

I. 서 론
정합장 처리(Matched-Field Processing)[1]는 수중에서의 음원 위치(거리 및 심도)를 추정하는 기법으로, 1970년대 Bucker[2]에 의해 처음 도입된 이후 지금까지도 다양한 연구가 진행되고 있다. 이 방법은 기존의 평면파 기반 빔형성 기법과 달리, 복잡한 해양 음향 환경을 보다 정밀하게 반영할 수 있는 파동 방정식의 해를 이용한다는 점에서 차별된다. 따라서 정합장 처리는 평면파 가정을 넘어서는 배열 처리 기법의 확장 형태로 간주된다.
정합장 처리는 수직 또는 수평 배열을 통해 수신된 음향 신호 벡터와, 가정된 음원 위치에서 계산된 이론적 음장 벡터 간의 상관성을 비교함으로써 음원의 위치를 추정한다. 이 과정에서 높은 정밀도의 추정을 달성하기 위해서는 음속 분포, 수심, 해저 지형, 지음향 특성, 배열의 기울기 등 다양한 해양 환경 변수에 대한 정확한 정보가 요구된다. 그러나 이러한 변수들에 대한 불확실성 또는 오차는 모델 오정합을 야기할 수 있으며, 결과적으로 정합장 처리의 성능을 현저히 저하시킬 수 있다. 특히 배열이 기울어졌거나 기하학적 형상이 변형된 경우, 수신 데이터와 계산된 음장 벡터 사이의 상관성이 감소함에 따라 위치 추정의 정확도에도 부정적인 영향을 줄 수 있다.
배열 기울기 오정합 문제는 환경 변수 오정합 문제 해결을 위해 활용된 대표적인 접근 방식[3]을 기반으로, 기존의 배열 기울기 보정 방식을 적용함으로써 해결할 수 있다.[4,5,6] 기존의 배열 기울기 보정 방식은 다양한 기울기 각도에 대해 음장 벡터를 사전 계산하고, 수신 데이터와의 상관도를 비교하는 방식이며, 이를 활용하면 배열 기울기를 보정할 수 있다. 그러나 이러한 방식은 다수의 기울기 각도에 대해 각각 음장 벡터를 계산해야 한다는 한계가 있다. 이에 따라, 모델 오정합 문제를 극복하기 위해 적응형 정합장 처리 방법에 대한 연구가 활발히 이루어지고 있다.
본 논문에서는 기존 방식과는 달리, 위상 보정을 기반으로 배열 기울기 오정합을 보정하는 새로운 저연산 기법을 제안한다. 제안된 기법은 천해 거리 독립 환경과 저주파 조건(< 1 kHz)을 전제로 하며, 정상 모드 이론에 기반하여 배열 기울기로 인해 발생하는 위상 왜곡을 수신 데이터 벡터 또는 음장 벡터에 복소 지수 함수 형태로 보상함으로써, 별도의 음장 벡터 재계산 없이 위상 정합을 달성할 수 있도록 설계되었다. 보정 각도는 수신 데이터와 음장 벡터 간의 상관도가 최대가 되는 조건으로 선택되며, 상관도 평가에는 Peak-to-Background Ratio(PBR)가 활용된다. 이로써 기존 방식과 유사한 위치 추정 정확도를 유지하면서도, 연산량은 크게 줄일 수 있다.
이 기법의 유효성은 실제 해상 실험 데이터를 통해 검증하였다. 약 4 h에 걸친 시간 구간에 대한 위치 추정 성능을 분석함으로써, 제안 기법의 시간 변화에 따른 위치 추정 성능과 실해역 데이터에 대한 적용 가능성을 종합적으로 평가하였다. 또한, 위치 추정 정밀도 측면에서는 기존 보정 방식과 유사한 수준의 성능을 유지하였으며, 계산 효율성 면에서는 제안한 보정 기법의 우수성을 확인할 수 있었다.
논문의 구성은 다음과 같다. II장에서는 정상 모드 이론에 기반한 제안 기법의 원리와 적용 방식을 설명한다. III장에서는 Shallow-water Acoustic Variability EXperiment 2015(SAVEX15) 환경을 설명하고, IV장에서는 실험 데이터를 이용한 단일 시점 및 전체 시간 구간에 대한 위치 추정 결과를 논의한다. 마지막으로 V장에서는 본 연구의 결론을 제시한다.
II. 위상 보정 방법
거리 독립적인 환경에서의 Green’s function의 정상모드 해는 다음과 같이 정의된다.[7]
여기서 는 각각 수평거리, 깊이, 주파수를 나타내며, 은 번째 모드의 수평 파수이다. 또한, 은 번째 모드에 따라 달라지는 값으로, 아래와 같이 표현된다:
여기서 는 직교 정규 모드 함수이며, 는 음원의 깊이를 나타낸다. 표기법을 단순화하기 위해, 본 논문의 나머지 부분에서는 깊이 변수인 와 를 생략한다. 이를 통해 Green’s function을 진폭[Eq. (4)]과 위상[Eq. (5)]의 형태로 아래와 같이 나타낼 수 있다.
여기서 은 수평 모드 파수 쌍 간의 간섭 차이를 의미한다. Eqs. (4)와 (5)를 이용하면 거리 에서의 위상 변화율 𝜉를 정의할 수 있다[Eq. (6)]:
추가적으로 가중 최소자승법을 이용하여 을 가중 함수로 할 때 얻을 수 있는 의 평균 값을 고려하면 다음과 같다.
여기서 는 수평 파수의 평균값을 의미한다. 거리 이 모드의 간섭 길이보다 충분히 큰 경우, 즉 조건이 성립한다고 가정하면, 항은 크로네커 델타 함수에 수렴할 수 있다. 이러한 조건이 충족되는 경우, 평균 수평 파수는 평균 위상 속도 로 부터 로 정리될 수 있다. 여기서, 는 Eq. (7)에서 유도된 평균 위상 속도이다.
여기서 는 번째 모드의 위상 속도를 나타낸다. 이상적인 도파관에서 차단 주파수로부터 멀리 떨어진 모드의 경우 가 성립한다. 따라서 이상적인 도파관에서 평균값 를 사용하는 것이 타당하다.
따라서, 평균 수평 파수 와 번째 모드의 수평 파수 은 수평 파수 와 근사적으로 동일하다고 가정할 수 있으며, 이는 아래와 같이 나타낼 수 있다:[8,9,10,11,12]
Eq. (1)에 Eq. (9)를 적용하면 Eq. (1)을 아래와 같이 다시 표현할 수 있다:
이제 Eq. (10)을 기반으로 배열 기울기가 존재했을 때의 Green’s function을 표현하기로 한다. 여기서 배열 기울기는 수직선 배열(Vertical Line Array, VLA)로부터 만큼 수평으로 이동한 것으로 정의하며, 은 배열 기울기 각도에 따라 결정된다. Eq. (10)에서 대신 +대입하고 진폭의 변화는 무시할 수 있다고 가정하면, 아래와 같이 표현할 수 있다:
Eq. (11)은 배열 기울기가 존재하는 환경의 Green’s function과 기울기가 존재하지 않는 환경의 Green’s function 사이의 관계를 보여주며, 간단한 연산을 통해 기울기 발생을 모의할 수 있음을 보여준다.
최종적으로 배열 기울기에 의해 발생하는 위상 왜곡은 Eq. (11)에 을 곱함으로써 보정할 수 있으며, 이는 Eq. (12)와 같이 정의 할 수 있다:
III. SAVEX15 실험
본 논문에 활용한 SAVEX15[13] 해상 실험은 2015년 5월, 동중국해 북동부 해역에서 연구선 온누리호(R/V Onnuri)를 이용하여 수행되었다. 해상 실험이 수행된 해역의 수심은 거의 약 100 m로 평탄하며, 고정 및 예인된 음원을 이용한 음향 송신은 1 km ~ 10 km 범위 내에 계류된 두 개의 수직선 배열(Vertical Line Array, VLA)을 대상으로 수행되었다.
위상 보정 방법의 유효성을 검증하기 위해, JD 145(5월 25일) 동안 약 4 h(15:45–19:35 UTC)에 걸쳐 수행된 음원 예인 실험 데이터를 활용하였다. 실험 개요는 Fig. 1에 나타나 있으며, 해저 고정형 수직선 배열은 총 16개 센서로 구성되었고, 센서 간격은 3.75 m로 전체 배열 길이는 56.25 m이다. 배열은 수심 25 m부터 81.25 m까지 수직으로 배치되었다. 본 논문에서는 배열 기울기 각도를 수평 평면 기준으로 반시계 방향 회전을 양(+)의 기울기, 시계 방향 회전을 음(-)의 기울기로 정의하였다.
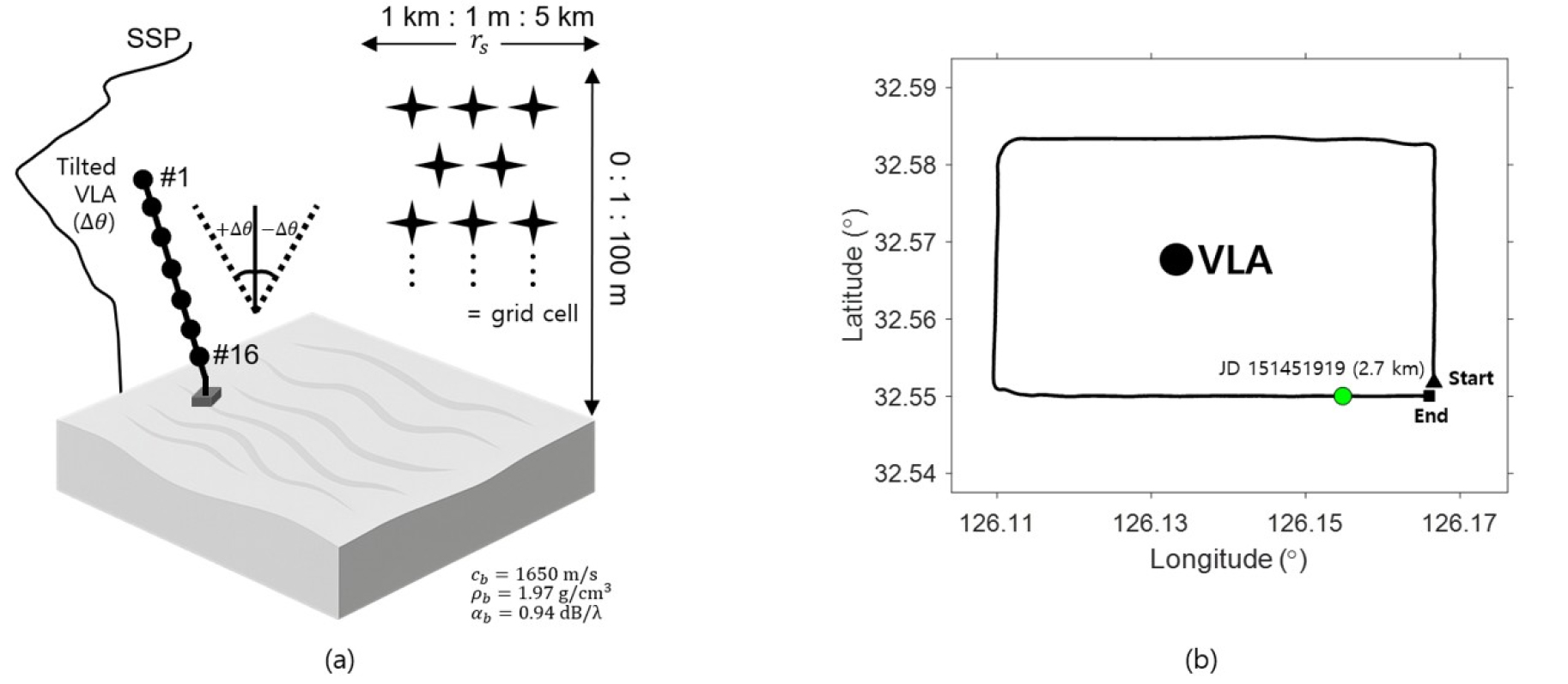
Fig. 1.
Schematic of the experiment conducted on JD 145 (May 25) during the source-tow run using the R/V Onnuri. (a) A 16 element, 56.25 m long, bottom-moored VLA in about 100 m deep water recorded the ship-radiated noise (200 Hz - 900 Hz). The Sound Speed Profile (SSP) was obtained by averaging CTD measurements on the same day. (b) GPS-based ship track of the R/V Onnuri circling the VLA counter-clockwise at an average speed of 1.5 m/s over a 4 hour period (15:45-19:35 UTC). The green circle marks the ship position at a 2.7 km range from the VLA (19:19 UTC).
음속 구조는 JD145(5월 25일) 전후의 Conductivity, Temperature, and Depth(CTD) 자료 평균을 나타내며, 약 40 m 수심에서 음향 축이 형성되었음을 알 수 있다. Fig. 1(b)는 4 h 동안의 선박의 항적 정보(검은색 선)가 도시되어 있으며, 시작 및 종료 시점이 각각 삼각형과 사각형 기호로 표시되어 있다.
실험 동안 연구선 온누리호 선박은 두 개의 광대역 음원(3 kHz ~ 10 kHz 및 12 kHz ~ 26 kHz)을 수심 50 m에서 동시에 예인하였으며, 주로 약 3 kn(1.5 m/s)의 속도로 이동하였다. 본 연구에서는 1 kHz 이하의 저주파 대역에서 방사되는 선박 소음을 기반으로 음원 위치를 추정하는 데 초점을 맞추었다.[14]
다음 장에서는 본 실험 데이터를 바탕으로 제안한 기법의 유효성을 분석한 결과를 제시한다.
IV. 실험 결과
4.1 단일 시점 위치 추정 성능 분석
본 절에서는 Fig. 1(b)에 표시된 초록색 원으로 나타낸 시점(JD151451919)에서 수신 데이터를 기반으로, 제안한 위상 보정 기법의 단일 시점 위치 추정 성능을 평가하였다. Fig. 2(a)-(c)는 기존 방식에 의한 결과로써, 제안 기법과 비교하기 위해 제시된 그림이다. 기존 방법의 결과는 두 방법 간 유사성을 시각적으로 보여주는 데 목적이 있으며, 별도의 설명은 생략하였다. 이후의 분석은 제안 기법 결과를 나타낸 Fig. 2(d)-(f)를 중심으로 진행된다.
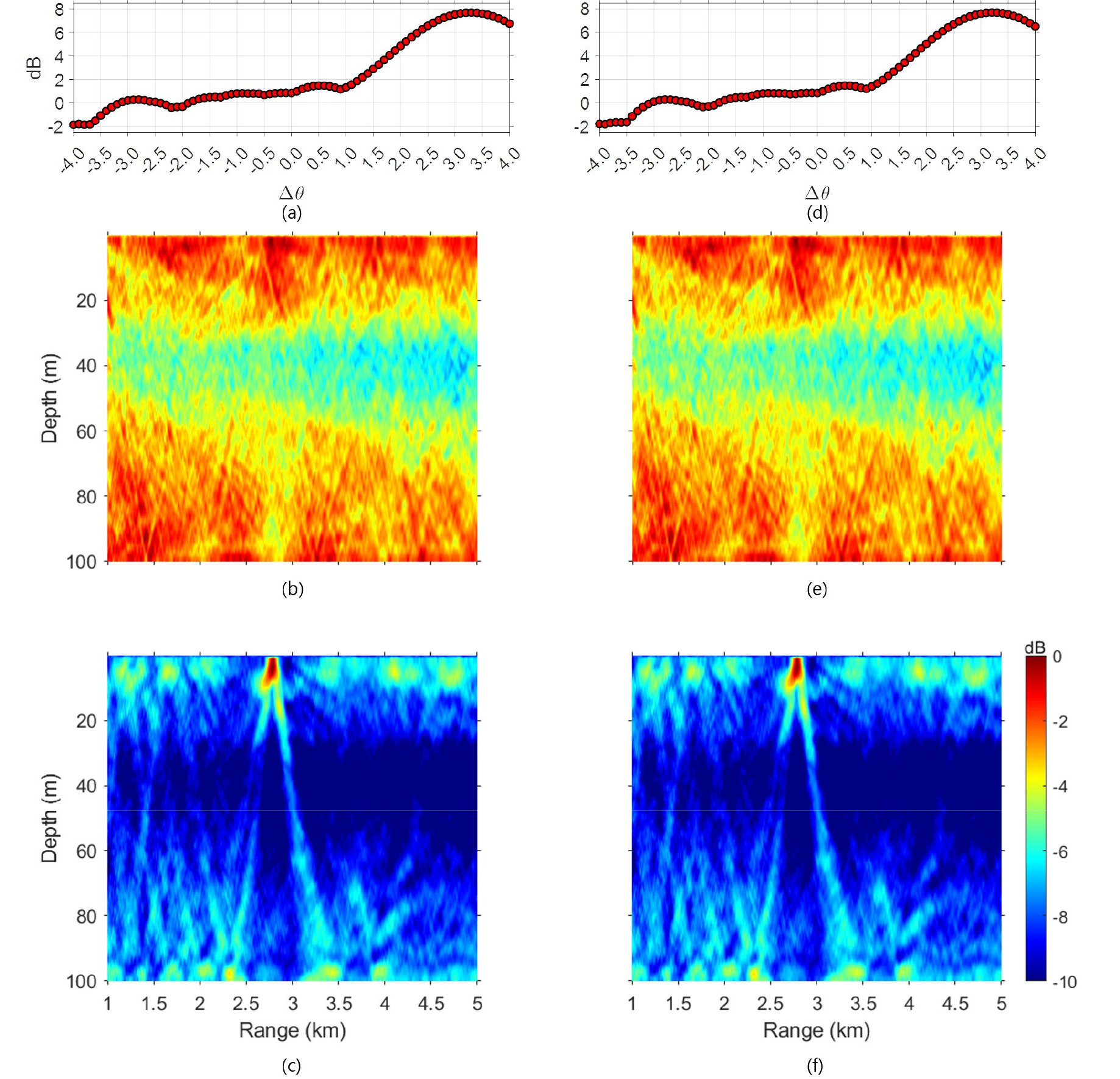
Fig. 2.
(Color available online) Localization results of the conventional MFP method [left: (a)-(c)] and the proposed phase compensation method [right: (d)-(f)] at a specific time instance (JD151451919). The same 2-s long, ship-radiated noise (200 Hz ~ 900 Hz), recorded from 25 s ~ 27 s at the time marked by the green circle in Fig. 1(b), is used. (a), (d) PBR values computed over candidate tilt angles ranging from -4° to +4° in 0.1° increments. The optimal tilt angle is selected based on the maximum PBR. (b), (e) Ambiguity surface without tilt compensation. A significant sidelobe structure appears due to the array tilt, and the source cannot be unambiguously localized. (c), (f) Ambiguity surface after tilt compensation. A distinct global peak appears at = 2.7 km near the surface (depth ≈ 5 m), clearly indicating successful localization. The outputs are incoherently averaged over the bandwidth (200 Hz ~ 900 Hz) at 20 Hz intervals.
JD151451919 시점의 위치는 VLA로부터 약 2.7 km 떨어져 있으며, 해당 시점의 1 min 데이터 중 2 s 구간(25 s ~ 27 s)에 해당하는 선박 소음 데이터(200 Hz ~ 900 Hz)를 분석에 활용하였다. 배열 기울기는 –4°부터 +4°까지 0.1° 간격으로 변화시키며 제안 기법의 유효성을 평가하였고, 수신 신호와 비교할 음장 벡터는 KRAKEN 정상 모드 모델을 이용해 수치적으로 계산하였다.
모델 계산에 사용된 지음향인자는 해저의 음속 , 밀도 , 감쇠 계수 로 설정하였다.[15] 이러한 파라미터는 실제 수신 데이터와의 비교를 통해 제안 기법의 유효성을 평가하는 데 활용되었다. Ambiguity surface는 거리 및 깊이에 따라 계산되며, Fig. 1(a)에 제시된 환경 모델을 바탕으로 거리 1 km ~ 5 km, 깊이 0 m ~ 100 m 범위에서 각각 1 m 간격의 격자 위에서 평가되었다.
표본 공분산 행렬을 구성하기 위해 앞서 언급한 2 s 구간의 데이터를 사용하였으며, 각 스냅샷은 16,384포인트 길이의 FFT를 적용하여 생성하였다. 이때 Kaiser 창 함수(window function, 𝛼=2.5)를 적용하였고, 인접한 스냅샷 간에는 50 %의 중첩을 적용하였다. 이러한 조건에서 총 23개의 스냅샷을 이용하여 표본 공분산 행렬을 계산하였다.
Fig. 2(e)와 (f)는 19:19 UTC 시점(거리 2.7 km)에서의 정합장 처리 결과를 나타낸다. Ambiguity surface는 전체 대역폭(200 Hz ~ 900 Hz)에 대해 20 Hz 간격으로 나누어 계산된 결과를 비상관 평균한 것이다.
이러한 ambiguity surface 결과를 정량적으로 평가하기 위해, 본 논문에서는 서론에서 언급한 바와 같이 PBR을 사용하였으며, 이는 다음과 같은 수식으로 정의된다:[16]
여기서 는 정규화된 주 최대점(main peak)의 값이며, 𝜇는 해당 주 최대점 주변의 특정 범위를 제외한 나머지 영역에 대한 평균 파워 값이다.
Fig. 2(d)는 –4°부터 +4°까지의 배열 기울기에 대해 계산된 PBR 값을 나타낸 것으로, PBR이 최대가 되는 기울기( = 3.2°)가 명확하게 도출됨을 보여준다.
Fig. 2(e)는 배열 기울기 보정을 적용하지 않은 상태에서의 ambiguity surface를 나타낸다. 에너지가 특정 위치에 집중되지 않고 여러 지점에 분산되어 있어, 음원의 위치를 추정하기 어려운 양상을 보인다. 즉, 강한 부엽이 넓은 범위에 걸쳐 존재하여 주 최대점과의 구분이 모호하므로, 결과의 신뢰도가 낮다. 이는 배열 기울기로 인해 발생한 위상 왜곡이 보상되지 않았기 때문이며, 정확한 위치 추정에 제한을 주는 주요 원인으로 작용한다. 반면, Fig. 2(f)는 제 II장에서 제안한 위상 보정 기법을 적용한 결과로, ambiguity surface 상에서 추정된 음원 위치인 약 2.7 km 지점에 뚜렷한 단일 최대점(global peak)이 형성되었고, 주변 영역의 부엽도 효과적으로 억제되었다.
이러한 결과는, 제안한 위상 보정 기법이 음장 벡터를 재계산하지 않고도 배열 기울기로 인한 위상 왜곡을 효과적으로 보상했기 때문이며, 단일 시점 뿐만 아니라 전체 시간 구간에서도 명확하고 신뢰도 높은 위치 추정 결과를 도출하는 데 기여한다. 다음 절에서는 제안한 위상 보정 기법을 약 4 h 구간의 수신 데이터에 적용하여, 시간 변화에 따른 위치 추정 성능을 분석한다.
4.2 전체 시간 구간 위치 추정 성능 분석
본 절에서는 Fig. 1(b)에 제시된 4 h 구간(JD15145 1545–JD1451935) 동안 수신된 데이터를 기반으로, 제안한 위상 보정 기법을 전 구간에 적용한 위치 추정 성능을 분석한다. 전체 구간 동안 1 min 간격으로 약 4 h의 시점에서 데이터를 추출하였으며, 각 시점에 대해 제 4.1절과 동일한 조건 하에 정합장 처리를 수행하였다.
Fig. 3(a)는 전체 시간 구간에 대해 추정된 배열 기울기의 시간적 변화를 나타낸다. 본 기법에서는 –4°부터 +4°까지의 기울기 각도에 대해 각각 PBR을 계산하고, 이 중 최대 PBR을 갖는 각도를 각 시점의 추정 기울기로 선택하였다. Fig. 3(a)의 결과는 추정된 배열 기울기의 시간적 변화 양상을 잘 보여주고 있다.
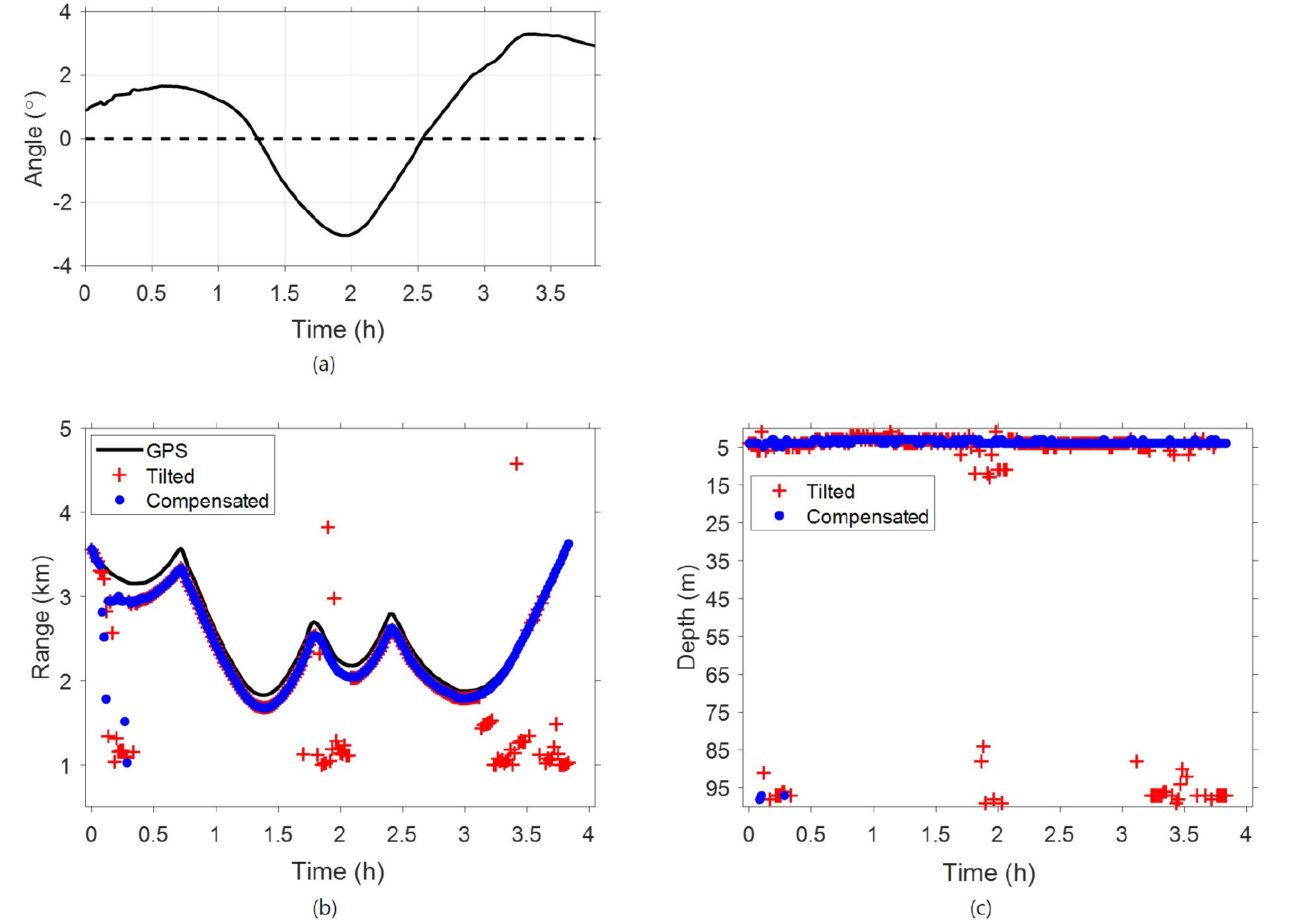
Fig. 3.
(Color available online) Localization results of the R/V Onnuri over the 4 h source-tow period (15:45-19:35 UTC, JD151451545-JD151451935), as depicted in Fig. 1(b). (a) Estimated tilt angle at each 1 min. time point. PBR values were computed over candidate tilt angles from -4° to +4° in 0.1° steps, and the angle with the maximum PBR was selected as the estimated tilt. (b) Source range estimation results. Tilted (+) and Compensated (∙) indicate the range estimates without and with the proposed compensation, respectively. The solid line is based on the ship GPS. A 2-s window of ship-radiated noise (200 Hz ~ 900 Hz) is selected every minute, generating a total of 231 discrete time points. Each Tilted (+) represents the range of the global peak. Without compensation, the source location cannot be reliably estimated, showing significant errors and clustering at incorrect locations. (c) Source depth estimation results. Without compensation, the estimated depth is often far from the actual source depth. With compensation, the depth is consistently estimated near 5 m, closely matching the true deployment condition.
Fig. 3(b)는 시간에 따른 음원 거리 추정 결과를 나타낸다. 데이터 초반 일부 시점을 제외하면, 전체 구간에서 추정 위치는 실제 GPS 기반 선박 위치와 잘 일치하는 양상을 보였다. 0.5 h 이전의 초기 오차는 얕은 웅덩이 구조가 존재하는 해저 지형에서 도파관 특성이 유지되지 않아 거리 추정이 어려워지는 현상에 기인하며, 이는 선행 연구에서도 확인된 바 있다.[17] 뿐만 아니라, 초기 약 2.5 h 구간까지 나타난 10 % 내외의 오차는 ambiguity surface 상의 mirage effect에 기인한 것으로 판단된다. 이러한 오차는 해저 지형 정보의 불일치로 인해 발생하며, 그 결과 정합장 처리에서는 실제보다 짧은 거리에서 잘못된 위치가 추정되는 현상이 나타난다. 이와 같은 양상은 선행 연구에서 알려진 바 있다.[18]
Fig. 3(c)는 시간에 따른 음원 깊이 추정 결과를 나타낸다. Fig. 3(b)와 마찬가지로 초반부 일부 시점을 제외한 전체 구간에서 수심 약 5 m로 추정되었으며, 이는 실험 환경에서 일반적으로 가정된 수심 조건과 잘 부합한다. 이러한 결과는 제안 기법이 배열 기울기로 인한 위상 왜곡을 효과적으로 보상함으로써, 거리와 깊이 양 측면에서 모두 신뢰도 높은 위치 추정이 가능함을 보여준다.
추가로, Fig. 4는 제안 기법과 기존 기법의 위치 추정 정확도를 비교한 결과를 보여준다. 두 방법의 거리 추정 결과를 실제 GPS 기반 선박 위치와 비교한 결과, 전체 시간 구간에서 유사한 수준의 위치 추정 성능을 보였으며, 두 기법 모두 0.5 h 이후 구간에서는 10 % 이내의 거리 오차를 보였다. 즉, 본 연구에서 제안한 기법은 기존 기법과 유사한 수준의 위치 추정 정확도를 유지하면서도, 연산 효율성 측면에서 더욱 우수한 성능을 보였다. 기존 방식은 배열 기울기를 –4°부터 +4°까지 0.1° 간격으로 변화시키며 총 81개의 음장 벡터를 각각 생성해야 하는 반면, 제안 기법은 단 하나의 음장 벡터만을 기반으로 위상 보정을 수행함으로써 유사한 보정 효과를 구현할 수 있다. 이에 따라 음장 벡터 계산에 필요한 연산량이 기존 대비 약 81배 감소하는 효과를 확인할 수 있었다.
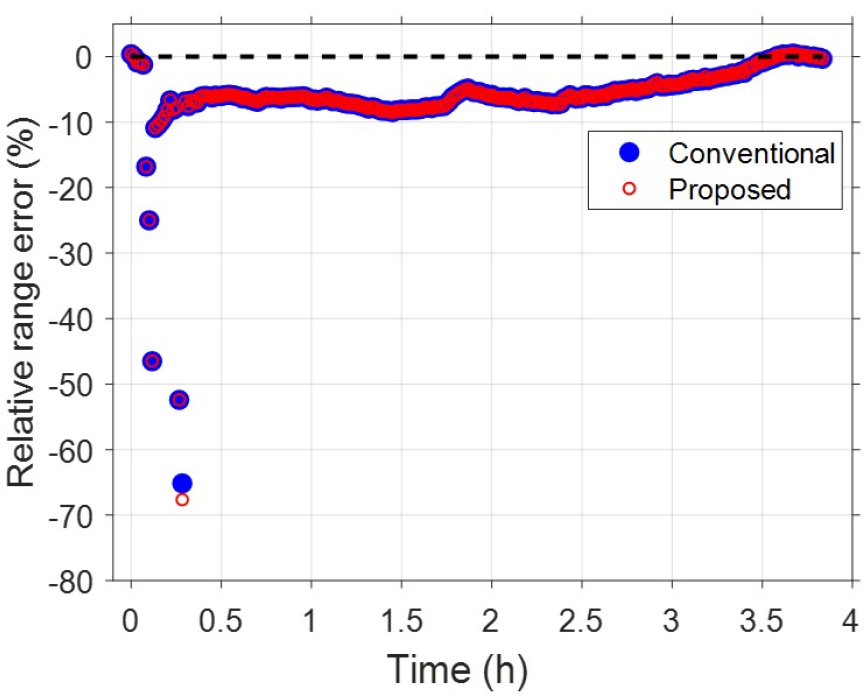
Fig. 4.
(Color available online) Relative range error during the source-tow run. The Conventional method (blue circle) shows the localization result using conventional MFP with replica vectors generated for each candidate tilt angle. The proposed method (red circle) shows the result using the proposed compensation method. The estimated range errors were virtually negligible throughout the entire duration, demonstrating strong agreement between the two approaches.
V. 결 론
본 논문에서는 배열 기울기 오정합이 정합장 처리 기반 위치 추정 성능에 미치는 영향을 분석하고, 이를 보정하기 위한 위상 보정 기법을 제안하였다. 기존 방식은 다양한 기울기 조건에 대한 음장 벡터를 생성하고 이를 수신 데이터와 비교하는 방식으로 높은 연산량이 요구되는 한계가 있었다. 이에 반해, 제안 기법은 배열 기울기로 인해 발생하는 위상 왜곡을 직접 보상함으로써, 별도의 음장 벡터 재계산 과정 없이 배열 기울기 오정합을 효율적으로 보정할 수 있다는 장점을 가진다.
제안 기법의 유효성은 SAVEX15 해상 실험 데이터를 활용하여 검증하였다. 단일 시점 기반 분석에서는 위상 보상 전 ambiguity surface의 주 최대점이 불분명하고 부엽이 강하게 나타났으나, 위상 보정 후에는 중심에 뚜렷한 단일 최대점이 형성되어 위치 추정의 명확성과 신뢰도가 크게 향상됨을 확인하였다. 또한, 전체 4 h 구간에 대해 1 min 간격으로 위치 추정을 수행한 결과, 위상 보정 전에는 배열 기울기 변화에 따라 위치 추정이 불안정하게 나타난 반면, 제안 기법은 시간에 따른 배열 기울기 변화에 일관되게 대응하며 거리 및 깊이 방향 모두에서 안정적이고 일관된 위치 추정 결과를 도출하였다.
이러한 결과는 제안 기법이 배열 기울기 오정합에 강인하며, 실제 해양 환경에서도 안정적인 음원 위치 추정을 가능하게 함을 나타낸다. 또한 수신 데이터 기반의 보정이 가능하다는 점에서, 실시간 처리나 반복 계산을 줄인 경량화된 정합장 처리 구현에도 적용 가능성이 높다.
