I. 서 론
II. 가변 수렴 상수 FxGAL 알고리즘
2.1 FxGAL 알고리즘
2.2 가변 수렴 상수 FxGAL 알고리즘
III. 제안 가변 수렴 상수 FxGAL 알고리즘
IV. 실험 및 결과
V. 결 론
I. 서 론
능동 소음 제어(active noise control)는 같은 크기와 반대 위상을 갖는 2차적인 소음 즉 제어 신호를 생성 하여 초기의 소음과 결합하여 소음들이 제거되는 중첩의 원리를 이용한다.[1] 능동 소음 제어를 위한 기존의 적응 알고리즘들은 시스템 지연 및 음향 경로를 포함한 2차 경로에 의한 시간 지연으로 인해 시스템의 불안정성을 야기 시킨다. 이러한 문제를 해결하기 위해 2차 경로에 의한 시간 지연을 보상 하는 filtered-x 구조가 능동 소음 제어 시스템에 적합하다.[2]
대표적으로 FxLMS(Filtered-x least Mean Square) 알고리즘은 비교적 간단한 구조로 안정적인 수렴 성능을 보장하기 때문에 널리 사용되고 있다.[3] 하지만, 유색 잡음 특성을 갖는 신호의 입력은 수렴 성능 저하의 요인이 된다.[4] 수렴 성능 향상을 위해 유색 입력 신호에도 빠른 수렴 속도를 갖는 FxAP(Filtered-x Affine Projection) 알고리즘이 제안되었다.[5,6] 능동 소음 제어 환경에서 대부분의 소음 신호는 하모닉 성분으로 구성된 협대역 신호이다. 이러한 소음 신호를 제어하기 위해 FxAP를 사용하면 제어 알고리즘의 빠른 수렴 속도를 보장할 수 없다.
이론적으로 LMS와 AP와 같이 TDL(Tapped Delay Line)구조를 가지는 알고리즘에 비해 격자 구조를 가지는 GAL(Gradient Adaptive Lattice) 알고리즘이 협대역 신호 제거에 적합하다.[7-9] 이에 협대역 소음 신호 제어를 위한 FxGAL(Filtered-x GAL) 알고리즘이 제안되었다.[10] 하지만 FxGAL 알고리즘의 수렴 성능은 참조 신호의 통계적 특성과 무관한 특성을 보이며 또한, FxAP에 비해 느린 초기 수렴 속도를 가지므로 최근 수렴 속도를 가변적으로 조절하는 가변 수렴 상수 FxGAL(VSS-FxGAL) 알고리즘이 제안되었다.[11]
이때 VSS-FxGAL 알고리즘에서는 격자 필터의 단일 단계의 정보만을 이용하여 가변 수렴 상수(variable step-size)를 결정하기 때문에 입력 신호의 특성에 따라서 수렴 성능이 저하되는 문제가 발생한다. 이러한 문제를 해결하기 위해 본 논문에서는 각 격자 단계에 적합한 로컬 가변 수렴 상수를 이용하여 수렴 성능을 개선한다.
본 논문의 구성은 2장에서 기존 가변 수렴 상수 기반의 VSS-FxGAL에 대해서 설명하고, 3장에서 제안하는 Novel VSS-FxGAL(NVSS-FxFAL) 알고리즘을 보인다. 4장에서 실험을 통해 제안 알고리즘의 성능을 평가하고 마지막으로 5장에서 결론을 맺는다.
II. 가변 수렴 상수 FxGAL 알고리즘
|
Fig. 1. Block diagram of filtered-x gradient adaptive lattice. |
|
Fig. 2. Block diagram of 1st order |

 stage adaptive filter.
stage adaptive filter.2.1 FxGAL 알고리즘
Fig. 1은 능동 소음 제어를 위한  차의 FxGAL 알고리즘 블록선도를 보이고 있다.[10,11] 이때, 추정된 2차 경로로 컨벌루션된 참조 신호
차의 FxGAL 알고리즘 블록선도를 보이고 있다.[10,11] 이때, 추정된 2차 경로로 컨벌루션된 참조 신호  에 대한 전방 선형 예측 오차(forward prediction error)와 후방 선형 예측 오차(backward prediction error)는 다음과 같다.[7]
에 대한 전방 선형 예측 오차(forward prediction error)와 후방 선형 예측 오차(backward prediction error)는 다음과 같다.[7]
 , (1)
, (1)
 . (2)
. (2)
 과
과  은 각각 시간 인덱스와 단계 인덱스이며,
은 각각 시간 인덱스와 단계 인덱스이며,  와
와  은 각각 전방과 후방 선형 예측 오차이고, 각 단계에 대한 후방 선형 예측 오차들은 서로 직교(orthogonal) 하다.[7]
은 각각 전방과 후방 선형 예측 오차이고, 각 단계에 대한 후방 선형 예측 오차들은 서로 직교(orthogonal) 하다.[7]
 . (3)
. (3)
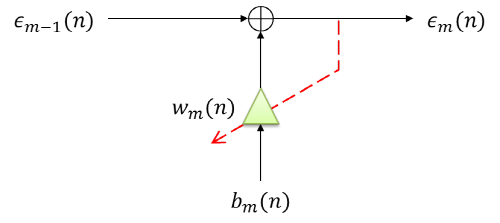
능동 소음 제어를 위한 FxGAL 알고리즘에서 반사계수  는 다음과 같은 갱신 식을 갖는다.[10]
는 다음과 같은 갱신 식을 갖는다.[10]
 , (4)
, (4)
 . (5)
. (5)
 는 반사 계수를 갱신하기 위한 수렴 상수이고,
는 반사 계수를 갱신하기 위한 수렴 상수이고,  은 전방 선형 예측 오차와 지연 후방 선형 예측 오차의 파워이며 다음과 같다.
은 전방 선형 예측 오차와 지연 후방 선형 예측 오차의 파워이며 다음과 같다.
 , (6)
, (6)
 . (7)
. (7)
 는 스무딩 인자이다. FxGAL 알고리즘의
는 스무딩 인자이다. FxGAL 알고리즘의  단계에 대한 적응 필터 계수
단계에 대한 적응 필터 계수  은
은  단계에서 추정된 로컬 오차의 제곱이 최소화 하도록 갱신되며 다음과 같다.
단계에서 추정된 로컬 오차의 제곱이 최소화 하도록 갱신되며 다음과 같다.
 . (8)
. (8)
 는 적응 필터를 위한 수렴 상수 이고,
는 적응 필터를 위한 수렴 상수 이고,  는 후방 예측 오차의 파워로 Eq.(6)과 같이 1차 IIR 필터로부터 얻을 수 있다. 이때,
는 후방 예측 오차의 파워로 Eq.(6)과 같이 1차 IIR 필터로부터 얻을 수 있다. 이때,  단계의 로컬 오차
단계의 로컬 오차  는 다음과 같다.
는 다음과 같다.
 . (9)
. (9)
 은 2차 경로이며,
은 2차 경로이며,  는 참조 신호
는 참조 신호  에 대한 격자 필터의
에 대한 격자 필터의  단계 후방 예측 오차이고,
단계 후방 예측 오차이고,  은 주 소음 신호
은 주 소음 신호  과 같다. 이때,
과 같다. 이때,  단계의 로컬 오차를 얻기 위해서는 주 소음 신호
단계의 로컬 오차를 얻기 위해서는 주 소음 신호  을 측정해야 한다. 하지만 실제 능동 소음 제어 시스템에서는 주 소음 신호
을 측정해야 한다. 하지만 실제 능동 소음 제어 시스템에서는 주 소음 신호  의 측정이 불가능하며, 에러 센서로부터 잔여 소음 신호
의 측정이 불가능하며, 에러 센서로부터 잔여 소음 신호  만 측정할 수 있다. 이때 격자 필터의
만 측정할 수 있다. 이때 격자 필터의  이
이  과 같다는 사실을 바탕으로 Eq.(9)를 다음과 같이 다시 정리하여
과 같다는 사실을 바탕으로 Eq.(9)를 다음과 같이 다시 정리하여  단계에 대한 오차 신호를 추정할 수 있다.[10]
단계에 대한 오차 신호를 추정할 수 있다.[10]
 .
.Eq.(10)을 살펴보면  단계에 출력 신호를 보상함으로써 로컬 오차 신호를 재 생성할 수 있을 뿐만 아니라 주 소음 신호
단계에 출력 신호를 보상함으로써 로컬 오차 신호를 재 생성할 수 있을 뿐만 아니라 주 소음 신호  또한 추정할 수 있다.
또한 추정할 수 있다.
2.2 가변 수렴 상수 FxGAL 알고리즘
FxGAL 알고리즘은 입력 신호의 통계적 특성에 관계없이 TDL 구조의 알고리즘보다 우수한 성능을 보이는 반면, AP 알고리즘에 비해 초기에 느린 수렴 속도를 갖는 단점이 있다. 따라서 초기에 빠른 수렴 속도를 갖고 낮은 정상 상태를 갖도록 수렴 상수를 조절 하는 방법인 가변 수렴 상수 기술을 GAL 알고리즘에 적용하는 방법이 제시되었다.[11]
 로 가정 하면, Eq.(8)은 다음과 같이 벡터 형식으로 다시 정리 된다.
로 가정 하면, Eq.(8)은 다음과 같이 벡터 형식으로 다시 정리 된다.
 . (11)
. (11)
후방 선형 예측 오차의 파워 매트릭스 
 로 정의 되고,
로 정의 되고,  은 시간
은 시간  에서의 가변 수렴 상수이다.이때, 귀납적(a posteriori) 오차는 다음 식으로 정의 된다.
에서의 가변 수렴 상수이다.이때, 귀납적(a posteriori) 오차는 다음 식으로 정의 된다.
 . (12)
. (12)
 은
은  이라는 사실을 바탕으로 Eq.(12)을 Eq.(11)에 적용하여 다시 정리 하면 귀납적 오차는 다음과 같이 얻을 수 있다.
이라는 사실을 바탕으로 Eq.(12)을 Eq.(11)에 적용하여 다시 정리 하면 귀납적 오차는 다음과 같이 얻을 수 있다.
 . (13)
. (13)
시스템 잡음  과 참조 신호
과 참조 신호  이 상호간에 상관성이 없다면, 이상적인 능동 소음 제어 시스템은 소음
이 상호간에 상관성이 없다면, 이상적인 능동 소음 제어 시스템은 소음  중에서
중에서  만을 남기게 된다. 그러므로 이상적인 가변 수렴 상수 인자
만을 남기게 된다. 그러므로 이상적인 가변 수렴 상수 인자  은 다음 조건을 만족해야 한다.[11]
은 다음 조건을 만족해야 한다.[11]
 , (14)
, (14)
 은 귀납적 오차의 파워 이고,
은 귀납적 오차의 파워 이고, 
 은 시스템 잡음의 파워 이다. Eq.(13)의 양변을 제곱한 뒤에 통계 기댓값을 취한 뒤에 전개 하면 다음 식을 얻는다.
은 시스템 잡음의 파워 이다. Eq.(13)의 양변을 제곱한 뒤에 통계 기댓값을 취한 뒤에 전개 하면 다음 식을 얻는다.
 . (15)
. (15)
 는
는  번째 단계의 로컬 오차의 파워이다. 이때, 가변 수렴 상수를 얻기 위해서는 입력 신호로부터 직접적으로 추정이 불가능한
번째 단계의 로컬 오차의 파워이다. 이때, 가변 수렴 상수를 얻기 위해서는 입력 신호로부터 직접적으로 추정이 불가능한  이 필요하므로 간접적인 추정이 요구된다. 따라서 적응 필터가 충분히 정상 상태에 도달 했다는 가정과 2차 경로가 정확히 추정되었다고 가정 한다면,
이 필요하므로 간접적인 추정이 요구된다. 따라서 적응 필터가 충분히 정상 상태에 도달 했다는 가정과 2차 경로가 정확히 추정되었다고 가정 한다면,  단계에서의 로컬 오차
단계에서의 로컬 오차  은 시스템 잡음
은 시스템 잡음  과
과  번째 단계에서의 출력 신호
번째 단계에서의 출력 신호  의 합으로 표현이 가능하므로 다음과 같이 간접적으로
의 합으로 표현이 가능하므로 다음과 같이 간접적으로  을 추정할 수 있다.
을 추정할 수 있다.
 . (16)
. (16)
Eqs.(17)과 (18)을 이용하여 가변 수렴 상수를 다시 정리하면 다음과 같다.
 . (17)
. (17)
 ,
,  그리고
그리고  은 모두 Eq.(6)과 같이 1차의 IIR 필터를 이용하여 추정하였다. 적응 필터가 충분히 수렴하였다는 가정 하에는
은 모두 Eq.(6)과 같이 1차의 IIR 필터를 이용하여 추정하였다. 적응 필터가 충분히 수렴하였다는 가정 하에는 
 의 조건을 만족하지만 파워 추정 과정에서 가끔씩 위의 조건을 만족하지 못하는 경우가 발생하기 때문에 Eq.(17)에 절대 값을 적용하여 가변 수렴 상수는
의 조건을 만족하지만 파워 추정 과정에서 가끔씩 위의 조건을 만족하지 못하는 경우가 발생하기 때문에 Eq.(17)에 절대 값을 적용하여 가변 수렴 상수는  을 만족하도록 하였다.
을 만족하도록 하였다.
III. 제안 가변 수렴 상수 FxGAL 알고리즘
VSS-FxGAL 알고리즘에서 가변 수렴 상수는 Eq.(17)와 같이  단계의 로컬 오차와 필터 출력 신호만을 이용하여 추정한다. 추정된 가변 수렴 상수는 격자 필터의 각 단계에 동일하게 적용되기 때문에 각 단계에 적합한 수렴 상수를 결정할 수 없다. 따라서 입력 신호의 특성 및 격자 차수에 대해서 일관성 있는 수렴 성능을 갖지 못하며 또한 수렴 성능이 저하되는 문제가 발생한다. 이러한 문제를 해결하기 위해 본 논문에서는 각 단계에 적절한 수렴 상수를 적용할 수 있도록 로컬 가변 수렴 상수 기법을 이용하여 수렴 성능을 향상 시킨다.
단계의 로컬 오차와 필터 출력 신호만을 이용하여 추정한다. 추정된 가변 수렴 상수는 격자 필터의 각 단계에 동일하게 적용되기 때문에 각 단계에 적합한 수렴 상수를 결정할 수 없다. 따라서 입력 신호의 특성 및 격자 차수에 대해서 일관성 있는 수렴 성능을 갖지 못하며 또한 수렴 성능이 저하되는 문제가 발생한다. 이러한 문제를 해결하기 위해 본 논문에서는 각 단계에 적절한 수렴 상수를 적용할 수 있도록 로컬 가변 수렴 상수 기법을 이용하여 수렴 성능을 향상 시킨다.
FxGAL 알고리즘의 후방 예측 오차는 서로 직교 특성을 가지므로 각 단계는 단일 차수를 갖는 적응 필터로 표현할 수 있다. 이때,  단계에서의 오차신호는
단계에서의 오차신호는  단계에서의 주 입력 신호가 되어 참조 신호
단계에서의 주 입력 신호가 되어 참조 신호  과 적응 필터 계수
과 적응 필터 계수  을 이용하여
을 이용하여  단계의 오차 신호
단계의 오차 신호  를 얻는다. 이때 귀납적 오차를 다시 정의 하면 다음과 같다.
를 얻는다. 이때 귀납적 오차를 다시 정의 하면 다음과 같다.
 . (18)
. (18)
위의 식에 Eq.(8)을 적용하여 다시 정리하면 다음과 같다.
 . (19)
. (19)
Eq.(8)과 (13)을 이용하여 Eq.(19)를 다시 정리하면 다음과 같다.
 . (20)
. (20)
Eq.(20)의 양변을 제곱 한 뒤 통계 기댓값을 취하면 다음과 같다.
 . (21)
. (21)
 ,
,  이다. 이때 수렴 상수
이다. 이때 수렴 상수  에 대해서 다시 정리하면 다음과 같다.
에 대해서 다시 정리하면 다음과 같다.
 . (22)
. (22)
적응 필터가 충분히 수렴 하면  단계에서 얻어지는 귀납적 오차는 시스템 잡음
단계에서 얻어지는 귀납적 오차는 시스템 잡음  와 같아지므로
와 같아지므로  조건을 만족하는 가변 수렴 상수
조건을 만족하는 가변 수렴 상수  을 추정해야한다. 하지만 실제 실험 환경에서는 입력 신호로부터
을 추정해야한다. 하지만 실제 실험 환경에서는 입력 신호로부터  을 정확히 얻을 수 없다. 이때
을 정확히 얻을 수 없다. 이때  단계에서의 주 입력 신호
단계에서의 주 입력 신호  은 다음과 같이 표현할 수 있다.
은 다음과 같이 표현할 수 있다.
 . (23)
. (23)
 과
과  은 각각
은 각각  단계에서의 최적 계수와 시스템 잡음이다. 이때,
단계에서의 최적 계수와 시스템 잡음이다. 이때,  과
과  이 상호간에 상관성이 없다면,
이 상호간에 상관성이 없다면,  단계에서의 시스템 잡음은 다음과 같이 추정할 수 있다.
단계에서의 시스템 잡음은 다음과 같이 추정할 수 있다.
 . (24)
. (24)
Eq.(24)를 Eq.(22)에 적용하여 로컬 가변 수렴 상수를 다음과 같이 얻을 수 있다.
 . (25)
. (25)
이때, 로컬 가변 수렴 상수가 양수 값을 갖도록 절대 값을 이용하였으며, VSS-FxGAL의 가변 수렴 상수와 같이 로컬 가변 수렴 상수의 범위는 
 을 갖도록 하였다.
을 갖도록 하였다.
IV. 실험 및 결과
실험을 위한 소음 신호는 기본 주파수의 하모닉 성분을 갖도록 다음과 같이 모델링하였다.
 . (26)
. (26)
 는 하모닉의 개수이며,
는 하모닉의 개수이며,  는 기본 주파수이고,
는 기본 주파수이고,  와
와  는 각각
는 각각  th 하모닉의 크기와 위상이다. 그리고
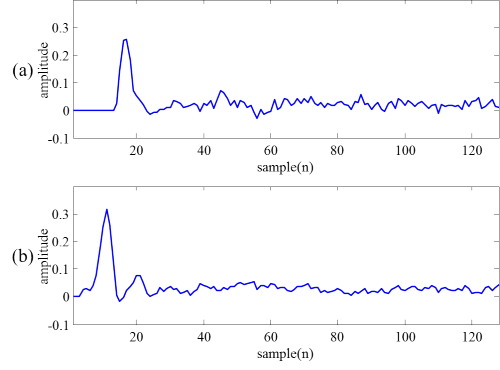
th 하모닉의 크기와 위상이다. 그리고  은 2차의 AR 계수로 모델링된 배경 잡음이다. Fig. 3은 실험에 사용된 음향 경로와 2차 경로를 보이고 있다.
은 2차의 AR 계수로 모델링된 배경 잡음이다. Fig. 3은 실험에 사용된 음향 경로와 2차 경로를 보이고 있다.
제안 알고리즘의 성능을 평가를 위해 FxGAL 알고리즘과 VSS-FxGAL 알고리즘을 비교하였으며, 실험을 위한 주 소음 신호  은
은  로 하여 기본 주파수는 240, 200 그리고 275 Hz로 2 s 간격으로 변경하였으며, 위상은 랜덤하게 발생하였다. 배경 잡음 20 dB SNR을 갖도록 생성하였고, 필터 차수
로 하여 기본 주파수는 240, 200 그리고 275 Hz로 2 s 간격으로 변경하였으며, 위상은 랜덤하게 발생하였다. 배경 잡음 20 dB SNR을 갖도록 생성하였고, 필터 차수  은 8로 하여 실험을 실시하였다.
은 8로 하여 실험을 실시하였다.
|
Fig. 3. Impulse response of (a) the primary path, and (b) the secondary path. |
|
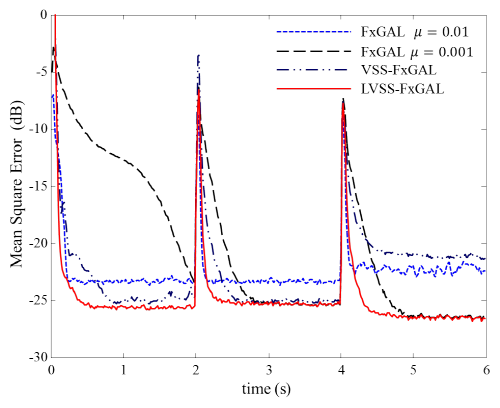
Fig. 4. MSE of the FxGAL algorithms |
 ,
,  VSS-FxGAL and the proposed algorithm.
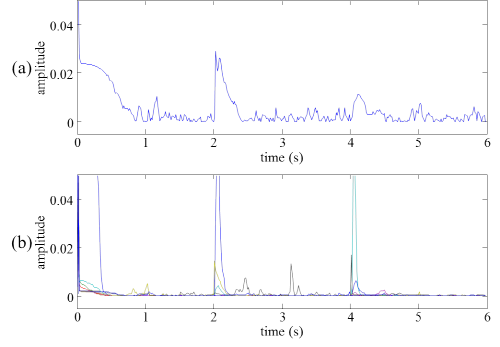
VSS-FxGAL and the proposed algorithm. 각 알고리즘에 대한 MSE(Mean Square Error) 결과을 보이고 있는 Fig. 4로부터 제안 알고리즘은 고정 수렴 상수를 가지는 FxGAL 알고리즘과 비교함으로써 빠른 수렴 속도와 낮은 정상 상태를 가지는 것을 관찰할 수 있다. 특히 단일 가변 수렴 상수인 VSS-FxGAL 알고리즘은 신호의 특성이 변하는 2 s와 4 s에서 서로 상이한 수렴 성능을 가지는 것을 관찰할 수 있다. 하지만 제안 알고리즘은 로컬 가변 수렴 상수를 사용하여 신호의 특성 변화에 관계없이 안정적으로 일관성 있는 수렴 성능을 보인다. Fig. 5는 VSS-FxGAL 알고리즘과 제안 알고리즘의 가변 수렴 상수를 보이고 있다. 이때, VSS-FxGAL 알고리즘에 대한 단일 수렴 상수에 대해서 보이며, 제안 알고리즘은 각 단계에 적용되는 수렴 상수를 겹쳐서 보이고 있다.
Fig. 5(a)로부터 VSS-FxGAL 알고리즘의 가변 수렴 상수는 신호의 특성이 변화하는 전이 구간에서 빠르게 수렴 상수를 조절하지 못하고 정상 상태에서의 수렴 상수 변화가 크게 나타나는 것으로부터 초기 수렴 속도 및 정상 상태 레벨(steady-state level)에 어려움이 있음을 간접적으로 확인할 수 있다.반면, Fig. 5(b)로부터 제안 알고리즘은 로컬 가변 수렴 상수를 전이 구간에서는 큰 수렴 상수로 결정되며 정상 상태에서는 낮은 수렴 상수를 가지도록 효과적으로 조절함으로써 빠르고 안정적인 수렴 성능 보장한다.