

I. 서 론
해양배경소음은 난류에 의한 변동, 선박 항행, 해양 생물 등의 다양한 원인에 의해 발생한다.[1] 중고주파수 소나에서 관심 있는 대역인 1 kHz 이상의 영역에서는 해양파에 의한 해수면 소음이 지배적인 것으로 알려져 있다.[2] 해양파에 의한 해양배경소음의 에너지는 대부분 해수면 근처의 넓은 영역에서 해양파에 의한 기포의 생성과 소멸에 의해 생성된다. 그렇기 때문에 물리적으로 해양 생성 배경소음원은 해수면 근처에서 수평 방향으로 넓게 분포해 있다고 생각할 수 있을 것이다. 이처럼 중고주파의 해양배경소음원은 전체 해양 영역에서 상부에만 분포해 있기 때문에, 그로 인해 수중에 발생하는 해양배경소음은 자연스럽게 비등방성을 띠게 된다.[3]
물리적으로 해양 소음의 영향은 소음 코히런스함수를 이용하여 표현한다. 소음 코히런스함수는 소나배열의 배열이득에서 나타나는 물리량으로 두 개의 청음기에 각각 수신되는 소음 신호의 상관성을 보여주는 양이다.[4]
Cron과 Sherman[5]이 반무한영역의 해양환경에서 소음코히런스함수를 유도하고 해석적인 식을 얻어낸 이래로, 국외의 많은 연구자들이 준해석법, 정상모드법, 파수적분법, 포물선방정식법을 이용하여 일반적인 해양환경에서 소음코히런스함수 모델을 연구했다.[2] 그중에 본 연구의 주제와 가장 가까운 중고주파 모델은 Harrison의 준해석법 모델[6]이다. Harrison의 모델은 기본적으로 음선법에 기반을 두고 유도된 모델이다. 하지만 Harrison은 수치적으로 소음코히런스함수를 구하기보다는 해석적으로 접근하여 최종적으로는 준해석적인 소음코히런스함수를 유도했다.
최근에는 Lee와 Seong[7]이 Kuperman과 Ingenito의 공식[4]으로부터 1 kHz에서 20 kHz의 중고주파 소나에서 사용가능한 중고주파 음선기반모델을 유도하고 근사해석을 수행했다. 본 연구에서는 Lee와 Seong의 소음코히런스함수에 대한 일반적인 공식을 이용하여 다양한 해양환경에 대해 수치해석을 수행했다.
Lee와 Seong의 음선기반모델은 Harrison의 준해석식보다는 범용적인 모델이기는 하나, 해석결과가 청음기 쌍의 간격 또는 주파수에 따른 함수로만 표현이 되는 한계가 있었다. 그래서 소나배열 연구자들에게 유용한 해양소음의 방향성을 보여주지 못했다. 본 연구에서는 음선기반모델의 산출결과에 대한 후처리를 통해 해양소음의 방향성을 도시하는 기법을 제안한다.
II장의 서두에는 음선기반 해수면 배경소음 코히런스함수를 리뷰 한다. 이어서 수치해석적인 고려사항 및 해석결과의 후처리 기법을 서술한다. III장에서는 청음기 쌍의 기하학적 상태에 따른 수치해석결과를 제시했으며, IV장에서는 천해 및 심해에서의 해양환경에 따른 수치해석 결과를 제시했다. V장은 결론이다.
II. 해수면 배경소음 코히런스함수
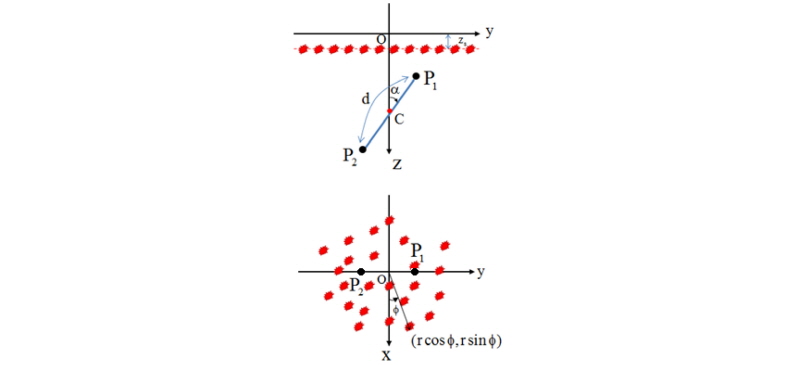
Fig. 1과 같은 좌표계를 가정한다. 해수면 소음원은  의 깊이에
의 깊이에  평면과 평행하게 면으로 분포해 있으며, 청음기 쌍은 각각
평면과 평행하게 면으로 분포해 있으며, 청음기 쌍은 각각  과
과  에 위치해 있고, 청음기 쌍은 중심이
에 위치해 있고, 청음기 쌍은 중심이  이다. 청음기 쌍의 길이는
이다. 청음기 쌍의 길이는  이고,
이고,  의 고각으로 회전되어 있는 상태이다. 이때 각각의 청음기 위치에서 상대좌표는
의 고각으로 회전되어 있는 상태이다. 이때 각각의 청음기 위치에서 상대좌표는 이고,
이고, 
 가 된다. Fig. 1의 좌표계는 두 개의 청음기가 위치한 수직면을 yz평면으로 설정한 상대 좌표계이므로 청음기의 3차원 공간배치에 따라 좌표계의 위치는 상대적으로 달라진다. 어떤 절대적인 고정좌표계에 대한 청음기 쌍의 수평각의 차이는 상대좌표계에 반영이 되어 있으므로, 상대좌표계가 설정이 되면 수평각에 대한 정보는 필요가 없다. 만약 해양환경이 청음기 쌍의 중심에 대해 축대칭이라면 절대적인 고정좌표계에 대해 청음기 쌍의 수평각이 변하더라도 해양소음 코히런스는 변하지 않는다. 하지만, 해양환경이 축대칭이 아니라면 절대적인 고정좌표계에 대해 청음기 쌍의 수평각이 변한다면, 상대좌표계를 해당 방향에 대해 다시 설정을 해주어야 하며 해양소음 코히런스도 달라질 것이다.
가 된다. Fig. 1의 좌표계는 두 개의 청음기가 위치한 수직면을 yz평면으로 설정한 상대 좌표계이므로 청음기의 3차원 공간배치에 따라 좌표계의 위치는 상대적으로 달라진다. 어떤 절대적인 고정좌표계에 대한 청음기 쌍의 수평각의 차이는 상대좌표계에 반영이 되어 있으므로, 상대좌표계가 설정이 되면 수평각에 대한 정보는 필요가 없다. 만약 해양환경이 청음기 쌍의 중심에 대해 축대칭이라면 절대적인 고정좌표계에 대해 청음기 쌍의 수평각이 변하더라도 해양소음 코히런스는 변하지 않는다. 하지만, 해양환경이 축대칭이 아니라면 절대적인 고정좌표계에 대해 청음기 쌍의 수평각이 변한다면, 상대좌표계를 해당 방향에 대해 다시 설정을 해주어야 하며 해양소음 코히런스도 달라질 것이다.
 coordinate can be transformed into the
coordinate can be transformed into the  coordinate.
coordinate.한편, 해수면 아래에 분포된 하나의 소음원으로부터 하나의 청음기에 수신되는 음파는 음선법에 의해 다음과 같이 표현된다.
 , (1)
, (1)
여기서 아래첨자  는 청음기의 위치를 나타내는 숫자로 1과 2이며, s는 소음원을 의미한다.
는 청음기의 위치를 나타내는 숫자로 1과 2이며, s는 소음원을 의미한다.  은
은  번째 음선의 크기,
번째 음선의 크기,  은
은  번째 음선의 도달시간,
번째 음선의 도달시간,  은
은  번째 음선의 위상을 나타낸다. 해수면에 분포된 전체 소음원으로부터 하나의 청음기에 들어오는 음장은 Eq.(1)을
번째 음선의 위상을 나타낸다. 해수면에 분포된 전체 소음원으로부터 하나의 청음기에 들어오는 음장은 Eq.(1)을  평면과 평행한 무한영역에 대해 넓이적분(또는 이중적분)을 하는 형태로 주어진다.
평면과 평행한 무한영역에 대해 넓이적분(또는 이중적분)을 하는 형태로 주어진다.
소음 코히런스함수는 정의에 의해 청음기 P1과 P2에 수신되는 음장의 정규화된 교차스펙트럴밀도로 정의된다. 각각의 소음원이 서로 비상관되어 있다고 가정하면, 소음원 간의 상관함수는 델타함수의 형태가 된다. 그렇다면 소음 코히런스함수의 사중적분은 이중적분 형태로 축소될 수 있을 것이다. 만약에 두 개의 청음기 사이의 거리가 매우 근접하다는 가정을 추가하면, 두 개의 청음기에 수신되는 음선의 특성은 청음기 쌍의 중심에서의 음선 특성의 미소 변동량으로 근사할 수 있다. 이 성질을 이용하면 두 개의 청음기에 대해 각각 음선특성을 계산할 필요가 없어진다. 대신에 청음기 중심에 대한 음선특성을 음선모델을 이용해 한번만 계산하고, 두 개의 청음기 위치에서의 음선특성은 변동량으로 처리할 수 있다.
또한, 해수면 소음원은 해수면에 가까운 수심에 분포하고 있다고 생각했다. 그 결과로서 해수면 소음원에서 상향되는 음장과 하향되는 음장은 마치 하나의 dipole 음장처럼 거동한다고 가정했다. 물론 수식 상으로는 굳이 dipole 음원으로 취급하지 않고 monopole 음원으로 취급해도 아무런 문제가 없다. 하지만 수치적으로 음선을 추적할 때 소음원의 깊이가 해수면에 매우 가깝다면, ‘소음원에서 수신원에 직접 도달하는 음선’과 ‘소음원에서 해수면을 맞고 수신원에 도달하는 음선’간의 도달시간의 차이가 도달 시간의 수치 오차보다 더 작아지는 경우가 발생한다. 이러한 문제를 해결하기 위해 본 연구에서는 소음원을 dipole 음원으로 취급하였다. 그에 따라 음선추적에서 얻어지는 음선 중에 소음원으로부터 해저면으로의 하향 되는 음선만을 계산에 사용했다. 더 나아가, 음선간의 교차 곱에 해당하는 성분을 무시했다. 해당 성분은 중고주파 영역에서는 자기 곱에 비해 변동이 심하며 이중적분에 의해 빠르게 0으로 수렴된다.
위의 모든 가정을 적용하면, 해양파에 의한 소음 코히런스함수의 최종식은 아래와 같이 정리된다.[7]
 . (2)
. (2)
위의 식에서 음선 특성은  에 분포된 각각의 소음원의 위치와 청음기 쌍의 중심에 대해 정의된다는 것에 유의한다. 아래첨자 s는 소음원에 대한 물리량을 나타내며 아래첨자 r은 수신원에 대한 물리량이다.
에 분포된 각각의 소음원의 위치와 청음기 쌍의 중심에 대해 정의된다는 것에 유의한다. 아래첨자 s는 소음원에 대한 물리량을 나타내며 아래첨자 r은 수신원에 대한 물리량이다.  은 m번째 음선의 고각을 나타내며,
은 m번째 음선의 고각을 나타내며,  는 Fig. 1에서 정의한 방위각이다.
는 Fig. 1에서 정의한 방위각이다.  와
와  는 청음기 위치에서의 청음기 중심에 대한 y와 z의 상대좌표를 나타낸다.
는 청음기 위치에서의 청음기 중심에 대한 y와 z의 상대좌표를 나타낸다.  항은 dipole 소음원 가정으로부터 도출되는 양이다. Eq.(2)에서 단일 합연산자가 나타난 이유는 음선간의 교차 곱을 무시했기 때문이다. 위의 식에서 지수함수의 전체 위상은 청음기간의 물리적인 상대 거리 벡터와 입사하는 소음의 방향벡터간의 내적으로 볼 수 있다. 분모의 항은 코히런스 함수의 정의에 따라 정규화를 하기 위해 사용된 항이다.
항은 dipole 소음원 가정으로부터 도출되는 양이다. Eq.(2)에서 단일 합연산자가 나타난 이유는 음선간의 교차 곱을 무시했기 때문이다. 위의 식에서 지수함수의 전체 위상은 청음기간의 물리적인 상대 거리 벡터와 입사하는 소음의 방향벡터간의 내적으로 볼 수 있다. 분모의 항은 코히런스 함수의 정의에 따라 정규화를 하기 위해 사용된 항이다.
Eq.(2)를 수치적으로 풀기 위해서는 우선 이중 적분을 합 연산자로 이산화를 하고, 음선모델을 이용해 각각의 이산화 된 소음원 위치로부터 청음기 쌍의 중심까지 음선 특성을 각각 계산한다. 그리고 계산된 값을 이용하여 최종적으로 ‘이중적분과 음선 합’에 대한 삼중 합 연산을 수행하면 된다. 이러한 방식은 결국 ‘다중 소음원-단일 수신원’에 대한 음선탐색의 문제로 귀결되는데, 음선모델의 성격상 소음원마다 고유음선을 모두 찾아야하기 때문에 전산자원이 극심하게 소모된다. 이것을 해결하기 위한 한 가지 아이디어는 소음원-수신원 역전원리(source- receiver reciprocity principle)[4]를 이용하는 것이다. 소음원-수신원 역전원리는 음파의 선형성에 대한 가정으로부터 자연스럽게 도출되는 결과로 소음원과 수신원의 위치를 서로 바꿔도 동일한 결과를 얻는다는 것을 말한다. 해양 도파관에 대해서도 소음원-수신원 역전원리가 성립한다는 것이 증명이 되었으며, 본 연구에서 사용된 음선이론 또한 음선크기와 도달시간 등의 음선 물리량들이 모두 역전원리를 만족한다. 소음원-수신원 역전원리를 이용하면 ‘다중 소음원-단일 수신원’의 문제는 ‘단일 소음원-다중 수신원’의 문제로 치환할 수 있다. 마치 청음기 쌍의 중심에 하나의 소음원이 위치해 있고, 거리에 대해 음선 빔이 전파하면서  의 위치에서 수신하는 방식이다. 이와 같은 알고리즘을 선택하면 한 번의 음선 전달만으로 모든 음선정보를 얻을 수 있다.
의 위치에서 수신하는 방식이다. 이와 같은 알고리즘을 선택하면 한 번의 음선 전달만으로 모든 음선정보를 얻을 수 있다.
본 연구에서는 Eq.(2)를 지배식으로 삼아 수치해석을 수행했다. Eq.(2)에서 이중적분은 거리와 방위각을 균일격자로 나누어서 구분구적법을 이용하여 계산했다. 일반적인 해양환경에서는 거리와 방위각에 따라 Eq.(2)의 커널은 부드럽게 변하기 때문에 고차 수치적분법을 적용하는 것은 큰 의미가 없다.
특별히 주의해야 될 점은 Eq.(2)의 거리에 대한 적분은 상한한계가 무한대로 가는 이상적분이라는 점이다. 또한 Eq.(2)의 커널은 지수적으로 감소하지 않기 때문에 수치해석상 유한한 구간에 대해 적분을 수행하는 경우에는 aliasing이 필연적으로 나타난다. 이를 해결하는 유일한 방법은 거리에 대한 적분구간을 길게 해주는 것이다. 다행히 수중에서도 감쇠가 존재하기 때문에 이를 고려하면 수치 해는 보다 안정적으로 수렴하는 것을 확인할 수 있다. 본 연구에서는 수중감쇠계수를 고려하는 경우 약 100 km의 상한한계에서 Eq.(2)의 수치해가 안정적인 것을 확인했다. Eq.(2)는 청음기 쌍의 길이, 청음기 쌍의 자세각, 주파수, 해양 환경(음선 특성)에 따라 변한다. Eq.(2)의 해석결과는 당연히 위의 변수들에 대한 함수로 나타난다.
한편, Eq.(2)에서  에 대한 적분은 수신 각인
에 대한 적분은 수신 각인  에 대한 적분으로 치환 할 수 있을 것이다. Harrison은 위의 특성을 기반으로 하여, 여러 이상적인 해양 환경에서 Eq.(2)의 준해석식을 제시했다. Harrison의 준해석식은 Eq.(2)과 달리
에 대한 적분으로 치환 할 수 있을 것이다. Harrison은 위의 특성을 기반으로 하여, 여러 이상적인 해양 환경에서 Eq.(2)의 준해석식을 제시했다. Harrison의 준해석식은 Eq.(2)과 달리  은 형태로 되어 있다. 그렇기 때문에 Harrison 식의 커널은 자동으로 수신각과 방위각에 대한 함수로 표현되며, 각도에 따른 상대적인 소음준위의 변화를 나타낸다. 그러나 Eq.(2)의 음선기반모델의 커널로부터는 위와 같은 경향을 바로 얻어낼 수 없다.
은 형태로 되어 있다. 그렇기 때문에 Harrison 식의 커널은 자동으로 수신각과 방위각에 대한 함수로 표현되며, 각도에 따른 상대적인 소음준위의 변화를 나타낸다. 그러나 Eq.(2)의 음선기반모델의 커널로부터는 위와 같은 경향을 바로 얻어낼 수 없다.
본 연구에서는 후처리 과정을 통해 각도에 따른 상대적인 소음준위의 변화를 얻었다. 우선 Eq.(2)를 계산하는 과정 중에 각각의 거리와 방위각 격자에서 생성되는 음선정보와 이력을 모두 저장했다. 참고로 Eq.(2)에서 음선 번호를 뜻하는  을 음선의 이력으로 생각해도 무방하다.
을 음선의 이력으로 생각해도 무방하다.
Eq.(2)의 계산이 끝난 후에 전체 거리와 방위각 격자에 대해 저장된 파일을 읽어서 음선 이력별로 음선정보를 분류하고 그룹화했다. 예를 들어, 해수면을 1번 맞은 이력을 갖는 음선들끼리 같은 그룹으로 묶고, 해수면 1번 및 해저면 1번을 맞은 음선들끼리 같은 그룹으로 묶는 것을 뜻한다. 각 m번째 그룹의 음선에 대해 Eq.(2)의 m번째 커널을 계산하고, 계산 결과를 음선들의 수신 각에 대해 오름차순으로 정리를 했다. 이때 음선의 수신 각은 불균등하게 분포되어 있고, 수신 각의 상하한값도 음선그룹의 이력에 따라 달라진다. 그래서 보간법을 적용해서 불균등 수신각에 대한 결과를 균등 수신각에 대한 결과로 보간했다. 각각의 음선그룹에 대해 이와 같은 과정을 반복하면 결국 Eq.(2)의 전체 커널은 균등한 수신 각에 대한 함수로 주어진 각각의 m번째 커널의 합으로 계산할 수 있다. 다음 절부터는 수치해석을 통해 Eq.(2)의 특성을 살펴보겠다.
III. 청음기 쌍의 자세에 따른 변화
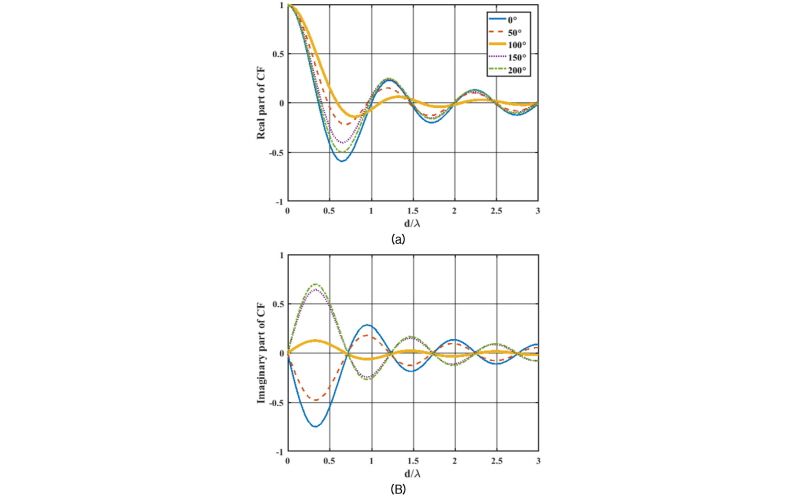
우선 청음기 쌍의 자세각의 변화에 따른 특성을 살펴본다. Fig. 2는 Pekeris 도파관의 환경에서 청음기 쌍의 자세각과  에 따른 코히런스함수의 변화를 그린 것이다. Pekeris 도파관은 수심 100 m의 진흙퇴적층으로 가정했고, 청음기 쌍은 수심 30 m에 놓여있다고 생각했다. Fig. 2(a)는 Eq.(2)의 cos 성분에 해당하는 실수성분을 나타내고 Fig. 2(b)는 sin 성분에 해당하는 허수성분이다.
에 따른 코히런스함수의 변화를 그린 것이다. Pekeris 도파관은 수심 100 m의 진흙퇴적층으로 가정했고, 청음기 쌍은 수심 30 m에 놓여있다고 생각했다. Fig. 2(a)는 Eq.(2)의 cos 성분에 해당하는 실수성분을 나타내고 Fig. 2(b)는 sin 성분에 해당하는 허수성분이다.
 and the orientation angle of
and the orientation angle of  , where
, where  is the acoustic wavelength in the center position of the hydrophone pair; (a) the real part and (b) the imaginary part.
is the acoustic wavelength in the center position of the hydrophone pair; (a) the real part and (b) the imaginary part.Fig. 2에서 보듯이 해양환경에서 코히런스함수는 청음기 쌍의 자세각에 따라 극명하게 변화한다. 이러한 변화가 나타나는 이유는 해양환경에서 해수면배경소음원의 분포가 비대칭적이기 때문이다. 만약에 청음기 쌍의 중심에 대해 소음원의 분포가 대칭적이라면, 코히런스함수는 청음기 쌍의 자세각에 독립적으로 거동할 것이다.
Fig. 2(a)를 보면,  가 0에 가까울수록 코히런스 함수는 1에 가깝다. 이는 각각의 청음기에 수신되는 신호가 서로 거의 똑같다는 것을 의미한다. 그리고 Fig. 2(b)에서 청음기 쌍의 자세각이 90°에 가까워져서 해수면과 수평하게 됨에 따라, 허수성분의 값은 전체적으로 0에 가까워지는 것을 볼 수 있다. 청음기 쌍이 해수면과 수평하다면 각각의 청음기에 들어오는 소음은 Fig. 1의 z축에 대해 축대칭을 띠게 된다. 즉 소음신호의 대칭성이 존재하기 때문에 sin 성분으로 구성된 허수부는 0이 되게 된다. 그리고 대칭성이 존재할 때 두 개의 청음기 사이의 상관성도 높아지기 때문에, 실수부의 값도 가장 크기가 큰 것을 볼 수 있다. 또한, Fig. 2에서 실수부보다는 허수부가 청음기 쌍의 자세에 따라 뚜렷하게 위상반전을 하는 것을 확인할 수 있다. 이러한 특성은 코히런스함수를 이용하여 자세각을 추정하는 문제를 풀 때 응용할 수 있을 것이다. 또한, Fig. 2의 코히런스함수의 거동은 마치 파동과 비슷하게 양수와 음수 사이에서 변동한다는 것을 관찰할 수 있다. 이는 Eq.(2)의 커널이 기본적으로 평면파에 대한 적분 형태로 이루어졌기 때문에 적분 식에서도 파동특성이 관찰되는 것이다.
가 0에 가까울수록 코히런스 함수는 1에 가깝다. 이는 각각의 청음기에 수신되는 신호가 서로 거의 똑같다는 것을 의미한다. 그리고 Fig. 2(b)에서 청음기 쌍의 자세각이 90°에 가까워져서 해수면과 수평하게 됨에 따라, 허수성분의 값은 전체적으로 0에 가까워지는 것을 볼 수 있다. 청음기 쌍이 해수면과 수평하다면 각각의 청음기에 들어오는 소음은 Fig. 1의 z축에 대해 축대칭을 띠게 된다. 즉 소음신호의 대칭성이 존재하기 때문에 sin 성분으로 구성된 허수부는 0이 되게 된다. 그리고 대칭성이 존재할 때 두 개의 청음기 사이의 상관성도 높아지기 때문에, 실수부의 값도 가장 크기가 큰 것을 볼 수 있다. 또한, Fig. 2에서 실수부보다는 허수부가 청음기 쌍의 자세에 따라 뚜렷하게 위상반전을 하는 것을 확인할 수 있다. 이러한 특성은 코히런스함수를 이용하여 자세각을 추정하는 문제를 풀 때 응용할 수 있을 것이다. 또한, Fig. 2의 코히런스함수의 거동은 마치 파동과 비슷하게 양수와 음수 사이에서 변동한다는 것을 관찰할 수 있다. 이는 Eq.(2)의 커널이 기본적으로 평면파에 대한 적분 형태로 이루어졌기 때문에 적분 식에서도 파동특성이 관찰되는 것이다.
IV. 해양환경의 특성에 따른 변화
본 절에서는 천해와 심해에서 해저퇴적층의 음속이 달라질 때 코히런스함수의 변화를 관찰했다. 천해는 수심 60 m의 Pekeris 도파관을 가정했고, 심해는 수심 2000 m의 동해여름음속을 갖는 해양환경을 가정했다. 해저퇴적층은 진흙, 모래, 굵은 모래로 가정했으며, 각각의 음속은 1490 m/s, 1690 m/s, 1890 m/s이다. 해저 퇴적층 감쇠계수는 0.3 dB/λ로 놓았다. 청음기 쌍은 z축과 평행하게 해저에 수직으로 놓여 있으며 청음기 쌍의 위치는 수심 30 m이다. 천해 환경에서 음선은 전형적인 등속도 음선 전파를 한다. 심해 환경에 대해서는 Fig. 3에 음선추적결과를 도시했다. 동해여름음속은 해수면에서 수심이 증가할수록 감소하다가 일정깊이에서 다시 증가하는 특성을 보인다. Fig. 3에서 보듯이 음선 구조는 음원의 깊이에 따라 변화한다. 음원이 해수면에 위치해 있으면 ‘해저바닥 반사-해수면 굴절’을 하는 음선이 지배적이고, 음원의 수심이 깊어짐에 따라 수층에서 굴절을 하는 음선이 많아진다.
|
Fig. 3. Propagating rays in the ocean environment with the summer sound speed profile of East Sea. (a) Source depth of 30 m and (b) 200 m. The shooting angle of rays is from –23° to 23°. |
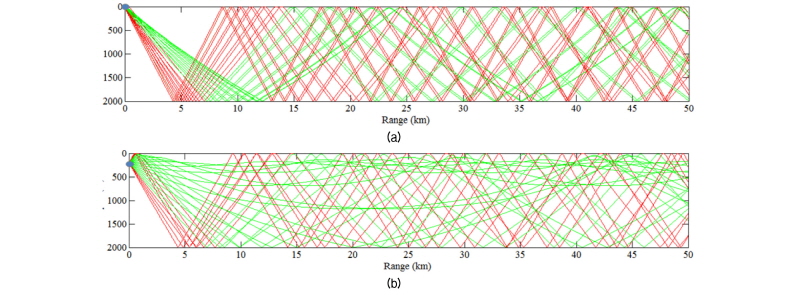
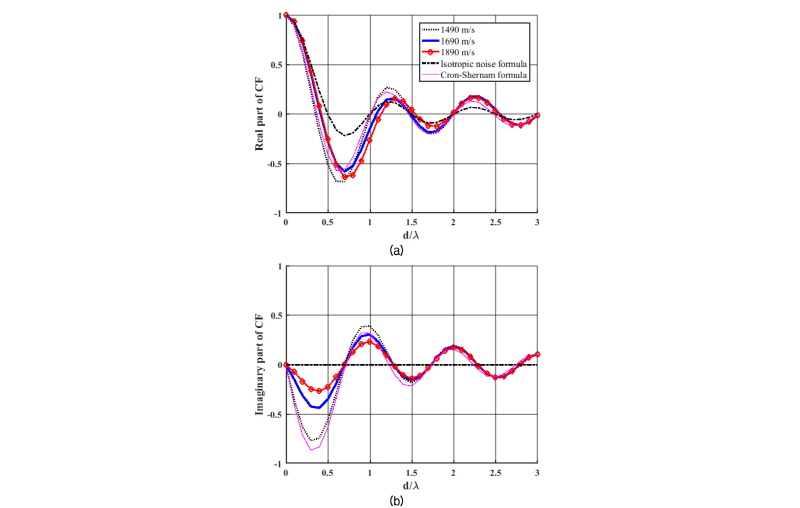
Fig. 4는 천해에서  와 해저퇴적층 음속에 대한 코히런스함수의 결과를 보여준다. 수치결과와의 비교를 위해 반무한영역에 대한 Cron과 Sherman의 해석적인 결과[5]와 등방성 소음원에 대한 결과를 추가했다. Fig. 4(a)는 퇴적층 음속에 따른 코히런스함수의 실수부를 보여준다. 낮은
와 해저퇴적층 음속에 대한 코히런스함수의 결과를 보여준다. 수치결과와의 비교를 위해 반무한영역에 대한 Cron과 Sherman의 해석적인 결과[5]와 등방성 소음원에 대한 결과를 추가했다. Fig. 4(a)는 퇴적층 음속에 따른 코히런스함수의 실수부를 보여준다. 낮은  의 영역에서 해저퇴적층이 단단해짐에 따라 코히런스함수의 값이 커지는 것을 확인할 수 있다. 하지만 그림에서 보듯이 코히런스함수의 크기는 퇴적층음속의 크기와 정확하게 비례하는 것은 아니다. 이는 Eq.(2)의 코히런스 함수가 정규화 된 형태이기 때문이다. 본 논문에 싣지는 않았지만, 코히런스함수가 아닌 교차스펙트럴밀도를 그려보면 명확하게 퇴적층음속의 크기가 클수록 교차스펙트럴밀도의 값이 커진다. 해양 도파관의 해저 퇴적층음속이 빠를수록 소음이 전반사 되는 영역이 넓어지기 때문에 교차스펙트럴밀도의 값도 커지게 되는 것이다.
의 영역에서 해저퇴적층이 단단해짐에 따라 코히런스함수의 값이 커지는 것을 확인할 수 있다. 하지만 그림에서 보듯이 코히런스함수의 크기는 퇴적층음속의 크기와 정확하게 비례하는 것은 아니다. 이는 Eq.(2)의 코히런스 함수가 정규화 된 형태이기 때문이다. 본 논문에 싣지는 않았지만, 코히런스함수가 아닌 교차스펙트럴밀도를 그려보면 명확하게 퇴적층음속의 크기가 클수록 교차스펙트럴밀도의 값이 커진다. 해양 도파관의 해저 퇴적층음속이 빠를수록 소음이 전반사 되는 영역이 넓어지기 때문에 교차스펙트럴밀도의 값도 커지게 되는 것이다.
위의 현상은 가상음원의 관점에서도 기술할 수 있다. 해저 퇴적층의 음속이 빠르다면 해저퇴적층을 맞고 수신되는 소음의 크기가 커지게 되고, 그로인해 마치 가상의 음원이 해저면에 중층적으로 깔려있는 효과를 준다. 이는 마치 소음원이 해수면과 해저면에 모두 분포해 있는 것과 유사하다. 그 결과 수직으로 위치한 두 개의 청음기에 수신되는 신호의 대칭성이 높아진다. Fig. 4(b)를 보면 코히런스함수의 허수부는 해저 퇴적층이 단단해질수록 혹은 대칭성이 증가할수록, 점점 0에 가까워지는 것을 볼 수 있다.
해저 퇴적층 음속에 따른 코히런스함수의 변화는 II절에서 청음기 쌍의 자세각에 따른 코히런스함수의 변화와 비슷한 면이 있다. 그렇기 때문에 코히런스함수를 이용한 역산문제를 다룰 때, 환경변수인 해저 퇴적층 음속과 청음기 쌍의 자세각은 서로 의존적인 변수가 될 수 있다는 것을 유추할 수 있다.
한편, Fig. 4에서 진흙에서 계산한 코히런스함수는 Cron과 Sherman의 해석적인 결과와 거의 일치하는 것을 확인할 수 있다. 이는 진흙에서는 전반사가 존재하지 않고 해저면 손실 값이 매우 크기 때문에 마치 반무한영역과 같은 효과를 주기 때문이다.
 and the ocean sediment sound speed in the shallow water of Pekeris waveguide. Three ocean sediment sound speeds are chosen in the numerical calculation, representing mud (1490 m/s), medium sand (1690 m/s), and coarse sand (1890 m/s). In addition, the Cron-Sherman formula for a half-space is plotted together for the comparison with numerical results: (a) the real part and (b) the imaginary part.
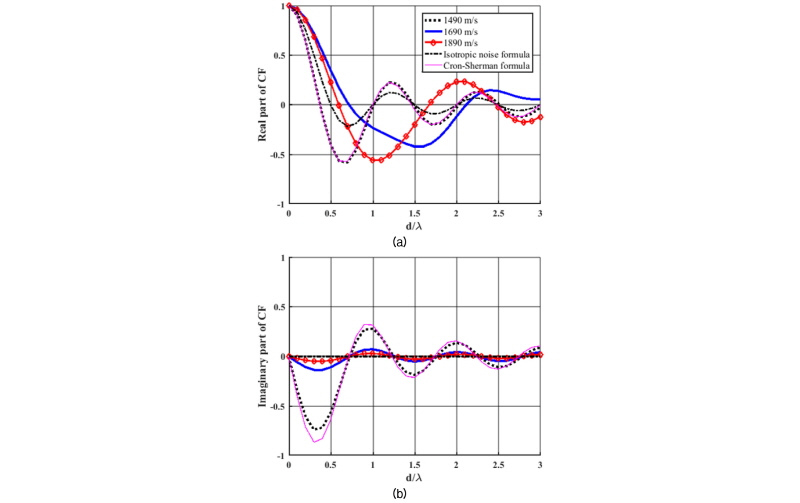
and the ocean sediment sound speed in the shallow water of Pekeris waveguide. Three ocean sediment sound speeds are chosen in the numerical calculation, representing mud (1490 m/s), medium sand (1690 m/s), and coarse sand (1890 m/s). In addition, the Cron-Sherman formula for a half-space is plotted together for the comparison with numerical results: (a) the real part and (b) the imaginary part.Fig. 5는 심해에서의 결과를 보여준다. 청음기 쌍의 위치는 수심 30 m이다. Fig. 5(a)를 보면 해저 퇴적층음속에 따른 코히런스함수의 실수부의 변화크기가 작은 것을 확인할 수 있다. 동해여름음속에서 수심 30 m에는 해수면 근처에 분포한 소음원에서 낮은 수신각으로 입사하는 음선이 존재하지 않는다(Fig. 6). 이 때문에 소음코히런스에 지배적인 성분은 먼거리의 소음원보다는 청음기 쌍이 위치한 주변 해역의 소음원에서 수직에 가깝게 수신되는 성분이 된다. 그리고 수직에 가깝게 수신되는 성분 중에, 해저면으로부터 수신되는 성분은 큰 반사손실과 깊은 수심에 의한 거리확산 때문에 상대적으로 에너지가 작다. 그렇기 때문에 코히런스함수에 지배적인 주요 소음은 청음기 쌍 근처의 해수면에서 유입된다고 판단할 수 있다. 이와 같은 현상은 Cron과 Sherman의 해석해와 해저 퇴적층음속에 따른 수치해가 유사한 것을 봐도 유추할 수 있다. 또한, 최근의 Barclay와 Buckingham[8]이 마리아나 해구 근처에서 실험한 결과를 보면 역시 Cron과 Sherman의 해석해와 매우 유사하게 나오는 것을 확인할 수 있다.
Fig. 5(b)의 코히런스함수의 허수부는 천해에서와 마찬가지로 해저 퇴적층음속이 빠를수록 작아지는 경향을 보인다. 그러나 정량적인 크기는 심해에서의 값이 더 큰 것을 알 수 있다.
 and the ocean sediment sound speed in the deep water. Three ocean sediment sound speeds are chosen in the numerical calculation, representing mud (1490 m/s), medium sand (1690 m/s), and coarse sand (1890 m/s). The Cron-Sherman formula and the numerical solution for a half-space with varying water sound speed are plotted together for the comparison with others: (a) the real part and (b) the imaginary part.
and the ocean sediment sound speed in the deep water. Three ocean sediment sound speeds are chosen in the numerical calculation, representing mud (1490 m/s), medium sand (1690 m/s), and coarse sand (1890 m/s). The Cron-Sherman formula and the numerical solution for a half-space with varying water sound speed are plotted together for the comparison with others: (a) the real part and (b) the imaginary part.Fig. 6은 수신각도 별 상대적인 소음인텐서티를 보였다. 수치해석에 사용된 해양환경조건은 Fig. 4와 같다. 추가로 청음기 쌍의 수심에 따른 효과를 보기 위해 수심을 30 m 및 200 m로 변화시켰다. 상대적인 소음인텐서티는 II절에서 서술한 후처리 과정을 통해 얻었다. Fig. 6에서 보면 약 -17°에서 17° 사이에는 소음이 수신되지 않는 것을 볼 수 있다. 이것은 해당각도에서는 해수면소음원과 청음기 쌍 간의 음선 경로가 존재하지 않음을 의미한다. 이 영역에서는 음선이 해수면에 도달하기 전에 굴절을 하기 때문에, 소음차단효과가 나타나는 것이다. Fig. 6에서 보면 이러한 소음차단 효과는 청음기 쌍의 깊이에 의존하는 것을 볼 수 있다. Fig. 6에서 청음기 쌍의 깊이가 수심 30 m일 때보다 200 m일 때 소음차단영역이 커지는 것을 볼 수 있다. 이것은 동해여름환경의 특징으로 깊이가 증가함에 따라 해수면에 도달하지 않고 수중에서 굴절하는 영역이 커지기 때문이다.
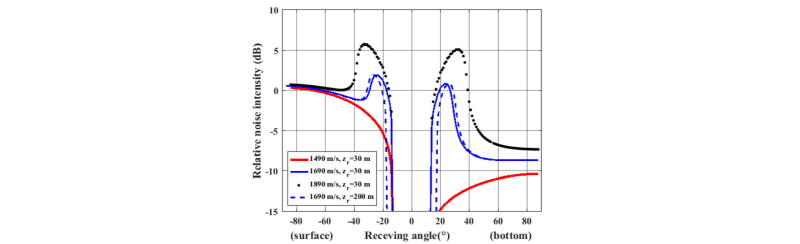
또한, Fig. 6에서 상부방향에서 수신되는 소음인텐서티와 하부방향에서 수신되는 소음인텐서티 간에 비대칭성을 볼 수 있다. 이것은 기하학적으로 소음원이 해수면에 있을 때, 하부방향에서 수신되는 소음은 상부방향에서 수신되는 소음보다 해저 퇴적층을 한 번 더 맞고 오므로 손실이 더 발생하기 때문이다. 특히 빠른 해저 퇴적층의 경우에는 소음차단효과가 발생하는 영역의 양 끝으로 봉우리가 나타나는 것을 볼 수 있다. 동일한 선분에 대해 좌측과 우측의 봉우리의 준위 차이는 1 - 2 dB 이내로 상부와 하부방향의 손실 차이가 크지 않다는 것을 알 수 있다. 이것은 해당 수신각의 음선이 해저면에서 전반사를 하기 때문에 해저 퇴적층을 맞아도 상대적으로 반사손실이 적기 때문이다. 봉우리를 벗어나면 상부와 하부방향의 소음인텐서티의 차이가 약 8 dB 이상으로 커지는 것을 확인할 수 있다. 해당 영역에서는 청음기 쌍에 수신되는 음선이 비교적 수직방향에 가깝게 들어오기 때문에, 전반사영역과는 달리 수중과 해저 퇴적층의 임피던스 차이에 의해 반사손실이 커지기 때문이다.
추가적으로 해저 퇴적층 감쇠계수의 영향을 살펴보았다. 해양환경은 해저퇴적층의 영향이 크게 나타났던 천해환경의 모래 해저퇴적층으로 설정하였고 감쇠계수를 0.1 , 0.3, 0.5 dB/λ로 변화시켜가며 관찰하였다. Fig. 7에서 보면 감쇠계수의 변화에 따라서도 소음의 코히런스가 일정부분 변하는 것을 확인할 수 있다. 그러나 해저 퇴적층음속보다는 그 변화의 크기가 작았다. 퇴적층 음속이 변화하면 임계각이 변화하고 전체적으로 해저면 반사계수의 형태가 크게 변화하지만, 감쇠계수의 변화는 전반사영역에서 국소적으로 영향을 미치기 때문이다.
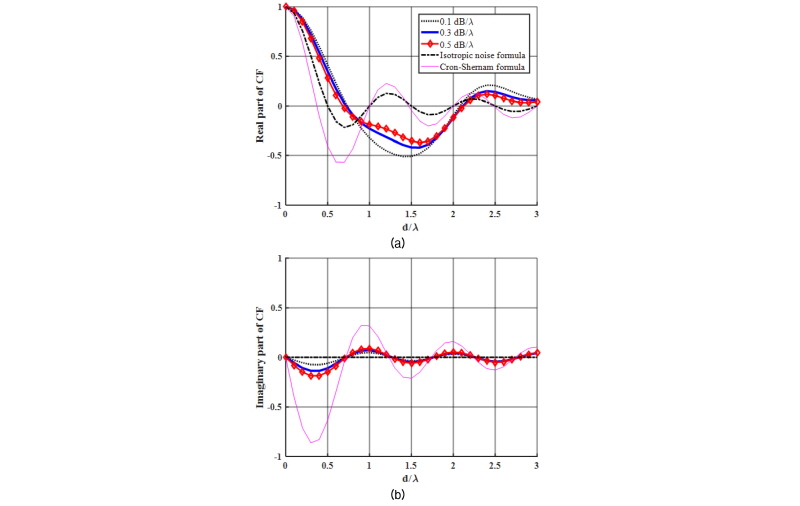
 and the ocean sediment attenuation in the shallow water of Pekeris waveguide. Three ocean sediment attenuations are chosen in the numerical calculation of 0.1, 0.3 and 0.5 dB/λ. Additionally, the Cron-Sherman formula for a half- space is plotted together for the comparison with numerical results: (a) the real part and (b) the imaginary part.
and the ocean sediment attenuation in the shallow water of Pekeris waveguide. Three ocean sediment attenuations are chosen in the numerical calculation of 0.1, 0.3 and 0.5 dB/λ. Additionally, the Cron-Sherman formula for a half- space is plotted together for the comparison with numerical results: (a) the real part and (b) the imaginary part.V. 결론 및 토론
본 연구에서는 중고주파 해수면 배경소음 예측모델 소개했다. 또한 해당 모델을 수치적으로 구현할 때의 고려사항에 대해 서술하고 천해 및 심해 환경에 대한 수치해석을 수행했다.
음선 기반의 중고주파 해수면 배경소음 모델은 기존의 준해석법 모델에 비해 복잡한 해양환경에 적용할 수 있는 범용성을 가지나, 대신에 수신각에 대한 소음인텐서티를 보여주지는 못했다. 본 연구에서는 음선기반 수치모델에서도 후처리 과정을 통해 수신각에 대한 소음인텐서티를 계산할 수 있음을 보였다. 수치해석 결과는 Cron과 Sherman의 해석해와 비교하여 동일한 결과를 주는 것을 확인했다. 또한 수치해에 나타나는 여러 가지 특징은 해양환경의 음향학적 특성과 잘 일치하는 것을 볼 수 있다.
최근 미국에서는 해양소음간섭법[9]을 발전시켜 지음향 역산이나 음향측심에 활용하고 있다. 해양소음간섭법에 사용하는 소음교차상관함수는 본 연구주제인 코히런스함수와 푸리에 변환 쌍을 이룬다. 따라서 주파수 영역의 코히런스함수에도 해양소음간섭법에서 개척한 여러 응용분야들을 적용할 수 있을 것이다. 궁극적으로 해수면 생성 배경소음 코히런스함수는 소나를 이용하는 플랫폼에 별다른 비용 없이 주변 환경정보를 제공하는 유용한 수단이 될 것이라 생각한다.
