

I. 서 론
II. 빔 형성 기법
III. 해상실험 및 결과 분석
3.1 해상실험
3.2 전송 신호 패킷 구성
3.3 수신신호의 방향성
3.4 신호 대 간섭 잡음 비
IV. 통신 성능
V. 결 론
I. 서 론
최근 해양 기술 발전과 더불어 수중 통신에 대한 관심이 증가하고 있다. 수중에서 전자기파의 손실이 큼에 따라 RF(Radio Frequency)의 사용에 한계가 있으며, 흡수와 산란손실로 인하여 광학 통신도 어렵다. 반면 음향의 경우 손실이 적어 장거리 전송이 가능하므로, 음파를 이용한 통신 연구가 진행되고 있다.[1-3]
수중 음향의 전파 환경은 수심별 음속에 따라 영향을 받으며, 해양 도파관의 구조로서 해수면의 거칠기 및 해저면의 매질 등 다양한 환경 변수를 고려해야 하는 복잡성을 지닌다.[4] 따라서 다중경로로 인한 지연확산(time-spread)과 수중 매질의 유동 혹은 인위적인 송/수신기의 이동으로 인한 도플러 편이가 발생하며, 이로 인하여 발생한 인접 심볼 간 간섭(Inter-Symbol Interference, ISI)은 통신 성능에 영향을 미친다.[1-3]
시변동성 다중경로 채널 특성의 수중음향 통신에서는 인접 심볼 간 간섭을 완화하기 위한 방법으로 등화기 기법이 널리 사용되고 있다.[2,5-7] 뿐만 아니라 시역전 기법, 위상 추정 기법, 공간 다이버시티 등이 연구되고 있다.[8-11]
본 논문에서는 빔 형성을 기반으로 배열이득(Array Gain, AG)과 위상고정루프(Phase Locked Loop, PLL)가 포함된 공간 필터 기법을 제안하며, 통신 성능 향상에 목적을 둔다. 또한 실제 해상 실험 데이터에 적용하여 제안된 기법의 성능을 검증하고자 한다.
본 논문은 2013년도 한국음향학회 추계학술발표대회에 소개한 바 있으며[12] 구성은 다음과 같다. 제2장에서 빔 형성을 이용한 공간 필터를 소개하고, 제3장에서 해상 실험에 제안된 기법을 적용한다. 제 4장에서는 개선된 통신 성능을 확인하고, 마지막 제 5장에서 결론을 맺는다.
II. 빔 형성 기법
음향 전파에 있어서 다중경로로 인한 간섭 신호가 존재하며, 시간이 흐름에 따라 다양한 방향에서 신호가 수신된다. 이에 시간적 필터링을 사용한다 하더라도 공간상 신호 분리에는 한계가 있다.[13]
빔 형성기는 수신 배열의 특성상 발생하는 응답지연을 이용하여 신호의 방향성을 추정하고, 빔 조향 기법을 이용하여 필요한 방향의 신호와 그 외 불필요한 방향의 간섭 신호들을 공간상으로 분리하는 공간필터의 효과를 갖는다.[13-18]
음원으로부터 방사된 음파는 구형으로 확산되며, 일정한 거리가 지나면 원통형 확산이 된다. 원통형 확산으로 평면파가 수신 배열에 도달할 경우 센서별 위상차는 선형관계를 가지므로 연산이 간단하며 이를 far field라 한다.
본 논문에서는 far field로 가정하여 빔 형성을 수행하였으며 빔 형성에 대한 이해도는 Fig. 1과 같다. 방향벡터  을 가지는 음원이 전파될 때
을 가지는 음원이 전파될 때  개의 센서로 이루어진 수신 배열의 각 센서별 시간 영역 수신신호는 다음과 같다.
개의 센서로 이루어진 수신 배열의 각 센서별 시간 영역 수신신호는 다음과 같다.
 .
.여기서  은 수신기 위치 벡터,
은 수신기 위치 벡터,  은 음원의 방향벡터,
은 음원의 방향벡터,  는 음속,
는 음속,  은 시간 영역 송신 신호를 뜻한다. 즉, 음원의 방향벡터와 수신기 위치 벡터에 따라 지연 시간이 달라지고 이를 이용하여 음원의 방향성을 추정한다. 식(1)에 빔 형성 인자를 첨가한 식은 다음과 같다.
은 시간 영역 송신 신호를 뜻한다. 즉, 음원의 방향벡터와 수신기 위치 벡터에 따라 지연 시간이 달라지고 이를 이용하여 음원의 방향성을 추정한다. 식(1)에 빔 형성 인자를 첨가한 식은 다음과 같다.
 .
. 은 -90°부터 90°까지의
은 -90°부터 90°까지의  개의 빔 조향(beam steering) 벡터로서 실제 음원의 방향 벡터와 일치할 경우 식(2)에서의 각 센서별 수신 신호는
개의 빔 조향(beam steering) 벡터로서 실제 음원의 방향 벡터와 일치할 경우 식(2)에서의 각 센서별 수신 신호는  가 되고 동일한 위상을 갖는다. 이에 coherent 상태로 배열 이득을 얻어 신호의 세기를 향상하며, 그 외의 방향성 신호는 incoherent 상태의 배열 이득을 얻는다.[17]
가 되고 동일한 위상을 갖는다. 이에 coherent 상태로 배열 이득을 얻어 신호의 세기를 향상하며, 그 외의 방향성 신호는 incoherent 상태의 배열 이득을 얻는다.[17]
주파수 영역에서 빔 형성은 시간 영역에서의 연산보다 빠르고 간략하다. 각 센서별 수신 신호의 주파수 영역에서 방향성 스펙트럼 신호를 이용하며 식(3)과 같이 표현된다.
 .
.여기서  는 -90°부터 90°까지의 빔 조향 벡터이고
는 -90°부터 90°까지의 빔 조향 벡터이고 는 hermitian transpose를 뜻한다.
는 hermitian transpose를 뜻한다.  는 실제 수신된 신호의 방향성을 지닌 벡터로서 방사된 음원의 방향성을 담고 있다. 따라서 실제 음원으로부터 수신된 신호 벡터(signal vector)와 빔 조향 벡터를 정합 필터(matched filter)에 적용함으로써 상관관계를 이용하여 음원의 방향성을 추정한다.[19-20]
는 실제 수신된 신호의 방향성을 지닌 벡터로서 방사된 음원의 방향성을 담고 있다. 따라서 실제 음원으로부터 수신된 신호 벡터(signal vector)와 빔 조향 벡터를 정합 필터(matched filter)에 적용함으로써 상관관계를 이용하여 음원의 방향성을 추정한다.[19-20]
III. 해상실험 및 결과 분석
3.1 해상실험
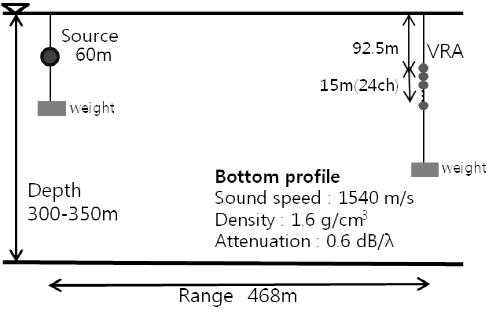
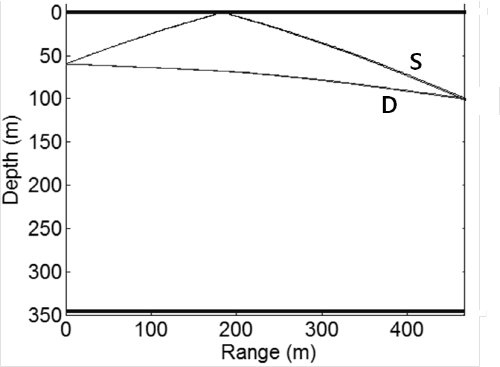
본 실험은 2010년 10월 동해시 인근 해역에서 실행하였으며, 실험 구성은 Fig. 2와 같고 당시 해역의 음속 구조는 Fig. 3와 같다. 송신기는 수평으로는 무지향성(omni-directional)이고 수직으로는 ±40°의 유효 빔 폭을 가지며 수심 60 m에 위치한다. 수신기는 수직 선 배열인 POEMS(Portable Ocean Environment Monitoring System)를 사용하였고, 수심 92.5 m~107.5 m에 위치하며 24개의 센서가 nested 배열로 구성된다. 채널당 수신 샘플링 주파수는 65536 Hz이다. 송/수신기 간의 거리는 468 m로 무게추로 고정하여 실험을 수행하였다.
|
Fig. 2. The geometry of the sea-going experiment. |
|
Fig. 3. The sound speed profile at East-sea in Oct. 2010. |
|
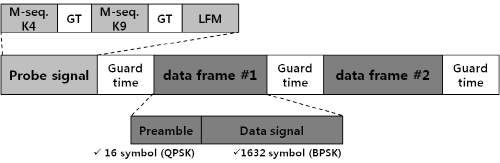
Fig. 4. The transmitted signal packet. |
3.2 전송 신호 패킷 구성
전송 신호는 채널응답특성을 위한 탐침 신호(probe signal)와 통신용 데이터 신호로 구성된다. 탐침 신호의 경우, 중심주파수 6 kHz로 사용하며 M-sequence 신호의 K4(15 chips), K9(511 chips)과 4 kHz(4 kHz~8 kHz) 대역의 LFM(Linear Frequency Modulation)으로 구성된다. 데이터 신호의 경우, 중심주파수 6 kHz로 동일하며 QPSK로 변조된 16개 프리앰블 심볼과 BPSK로 변조된 1632개 데이터 심볼로 구성된다. 총 60프레임을 전송하였으며 각 프레임의 전송률은 약 3.2 kbps (bit per sec)를 갖는다.[7,21]
3.3 수신신호의 방향성
|
(a) |
|
(b) |
Fig. 5. The acoustic propagation modeling by BELLHOP. (a) eigenray (ch.12), (b) arrival time and amplitude (ch.12). |
BELLHOP은 음선 이론을 근거로 한 음향 전파 모델로써 해수면과 해저면의 경계 조건 및 음속 구조 와 같은 해양 환경 정보를 입력하여 음선과 손실 및 도달 시간의 정보를 도출한다.[22] 실험 당시 해역의 해양 환경 정보를 토대로 BELLHOP을 수행하였으며, 수신 배열 중 12번째 채널의 정보는 Fig. 5와 같다. 채널응답특성은 직접파와 해수면 반사파로 나타나며 간섭이 일어나지 않는 구간은 약 10 ms로 예측된다. 수신 방향성으로는 직접파의 경우 8.07°, 해수면 반사파의 경우 21.87°로 예측된다.
실제 해상 실험에서의 시간상 채널응답특성은 Fig. 6와 같으며, 수신 채널 1번과 22번은 기기 결함으로 인하여 수신 상태가 열악한 것을 확인하였다. BELLHOP의 결과물과 동일하게 직접파와 해수면 반사파의 채널응답특성이 나타나며 해수면 반사파 채널의 경우 해수면파의 동적인 요인으로 인하여 상호 간섭이 발생함을 보인다. 공간상의 채널 특성을 위하여 -90°부터 90°까지 1°간격으로 빔 형성을 수행하였으며, Fig. 7과 같이 직접파 방향의 10°와 해수면 반사파의 23°로 수신 신호의 방향성이 나타났다.
3.4 신호 대 간섭 잡음 비
본 절에서는 해상 실험 데이터 중 수신된 탐침 신호를 이용하여 공간 필터를 적용하였으며 신호 대 간섭 잡음 비(Signal-to-Interference plus Noise Ratio, SINR)를 비교하여 제안된 기법의 성능을 검증하고자 한다.
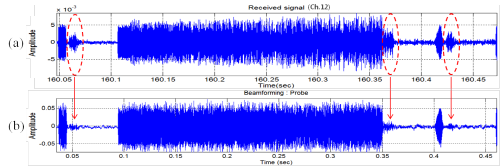
빔 형성을 적용하여 수신 신호의 방향성을 추정하였으며, 직접파 방향(10°)으로 빔을 조향하여 배열 이득을 공간 필터 형태로 적용함으로써 간섭 신호를 완화한다. 단일 채널의 수신 신호와 배열 이득이 적용된 수신 신호를 Fig. 8에서 비교하였다. Fig. 8(a)는 수신 배열 중 12번째 단일 채널의 수신 신호로서 직접파와 해수면 반사파의 특성이 나타나며 신호 대 간섭 잡음비는 4.40 dB이다. 반면, Fig. 8(b)는 직접파 방향으로 빔을 조향한 후 배열 이득을 적용한 신호이며 직접파는 coherent 배열 이득으로 신호 세기가 증가하고, 간섭 신호들은 incoherent 이득이 적용된다. 신호 대 간섭 잡음 비 또한 21.61 dB로 기존의 신호보다 약 20 dB 향상되었다.
IV. 통신 성능
해상 실험의 채널응답특성은 직접파와 해수면 반사파가 나타나며 지연 시간은 약 10 ms로서 간섭 구간이 길어 통신 성능이 저하된다. 이에 제안된 공간 필터를 적용하여 통신 성능을 개선하고자 한다.
보상 구조로는 공간 필터를 이용하여 분리된 데이터 신호를 정합 필터를 통하여 기저대역으로 복조하고 프리앰블을 이용하여 동기화(synchronization)를 수행한다. 또한 최대 우도(Maximum Likelihood, ML)기반의 위상고정루프 알고리듬을 이용하여 위상을 추정[6]하고 보상하는 구조를 갖는다.
Fig. 9(a)는 공간 필터를 적용하기 전의 수신 신호의 성상도이며 비트오류율은 41.61 %이다. Fig. 9(b)는 본 논문에서 제안한 공간 필터를 적용하여 분리한 직접파 신호의 성상도이며 인접 심볼 간 간섭이 완화되었음을 확인 할 수 있다. 비트오류율은 22 %로 통신 성능이 향상되었으나, 위상 편이에 대한 문제는 회복되지 않았다. 따라서 최대 우도 알고리듬으로 추정된 위상[Fig. 10(a)]을 보상한 결과는 Fig. 10(b)와 같고 비트오류율은 0 %로 통신 성능이 향상됨을 보인다.
V. 결 론
수중음향전파는 해양 도파관 구조에 따라 다중경로 특성을 갖는다. 이는 인접 심볼 간 간섭을 발생시키며 통신 성능 저하의 주원인이 된다. 이러한 간섭을 완화하기 위하여 등화기 기법이 널리 사용되고 있으나, 채널 추정을 필요로 하며 시변동에 따라 등화기 알고리듬의 파라미터를 갱신해주어야 하는 복잡성이 따른다. 본 논문에서는 인접 심볼 간 간섭을 완화하는 방법으로 빔 형성 기반의 공간 필터를 제안하였다. 원하는 신호의 방향으로 빔을 조향하고 배열 이득을 수행함으로써 공간상의 신호를 분리하여 간섭을 완화한다. 본 논문에서 제안한 공간 필터를 실제 해상 실험 데이터에 적용하였으며, 공간 필터 적용 전의 단일 채널보다 배열 이득을 포함한 공간 필터 적용 후의의 신호 대 간섭 잡음비가 약 20 dB 향상되었고, 비트오류율은 22 %로 공간필터 적용전의 비트오류율(41.61 %)에 비하여 약 52 %의 향상을 보였다. 추가적으로 최대 우도 알고리듬을 기반으로 위상을 보상한 결과 비트오류율은 0 %로 통신 성능이 개선됨을 보였다.
