

I. 서 론
II. DIFAR 소노부이 채널 구조와 신호 표현
III. 제안 기법
3.1 모호성 지도를 이용한 표적위치추정
3.2 모호성 지도 구현
IV. 실험 결과
4.1 실험 설정
4.2 주변소음의 영향
4.3 전파경로의 영향
4.4 위치추정성능 정량평가
V. 결 론
I. 서 론
위치 추정 기법에는 도달시간차(Time Difference of Arrival, TDOA) 기반, 도달시간(Time of Arrival, TOA) 기반, 수신 신호 강도(Received Signal Strength, RSS) 기반, 그리고 도래각(Direction of Arrival, DOA) 기반 기법이 있다.[1,2] 이 중 TDOA와 TOA 기반 기법은 센서 간 정밀한 시간 동기화가 필수적이며, RSS 기반 기법은 거리별 신호 감쇠 모델이 필요하다.[1] 그러나 수중 환경과 같이 주변소음, 다중경로 전파 및 수온·염분·압력 변화에 따른 음속 변동으로 인하여 시간 동기화 와 신호 감쇠 특성 모델링이 어려워, 해당 기법들의 활용에 제한이 존재한다.[2]
반면, DOA 기반 기법은 시간 동기화나 감쇠 모델이 필요 없이 다수의 센서에서 산출한 DOA 정보를 결합하여 이들 간의 교차점을 찾음으로써 위치추정을 수행할 수 있다.[1,2] 하지만, 해당 기법 또한 수중 환경의 주변 소음, 다중경로 등으로 인하여 DOA 추정치에 오차를 발생하게 되고 이는 교차점이 다수 형성되어 표적 위치가 불확실해지는 문제가 발생한다.[2]
이러한 문제를 해결하기 위해 지금까지 다양한 시도가 있었다. Kaplan et al.[3]은 최소 자승법(Least Square, LS)을 이용하여 비선형 비용함수를 만들고 이를 최소화하는 좌표를 찾음으로써 표적 위치를 추정했다. 해당 기법은 비선형적 특성으로 인해 수치적 탐색이 필요하고 초기값이 부적절할 경우 해를 찾기 어렵다. 그래서 Stansfield[4]는 거리 정보가 주어지고 DOA 오차가 작은 경우를 가정하여 가중 선형 최소자승 추정기(Weighted Linear Least Square, WLS)를 제안하였다. 하지만 WLS 기법은 측정값의 잡음만 고려하고 센서 기하 및 DOA 추정값으로 구성된 시스템 벡터의 오차는 고려하지 않아 이것으로 인한 편향이 존재하며 이것은 측정값이 많더라도 완전히 제거되지 않는다.[5,6]
이러한 WLS 기법의 편향 문제를 완화하기 위해 몇가지 시도가 있었다. Chan et al.[7] 등은 오차와 상관되지 않은 도구 변수(Instrumental Variable, IV)를 활용하여 편향을 줄이고자 하는 접근을 시도하였으며, Doğançay[8]는 측정 벡터 오차와 시스템 벡터 오차를 함께 고려하는 전체 최소자승법(Total Least Square, TLS)을 적용하였다.
한편, Luo et al.[9]은 각 센서의 측정값 중 이상치가 존재할 경우, 기존 IV 및 TLS 기반 방법의 성능이 저하됨을 지적하고, L1-norm을 사용하는 최소절대잔차(Least Absolute Residual, LAR)와 전체 최소절대잔차(Total Least Absolute Residual, TLAR)를 위치추정에 적용하여 해당 조건에서도 강건한 위치추정이 가능함을 보였다.
이러한 최소자승 혹은 최소절대잔차를 기반한 방법 외에도 표적 위치 근처에 교차점들이 위치하는 현상을 이용하여 밀도추정 알고리즘을 사용하는 방법이 있다.[10,11,12] 이를 통해 표적위치 추정값과 불확실성을 함께 얻을 수 있었다.
한편, 교차점 기반 접근법 외에도 맵 기반 접근법이 존재한다. Tiete et al.[13]는 도시음향에서 노드별 빔형성 결과를 X–Y 평면으로 사상한 뒤 주변환경을 고려한 가우시안 가중치로 거리 감쇠를 반영하여 융합하였고, Kühne et al.[14]은 다중상태 소나를 이용해 능동표적의 사운드스케이프(Soundscape)를 도시하였다.
본 논문은 수동 Directional Frequency Analysis and Recording(DIFAR) 소노부이를 이용한 수동 표적 위치추정에 맵 기반 융합 방법을 적용하고 이를 ‘모호성 지도’로 정의하였다. 모호성 지도를 통한 표적위치추정의 성능 도출과 정규화 여부가 미치는 영향을 분석하기 위해 실제와 유사한 모의 수중환경에서 표적 위치추정 성능을 비교·평가하였다.
본 논문의 다음과 같이 진행된다. II 장에서 DIFAR 소노부이의 채널 구조와 각 채널의 신호 표현에 대해 설명하고 III 장에서는 모호성 지도의 구현 방법을 다룬다. IV 장에서는 모의된 수중환경에서 모호성 지도의 성능을 평가하고 V 장에서 결론 및 향후 연구를 제시한다.
II. DIFAR 소노부이 채널 구조와 신호 표현
DIFAR 소노부이는 하나의 전방향성 채널과 서로 직교하는 두 개의 지향성 채널을 통해 DOA를 추정한다. 이때, 두 지향성 채널은 신호의 X축 속도성분을 추정하는 사인(Sine) 채널과 Y축 속도성분을 추정하는 코사인(Cosine) 채널이 있다.[15,16] 각 채널의 구조는 Fig. 1에서 확인할 수 있다.
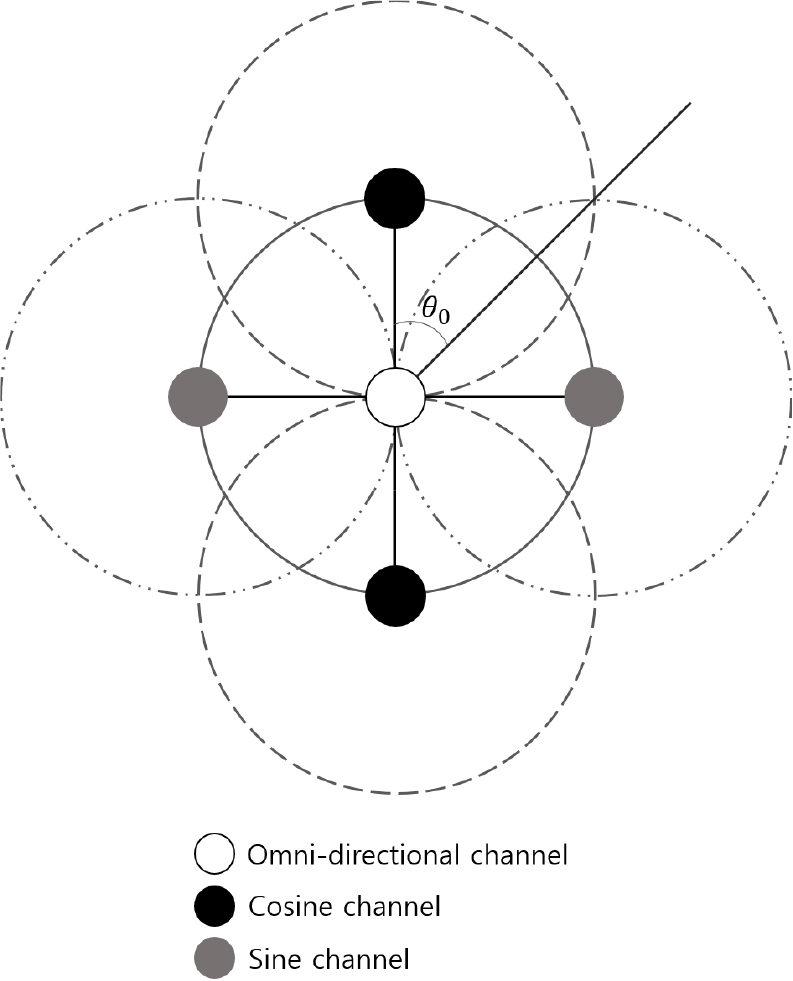
각 채널의 신호표현을 원통형 좌표계에서 다음과 같이 나타낼 수 있다.
여기서 은 표적과 수신기의 수평거리, 는 수신기심도, 는 표적 심도를 의미하며, 와 는 각각 위치에서 압력과 수평속도 성분을 나타내고, 는 자북 기준 신호 도래각을 의미한다. , , 는 각각 전방향성 채널, 사인 채널, 코사인 채널로 수신되는 잡음을 의미한다. 이때, 수중환경을 2 차원으로 모의한다면 지향성 채널의 잡음 이득은 1/2이 되고 3차원으로 모의한다면 잡음 이득은 1/3이 된다.[17]
한편, 표적을 중심으로 설정된 축대칭 거리독립 해양환경을 가정하고 정상모드법을 사용하여 과 를 모의하면 다음과 같이 나타낼 수 있다.[18]
여기서 𝜌, 𝜔는 각각 밀도, 각주파수를 의미하고 와 은 각각 m번째 모드의 고유함수와 고유값을 의미한다.
Eq. (4)는 DIFAR 소노부이의 신호벡터이다. 와 에는 밀도(𝜌)와 음속()이 곱해진 것은 각 요소 간의 차원을 통일시키 위함이다.
III. 제안 기법
3.1 모호성 지도를 이용한 표적위치추정
모호성 지도는 다수의 소노부이의 빔형성 결과의 비상관적 합산에 기반하며, 각 위치의 누적된 빔 파워 값을 나태내는 2차원 분포이다. 빔형성으로 DOA 추정 시, 최고의 빔파워 응답을 보이는 방향을 DOA로 추정하므로 지도에서 큰 값을 가진다는 것은 여러 소노부이의 방위 지향선이 서로 근접해 교차하는 영역임을 의미한다. 따라서 표적 위치는 다음과 같이 지도에서 최대값을 갖는 좌표를 찾음으로써 추정된다.
여기서 는 모호성 지도를, 는 지도 내의 모든 좌표 집합을 의미한다.
3.2 모호성 지도 구현
모호성 지도 구현은 DIFAR 소노부이의 빔형성을 X-Y 평면에 사상하는 것으로 시작된다. 이때 다양한 빔형성이 사용될 수 있겠으나, 본 연구에서는 전통적 빔형성 기법(Conventional Beamforming, CBF) 또는 최소분산(Minimum variance distortionless response, MVDR)를 사용하였다. 이들의 출력은 아래와 같다.
여기서 는 각 채널의 상관관계를 나타내는 공분산 행렬이며, 는 조향각 𝜃에 대한 조향벡터이다. 은 개의 스냅샷에 대한 표본평균으로 Eq. (8)과 같이 추정하며 는 DIFAR 소노부이 채널 구조를 고려하여 Eq. (9)과 같이 나타낸다.
이때, 조향벡터를 임의의 좌표에 대한 식을 변환하면 좌표에 따른 빔파워를 얻을 수 있다. 이를 위해 임의의 좌표 와 소노부이의 좌표 간의 방위각을 계산한다.
이것을 기존의 조향벡터에 대입하여 를 구성함으로써 기존의 빔형성 표현을 𝜃이 아닌, 에 대한 좌표로 나타낼 수 있다. 이러한 과정을 모든 소노부이에 대해 반복하여 아래와 같이 모두 합산하면 모호성 지도를 생성할 수 있다.
여기서 은 배치된 소노부이 수를 는 X-Y평면 상으로 사상된 빔형성을 의미한다.
이때, 각 소노부이의 빔형성 결과의 정규화 여부는 모호성 지도에 중요한 영향을 미친다. 비정규화의 경우, 각 소노부이에서 산출된 빔 파워가 그대로 사용되므로, 상대적으로 신호대잡음비(Signal to Noise Ratio, SNR)이 높아 빔 파워가 크게 나타나는 소노부이가 모호성 지도에 더 큰 영향을 미치게 된다.[14] 반면, 정규화를 적용할 경우 모든 소노부이의 빔형성 결과가 동일한 범위로 조정되어, 모든 소노부이가 동등하게 기여하게 된다.
본 연구에서는 각 부이의 빔형성을 다음과 같이 [0, 1]사이의 값으로 정규화하였다.
본 연구에서는 정규화한 경우와 하지 않은 경우의 모호성 지도를 모두 구현하여 비교함으로써, 서로 다른 융합 방식이 위치추정 결과에 미치는 영향을 분석하였다.
IV. 실험 결과
4.1 실험 설정
모호성 지도의 표적 위치추정 성능을 평가하기 위해 Fig. 2에서와 같이 동해 천해 환경과 동해 심해 환경의 음속 프로파일과 음장을 모의하였다.
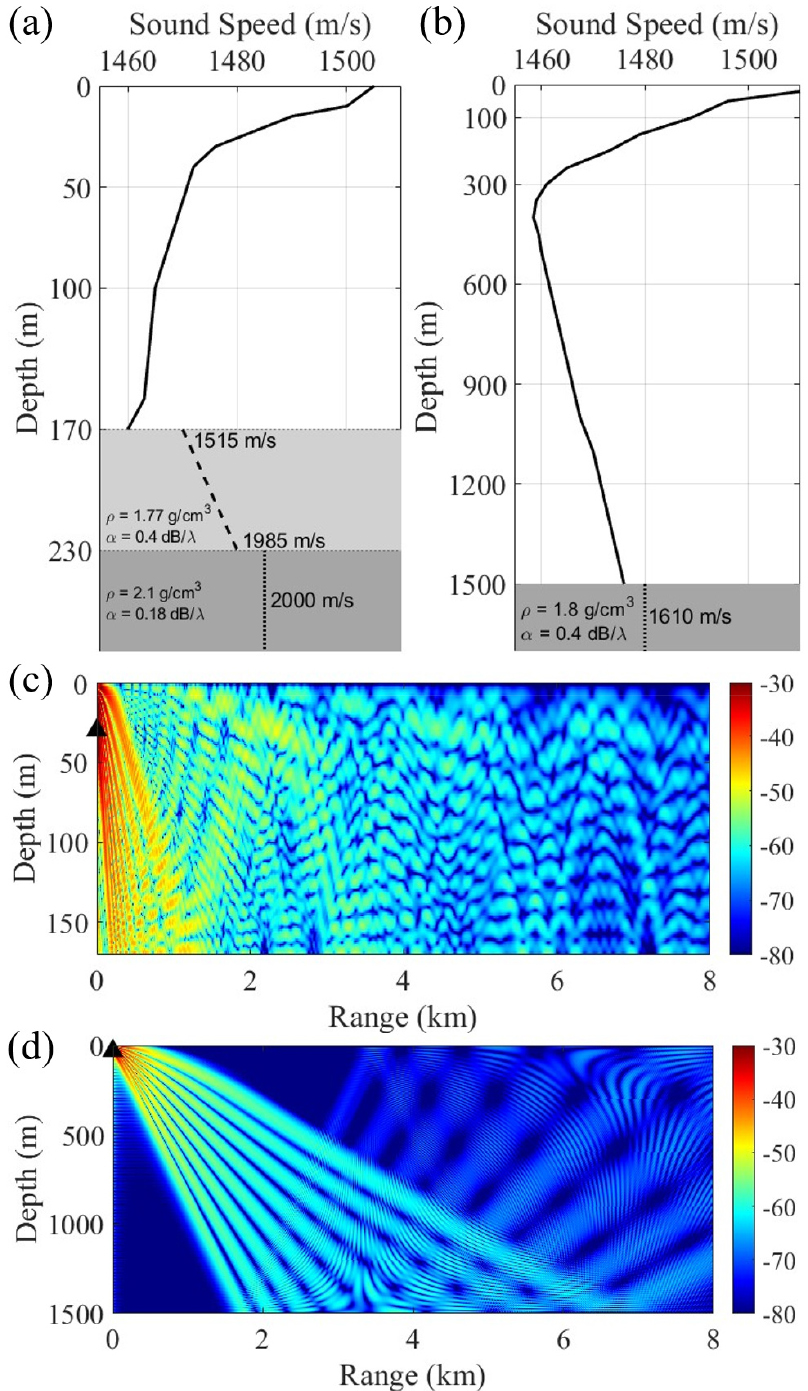
소노부이 배치패턴은 십자형 배열을 적용하였고,[19] 소노부이 간 간격은 2.7 km로, 각 소노부이의 하이드로폰 배치 심도는 90 m으로 설정했다. 또한 표적은 배치 패턴 내부에 위치하며, 심도는 수온약층에 해당하는 30 m로 설정하였다. 이때 표적의 방사 주파수는 300 Hz이다. 또한, 다양한 주변소음 조건에서 모호성 지도의 성능을 평가하기 위하여 전체 배치패턴의 신호대잡음비(Total Signal to Noise Ratio, TSNR)을 아래와 같이 정의하였다.
여기서 는 번째 소노부이의 신호 전력을, 는 잡음 전력을 의미한다. 각 소노부이의 SNR 또한 사용하였으며 다음과 같이 정의하였다.
여기서 는 소노부이의 신호전력을 의미한다.
4.2 주변소음의 영향
Figs. 3과 4는 각각 동해 천해 환경에서 TSNR이 5 dB와 –5 dB인 경우에 대해, 정규화 여부에 따른 CBF 기반 및 MVDR 기반 모호성 지도의 표적 위치추정 결과를 나타낸 것이다. (a)와 (b)는 정규화된 빔형성을 이용한 모호성 지도이고, (c)와 (d)는 비정규화된 결과이며, (a)와 (c)는 TSNR 5 dB일 때, (b)와 (d)는 –5 dB일 때의 결과를 나타낸다.
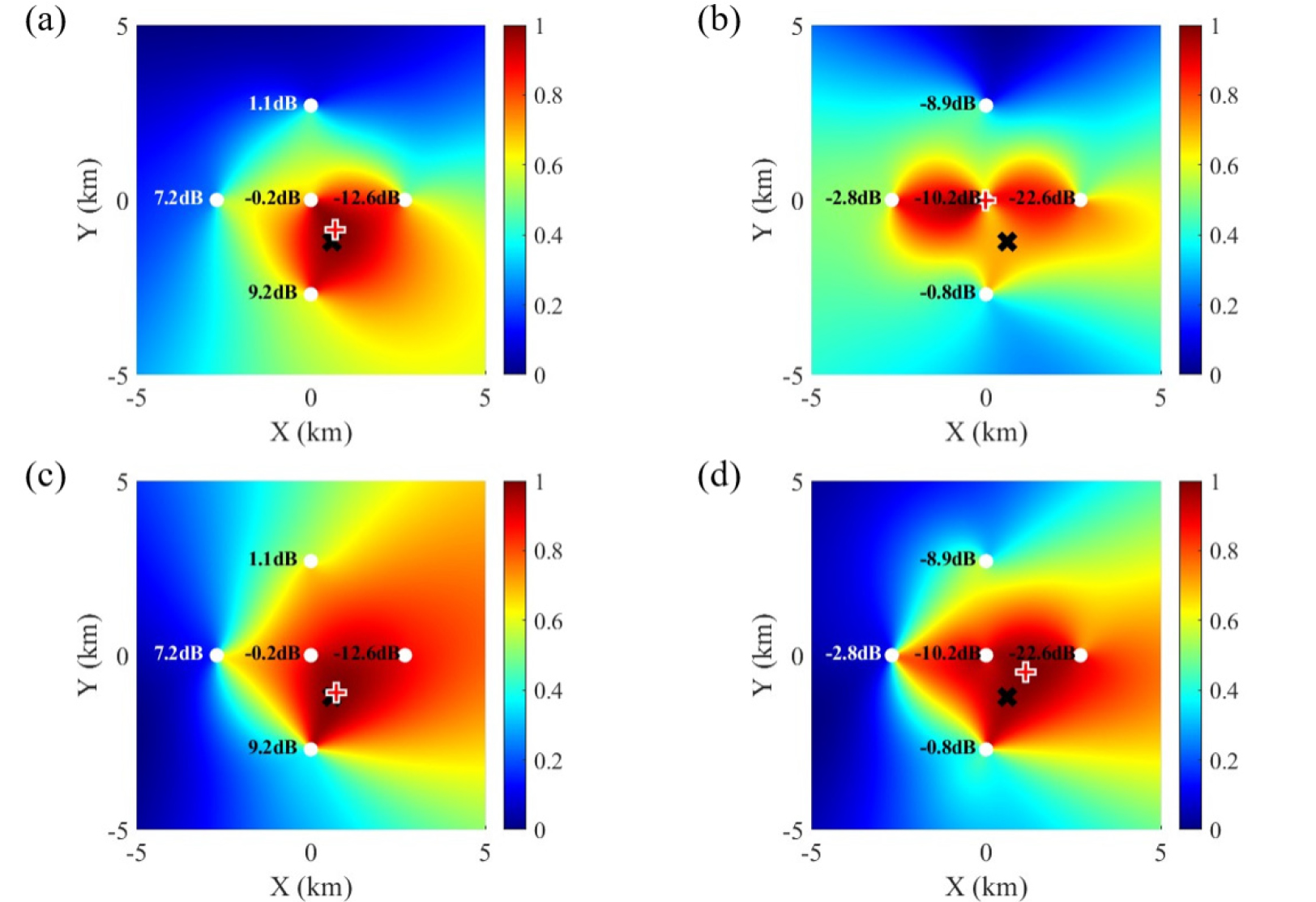
Fig. 3.
(Color available online) Ambiguity map using CBF in the shallow water environment of the East Sea under different TSNR and normlization conditions: (a) Normalized, TSNR = 5 dB, (b) normalized, TSNR = -5 dB, (c) unnormalized, TSNR = 5 dB, (d) unnormalized, TSNR = -5 dB. White circles, black cross, and red cross indicate sonobuoys, target location, and estimated locations, respectively.
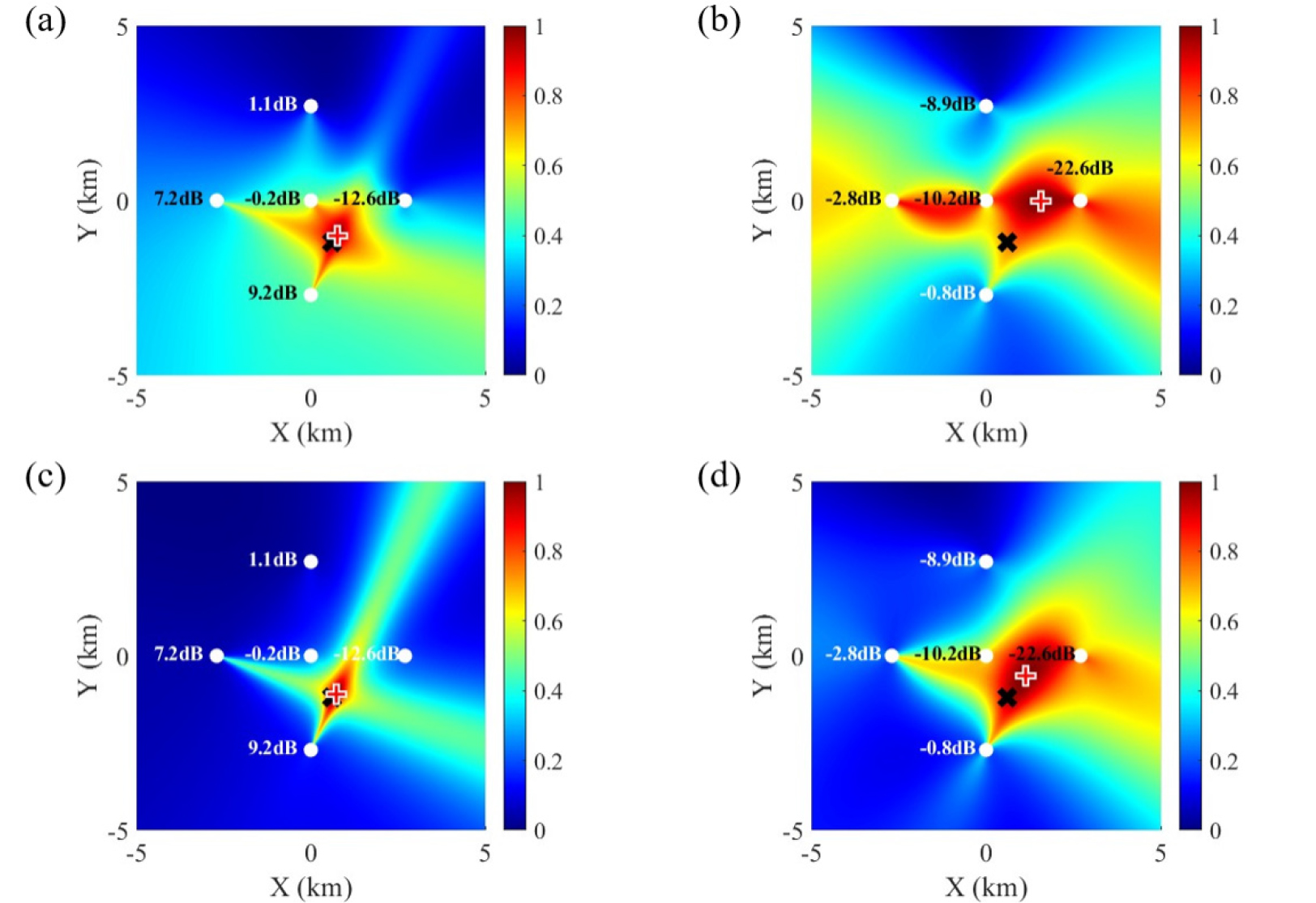
Fig. 4.
(Color available online) Ambiguity map using MVDR in the shallow water environment of the East Sea under different TSNR and normlization conditions: (a) Normalized, TSNR = 5 dB, (b) normalized, TSNR = -5 dB, (c) unnormalized, TSNR = 5 dB, (d) unnormalized, TSNR = -5 dB. White circles, black cross, and red cross indicate sonobuoys, target location, and estimated locations, respectively.
실험 결과, TSNR이 낮아질수록 위치추정 오차가 증가하는 것을 관찰할 수 있었다. 이는 TSNR이 낮을수록 각 소노부이의 빔형성이 잡음 영향을 크게 받아 왜곡되며,[20] 이로 인해 모호성 지도에서 최대값을 갖는 좌표가 실제 표적 위치로부터 더 크게 벗어났기 때문이다.
또한 정규화된 모호성 지도는 비정규화된 경우보다 상대적으로 높은 위치추정 오차를 보였다. 이는 SNR이 낮은 소노부이의 왜곡된 빔형성 결과가 정규화 과정에서 동일한 비중으로 합산되기 때문이며, 반대로 비정규화 방식은 SNR이 높은 소노부이의 정보에 더 큰 가중이 주어진 것과 같으며 이로 인해 SNR이 낮은 소노부이의 영향을 약화시키기 때문이다.
4.3 전파경로의 영향
Fig. 3(b)은 표적이 (0.6 km, –1.2 km)에 위치한 상황이다. 그러나 (–2.7 km, 0 km)에 위치한 소노부이가 (2.7 km, 0 km)에 위치한 소노부이보다 표적으로부터 더 멀리 있음에도 불구하고 SNR이 더 높게 나타나는 것을 확인할 수 있다. 이는 Fig. 2(c) 에서 확인할 수 있듯이, 천해에서는 음속 구조로 인한 하향 굴절과 해저면, 해수면 복반사로 인해 음장의 간섭이 심하게 발생하기 때문이다.
한편, Figs. 5와 6은 각각 동해 천해 환경에서 TSNR이 5 dB와 –5 dB인 경우에 대해, 정규화 여부에 따른 CBF 기반 및 MVDR 기반 모호성 지도의 표적 위치추정 결과를 나타낸 것이다. (a)와 (b)는 정규화된 빔형성을 이용한 모호성 지도이고, (c)와 (d)는 비정규화된 결과이며, (a)와 (c)는 TSNR 5 dB일 때, (b)와 (d)는 –5 dB일 때의 결과를 나타낸다.
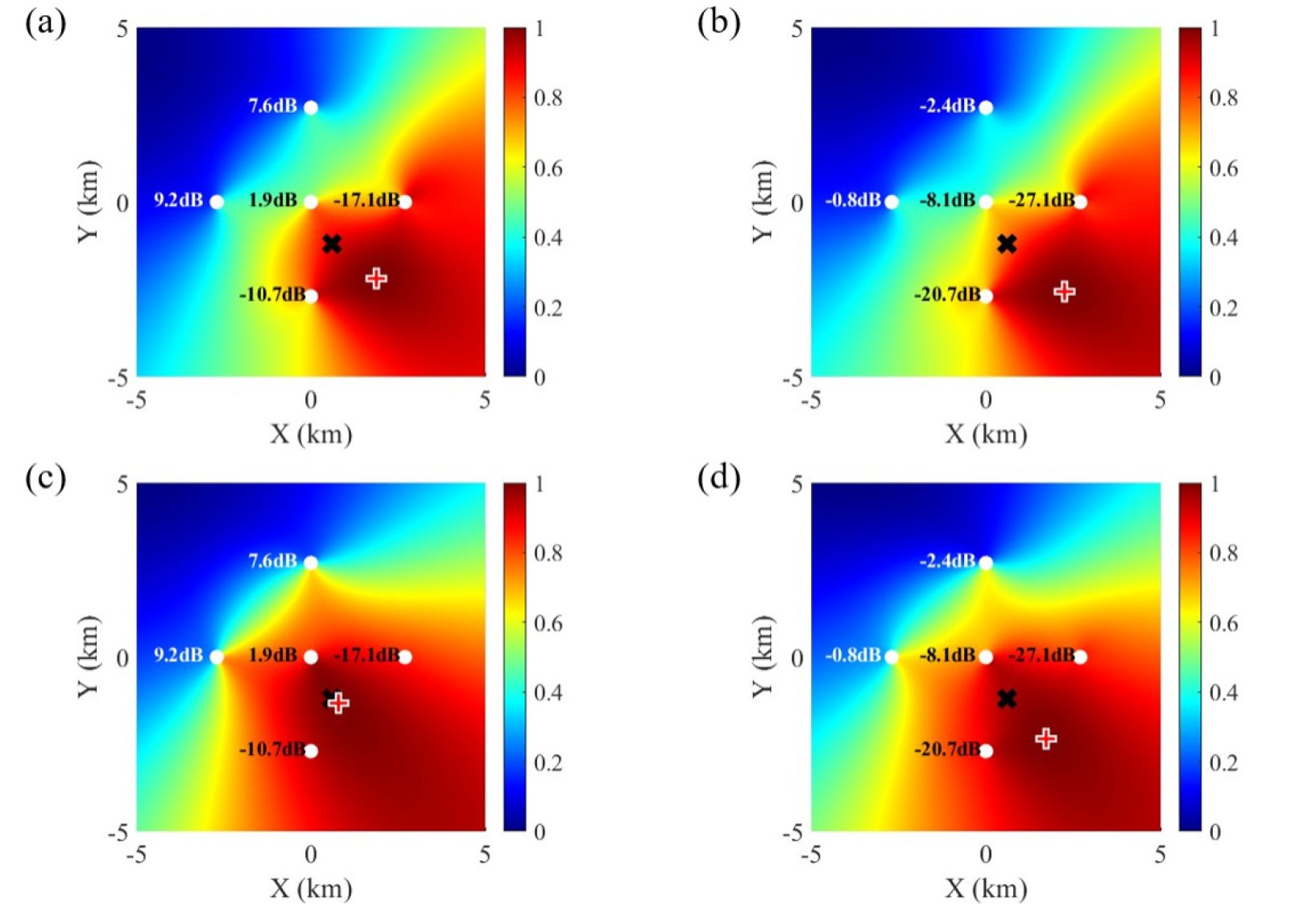
Fig. 5.
(Color available online) Ambiguity map using CBF in the deep water environment of the East Sea under different TSNR and normlization conditions: (a) Normalized, TSNR = 5 dB, (b) normalized, TSNR = -5 dB, (c) unnormalized, TSNR = 5 dB, (d) unnormalized, TSNR = -5 dB. White circles, black cross, and red cross indicate sonobuoys, target location, and estimated locations, respectively.
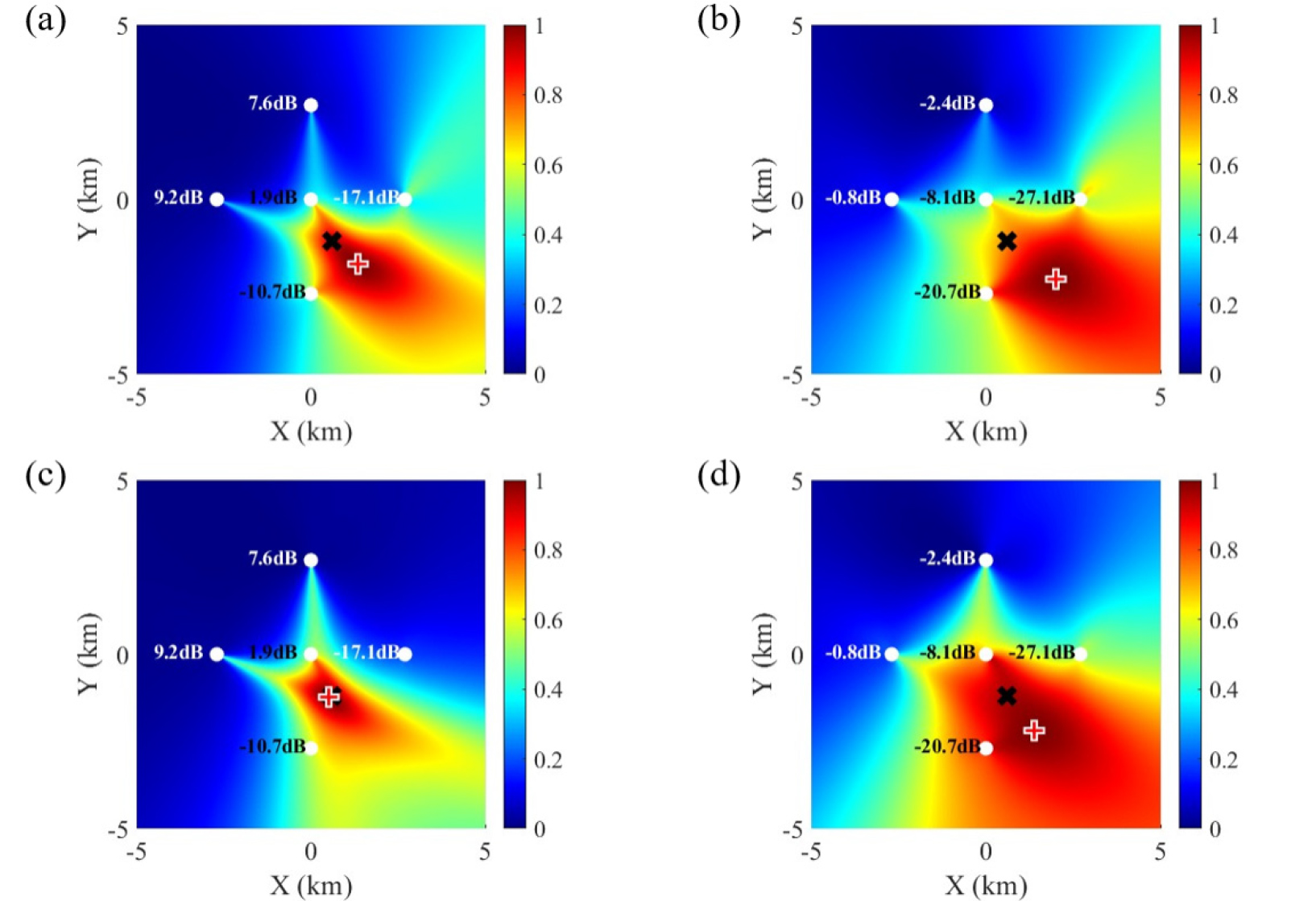
Fig. 6.
(Color available online) Ambiguity map using MVDR in the deep water environment of the East Sea under different TSNR and normlization conditions: (a) Normalized, TSNR = 5 dB, (b) normalized, TSNR = -5 dB, (c) unnormalized, TSNR = 5 dB, (d) unnormalized, TSNR = -5 dB. White circles, black cross, and red cross indicate sonobuoys, target location, and estimated locations, respectively.
이들과 동해 천해 환경에서의 결과인 Figs. 3과 4와 비교하면, TSNR이 동일함에도 불구하고 동해 심해 환경에서 더 큰 위치추정 오차가 발생하는 것을 확인할 수 있다. 이는 동해 천해와 심해의 신호 전파경로의 특성 차이에 기인한다. Fig. 2(c)와 (d)에서 확인할 수 있듯, 심해에서는 해저면 및 해수면 반사 기여가 천해보다 제한되고 음속 구배로 인한 굴절로 인해 음향 에너지가 공간적으로 고르게 전파되지 못한다.[21] 그 결과 음영구역이 넓게 형성되며 이로 인해 일부 소노부이는 천해보다 낮은 SNR 조건에 놓이게 되어 표적위치추정 성능을 저하시키는 요인이 된다.
4.4 위치추정성능 정량평가
모호성 지도 기반 위치추정 기법의 성능을 정량적으로 비교·검증하기 위해 몬테카를로 시뮬레이션으로 TSNR에 따른 위치추정 성능의 정량평가를 수행하였다. 각 시행에서 표적의 위치는 소노부이 배치패턴 내부에서 무작위로 위치하도록 하였다. 또한, CBF와 MVDR 빔형성 기법을 적용한 모호성 지도에 대하여 각각 평가를 진행하였으며, 성능 지표로서 오차의 평균(Mean Absolute Error, MAE)과 오차의 표준편차(Standard deviation of Absolute Error, STD)를 사용하였다. 각각의 정의는 아래와 같다.
여기서 는 표적위치추정의 절대오차이고 은 시행 횟수이다(=150).
Figs. 7와 8에서 확인할 수 있듯, TSNR이 동일한 조건에서도 동해 천해 환경은 심해 환경에 비해 MAE와 STD가 감소하는 결과를 보였다. 전체 TSNR –10 dB부터 10 dB까지 구간의 평균값 기준으로 CBF의 경우 천해 환경은 심해 환경 대비 MAE가 약 61.02 %, STD가 약 47.13 % 감소하는 결과를 보였고, MVDR의 경우에도 MAE가 약 59.59 %, STD가 약 46.09 % 감소하여 동일한 경향을 나타내었다. 이는 앞선 정성적 분석(4.2, 4.3절)에서 제시된 바와 같이, 천해 환경의 상대적으로 안정된 음장 구조와 제한된 음영구역 형성으로 인해 소노부이 간 SNR 불균형이 감소하고, 이러한 환경적 요인이 위치추정의 안정성과 정확도 향상에 기여한 결과로 해석된다.
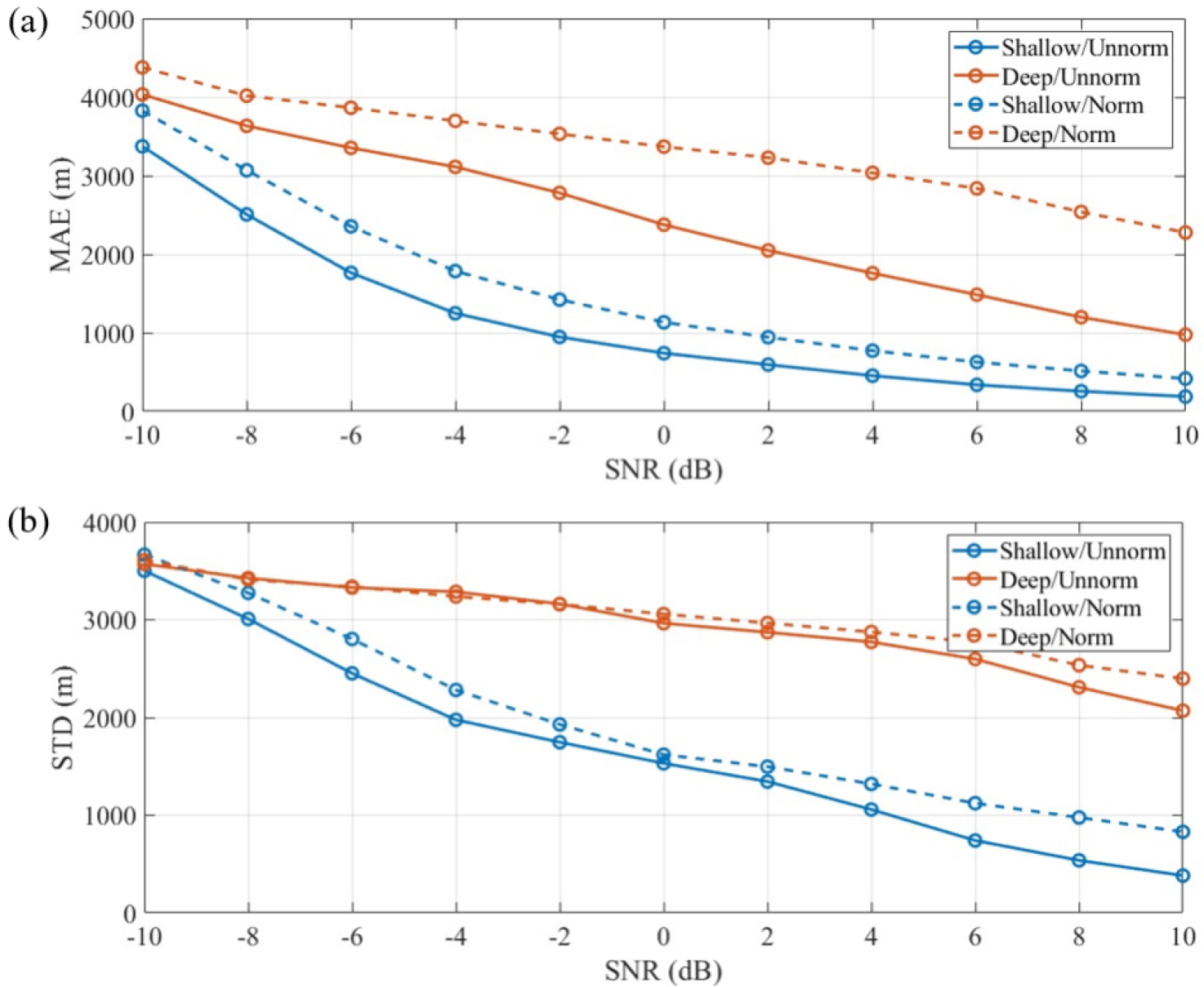
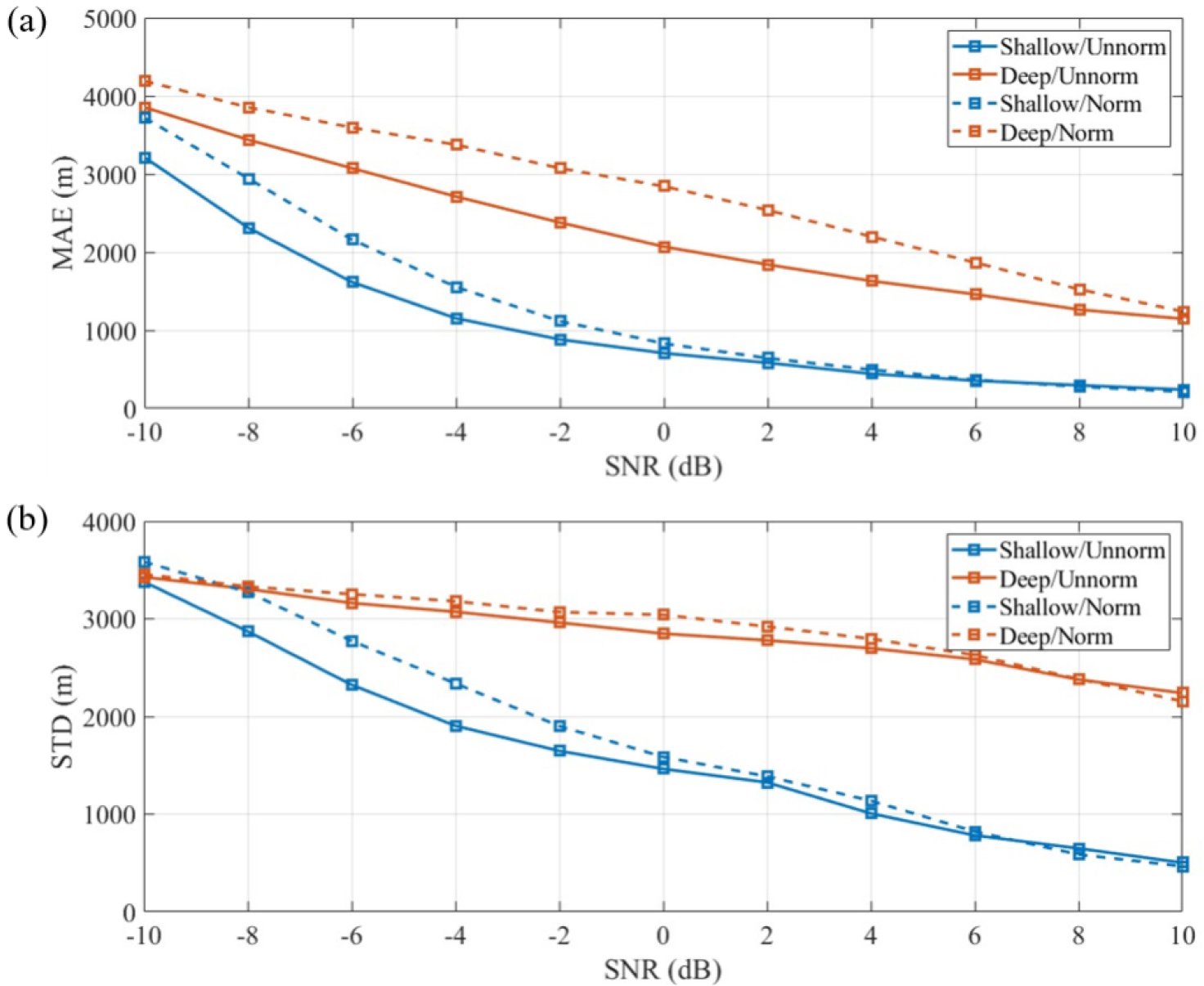
또한 비정규화 방식의 모호성 지도는 정규화 방식 대비 일관적으로 더 낮은 MAE와 STD를 보였다. 전체 TSNR 구간 평균 기준으로 CBF는 정규화 대비 비정규화 시 MAE가 약 34.80 %, STD가 약 19.68 % 감소하였으며, MVDR의 경우 MAE가 약 11.40 %, STD가 약 6.93 % 감소하였다. 이는 분산된 소노부이 네트워크에서 SNR이 높은 소노부이의 정보를 상대적으로 더 높은 비중으로 활용하는 것이 효과적임을 정량적으로 입증한다.
V. 결 론
본 논문에서는 다중 수동 소노부이 환경에서 DOA 기반 위치추정에 발생하는 단일 교차점 비수렴 문제를 해결하기 위해, 각 소노부이의 빔평면 매핑을 이용한 표적 위치추정 방법을 제시하였다. 제안된 방법은 빔파워 분포를 공간적으로 합산함으로써 표적 존재 가능성을 정량적으로 표현한다. 주변소음 및 다중경로를 고려한 동해 천해 및 심해 환경에서 모호성 지도 기반 위치추정 성능을 도출하였으며, 빔형성 정규화 여부에 따른 신호 융합 특성을 비교 분석하였다.
그 결과, 빔형성 비정규화가 정규화 대비 더 높은 위치추정 성능을 나타냈으며, 특히 심해 환경과 같이 음영구역으로 인해 각 센서 간 SNR 불균형이 심화되는 조건에서도, 비정규화 기법은 상대적으로 견고한 성능을 유지하였다. 이는 각 소노부이의 SNR에 따른 가중 데이터 융합이 위치추정에 효과적임을 입증한다. 추후 연구에서는 제안 기법을 LS, WLS, TLS등 DOA 기반 위치추정기법과 성능 비교 평가할 것이다. 또한, 다중상태 시나리오로 확장하고, 모호성 지도를 활용한 이미지 기반 표적 추적 연구를 수행할 예정이다.
