

I. 서 론
II. 모델링
2.1 배관 모델
2.2 마찰 지지대 모델
2.3 마찰에 의한 에너지 소산
III. 마찰지지대 위치 최적화
IV. 결 과
4.1 선형 지지대로 예측한 최적의 마찰 지지대 설치 위치
4.2 마찰 지지대의 진동 저감 효과
V. 결 론
I. 서 론
배관 진동은 산업 현장에서 흔하게 발생하는 현상이지만 배관의 수명을 단축시키고 파손, 누수 등과 같은 위험한 문제를 야기한다. 따라서, 진동은 배관계의 정상적인 동작을 위해 필수적으로 해결되어야 하는 문제이다. 하지만, 배관의 진동은 센서를 통한 직접적인 측정이 어려워 정확한 원인을 파악하기 힘든 경우가 많다. 또한, 밝혀낸 진동의 원인이 시스템 가동에 필수적인 부품인 경우 진동원을 제거할 수 없다는 문제가 발생한다.
이러한 이유로 연구자들은 배관 진동 문제를 식별하고, 효과적으로 해결하기 위해 수많은 연구를 수행했다. 그 중 배관의 진동을 발생시키는 주요 요인으로 배관 유동에 의한 진동에 대한 연구가 진행되어 왔다. Lee et al.[1]는 시뮬레이션과 실험 결과를 통해 배관 시스템에서 유체에 의한 진동이 기계적인 힘 못지 않게 중요한 진동 원인임을 증명하였다. Gorman et al.[2]은 유체의 힘을 불안정한 유체의 운동량 방정식과 연속 방정식을 이용하여 나타냈고, 수치적인 방법과 특성곡선법을 통해 배관의 비선형 응답을 예측하였다. Li et al.[3]은 전달행렬법을 사용하여 유체의 유동과 압력을 고려한 배관계의 지배 방정식을 찾았다. 또한 유체와 파이프 사이의 상호작용을 통한 파이프 고유 주파수의 변화를 발견하였다.
이 외에도 다양한 기계적인 원인에 의해 진동하는 배관 시스템을 조사한 연구들이 존재한다. Lee et al.[4]의 경우 가속도 데이터를 통해 로터리 압축기의 힘을 예측하였다. 또한, Matsuda et al.[5]의 경우 시뮬레이션 모델로 왕복동 압축기의 거동을 구현하였다. Lu et al.[6]은 배관 시스템에서 왕복 펌프와 관 내 유체에 의해 발생하는 불평형 힘을 예측하였다. Bai et al.[7]은 유량 조건에 따른 원심 펌프의 진동을 측정하여 입출구를 통과하는 유체의 양이 펌프에 미치는 진동 영향을 증명하였다.
한편, 배관 진동을 제어하는 장치에 대한 연구도 진행되었다. Kerkhof[8]와 Tan et al.[9]은 배관의 진동을 제어하기 위해 각각 점성 유체와 충격식 감쇠기를 활용하여 동조 질량 감쇠기(Tuned Mass Damper, TMD)를 개선하는 연구를 선보였다. Mamaghani et al.[10]은 조화 가진 속에서 배관에 부착된 비선형 에너지 싱크(Nonlinear Energy Sink, NES)의 응답 제어 능력을 연구하였다. 또한 NES 위치에 따른 성능 차이를 비교하고, 최적의 위치 예측 방법을 제시하였다. Duan et al.[11]는 2개의 평행한 NES의 진동 제어 성능을 연구하였는데, 갤러킨 방법을 통해 유속이 빠른 배관 시스템에서 평행하게 설치된 NES가 효과적임을 증명했다. Shokouhi et al.[12]는 점성 감쇠기의 내부 유체가 오리피스를 통과할 때 진동 에너지 발산하는 메커니즘을 이용하여 시스템의 진동을 제어하였다.
앞서 언급된 방법들 외에도 진동 제어에는 다양한 방법들이 존재한다. 하지만 대부분의 경우 많은 비용과 높은 설치 난이도를 요구한다. 반면, 마찰을 이용하여 진동 에너지를 소산 시키는 경우는 다른 방법에 비해 설치 난이도가 낮고, 제작에 비교적 적은 비용이 요구되며, 에너지 소산이 쉽다는 장점이 있다. 이러한 이유로, 몇몇 연구자들이 마찰에 의한 진동저감 방법의 장점을 활용하여 진동 저감 장치에 대한 연구를 진행하였다. Lopez와 Nijmeijer[13]는 마찰 모델에 따른 에너지 소산과 이를 최대화하는 연구를 수행하였다. 그들은 사례 연구를 통해 슬립 혹은 스틱 상태의 에너지 소산을 가장 잘 예측하는 스위치 모델을 발견했고, 최대 에너지 소산과 최적의 마찰력이 스트라이벡 속도와 감쇠 요소에 의존적임을 밝혀냈다. Lopez et al.[14]는 질량체와 움직이는 베이스 사이 마찰에 인한 에너지 소산을 연구했다. 그들은 슬립 모드와 스틱 모드에서 마찰력을 수식화하고, 영구적인 미끄러짐 모드가 발생하는 임계 주파수를 찾았다. 또한, 에너지 소산은 마찰 감쇠기의 영구적인 미끄러짐 구간에서 최대화되고, 감쇠기의 질량이 무거울수록 증가함을 밝혔다. 한편, Barzegar et al.[15]와 Jarrahi et al.[16]은 시스템의 응답을 제어하기 위해 마찰을 적용한 진동 저감 장치를 설계하였다. Barzegar et al.[15]는 감쇠기의 캠으로 마찰면에 작용하는 수직 압력을 조절하여 마찰력을 제어하는 실험을 진행하였다. 또한 캠의 형상을 변경하여 감쇠기의 마찰력과 히스테리시스 동작을 조절하였다. Jarrahi et al.[16]은 감쇠기에 설치된 플레이트의 회전으로 마찰을 발생시켜 시스템을 안정화 하였다. 추가로, 그들은 설계 변수의 최적화를 통해 회전 마찰 감쇠기의 진동 저감 효과를 극대화하였다. Beards[17]는 구조물에 감쇠기를 추가하는 방법으로 조인트 감쇠기를 소개했다. 그는 조인트 감쇠기가 마이크로 슬립상태에서 시스템의 진동 에너지를 발산한다고 설명하였다. 또한 감쇠기의 성능이 마찰면에 작용하는 결속력에 큰 영향을 받음을 알아냈다.
마찰로 진동을 제어하려는 접근은 배관 시스템에도 적용되었는데, 대표적인 예로 마찰 지지대가 있다. 마찰 지지대는 배관의 자중을 접촉에 필요한 수직하중으로 사용한다는 특징이 있다. 또한 마찰 지지대는 구조적으로 단순하면서도 우수한 진동 저감 효과를 가지는 이점이 있다. 이에 몇몇 연구자들이 마찰 지지대가 설치된 배관계의 응답을 해석함으로써 마찰 지지대의 진동 저감 효과를 증명하였다. Kobayashi et al.[18]는 실험을 통해 배관 시스템에서 마찰 지지대의 진동 저감 효과를 증명하였다. 그들의 연구에서 마찰 지지대는 수직 기둥과 마찰면으로 구성되고, 가진 테이블에 의해 배관 시스템이 진동한다. 또한, 스페이서와 브레이스를 통해 마찰 지지대의 접촉력과 강성을 조절하였다. 그 결과, 브레이스가 없는 마찰 지지대에서 가장 우수한 성능을 가짐을 관측하였다. Bakre et al.[19]은 다방향의 가진 조건에서 마찰 지지대의 성능을 연구하였는데, 수치적분기법을 사용하여 마찰지지대의 비선형 거동을 예측하였다. 또한 수치시험을 통해 방향이 다른 두 마찰력 사이의 상호작용으로 인한 에너지 소산의 감소를 발견했다. 그리고 실험을 통해 마찰 지지대의 진동 저감 효과를 증명하였다. Arguelles & Casanova[20]는 마찰 지지대가 설치된 배관의 조화 응답을 Hybrid Frequency-Time(HFT) 방법을 통해 해석하였다. HFT에는 지지대가 받는 수직방향 하중이 변하지 않아야 한다는 전제 조건이 필요하다. 그들은 연구에서 비선형 힘과 시스템의 응답은 모두 정상상태에서 주기성을 가진다고 가정하고, 주기적인 힘과 응답을 푸리에 계수를 통해 표현하여 배관계의 지배 방정식을 찾았다. 그리고 수치해석적 방법과 파월 방법을 통해 시스템의 응답을 예측하였다. 동시에 그들은 배관계에 설치된 마찰 지지대의 진동 저감 효과를 확인하였다.
현재까지 진행되었던 마찰 지지대 관련 연구는 마찰을 이용한 진동 저감 효과와 성능 해석하는 것에 집중하였다. 하지만, 마찰 지지대의 경우 설치 위치에 따라 배관계의 진동 저감 성능이 크게 좌우되는 특징이 있다. 따라서, 본 연구에서는 마찰 지지대 설치 위치에 따른 진동 저감 성능을 비교하고, 전체 배관 시스템의 진동을 저감하기 위한 마찰 지지대 위치 선정 방법을 소개한다.
본 논문은 서론을 포함하여 총 5개의 장으로 구성되어 있다. 2장에서는 해석에 사용된 유한요소모델과 에너지 소산에 대해 정의하고, 3장에서는 선형해석으로 마찰 지지대 성능을 예측하는 접근법을 제시한다. 4장에서는 제안된 접근법으로 예측한 설치 위치를 보여주고, 마찰 지지대 성능 비교를 통해 접근법의 타당성을 증명한다. 마지막 5장에서는 연구의 결론을 정리하였다.
II. 모델링
2.1 배관 모델
연구에 사용된 배관계 모델은 직경 0.2191 m인 파이프로 설계되었으며, 배관계의 양 끝단이 고정되어 있다. 파이프의 곡선관은 반경 0.05 m로 90°로 구부러져 있다. 배관계 모델에 사용된 좌표축은 XY 평면이 지면과 평행하고 지면에 수직한 방향으로 Z 축을 정의하였다. 그리고 밸브와 같은 집중된 질량을 묘사하기 위해 두 개의 집중 질량을 배관에 설계하였다. 또한, 공장이나 발전소에서 유체의 흐름을 위해 배관에 기울기를 반영하여 설계하는 것이 일반적이므로 지면과 평행한 방향으로 설치되어 있는 배관은 지면과 2°의 기울기를 가지게 설계하였다.
배관의 유한 요소 모델은 ANSYS를 통해 모델링 되었으며, 배관의 직선관과 곡선관을 표현하기 위해 PIPE 288과 ELBOW 290 요소를 사용하였다. 배관 모델은 125개의 요소로 구성되어 있으며, 총 432개의 자유도를 가진다. 배관계에 작용하는 외력은 크게 유체에 의한 영향과 배관계와 연결되어 있는 구조물에서 전달되는 외력으로 나눌 수 있다. 따라서, 배관의 유한 요소 모델에서 유체에 의한 영향은 곡관부를 주기적인 힘으로 가진하는 것으로 단순화하고, 압축기와 같은 주변 구조물의 진동을 추가하기 위해 배관의 끝단을 X방향으로 가진하였다.
본 연구에서는 실제 발전소에서 사용되고 있는 배관을 모사하여 해석 모델의 구속 조건을 설정하였다. 지지대는 일반적으로 배관의 무게나 집중 하중으로 인해 처짐이 발생하는 부위에 설치한다. 따라서, 해석에 사용된 배관 모델도 처짐이 발생하거나 집중 하중이 발생하는 곳에 지지대를 설계하였다. 또한, 횡방향 진동에 취약할 것으로 예상되는 3, 4번 지지대에는 추가로 구속 조건을 부여하였다. 배관 모델의 형상과 지지대의 구속 방향은 Fig. 1과 Table 1에 정리되어 있다.
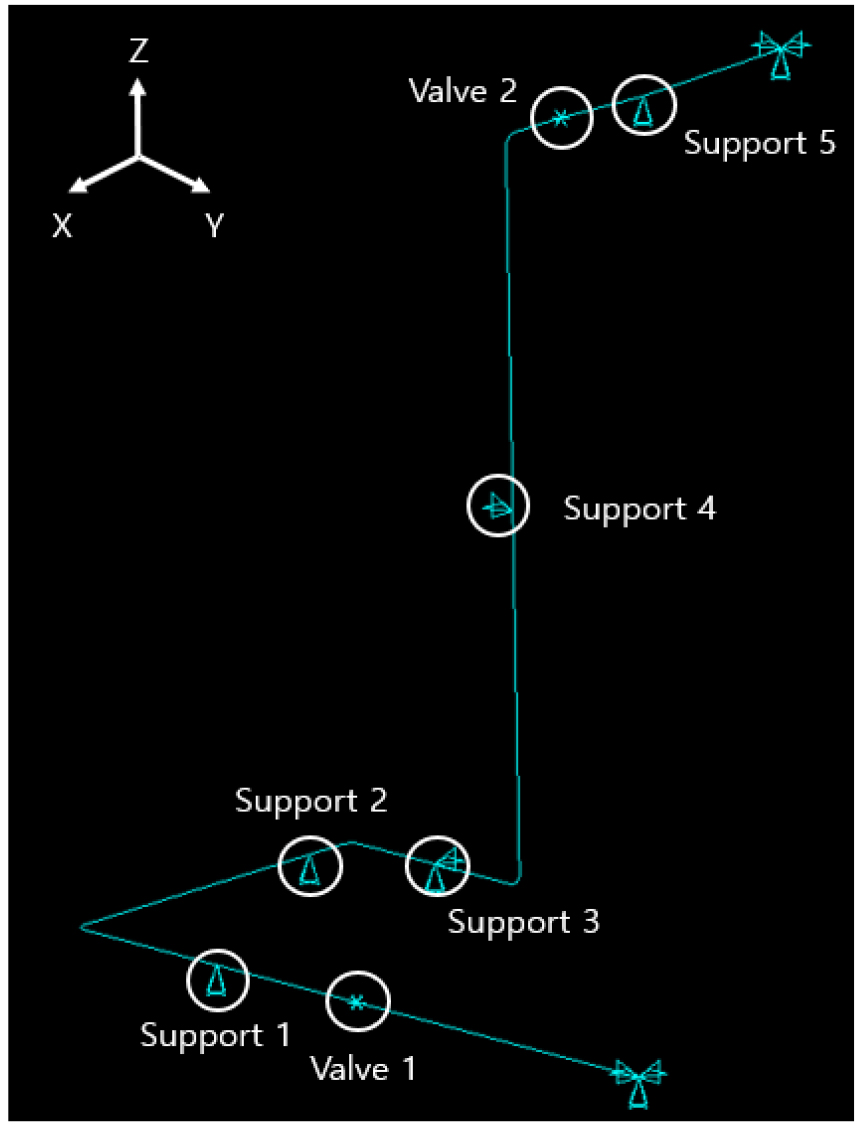
Table 1.
The constraint direction of support.
| Support number | 1 | 2 | 3 | 4 | 5 |
| Constraint direction | Z | Z | X, Z | Y | Z |
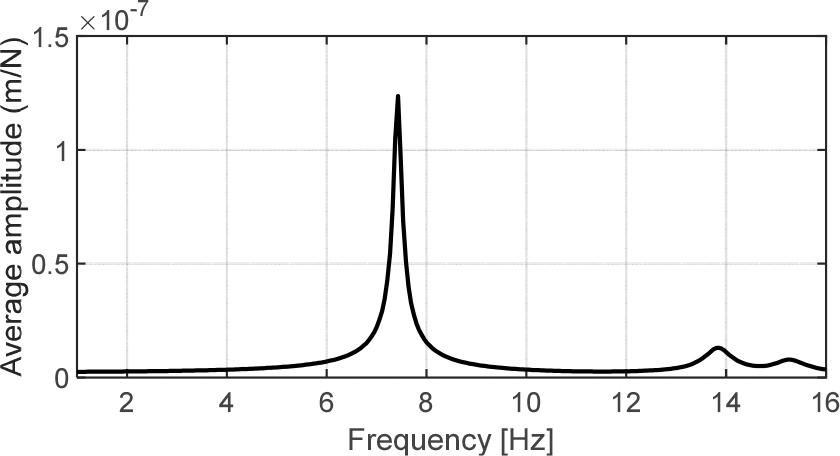
기계적인 가진원과 유체 흐름에 의해 진동하는 배관 시스템의 응답을 알아보기 위해 주파수 응답 해석을 수행하였고, 그 결과를 Fig. 2에 나타냈다. Fig. 2에서 X축은 가진 주파수를 의미하고, Y축은 배관 시스템의 평균 변위를 뜻한다. Fig. 2를 통해 첫 번째 고유 주파수(7.47 Hz)에서 가장 큰 변위를 발생하는 것을 확인하였고, 이를 토대로 배관에 가진 주파수를 선정하였다.
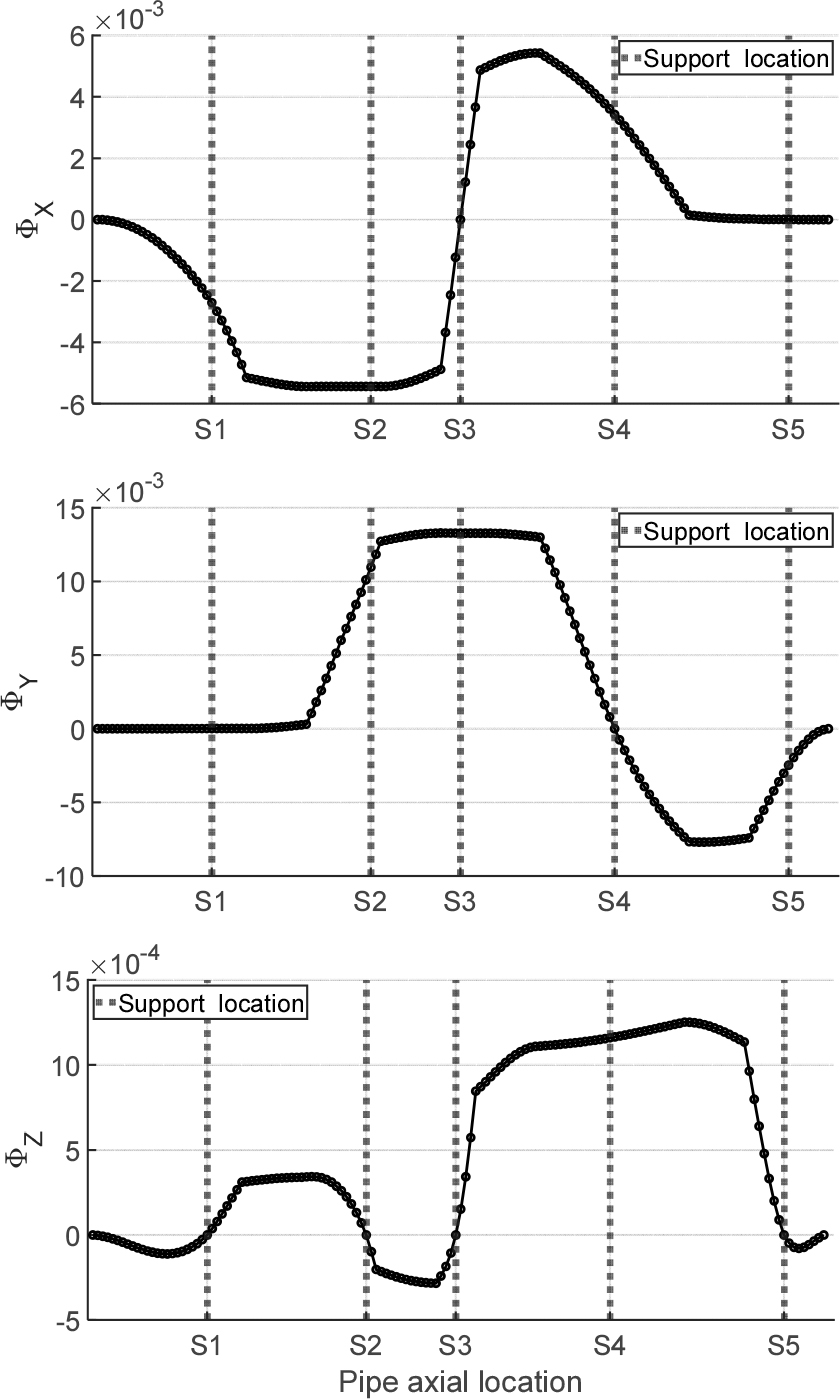
첫 번째 모드 형상은 Fig. 3에서 확인할 수 있다. 배관의 길이 방향에 따라 모드 형상을 나타내었고, X축의 S1 ~ S5은 지지대의 위치를 뜻한다. Y축 방향에 대한 모드 형상()이 상대적으로 더 큰 값을 가지며, 그 중 모드 변위가 가장 큰 3번 지지대에 진동 저감 장치를 설치하는 것이 시스템의 진동을 제어하는데 효과적이라 예상된다.
배관 구조물의 감쇠는 질량 비례항과 강성 비례항의 합으로 표현되며 Rayleigh 감쇠를 사용하였다. Eq. (1)에서 M, K는 각각 시스템의 질량 행렬과 강성 행렬을 의미하고, 이 때 𝛼, 𝛽 값은 각 항의 비례 계수를 의미한다. 배관 시스템에서 대부분의 작동 주파수는 낮은 주파수 영역이므로 강성 비례 감쇠 효과만 고려하였다.
강성 비례 감쇠비는 𝜁 = 0.01를 적용하여 계산하였다.
2.2 마찰 지지대 모델
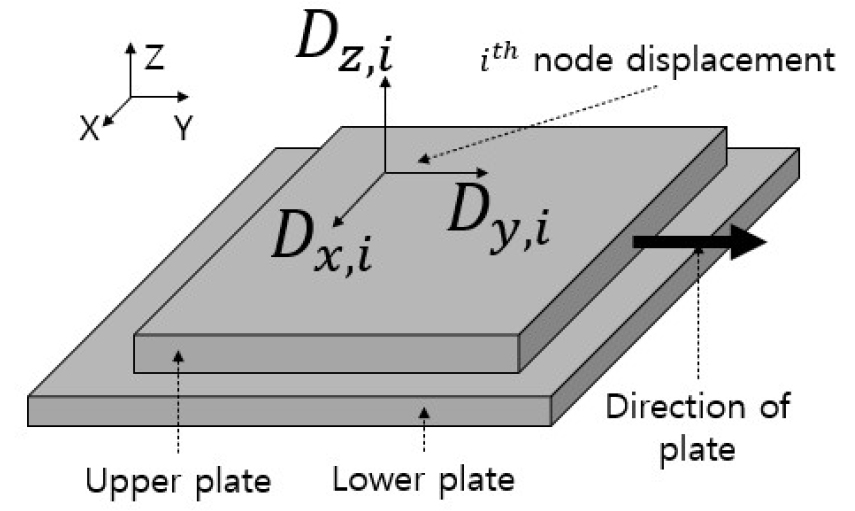
마찰 지지대는 배관을 지지하는 배관지지대와 마찰판으로 구성되어 있다. Fig. 4에서 마찰 지지대는 기존의 배관 지지대와 달리 지지대가 지면에 고정되어 있지 않고 마찰면으로 구속되어 있다. 따라서 마찰판에 평행한 방향으로 하중에 의해 변위가 발생한다. 본 연구에서 마찰은 쿨롱 마찰 모델을 따르고, 마찰면에서 부분적인 스틱슬립이 발생하는 마이크로슬립을 가정하여 해석을 진행하였다. Fig. 5는 1번 지지대 위치에 마찰 지지대를 설치하고 첫 번째 고유 진동수로 배관을 진동시켰을 때 주기에 따른 마찰면의 접촉 상태를 나타낸다. 마찰면을 마이크로슬립을 고려하여 모델링한 결과 마찰면의 접촉 상태가 스틱/슬립/분리로 나뉘어 나타나는데 이를 붉은색, 주황색, 노란색으로 구분하여 가시화하였다. 마이크로슬립 모델에서 접촉면은 탄성체로 취급되고, 면에 작용하는 수직 하중의 불균일한 분포를 허용한다. 따라서, 접촉면 위 노드들은 작용하는 수직 하중에 따라 개별적으로 마찰 법칙을 따르게 되고 위치 별로 접촉 상태에 차이가 발생하게 된다. 외력에 따른 마찰면의 접촉 상태 변화를 나타내기 위해 진동 주기에 따른 배관의 운동방향을 화살표로 표시하였고, 배관의 속도가 0인 경우는 점으로 나타내어 구분하였다.
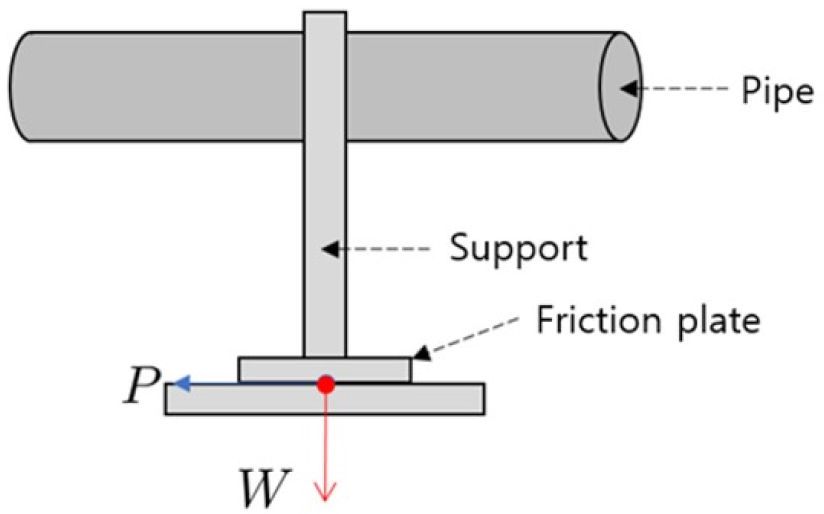
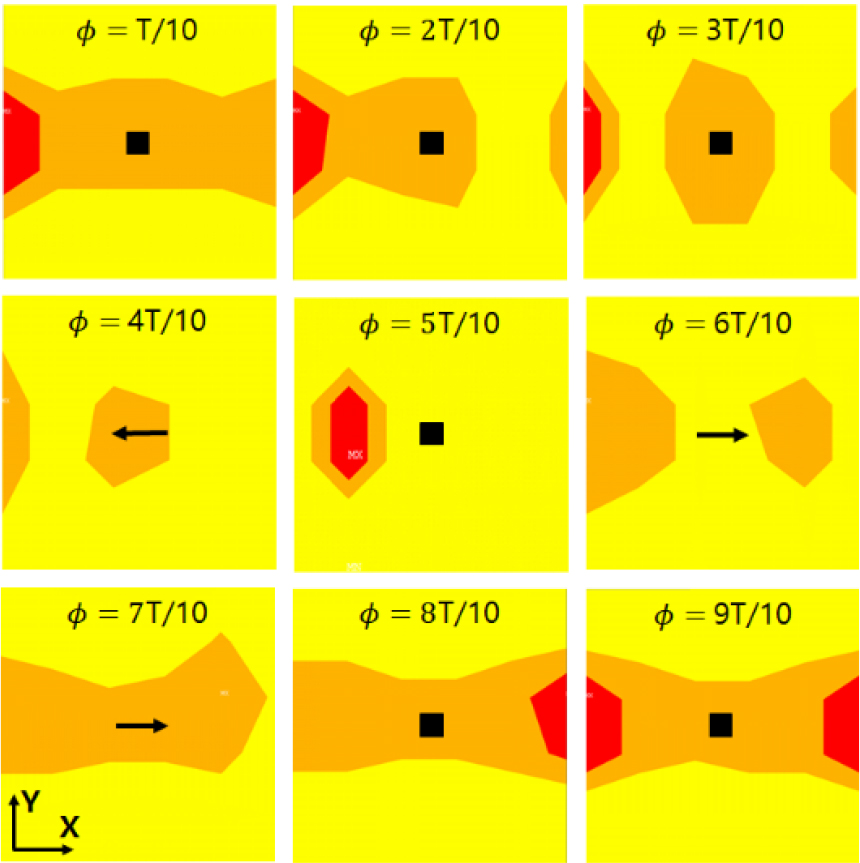
마찰판의 마찰력은 배관을 통해 전달되는 외력의 크기에 의해 결정되는데, 마찰판 사이의 접촉지점에서 작용하는 힘(P)이 마찰력(μW)보다 작은 경우 스틱 현상이 발생하여 변위가 제한되고, 큰 경우는 슬립 현상이 유도되어 에너지 소산을 발생시킨다.
한편, 접촉면에 수직한 방향의 움직임은 마찰 지지대가 설치된 위치에 따라 달라진다. 연구에 사용된 모델을 기준으로 마찰 지지대가 지면에 설치된 경우, 마찰 표면은 XY 평면에 설치되어 Z축 음의 방향의 거동을 제한한다. 그러나 수직관에 지지대가 설치된 경우 마찰면은 XZ 평면에 설치되어 Y축 음의 방향의 거동을 제한한다.
2.3 마찰에 의한 에너지 소산
마찰 지지대 최적 설계와 성능 평가를 위해서는 마찰면에 발생하는 에너지 소산 양을 예측해야 한다. 따라서, 본 연구에서는 에너지 소산을 계산하기 위해 지지대 접촉면에 분포해 있는 N개의 노드에서 마찰력에 의한 일을 다음과 같이 정의한다.
Eq. (4)에서, N은 접촉면 위 노드의 전체 개수를 의미하고, i는 접촉 노드 번호를 의미한다. 그리고, 는 i번째 노드에 작용한 마찰력을 의미하고, D는 접촉 노드의 변위 구간을 의미한다. 배관에 주기적인 힘이 작용한 경우, 주기 T에 따른 에너지 소산의 평균값은 다음과 같다.
Eq. (5)에서 음의 부호는 에너지 손실을 의미한다. 조화 가진 조건에서 에너지 소산은 외력 주파수의 함수로 표현되며, 이를 통해 마찰 지지대의 성능이 외력에 따라 달라짐을 예측할 수 있다.
III. 마찰지지대 위치 최적화
마찰 지지대의 성능은 설치 위치에 따라 크게 변화한다. 따라서, 설치 위치에 따른 마찰 지지대의 성능을 정확하게 비교하기 위해서는 모든 경우에 대해 시간계열 해석(Time Domain Analysis, TDA)을 수행해야 한다. 그러나, 해당 방법은 마찰의 비선형성으로 인해 많은 시간이 요구되기 때문에 효율적인 방법이 아니다. 따라서, 본 연구에서는 선형 해석으로 마찰 지지대의 성능을 빠르게 예측하는 방법을 소개한다.
마찰 지지대의 진동 감쇠 성능은 마찰면에서 발생한 에너지 소산의 크기로 결정된다. 마찰에 의한 에너지 소산은 접촉 노드 사이의 상대변위가 발생하는 슬립상태에서 발생하며, 상대변위가 발생하지 않는 스틱상태에서는 마찰력에 의한 에너지 소산이 발생하지 않는다. 또한, 접촉 상태에 있던 노드가 서로 분리되면 마찰력이 초기화 된다. 따라서, 마찰에 의한 에너지 소산을 발생시키기 위해서는 마찰 접촉 노드 사이의 슬립은 발생시키고 스틱 및 분리현상은 유도되지 않는 거동이 필요하다.
마찰판 사이의 마찰력이 없는 조건(μ = 0)에서는 선형계산을 통해 마찰지지대를 포함한 배관계의 주파수 응답해석이 가능하다. 이때 마찰판 사이의 접촉 노드들의 상대 움직임을 조사하여 실제 마찰이 있는 경우의 스틱/슬립/분리 상태를 추정해 본다. 마찰판은 마이크로 슬립 모델을 사용하였기 때문에 마찰력이 없는 접촉면에 존재하는 모든 노드들을 상대로 상대 변위의 분포를 조사하였다.
Fig. 6의 좌표축을 기준으로 i번째 접촉 노드가 접촉면에 평행한 방향(XY 평면)으로 이동한 변위벡터는 로 표현하였고, 수직 방향의 변위(Z축 방향)는 로 나타내었다. 주파수 응답 해석을 통해 주파수 에 대한 진폭을 Eqs. (6)과 (7)을 통해 구하였다.
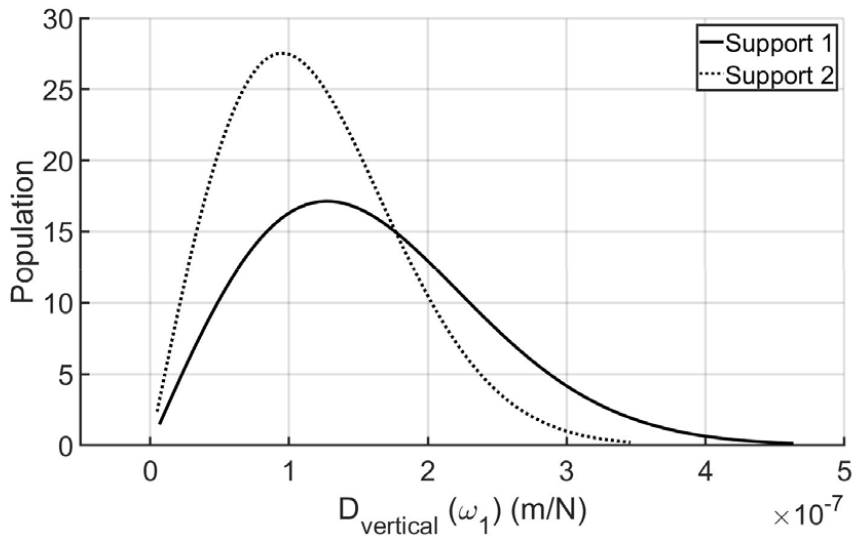
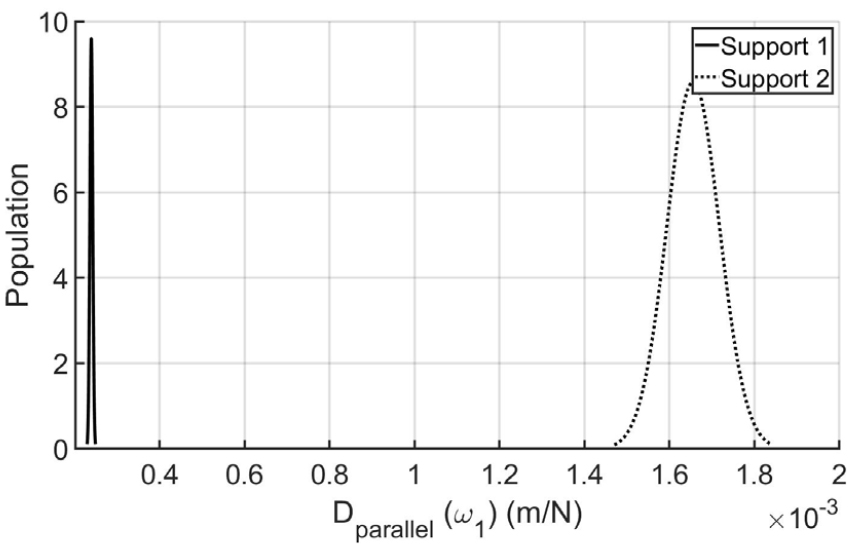
가진 주파수마다 마찰면에서 발생하는 노드 변위의 분포를 조사하고 슬립이 발생 가능성에 대한 경향성을 파악할 수 있다. Fig. 7은 1번과 2번 위치에 마찰 지지대를 설치하였을 때, 첫 번째 고유 주파수에서 접촉면이 최대 변위일 때 접촉 노드들의 수직 방향 응답 분포를 나타낸다. 그래프의 가로축은 접촉 노드의 수직 방향 변위의 크기이고, 세로축은 노드 수를 의미한다. Fig. 7에서 두 형상을 비교했을 때, 2번 지지대 분산 정도가 작고, 변위 값들이 0에 가깝게 치우쳐 있음을 알 수 있다. 이는 2번 지지대 위치에서 접촉면 사이의 분리가 적게 발생함을 의미한다. 또한, 접촉면 사이의 연속적인 접촉은 마찰 지지대의 에너지 소산양을 증가시키므로 2번 위치에서 접촉상태를 유지할 경향성이 더 클 것으로 예상할 수 있다. Fig. 8은 Fig. 7과 동일한 조건에서 접촉 노드들의 수평 방향 응답 분포를 나타낸다. Fig. 8에서는 Fig. 7과 반대로 1번 지지대의 분산 정도가 작고, 변위 값들이 0에 가깝게 치우쳐 있음을 알 수 있다. 이는 1번 지지대 위치에서 접촉면 사이의 상대 변위가 거의 발생하지 않음을 의미한다. 두 접촉면 사이 상대 운동의 크기는 마찰 지지대의 에너지 소산양과 비례하므로 1번 위치에서 마찰 지지대의 성능이 우수하지 못할 것으로 예측된다. 따라서, 접촉면 사이의 분리가 적고, 수평 방향 상대 변위가 큰 2번 위치에 마찰 지지대를 설치하는 것이 가장 적합하다고 판단할 수 있다.
IV. 결 과
4.1 선형 지지대로 예측한 최적의 마찰 지지대 설치 위치
경계조건과 가진 조건에 의해 선형 지지대의 거동은 슬립 상태의 마찰 지지대의 거동과 유사하다. 따라서, 주파수 응답 해석으로 구해진 선형 지지대의 거동을 통해 정상상태에서 마찰 지지대의 성능을 예측한다. 우선, 접촉면에 수직한 방향의 선형 지지대 거동으로 마찰 지지대의 분리를 예측한다. Fig. 9에서는 첫 번째 고유 주파수에서 선형 지지대 위치에 따른 접촉 노드의 변위 값들을 분포도 형태로 나타냈다. Fig. 9의 가로축은 선형 지지대의 설치 위치를 나타내고, 세로축은 접촉 노드들의 수직 방향 움직임이고, 가진력에 대해 정규화시킨 값을 나타낸다. Fig. 9에서 파란 사각형의 윗변과 아래변은 각각 분포의 상위 25 %와 75 % 지점을 나타내고, 두 변 사이의 거리를 사분범위라고 한다. 검은 가로선은 분포의 최대값과 최소값을 의미하며, 각각 파란 사각형의 윗변과 아래변을 기준으로 사분범위의 1.5배 떨어져 있는 값을 의미한다. 마지막으로 붉은 가로선은 분포의 중앙값을 나타내고, 붉은 십자 모양은 분포의 최대값과 최소값을 벗어난 이상점(outlier)을 나타낸다.
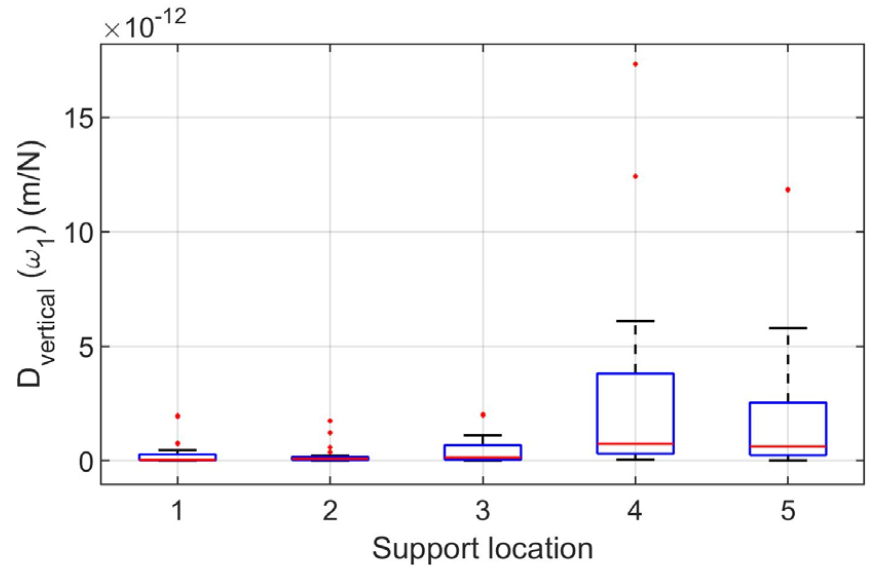
Fig. 9를 통해 2번 위치에서 접촉 노드들의 변위가 가장 0에 밀집해 있음을 알 수 있다. 이는 선형 지지대의 변위가 가장 작게 발생함을 의미한다. 또한 1, 3번 위치에서의 변위가 서로 유사한 분포를 가지며, 선형 지지대의 변위가 두 번째로 작게 발생함을 예상할 수 있다. 반면, 4, 5번 위치에서는 변위 분포의 중앙값은 0에 가까우나, 1 ~ 3번 위치와 달리 변위의 분포가 넓게 퍼져 있다. 선형 지지대에서 접촉면에 수직한 방향의 변위가 0에 가깝다는 것은 마찰 지지대가 가진 조건에서 접촉면 사이의 분리가 적게 일어남을 의미한다. 따라서, 지지대 위치에 따른 변위 분포의 중앙값만 고려했을 경우 모든 지지대 위치가 마찰 지지대를 설치하기에 적합하다고 판단할 수 있다. 하지만, 변위의 분포를 고려했을 때 비교적 넓은 분포를 가지는 4, 5번 지지대 위치는 마찰 지지대를 설치하기에 적합하지 못하다고 판단된다.
접촉면에 평행한 방향의 선형 지지대 거동으로 마찰 지지대의 상대 변위를 예측한다. Fig. 10에서는 첫 번째 고유 주파수에서 선형 지지대 위치에 따른 접촉 노드의 변위 값들을 분포도 형태로 나타냈다. Fig. 10을 통해 3번 지지대 위치에서 접촉면 방향의 변위가 가장 크게 발생하고, 2, 5, 1, 4번 순으로 변위의 크기가 감소함을 알 수 있다. 선형 지지대에서 접촉면에 평행한 방향의 변위가 크다는 것은 슬립 상태에서 마찰 지지대의 상대 변위가 크게 발생함을 의미한다. 따라서, 3번 위치에 마찰 지지대를 설치할 경우 진동 에너지를 가장 많이 발산할 것으로 예상되며, 마찰 지지대를 설치하기에 적합하다고 판단된다. 반면, 4번 위치에서 마찰 지지대가 가장 나쁜 성능을 보여줄 것으로 예상되기 때문에 마찰 지지대를 설치하기에 부적합하다고 판단된다.
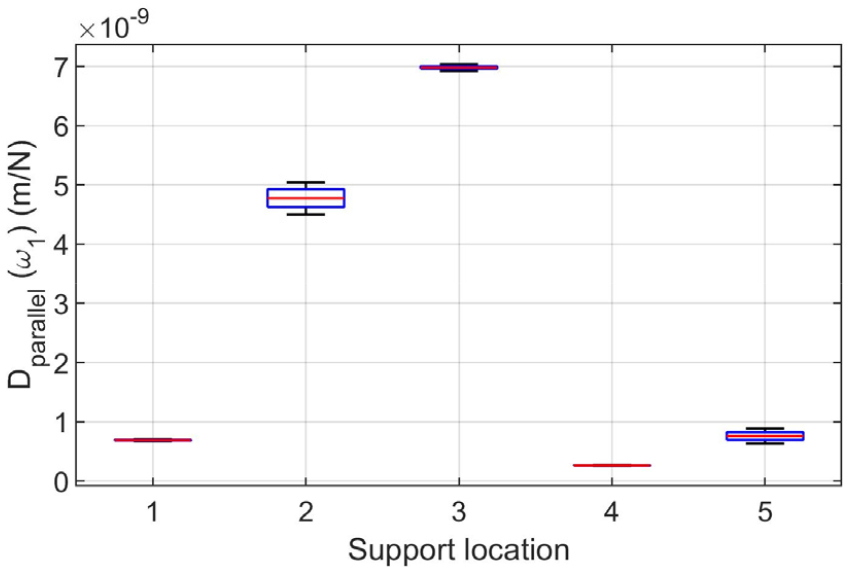
선형 지지대의 거동을 통해 예측한 최적의 마찰 지지대 설치 장소는 3번 위치이고, 2, 1, 5, 4번 순으로 마찰 지지대를 설치하기에 적합하다고 판단된다.
4.2 마찰 지지대의 진동 저감 효과
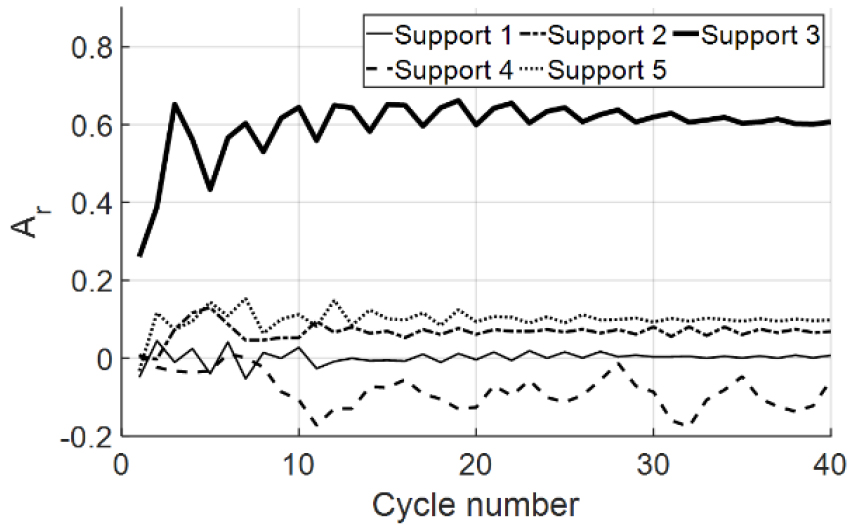
마찰 지지대 설치 위치에 따른 성능을 비교하기 위해 각 위치에 대해 시간 영역 해석을 수행했다. 그리고, 마찰 지지대의 성능을 정량화하기 위해 마찰 지지대 설치 전 배관에서 최대 변위가 발생한 곳의 응답 변화율을 Eq. (8)에서 응답비(Amplitude Ratio, Ar)로 정의한다. Eq. (8)에서 는 배관에서 발생한 최대 변위 벡터의 크기를 뜻하고, 과 는 각각 마찰 지지대 설치 전과 후 배관의 응답을 의미한다. 응답비가 양수인 경우는 마찰 지지대로 인해 배관 응답이 감소함을 의미한다. 반대로, 응답비가 음수인 경우는 마찰 지지대로 인해 배관의 응답이 증가함을 뜻하고, 이는 마찰 지지대가 배관계에 악영향을 미침을 의미한다. 한편, 응답비가 0인 경우 마찰 지지대가 배관 응답에 아무런 영향도 미치지 않음을 의미한다.
Fig. 11 에서는 마찰 지지대의 설치 위치 별로 주기에 따른 배관의 최대 응답의 변화를 보여준다. 그래프의 세로축은 배관 응답의 감소율을 의미하고, 그래프의 가로축은 가진 주기를 의미한다. Fig. 11을 통해 마찰 지지대의 성능이 3, 5, 2번 순으로 우수하며, 1번 지지대는 배관 진동 제어에 영향을 주지 못함을 알 수 있다. 반면, 4번 지지대의 경우 응답비가 음수로 마찰 지지대가 배관의 최대 응답을 증폭시킴을 알 수 있다. 이 결과는 4번 지지대가 설치된 배관의 특성과 관련이 있다. 4번 지지대는 수직관에 설치되어 있어 연속적인 접촉에 필요한 수직하중이 존재하지 않는다. 따라서, 지지대의 두 마찰면이 외력에 의해 쉽게 분리되고, 이로 인해 마찰에 의한 진동 저감 효과가 크게 떨어지게 된다.
배관계에서 특정 지점의 응답 감소가 전체 시스템에서의 마찰 지지대 성능을 대표하는 것은 합리적이지 못하다. 따라서, 지지대 위치별로 마찰면에 의해 안정화된 진동 에너지 양을 비교함으로써 전체 시스템에서 마찰 지지대의 성능을 평가하였다. Fig. 12는 마찰 지지대 설치 위치에 대한 주기 별 마찰 소산 에너지를 나타낸다.
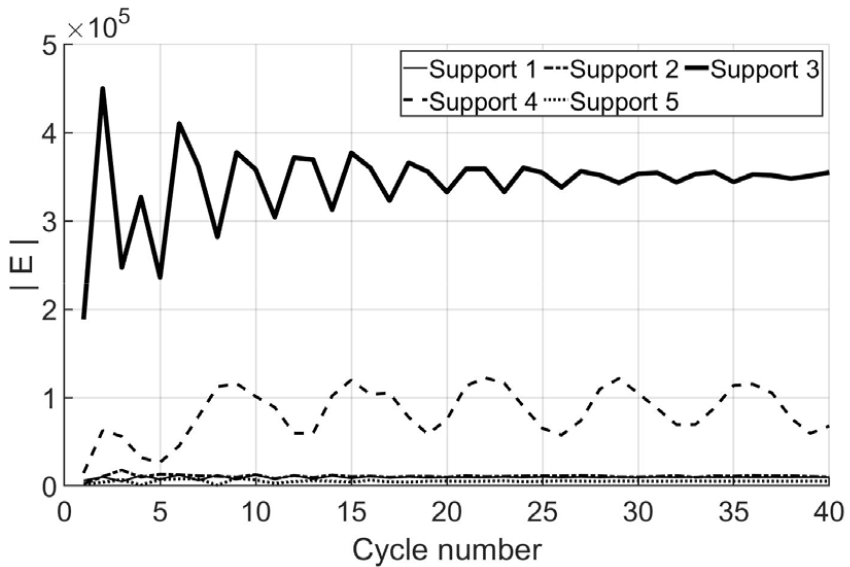
Fig. 12에서 세로축은 마찰에 의해 소산된 에너지를 의미하고, 가로축은 가진 주기를 의미한다. Fig. 12을 통해 마찰 지지대에서 발산한 에너지는 3번 지지대에서 가장 크고, 4번 지지대에서 두 번째로 큰 값을 가짐을 알 수 있다. 다른 지지대 위치와 달리 3, 4번 지지대의 경우 에너지 소산의 수렴 상태가 좋지 못한데, 이는 시스템의 가진 조건과 연관되어 있다. 3, 4번 지지대에는 접촉면에 수직한 방향으로 주기적인 힘이 작용한다. 이는 접촉면 사이의 분리를 야기하고, 에너지 소산 양이 특정 값으로 수렴하는 것을 방해한다. 특히, 4번 지지대의 경우 두 마찰면의 연속적인 접촉을 위한 수직하중이 부재하기 때문에 에너지 소산의 수렴 상태가 가장 나쁜 것을 확인할 수 있다. 한편, 1, 2, 5번 지지대의 경우 앞서 언급된 두 지지대에 비해 에너지 소산의 값이 현저히 낮음을 관측할 수 있고, 그 중 5번 지지대에서 가장 적은 에너지가 소산됨을 알 수 있다. 그러나, 1, 2, 5번 지지대의 경우 접촉면에 수직한 방향의 힘에 영향을 적게 받기 때문에, 20 번째 주기 이후에는 에너지 소산 값이 거의 변하지 않음을 관측할 수 있다.
위 결과들을 통해 응답 감소율과 에너지 발산 측면에서 탁월한 성능을 보여준 3번 지지대 위치가 마찰 지지대를 설치하기에 최적의 장소라고 판단된다. 그리고, 1, 2, 5번 지지대 위치의 경우 응답 감소율과 에너지 발산 측면에서 배관 시스템에 긍정적인 효과를 가지므로 마찰 지지대를 설치하기에 적절하다고 판단된다. 반면에, 4번 지지대 위치의 경우 뛰어난 에너지 소산 잠재력을 갖추고 있으나, 배관의 최대 응답을 증폭시켜 시스템을 불안정하게 만든다. 따라서, 4번 지지대 위치는 마찰 지지대를 설치하기에 부적합하다고 판단된다.
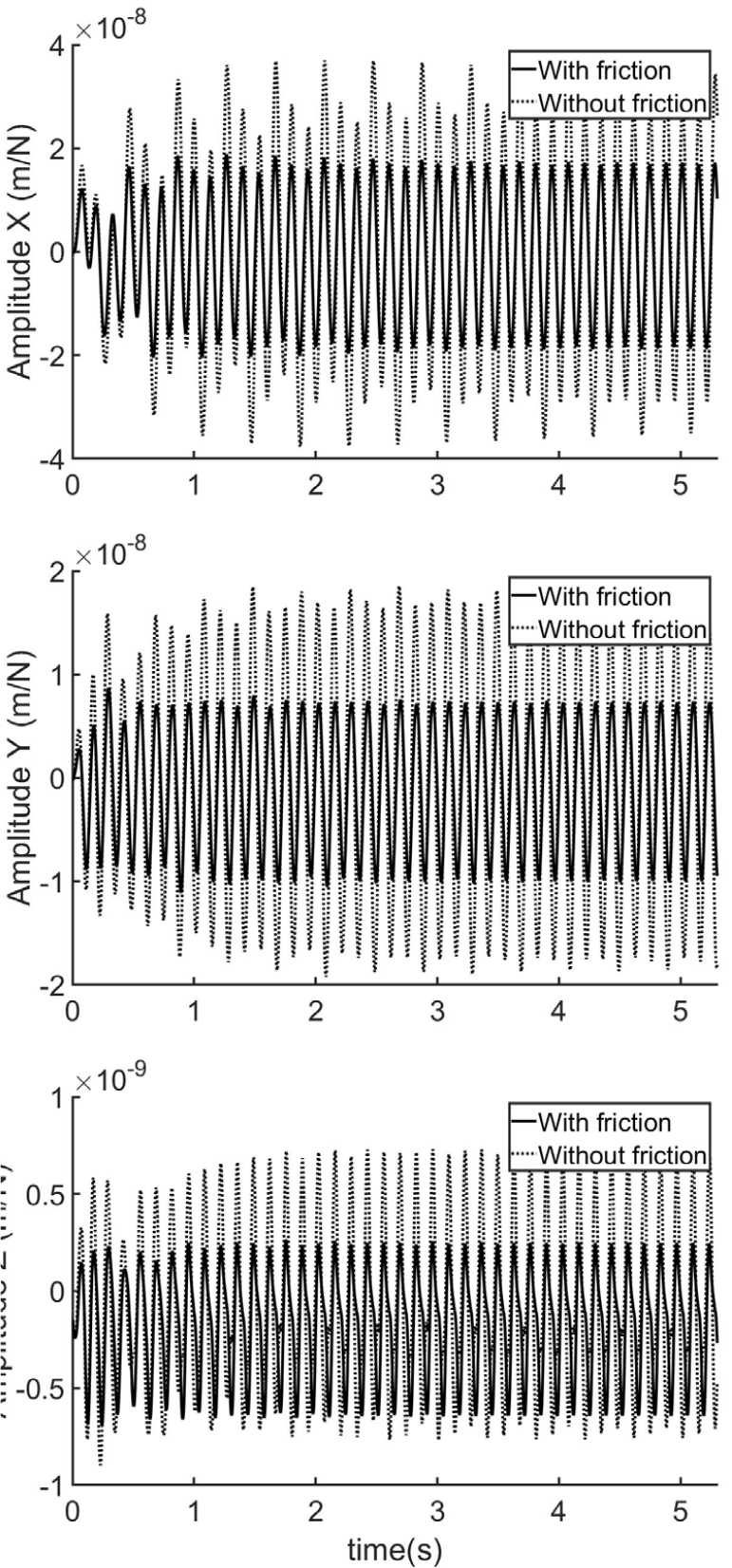
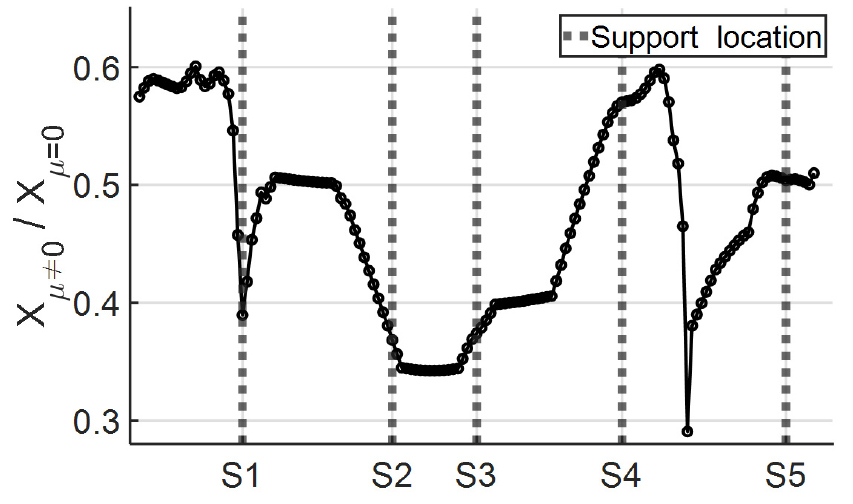
3번 지지대 위치에 마찰 지지대를 설치한 경우의 진동 감쇠 성능을 검증하기 위해 시계열 해석 결과와 배관 모델의 모든 노드에 대한 변위 저감율을 Fig. 13과 Fig. 14에 각각 나타내었다. Fig. 13은 시계열 해석 후 마찰 유무에 따른 배관 시스템 최대 응답의 변화를 비교한 그래프이다. 마찰이 있는 경우 없는 경우에 비해 진폭이 최대 40 %까지 줄어든 것이 확인된다. Fig. 14는 배관 모델에 마찰이 있는 경우의 진폭()과 마찰이 없는 경우의 진폭()의 비를 나타낸 그래프로 배관 모든 노드에 대한 진동 저감 효과를 효과적으로 보여준다. Fig. 14를 통해 1번 지지대 부근에서 마찰 지지대 효율의 갑작스런 변화를 확인할 수 있는데, 이는 1번 지지대의 Z 방향 구속으로 의해 부분적으로 감쇠효율이 증가했기 때문이다. 한편, 4번 지지대 부근에서는 수직관에서 주기적인 분리(separation) 현상이 발생하여 마찰 지지대의 효율이 감소함을 확인할 수 있다.
V. 결 론
본 연구는 배관 시스템에서 마찰 지지대의 진동 제어 성능을 정량적으로 증명하였다. 그리고, 비선형 해석없이 최적의 마찰 지지대 설치 위치를 예측하는 방법을 제안했고, 그 타당성을 증명하였다. 이번 연구를 통해 얻은 결론은 다음과 같다.
(1) 배관의 응답 감소율과 에너지 소산을 통해 최적의 위치에 설치된 마찰 지지대는 배관계의 진동을 효과적으로 감소시킴을 확인하였다.
(2) 마찰 지지대의 진동 제어 성능은 설치 위치에 따라 달라지는데, 특정 조건에서는 마찰 지지대가 배관 시스템의 응답에 악영향을 미치는 것을 확인하였다. 특히, 수직관의 경우 마찰 지지대보다 기존 지지대를 사용하여 배관을 지지하는 것이 구조 안정성 측면에서 더 적합하다고 판단된다.
(3) 선형 지지대를 활용한 예측방법을 통해 기존 지지대를 대신하여 마찰 지지대를 설치할 때 최적의 지지대 설치 위치를 비선형 해석 없이 빠르게 찾을 수 있음을 확인하였다. 또한, 선형 지지대를 활용한 예측방법은 배관 시스템의 설계 단계에서 마찰 지지대의 성능을 미리 예측할 수 있는 설계 가이드로 활용될 수 있다.
(4) 본 연구는 하나의 마찰 지지대에 대한 위치 최적화를 수행하였다. 그러나, 마찰 지지대 설치 개수는 시스템의 경계조건에 직접적인 영향을 주기 때문에 해석에 있어서 중요한 변수이다. 따라서, 향후 연구에서 다수의 마찰 지지대를 설치할 경우 대한 연구를 수행할 예정이다.
