단순화로 인한 체적 차이로 인해 실측 질량과 불일치가 발생하였다. 따라서 실측 질량을 기준으로 산출한 등가 밀도를 적용하여 수치 모델의 질량 특성을 보정하였으며, 이를 통해 실제 구조물의 동특성이 유한 요소 모델에 적절히 반영되도록 하였다.
구축한 유한 요소 모델의 타당성을 검토하기 위해 전면 커버, 후면 커버 및 전동기에 대한 EMA를 수행하였다. 우선 전면 커버와 후면 커버에 대해 단품 EMA를 진행했다. 전면 커버의 경우 총 32개의 측정점을 수신점으로 선정하였으며, 이 중 2개 지점을 가진점으로 설정하였다. 후면 커버는 총 34개의 측정점을 수신점으로 선정하고, 동일하게 2개 지점을 가진점으로 설정하였다. 각 단품은 자유 경계조건에서 1축 가속도계와 임팩트 해머를 이용한 충격 시험을 통해 실험 모드 형상을 도출하였다. 실험 모드 해석은 Simcenter SCADAS와 Testlab을 이용하여 수행하였다.
이후 전동기 어셈블리에 대해서도 충격 시험을 수행하였다. 전동기의 측정점은 후면 커버 15개, 전면 커버 15개, 하우징 20개로 구성하여 총 50개 지점을 수신점으로 선정하였으며, 이 중 6개 지점을 가진점으로 설정하였다. 전동기 운전 시 실제로 발현될 수 있는 모드 특성을 반영하기 위하여, 하우징의 마운트를 광학 정반에 볼트로 체결하여 고정 경계조건을 구현하였다. 3축 가속도계와 임팩트 해머를 사용하였으며, 가속도계를 각 측정점으로 순차적으로 이동시키며 주파수 응답 함수(Frequency Response Function, FRF)를 획득하는 로빙 가속도계 방식을 사용하였다.
실험을 통해 추출한 모드 형상과 비교하기 위하여, 동일한 경계조건의 유한 요소 모델에 대해 Simcenter 3D의 Nastran SOL103 기반 모드 해석을 수행하였다. 이후 Simcenter 3D의 Correlation & Update 기능을 이용하여 실험과 해석 모드 형상 간의 MAC을 계산하였다. MAC 값은 다음과 같이 정의된다.
여기서 와 은 각각 실험 및 해석에서 얻은 복소 모드 벡터를 의미하며, 는 복소 켤레 전치를 나타낸다. MAC 값은 0에서 1 사이의 값을 가지며, 1에 가까울수록 두 모드 형상이 서로 유사하고, 0에 가까울수록 두 모드 형상의 상관성이 낮음을 의미한다.
MAC 결과는 Table 2와 Fig. 2에 정리하였다. Table 2에서 확인할 수 있듯이, 대부분의 모드에서 MAC 값이 0.8 이상으로 나타나 실험과 해석의 모드 형상이 잘 일치함을 확인하였다. 다만 전면 커버 및 후면 커버 단품에 비해 전동기 어셈블리에서는 모드 주파수 오차가 상대적으로 크게 나타났다. 이는 어셈블리 모델에서 각 단품의 메쉬 조밀도, 형상 치수, 밀도 및 탄성계수 오차가 누적되었기 때문으로 판단된다.
Table 2.
MAC values and frequency errors of the front cover, back cover and motor.
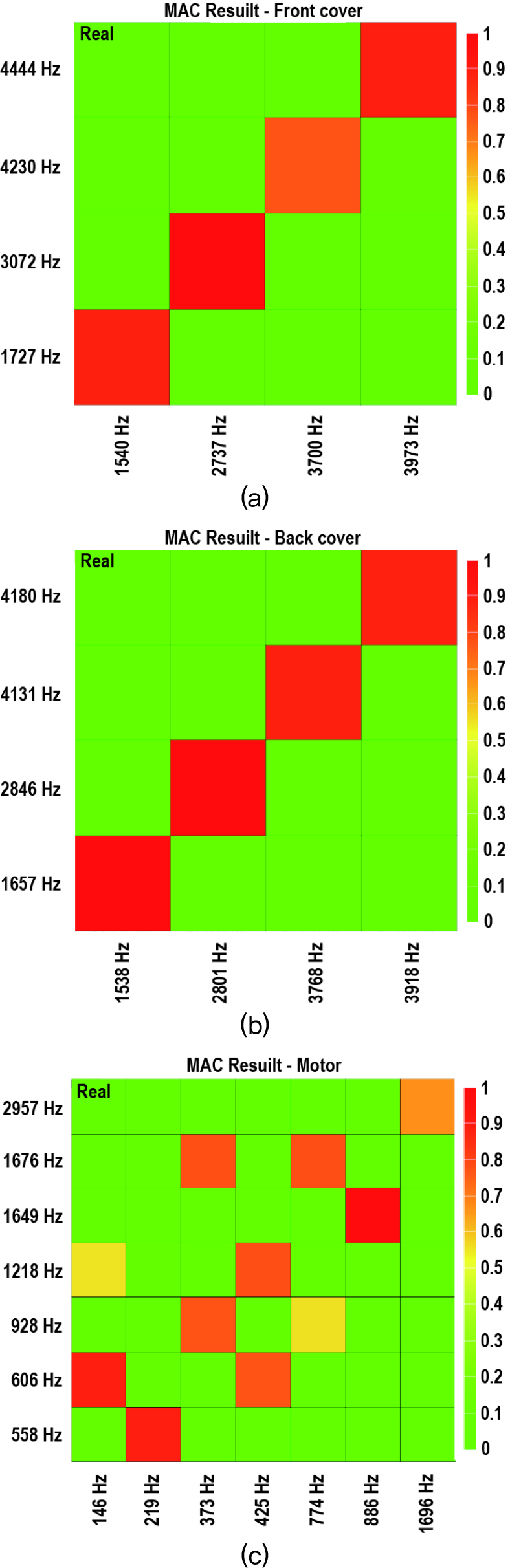
Fig. 2(c)의 MAC 행렬에서는 일부 모드에서 비대각 성분에 0.5 이상의 MAC 값이 나타나는 것을 확인할 수 있다. 이는 서로 다른 모드 간에 부분적인 형상 유사성이 존재하거나, 실험 모드 해석 시 공간 분해능이 충분하지 않은 경우 발생할 수 있다. 전동기 EMA에서는 전면 커버, 후면 커버 및 하우징 표면에 가속도계를 부착하여 모드 형상을 측정하였으나, 축·회전자·베어링에는 3축 가속도계를 부착할 공간이 제한적이어서 해당 부품군의 국부 모드를 충분히 반영하기 어려웠다. 따라서 일부 비대각 원소의 MAC 값은 측정 지점의 공간 분해능 한계에 따른 국부 모드의 미반영에 기인한 것으로 판단된다.
그럼에도 불구하고 본 연구의 모드 확장법에서는 모드 주파수 자체보다 중첩 모드 형상의 확보가 중요하며, 주요 대응 모드에서 충분히 높은 MAC 값을 확인하였다. 따라서 구축한 유한 요소 모델은 전동기 구조의 주요 동특성을 적절히 재현하는 것으로 판단되며, 본 연구의 모드 확장법에 사용되는 중첩 모드 형상 행렬 𝛷을 도출하는 데 사용하였다.
2.4 중첩 모드 선정
2.3절에서 구축한 유한 요소 모델을 기반으로 1 Hz부터 5 000 Hz의 주파수 영역에 대해서 COMSOL Multiphysics를 사용하여 고유진동수 해석을 수행하였다. 해석 결과 해당 주파수 대역 내에서 총 20개의 모드가 추출되었다. 모드 확장법을 적용하기 위해서는 전체 모드 중 구조 응답 및 방사소음에 지배적으로 기여하는 주요 모드를 선별하는 과정이 필요하다.
본 연구에서는 방사소음 관점에서 전역 모드이면서 굽힘 모드를 우선적으로 선정하였다.[1] 전역 모드는 전동기 표면 전체의 진동장을 표현하는 데 유리하며, 굽힘 모드는 음향 방사 효율이 높다. 모드를 평가하기 위해 다음과 같은 전역·국부 지표(Global·Local index, GL)를 사용하였다.
여기서 𝛷는 모드 형상 벡터를 의미하며, 는 모드 형상 벡터를 전동기 표면의 법선 방향으로 변환하는 행렬이다. 또한 E는 평균값을, max는 최대값을 의미한다. GL 값이 1에 가까울수록 해당 모드는 전체 표면 진동 및 방사소음 예측에 지배적으로 기여할 가능성이 높다.
앞서 추출한 20개의 모드에 대해 GL 값을 계산한 후, 이를 내림차순으로 정렬하였다. 이 중 GL 값이 큰 상위 11개 모드를 모드 확장법에 사용되는 중첩 모드로 선정하였으며, 그 결과를 Table 3에 정리하였다.
Table 3.
Selected modes based on the GL.
| Order of eigenvectors | Mode frequency [Hz] | GL |
| 19 | 4 717 | 0.329 |
| 6 | 1 127 | 0.328 |
| 13 | 2 862 | 0.322 |
| 15 | 3 780 | 0.312 |
| 17 | 3 990 | 0.309 |
| 2 | 573 | 0.287 |
| 9 | 2 248 | 0.285 |
| 16 | 3 827 | 0.269 |
| 1 | 536 | 0.268 |
| 7 | 1 604 | 0.251 |
| 8 | 1 610 | 0.251 |
한편 Table 3에 제시된 일부 모드 주파수는 Table 2의 실험–해석 상관성 검토에 사용된 모드 주파수와 차이를 보인다. 이는 Table 2에서는 Simcenter 3D 기반의 실고유값 모드 해석 결과를 사용한 반면, Table 3은 진동 및 방사소음 해석의 효율성과 연성 해석의 편의성을 고려하여 COMSOL의 모드 해석 결과를 사용하였기 때문이다. 또한 해석 시간의 절감을 위해 COMSOL에서는 구조 FEM에 상대적으로 coarse한 메쉬를 적용하였으며, 이로 인해 동일한 형상, 물성치, 경계조건이라 하더라도 솔버 및 메쉬 조밀도 차이에 따라 모드 주파수에 일부 차이가 발생했다. 그러나 주요 모드 형상은 전반적으로 유사하게 나타났기 때문에, 본 연구에서는 COMSOL에서 도출한 모드를 기반으로 중첩 모드를 선정하고 모드 확장법에 적용하였다.
2.5 모드 기여도 계산
일반적으로 측정 지점 수 m이 사용 모드 수 n보다 큰 경우, 모드 확장 관계식은 과잉 결정계가 된다. 이때 모드 형상 행렬은 정방행렬이 아니므로 직접적인 역행렬 계산이 불가능하며, 모드 기여도(Modal Participation Factor, MPF)는 의사 역행렬을 이용하여 산정할 수 있다.
여기서 는 의사 역행렬을 의미한다. 본 연구에서는 각 주파수 성분에 대해 위 식을 적용하는 직접법을 사용하였다. 전체 관심 주파수 대역에 대한 응답을 행렬 형태로 구성하면 다음과 같다.
은 임의의 절점 개수이며, 는 타겟 주파수이다. 이에 대응하는 모드 기여도 행렬은 다음과 같다.
따라서, 전체 주파수 영역에서의 모드 확장 행렬 관계는 아래와 같이 나타낼 수 있다(는 응답, 𝛷는 모드 형상 행렬, 는 기여도).
의사 역행렬 계산은 모드 형상 행렬 𝛷의 수치적 조건에 큰 영향을 받는다. 특히 모드 형상 행렬의 각 모드 형상의 진폭 크기가 서로 크게 다를 경우, 특이값 간의 차이가 증가하여 의사 역행렬 계산이 불안정해질 수 있다. 이러한 수치적 불안정성은 기여도 산정 과정에서 특정 모드의 기여도를 과대 또는 과소평가하는 원인이 될 수 있다.
한편 상용 유한 요소 해석 프로그램에서 도출되는 고유 모드 형상은 절대적인 진폭 정보를 갖는 응답이 아니라, 상대적인 변위 분포를 나타낸다. 즉, 해석 모드 형상 벡터들의 크기는 서로 크게 다를 수 있다. 따라서 모드 확장법에서 실험 응답과 해석 모드 형상을 결합하여 기여도를 계산하기 위해서는, 각 모드 형상의 크기를 일관된 기준으로 정규화하는 과정이 필요하다.
본 연구에서는 전동기 외부 표면의 법선 방향 가속도를 기준으로 모드 형상을 정규화하였다. 즉, 각 모드에 대해 전동기 외부 표면에서의 최대 법선 방향 가속도 성분을 사용하여 다음과 같이 정규화를 수행하였다.
여기서 𝛷는 모드 형상 벡터, 는 모드 형상을 전동기 외부 표면의 법선 방향 성분으로 변환하는 행렬, 는 정규화된 모드 형상 벡터이다. 이와 같은 정규화는 모드 형상의 물리적 분포 자체를 변경하는 것이 아니라, 각 모드 벡터의 상대적인 크기 기준을 통일하는 과정이다. 이를 통해 임의적인 모드 형상 진폭으로 인해 발생할 수 있는 기여도 계산 오차를 줄이고, 모드 형상 행렬 𝛷의 수치적 안정성을 향상시킬 수 있다.
정규화 전후의 수치적 안정성은 특이값 분해(Singular Value Decomposition, SVD)를 이용하여 검토하였다. 모드 형상 행렬 𝛷는 다음과 같이 분해할 수 있다.
여기서
와 는 각각 좌특이행렬과 우특이행렬이며, T는 켤레 전치를 의미한다. 는 특이값을 대각 성분으로 갖는 특이값 행렬이고, 대각 원소 𝜎가 가장 큰 값부터 차례로 정렬된다. 이때 특이값 차이를 비교하기 위하여 조건수를 사용한다. 모드 형상 행렬의 조건수는 다음과 같이 정의된다.
조건수가 클수록 행렬의 역문제가 수치적으로 불안정하며, 의사 역행렬을 이용한 기여도 계산 시 오차가 증폭될 가능성이 커진다. 본 연구에서 선정된 모드 형상 행렬의 조건수는 정규화 전 73.81로 계산되었다. 이는 각 모드 형상의 진폭 크기 차이로 인해 의사 역행렬 계산 시 수치적 오차가 발생할 수 있음을 의미한다. 이에 따라 전동기 외부 표면의 최대 법선 방향 가속도 기준으로 각 모드 형상을 정규화한 결과, 조건수는 8.86으로 감소하였다. 따라서 본 연구에서는 정규화된 모드 형상 행렬을 사용하여 의사 역행렬을 계산하였으며, 이를 통해 보다 안정적이고 신뢰성 있는 기여도를 산정하였다.
2.6 구조·음향 연성 이론
구조 진동과 방사소음은 표면 법선 속도를 매개로 연결된다.
여기서 는 물체 표면 법선 방향 속도, 는 법선 방향 가속도이다. 또한 방사 음향 파워는 표면 S의 법선 방향 속도의 제곱에 비례한다.
일반적인 구조·음향 연성계의 운동방정식은 구조 자유도와 음향 자유도를 포함하는 블록 행렬 형태로 표현할 수 있다.[7,8]
여기서
Eq. (15)의 는 각각 질량, 감쇠 및 강성 행렬이며, 는 응답 행렬, 는 가진 행렬이다. Eqs. (18), (19), (20), (21), (22), (23)의 아랫첨자 는 구조, 는 음향 해석 영역을 의미한다. Eq. (21)은 연성 행렬이며, 은 형상 행렬을 의미한다. Eq. (23)에서 는 구조물에서의 변위이며, 는 음향공간에서의 음압이다. Eqs. (15), (16), (17)까지의 윗첨자의 점은 시간 미분을 나타낸다.
본 연구에서는 구조 진동이 음향장에 미치는 영향을 고려하되, 음향장에서 발생한 압력이 다시 구조 응답에 미치는 영향은 무시하는 단방향 연성을 적용하였다. 따라서 Eq. (20)의 C 값이 0이 된다. 이는 전동기 하우징의 구조 진동에 의해 발생하는 방사소음을 예측하는 것이 주 목적이며, 공기 중 방사소음 해석에서는 음향 압력이 구조물에 미치는 영향이 상대적으로 작다고 판단했기 때문이다.
III. 실험 및 해석
3.1 진동 및 방사소음 측정
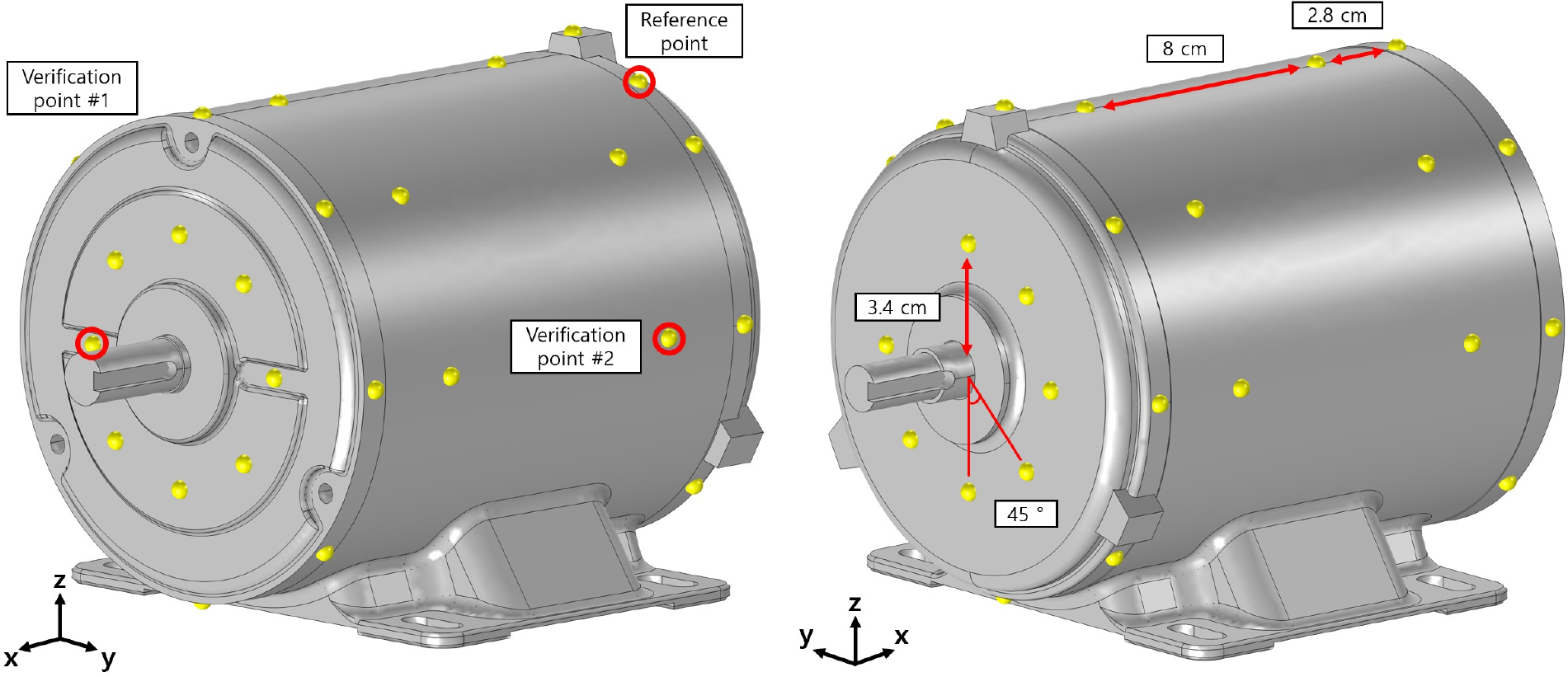
Figs. 3, 4와 같이 42개 지점의 전동기 운전 중 표면 가속도를 계측했다. 측정점 간의 위상 정보 반영을 위해 Simcenter Testlab의 운전 변형 형상(Opertional Deflection Shape, ODS) 기능을 사용하여 계측하였다. 모든 가속도는 자기상관, 교차상관 함수 계산을 통해 각 측정 지점 간의 상대 위상 정보가 유지된다. 계측된 주파수 영역의 복소 응답 벡터는 Eg. (5)의 에 입력 데이터로 사용된다. 표면 법선 방향의 가속도를 계측하기 위해 1축 가속도 센서 5개를 사용하였으며, 이 중 1개를 위상 기준으로 고정시켰다. 나머지 4개의 센서를 순차적으로 이동시키며 전체 측정 지점의 가속도 신호를 계측하였다.
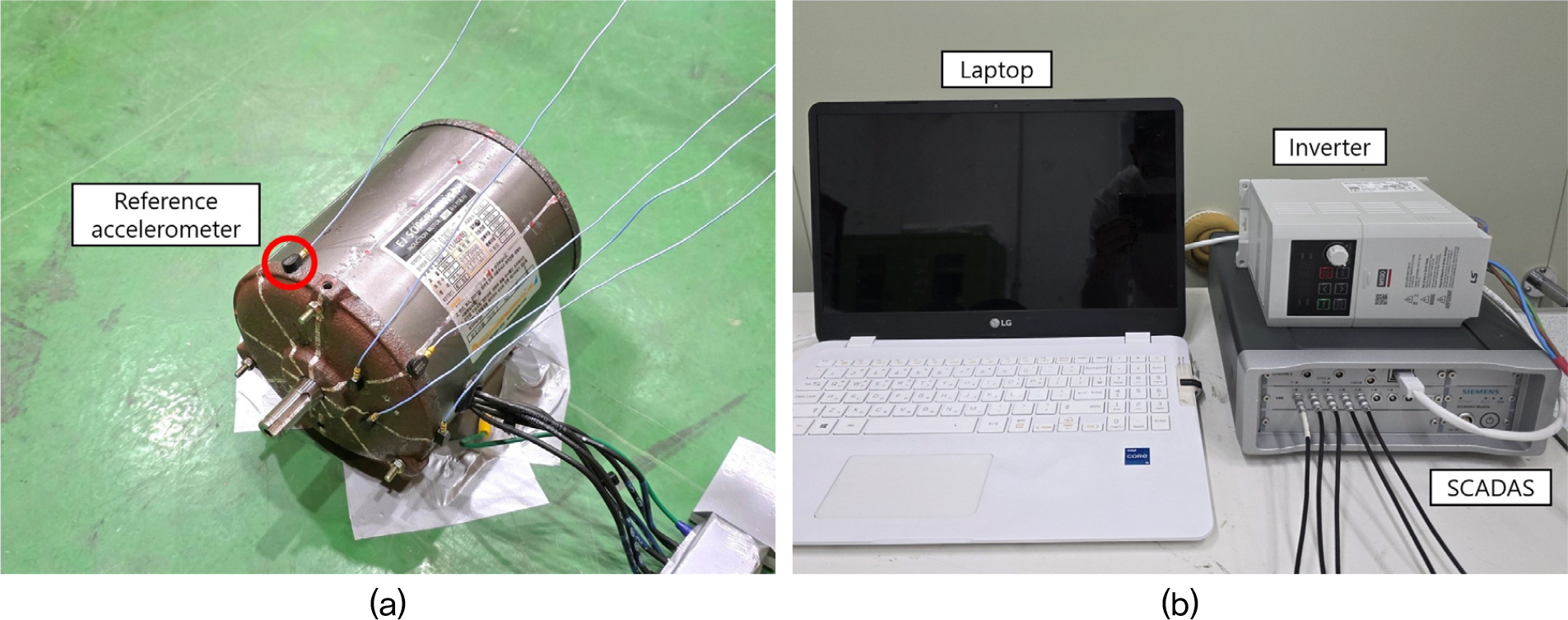
본 실험에서는 인버터를 이용해 전동기의 전기 입력 주파수를 400 Hz로 설정하였다. 사용한 4극 유도 전동기는 정격 입력 주파수 60 Hz에서 회전수 1 710 r/min을 갖는다. 따라서 400 Hz 입력 조건에서 이론적 동기 속도는 12 000 r/min이며, 슬립률을 동일하게 가정할 경우 회전 속도는 약 11 400 r/min으로 추정된다. 해당 조건은 전동기의 정격 운전 조건을 초과하는 고속 운전에 해당한다. 따라서 약 20 s 이내의 단시간 동안만 운전하였으며, 계측 직후 즉시 정지시켜 장시간 고속 운전에 따른 발열 및 기계적 부담을 최소화하였다. 진동 및 방사소음 계측은 전동기가 정상상태에 도달한 후 수행하였다.
진동 계측과 동일한 운전 조건에서 전동기의 방사소음을 측정하였다. Fig. 5(a)와 같이 전동기 왼쪽 표면 중앙에서 20 cm 떨어진 곳에 마이크로폰을 설치했다. 반무향실 바닥에 전동기를 고정시키고, 운전 시 음압 레벨(Sound Pressure Level, SPL)을 측정하였다. 측정 신호 처리 정보는 Table 4와 같다.
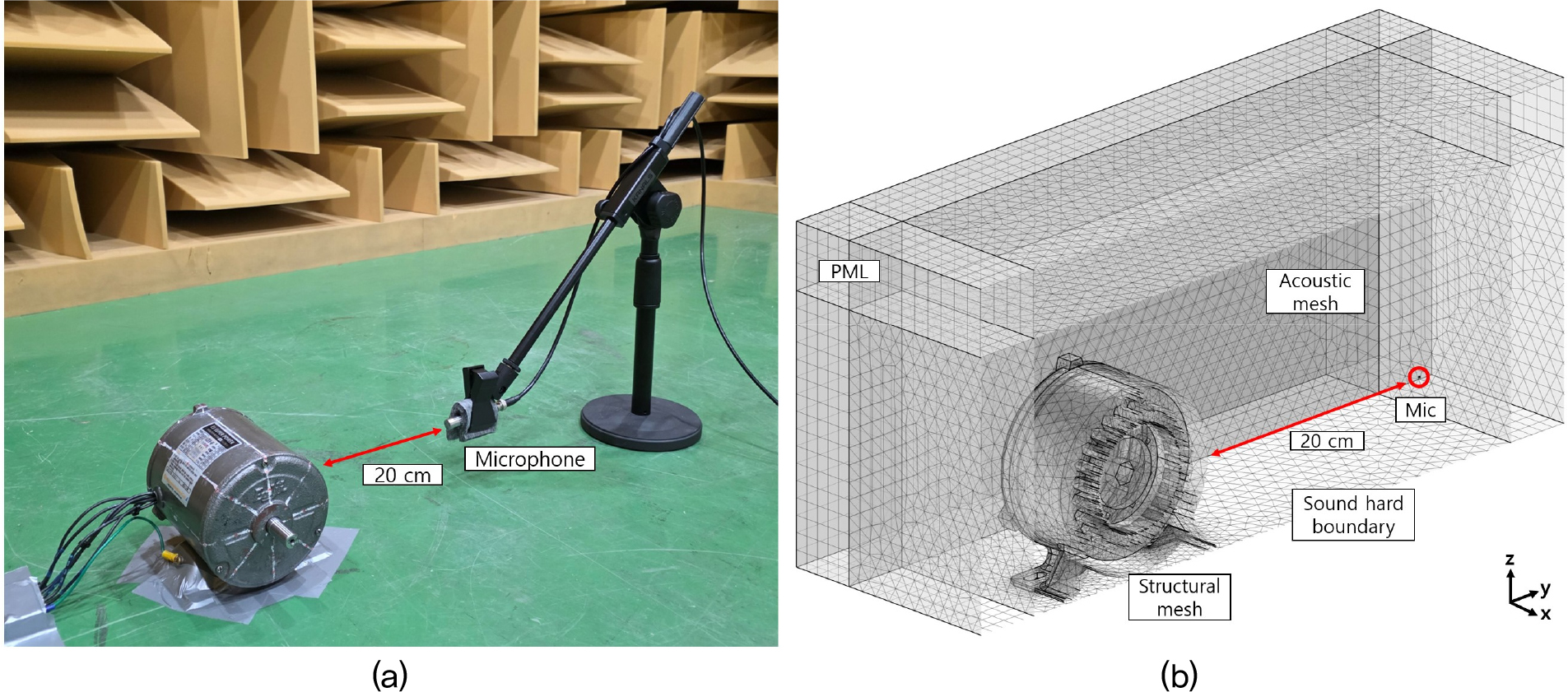
Table 4.
Signal processing parameters for vibration and noise measurements.
3.2 모드 확장법 기반 진동 및 방사소음 예측
3.1절에서 취득한 42개의 가속도 데이터 중, 검증점 1, 2(Verification Point #1, 2)를 제외한 40개의 포인트의 가속도 데이터를 모드 확장법에 사용하여, 전동기 표면 전체의 운전 중 진동장을 예측하였다. 위 과정에서 COMSOL Multiphysics의 Solid Mechanics, Frequency domain에서 보간 기능을 사용했다. 예측한 진동장을 prescribed acceleration 기능을 사용하여 전동기 표면의 법선 방향 진동으로 매핑하였고, 이를 구조·음향 연성 소음원으로 사용했다. 전동기 해석 모델은 마운트와 바닥 사이에 6 자유도 Fixed 경계조건을 부여하여 완전히 고정시켰다. 전체적인 해석 격자 모델은 Fig. 5(b)에 나타나 있다. 유체 메쉬는 타겟 주파수인 4 500 Hz의 파장의 6분의 1 크기로 제작하였다. 반무향실 환경과 동일하게 옆면과 윗면은 완전정합층(Perfectly Matched Layer, PML), 바닥면은 완전반사층경계조건을 부여하였다. 전동기 표면을 구조·음향 연성 면으로 지정했다. 소음 실험과 동일하게 전동기 왼쪽 표면 중앙에서 20 cm 떨어진 위치에 Mic Probe를 지정하여 SPL을 계산하였다.
3.3 실험 및 해석 결과 비교
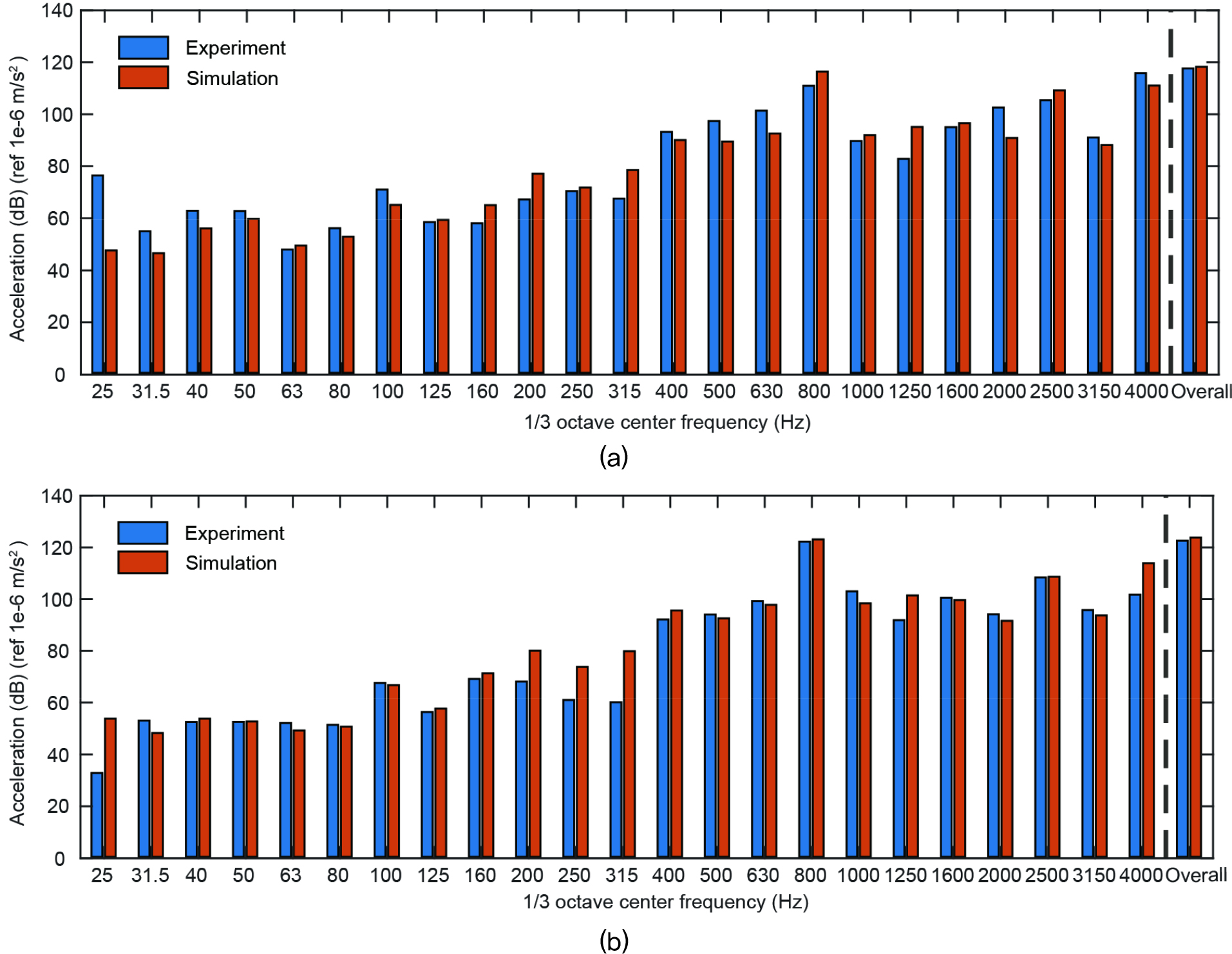
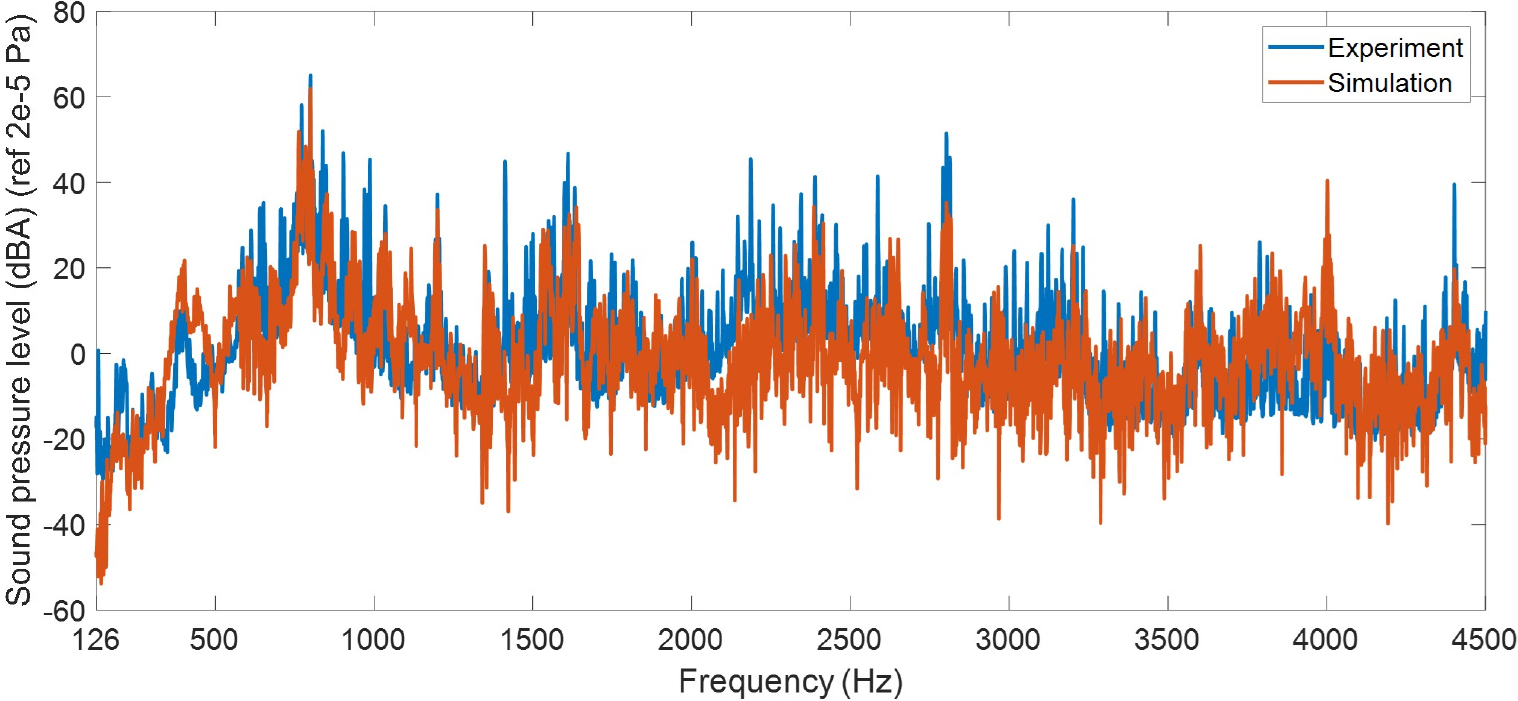
진동 관심 주파수 대역인 1 Hz부터 4 500 Hz에 대해 1/3 옥타브 밴드로 결과를 분석했다. Fig. 6은 검증점 1, 2에서 계측된 가속도 응답과 본 연구의 예측 기법을 통해 도출된 해석 값을 비교한 결과이다. 진동 가속도 레벨은 기준값 10–6 m/s2에 대해 dB로 환산하였다. 진동 스펙트럼의 주파수 해상도는 실험과 해석 모두 1 Hz로 설정하였다. Table 5에서 볼 수 있듯 두 검증점의 진동 Overall level의 오차는 각각 –0.6 dB, –1.25 dB로, 진동장 예측이 잘 수행되었다고 볼 수 있다. 하지만 특정 옥타브 밴드에서 진동 오차가 비교적 큰 것을 확인할 수 있다. 주요 원인으로는 모드 개수 부족이 있다. 본 연구에서는 GL 기법을 통해 11개 모드만을 선택하여 모드 확장법을 수행하였으나, 복잡한 운전 변형 형상이 나타나는 주파수 대역에서는 선택된 모드 개수가 전체 거동을 완벽히 복원하기에 부족했을 가능성이 있다. 또한, 모드 중첩에 사용한 보간 과정에서도 진동 진폭의 오차가 발생할 수 있다. Fig. 7은 검증점에서의 방사소음 계측값과 본 기법의 예측값을 비교한 결과이다. 방사소음 분석에서 SPL(dBA)의 기준값은 2 × 10–5 Pa를 사용하였다. 실험을 진행한 반무향실의 차단 주파수가 125 Hz임을 고려하여 소음 스펙트럼 분석은 126 Hz부터 4 500 Hz까지 수행하였다. 또한 소음에 대해서는 실험, 해석 모두 A-weighting을 적용했다. Table 5에서 볼 수 있듯이 해당 주파수 대역에서 Overall level 차이는 2.12 dBA 차이로, 모드 확장법을 사용한 방사소음 예측이 유효함을 확인할 수 있다. 하지만 특정 주파수에서 실험 SPL이 해석 값보다 높게 나타나는 것을 확인할 수 있다. 이는 수치 해석에서는 바닥을 완전반사층에 움직이지 않는 강체로 가정하였으나, 실제 실험에서는 전동기 운전 시 발생하는 진동이 반무향실 바닥을 가진하여 추가적인 구조기인 소음을 유발했을 가능성이 있다. 또한, 바닥과 마이크 사이의 거리가 7.1 cm로 매우 가까운 편인데, 이로 인한 바닥 반사의 영향이 해석 상에 완벽히 반영되지 못했을 수 있다. 그리고 진동 및 방사소음 계측 시 실험 여건상 전동기는 반무향실 바닥에 설치한 후 테이프를 이용하여 고정하였다. 이는 해석 모델에서 적용한 6 자유도 Fixed 경계조건과 완전히 동일하지는 않으므로, 경계조건 차이에 따른 진동 및 방사소음 예측 오차가 발생할 수 있다. 향후 연구에서는 고정 지그 또는 체결 조건을 개선하여 실험 경계조건을 해석 모델과 보다 일치시킴으로써 예측 정확도를 향상시킬 필요가 있다.
IV. 결 론
본 연구에서는 실제 가동 중인 유도 전동기의 표면 진동 및 방사소음을 예측하기 위하여 MEM을 적용하였다. 먼저, 전면 커버, 후면 커버 및 전동기 어셈블리에 대해 EMA를 수행하고, 해석 결과와 MAC 값 분석을 통해 유한요소 해석 모델의 타당성을 확보하였다. 다음으로, GL 값을 기준으로 방사소음 해석에 지배적인 상위 11개의 모드를 선정하였다.
실제 가동 상태의 동특성을 반영하기 위해 ODS 기능을 활용하여 운전 시 전동기 표면의 복소 가속도 응답을 측정하였다. 선정된 11개의 모드와 40개 지점의 실측 가속도 데이터를 사용하여 모드 확장법을 진행하고, 전동기 표면 전체의 진동장을 복원하였다. 두 검증 지점에서 최대 1.25 dB 이내의 진동 레벨 오차를 기록하여 높은 수준의 진동 복원 정밀도를 확인하였다. 이를 기반으로 방사소음을 예측한 결과, Overall SPL 기준 2.1 dBA의 오차 범위를 나타내었으며, 주요 방사소음의 크기가 실험값과 유사함을 확인하였다.
위 결과를 통해, 본 연구에서 제안한 방법론은 전체 표면의 가속도를 직접 측정하지 않고도 제한된 수의 센서 데이터만으로 복잡한 구조물의 전체 진동 및 방사소음 특성을 합리적으로 예측할 수 있음을 입증하였다. 이는 측정 환경이 제한되는 실제 산업 현장에서도 효과적으로 적용 가능한 실무적 가치가 높은 기법으로 판단된다.
