

I. 서 론
선박 운행 중 발생하는 수중방사소음이 해양 생물들에 영향을 준다는 연구들이 발표됨에 따라,[1] 캐나다 등 다양한 국가 및 기관에서 수중 방사 소음 관련 연구를 진행하고 있다.[2,3] 이러한 흐름에 발맞추어 선급들은 상선의 수중방사소음에 대한 가이드라인을 제시하고 있으며,[4,5] 국제 해사기구(International Maritime Organization, IMO) 또한 수중 방사 소음 규제와 관련된 논의를 진행하고 있다.[6]
함정의 경우 선체에서 유기되는 수중방사소음은 음향 스텔스 성능에 큰 영향을 주는 요인으로 함정의 생존 및 작전의 성공과 직결된 문제로써, 함정의 수중방사소음 저감 관련 연구는 오랫동안 진행됐으며, 현재에도 다양한 연구들이 진행되고 있다.[7,8] 일반적으로 함정에서 유기되는 수중방사소음의 소음원은 선체 주변의 유동소음, 선체 내부의 기계 소음, 선체 진동 소음, 추진기 소음 등이 있는 것으로 알려져 있으며, 추진기에서 공동이 발생할 경우 추진기에서 발생하는 공동에 의한 수중방사 소음이 지배적인 영향을 준다고 알려져 있다.[7,8,9] 이에 함정 추진기에서 발생하는 공동을 탐지하고 공동 소음을 저감하기 위한 다양한 연구 또한 진행되고 있다.[10,11,12,13]
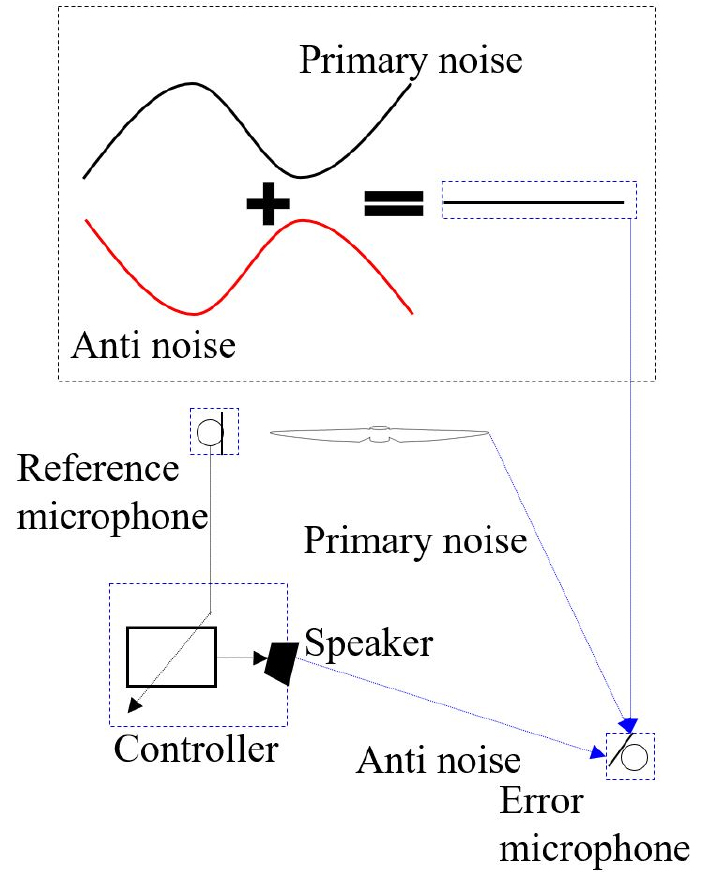
수중방사소음 저감 관련 연구들에 대한 관심이 증가됨에 따라 현재 다양한 제품들에 사용되고 있는 능동소음제어(Active Noise Control, ANC)을 이용한 수중방사소음 저감 방안 또한 논의되고 있다. 능동소음제어는 제어기와 센서, 액츄에이터를 사용해 목표 지점에서의 소음과 반대 위상의 파동을 중첩시켜 소음을 저감하는 기법으로, 일반적인 능동소음제어 시스템은 Fig. 1과 같은 구조를 갖는다. 능동소음제어 시스템은 소음원 근방에서 측정한 기준 신호를 기반으로 제어기에서 반대 위상의 상쇄 소음을 계산, 스피커를 통해 방출한다. 방출된 상쇄소음은 목표 위치에서 목표소음과 상쇄 간섭을 일으켜 소음을 저감하게 된다.[14,15,16]
능동소음제어를 통한 소음 저감의 경우 시스템 구성에 따라 소음 저감 성능이 크게 변화하는 것으로 알려져 있으며,[14] 능동소음제어 시스템을 통해 효과적인 소음 저감효과를 얻기 위해서는 최적화된 시스템 설계가 필요하다.
능동소음제어 시스템 설계를 위한 연구들은 실험적인 방법부터 시뮬레이션을 이용한 방법까지 다양하게 진행됐으며, 능동소음제어 시뮬레이션 기법들의 경우, 파형영역(Wavedomain) 상에서 음장을 예측하는 방법과 전산공력음향학(Computational aeroacoustics, CAA)을 통한 음장 예측 방법 등이 제안된 바 있다.[17,18,19] 시뮬레이션 기법들 중 Kim et al.이 제안한 전산공력음향학을 이용한 능동소음제어 시뮬레이션은 임의의 소음원에 대한 에러마이크 소음 저감량 및 음장 변화 예측이 가능할 뿐 아니라,[19,20] 시뮬레이션을 통해 능동소음제어에 따른 멀티로터 프로펠러 소음 저감량 및 음장 변화를 예측하고 검증한 바 있다.[21]
이에 본 연구에서는 Kim et al.이 개발한 능동소음제어 시뮬레이션을 통해 함정 프로펠러의 수중방사소음에 대해 능동소음제어 시뮬레이션을 제작하였다. 본 연구에서는 시뮬레이션을 통해 함정 프로펠러에 대해 능동소음제어 시스템 적용을 위한 조건을 분석하고, 능동소음제어 시스템 작동에 따른 에러마이크 소음 저감량 및 음장 변화 예측을 진행하여 능동소음제어 시스템 구축을 위한 기초 연구를 수행하였다.
II. 시뮬레이션 방법
본 연구에서는 선행 연구에서 개발된 능동소음제어 시뮬레이션을 기반으로 진행되었다.[19,20,21] 능동소음제어 시뮬레이션은 각기 다른 시간 간격을 보이는 음장 예측 기법과 시뮬레이션 내 가상의 제어기 간의 시간 변화를 동기화시켜, 음장 계산 중 음장의 시간이 가상제어기의 샘플링 주기와 일치하는 경우 시뮬레이션 내의 가상제어기가 작동, 상쇄소음을 방출하는 방식으로 진행되었다.
본 시뮬레이션에서 음장 계산은 전산공력음향학 기법인 4차 DRP 기법(Dispersion-Relation-Preserving Scheme)을 사용하여 진행되었으며, 시뮬레이션은 3 m의 직경을 갖는 원통형 격자계에서 진행되었다. 가상제어기의 능동소음제어 알고리즘은 Filtered-X Lesat Mean Square(FxLMS) 알고리즘을 사용하였다. FxLMS 알고리즘은 간단한 구조를 갖는 광대역 소음 저감 알고리즘으로써, 에러마이크에서 측정된 음압의 평균 제곱 오차(Mean Square Error, MSE)를 최소화하는 Lesat Mean Square(LMS)알고리즘에 전달경로 보정이 추가된 알고리즘이다. FxLMS 알고리즘의 경우 알고리즘 내 루프의 계산시간이 적어 샘플링 속도 최대화가 가능하다. 능동소음제어시 샘플링 속도는 성능과 밀접한 관련이 있는 변수로써 능동소음제어를 통한 소음 저감을 위해서는 한 파장 내에서 적어도 2점 이상을 샘플링해야 하며, 충분한 소음 저감 성능을 얻기 위해서는 한 파장 내 4점 ~ 8점 이상의 샘플링이 필요한 것으로 알려져 있다.[19]
함정 프로펠러 소음에 대한 능동소음제어 시뮬레이션을 위해 본 연구에서는 제원이 공개되어 있는 KRISO Very Large Crude Carrier-II(KVLCC-II) 선형을 기반으로 능동소음제어 시스템을 배치하였다. 본 연구에서는 프로펠러 소음에 대한 능동소음제어 가능성 파악 및 능동소음제어에 따른 음장 변화에 초점을 맞추어 시뮬레이션을 진행하였으며, 선체의 차단 효과는 고려하지 않았다.
능동소음제어 시스템은 Fig. 2(a)와 같이 선체 위치에 배치되는 것으로 가정하여 진행되었으며, 각각의 구성요소를 살펴보면 다음과 같다. 기준 마이크는 일반적으로 선체 기진력을 측정하는 위치이자 소스 레벨 환산 및 실선확장을 진행시 실선의 수중방사소음과 높은 상관관계를 가짐이 선행 연구를 통해 알려진 바 있는 프로펠러 직상부에 배치하였으며,[2] 에러마이크는 소음 전파를 고려해 선미에 배치하였다. 제어 스피커의 경우 제어에 따른 시간 지연을 고려하여 에러마이크에 더 가까운 프로펠러 후방에 배치하였다.
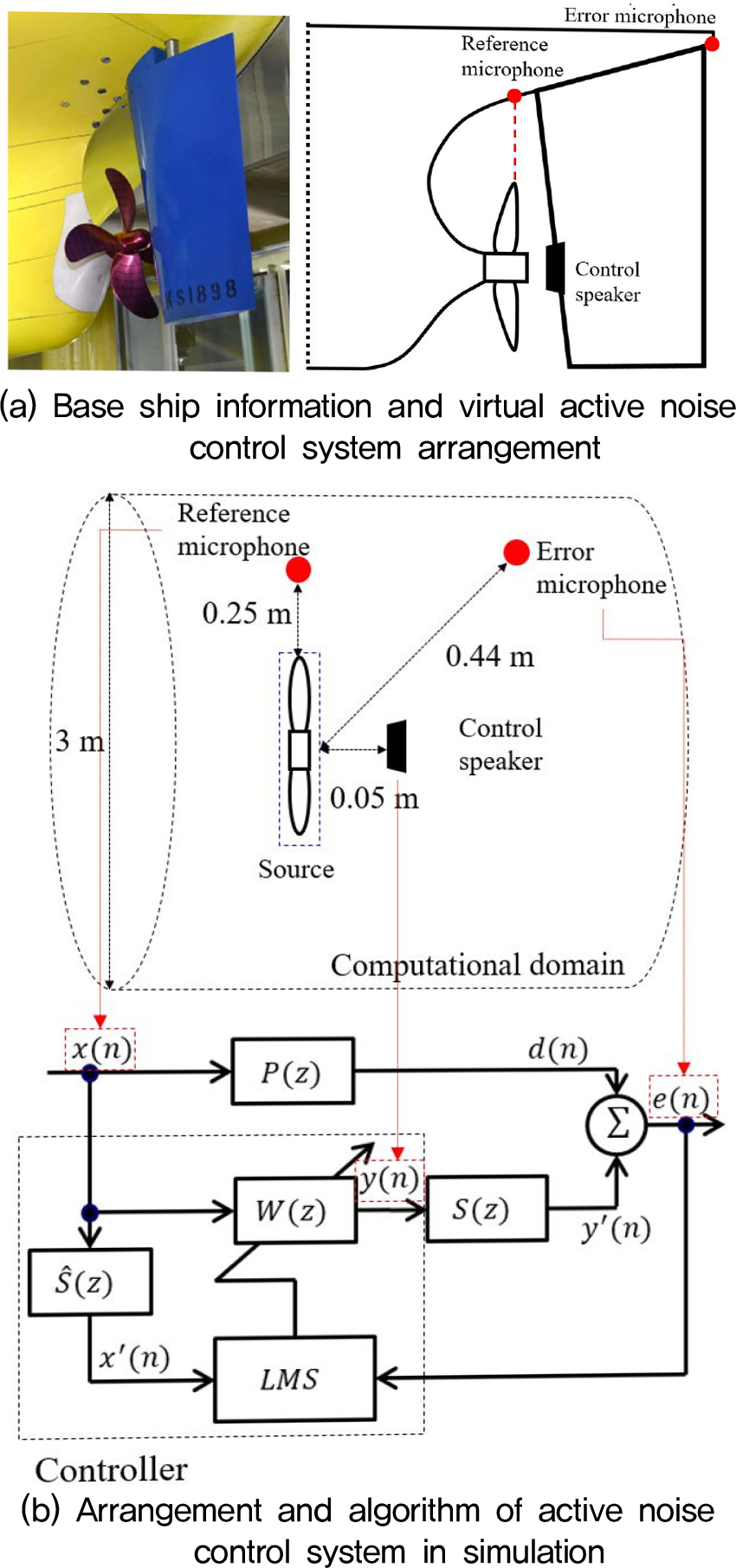
KVLCC-II 선형을 기반으로 제작된 능동소음제어 시뮬레이션은 Fig. 2(b)와 같다. 능동소음제어 시뮬레이션은 방사 경계 조건의 원통형 격자에서 진행되었으며, 원통형 격자의 지름은 3 m 원통 길이는 2 m로 진행되었다. 본 연구에서 사용된 격자 크기는 선행 연구를 기반으로 결정된 값을 사용하였다.[19,20,21] 시뮬레이션 상 소음원과 기준 마이크는 0.25 m 떨어진 위치에 배치되었으며, 에러마이크는 소음원으로부터 0.44 m, 제어 스피커는 0.05 m에 배치되었다. 본 시뮬레이션 내 기준 마이크에서 측정된 값은 FxLMS 알고리즘 내에 입력되어 제어 신호를 계산하는 기준값으로 사용되며 제어스피커에서는 계산된 반대파를 방출해줌으로써, 에러마이크 위치에서의 소음을 저감한다.
프로펠러 소음원은 선행연구와 동일하게 프로펠러의 BPF 소음 성분 모사가 가능한 회전하는 코드 방향 이중극 소음원으로 모델링하였다.[21] 본 연구에서는 프로펠러의 날개수와 동일하게 4개의 이중극 소음원을 90° 간격으로 배치하였으며, 각각의 소음원은 날개의 코드 길이에 맞추어 앞뒤로 양극과 음극을 배치하였다. 또한, 이중극 소음원들은 모형시험과 동일하게 35 Hz의 회전속도로 회전하도록 모델링하였다.
III. 실험 및 시뮬레이션 결과
3.1 소음원 모델 제작
본 연구에서는 능동 소음 제어에 따른 소음 저감량 예측을 위해 먼저 소음원 모델링을 진행하였다. 본 연구에서는 회전하는 이중극 소음원의 강도를 정하기 위해 기준 마이크의 1st BPF Sound Pressure Level(SPL)의 Power Spectral Density(PSD)를 기준으로 소음원 강도 모델링을 진행하였으며, 시뮬레이션 내 기준마이크에서 측정된 1st BPF SPL의 크기가 실험 결과와 동일한 값을 갖는 상황에 대해 에러마이크에서 측정된 소음에 대한 능동소음제어를 진행하였다.
모델링된 소음원은 Fig. 3(a)와 같이 1st BPF SPL이 공동 터널(cavitation tunnel) 실험 결과와 1 dB/Hz 이내로 모델링되었으며, 이때 2차 BPF 고조파성분(harmonics)은 약 9 dB의 오차를 가지며 3rd BPF 고조파성분은 1 dB/Hz 이내의 오차를 갖는 것으로 나타났다. 그러나 고차 BPF 고조파 성분을 과대 예측함으로써, 고주파 성분에 대해서는 실험 결과보다 과대 예측하는 경향을 보였다. 이는 시뮬레이션 내 소음원이 회전하는 이중극으로 모델링됨에 따라 실험에서 발생하는 공동 현상에 의한 BPF 성분을 예측하지 못해 블레이드 표면 압력 성분을 과대 예측했기 때문으로 보인다.
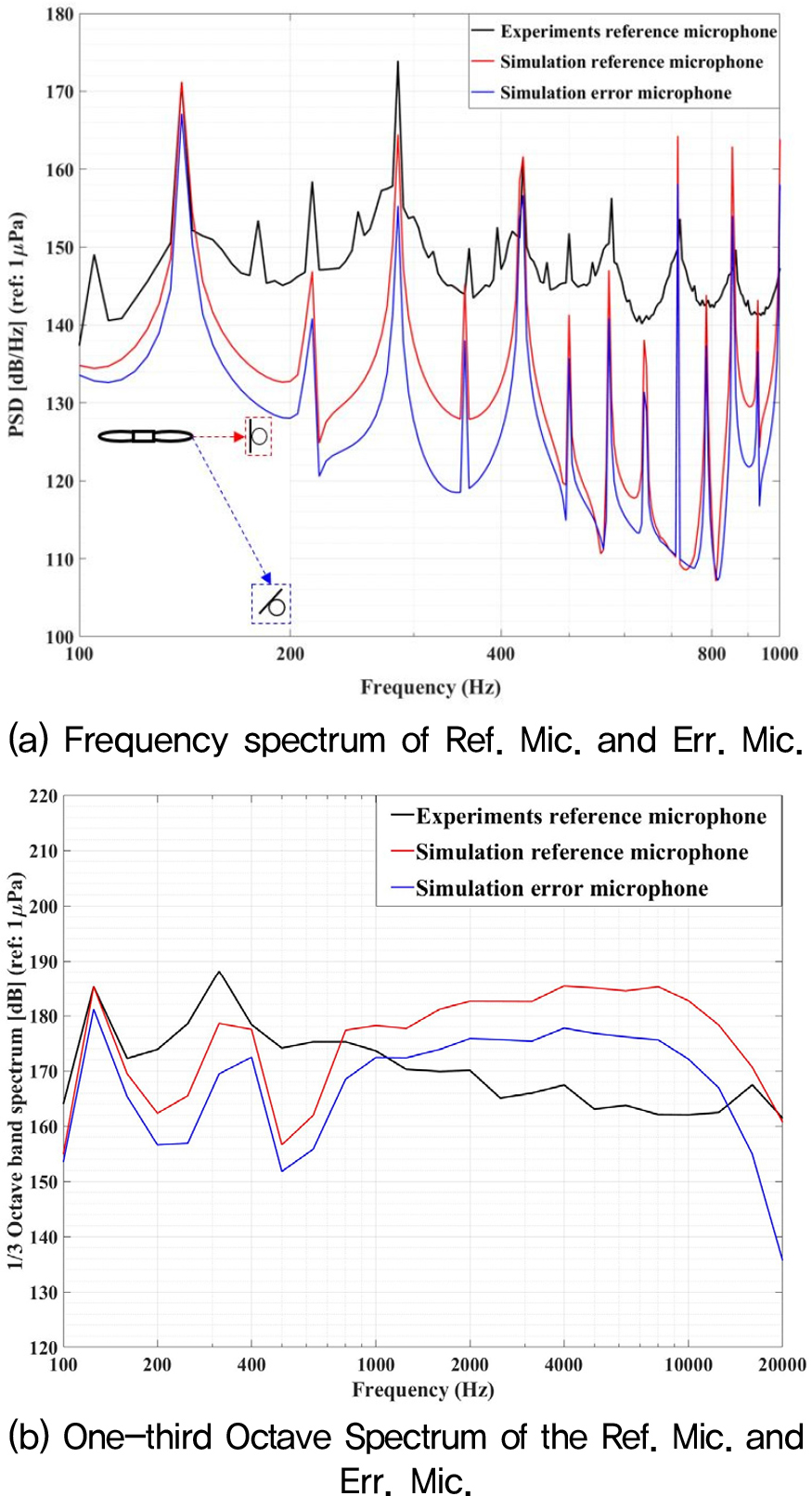
기준 마이크를 기준으로 모델링된 소음원에 의한 에러 마이크의 소음도 결과를 살펴보면 1st BPF 성분의 경우 약 167 dB/Hz으로 기준 마이크와 약 4 dB/Hz의 차이를 보였다. 이는 에러 마이크와 소음원간의 거리가 기준 마이크와 소음원 간의 거리보다 약 2배 이상 길었으며, 소음원의 근거리 소음장 내에 위치하였기 때문으로 보인다. 근거리장에 위치함에 따라 거리에 따른 감쇠 효과가 저감되는 현상은 선행 연구를 통해서도 예측되었으며, 실험을 통해 예측 성능이 검증 된 바 있다.[21] 이에 반해 고주파 소음 성분들은 기준 마이크와 에러 마이크 간에 약 7 dB의 차이를 갖는 것으로 나타났다.
이에 본 연구에서는 소음원 모델링 및 에러마이크의 소음도를 충분히 신뢰할 수 있다고 판단하였으며, 본 소음원을 통해 능동소음제어 시뮬레이션을 진행하였다.
3.2 능동소음제어 저감 성능 분석
일반적인 공기중 소음에 대한 능동소음제어 시스템의 경우 제어하고자 하는 주파수의 4배 이상의 샘플링 속도를 갖는 제어기를 사용하면 능동 소음 제어를 통한 소음 저감이 가능하다고 알려져 있다.[14,19] 본 연구의 목표 선형인 KVLCC-II 선형의 1st BPF 주파수는 140 Hz로 공기 중 소음에 대해서는 1,000 Hz 이상의 샘플링 속도를 갖는 제어기를 사용할 경우 1st BPF 소음 성분 저감이 가능하다.
그러나 본 연구에서 진행된 시뮬레이션 결과에 따르면 Fig. 4와 같이 4 kHz의 샘플링 속도를 갖는 가상제어기에 따른 1st BPF 소음 저감량은 약 2 dB, 8 kHz의 샘플링 속도를 갖는 가상제어기는 1st BPF 소음 저감량이 약 3 dB를 갖는 것으로 나타났다. 이에 반해, 40 kHz의 샘플링 속도를 갖는 가상제어기의 경우 약 25 dB의 소음 저감량을 보임으로써, 일반적으로 알려진 능동소음제어에 따른 저감량을 보였다.
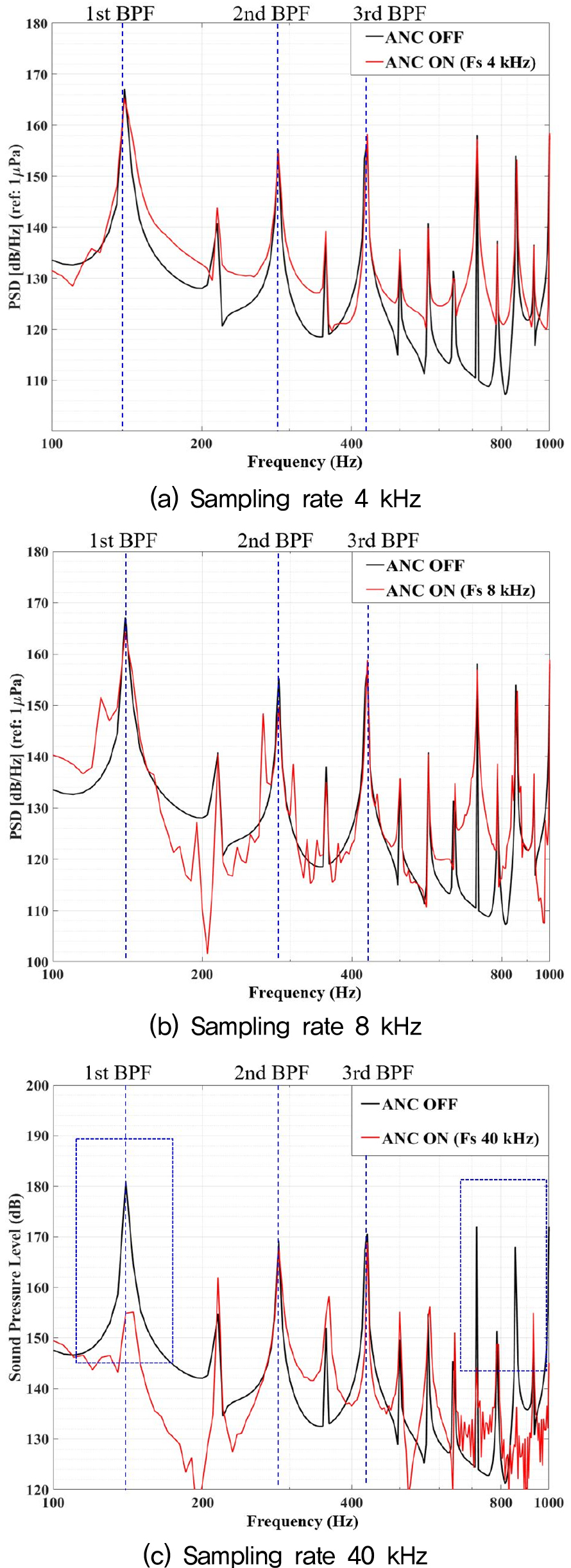
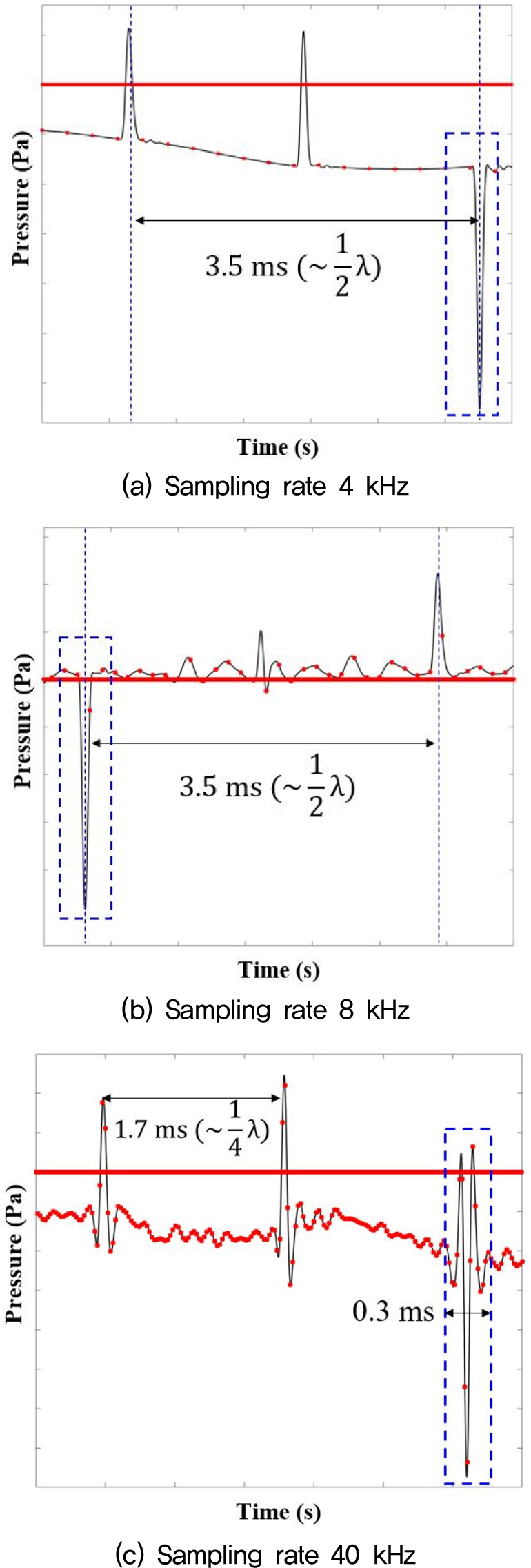
본 결과의 이유를 분석하기 위해 각각의 케이스의 음압 및 샘플링 점들을 살펴보면 Fig. 5와 같다. Fig. 5(a)는 4 kHz의 샘플링 속도를 갖는 케이스의 음압 및 샘플링된 점들을 나타난 그래프로 프로펠러 회전에 따른 음압이 충격 파형을 가짐에 따라 샘플 수가 충분히 충격 파형을 잡아내지 못해 소음 저감이 불가능한 것으로 나타났다. 이러한 결과는 8 kHz의 샘플링 속도를 갖는 Fig. 5(b)에도 나타났다. 8 kHz의 샘플링 속도에서의 셈플링 결과 또한 충격 파형을 일부 샘플링할 수 있었으나 충분한 샘플링이 불가능한 것으로 나타났다. 이에반해 Fig. 5(c)에 나타난 샘플링 속도 40 kHz 결과의 경우, 샘플링된 점들 간의 간격이 충분히 작아 프로펠러 회전에 따라 발생하는 충격 파형 내에 8점 이상의 샘플 포집이 가능했다. 이에, 40 kHz의 샘플링 속도를 갖는 가상제어기는 충분한 소음 저감이 가능한 것으로 보인다. 이때, 시뮬레이션 내 프로펠러에서 발생한 충격 파형은 약 0.1 ms ~ 0.3 ms의 지속시간을 가짐으로써, 공기중 소음과 차이를 보였다. 이는, 수중에서의 음속이 약 1500 m/s로 공기 중의 음속 약 340 m/s에 비해 약 4.4배 가량 높기 때문에 발생한 것으로 보인다.
본 시뮬레이션의 결과를 검증하기 위해 Fig. 6(a)와 같이 실험을 통해 측정된 프로펠러 소음과 시뮬레이션을 통해 예측된 파형을 비교하였다. 비교 결과 실험을 통해 계측된 프로펠러 소음 또한 지속시간이 약 0.3 ms이며, 피크 압력의 지속시간은 0.1 ms로 나타나 실험과 동일한 경향을 가졌다. 이는 본 시뮬레이션으로 예측된 결과가 실제 실험을 진행할 경우 나타날 수 있는 결과임을 보여줄 뿐 아니라 능동소음제어를 통해 수중 프로펠러 소음 저감이 어려움을 보여준다.
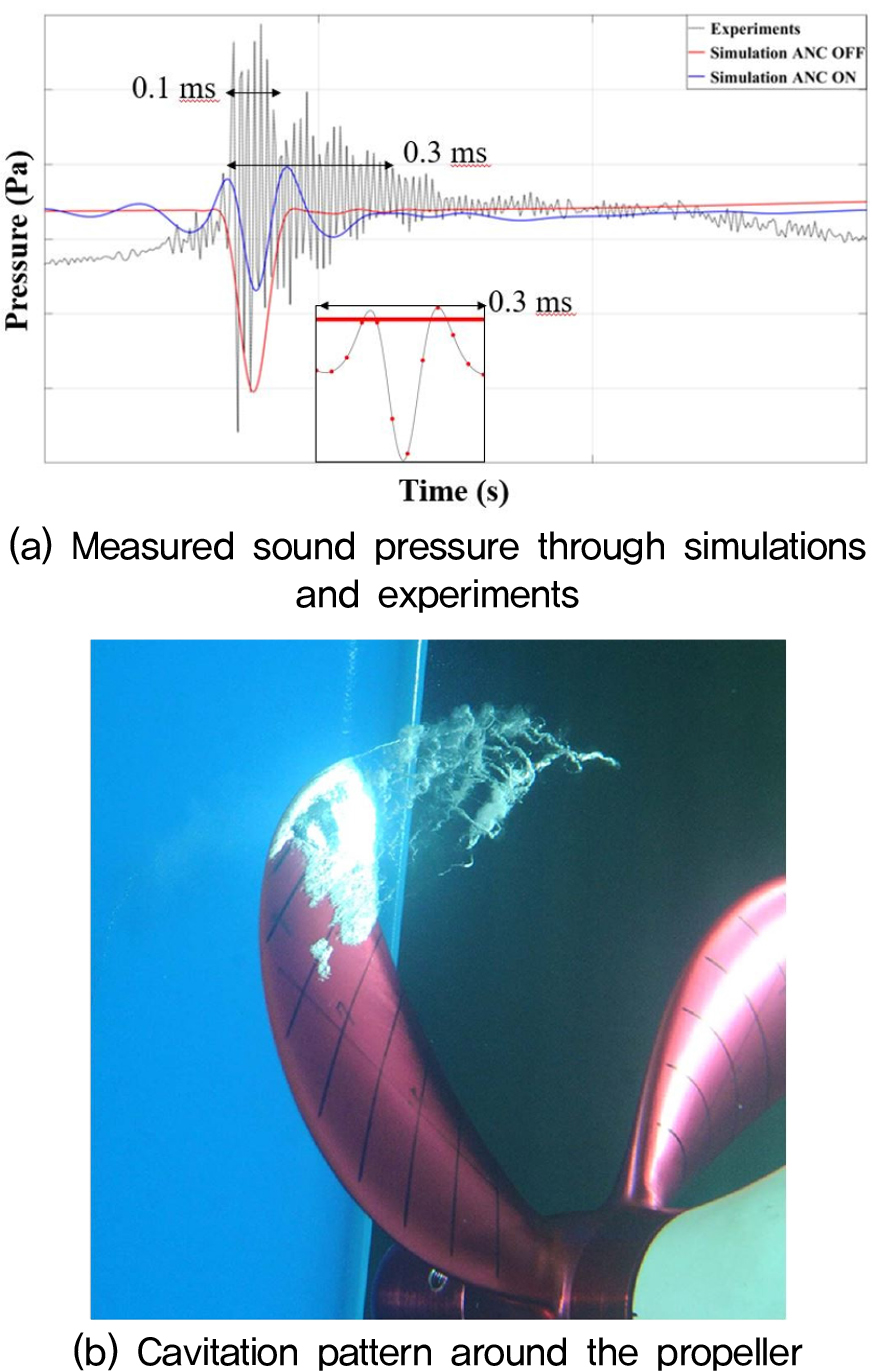
특히, 본 연구에서 진행된 실험과 같이 프로펠러 주변에 공동 현상이 발생하는 경우[Fig. 6(b) 참조] 프로펠러에서 발생하는 압력 파형은 시뮬레이션으로 예측된 단순 다중극 음파에 비해 복잡해지게 된다. 이러한 특성으로 인해 Fig. 6(a)의 실험 결과와 같이 공동이 발생한 프로펠러는 0.1 ms 내에 음압 변동이 5회 이상 나타나게 된다. 본 결과는 수중 프로펠러 소음에 대한 능동소음제어에 큰 걸림돌이 되는 결과로, FxLMS 알고리즘을 통해 공동이 발생한 프로펠러의 소음을 저감하기 위해서는 제어기의 샘플링 속도가 200 kHz 이상이 필요함을 보여준다.
각각의 주기 내에 능동소음제어 알고리즘 계산을 마쳐야 하는 능동소음제어 시스템 특성상 본 연구 결과는 현실적으로 FxLMS 알고리즘을 통한 수중 프로펠러 능동소음제어가 불가능함을 보여줄 뿐 아니라, 수중 프로펠러 소음에 대한 능동 소음 저감을 위해서는 프로펠러 소음에 대한 복조화(demodulation) 작업이 선행되어야 하며, 충격 파형에 대한 알고리즘이 필요함을 보여준다.
다음으로, 시뮬레이션을 통해 예측된 능동소음제어에 따른 소음 저감 효과를 1/3 옥타브 밴드로 살펴보면 Fig. 7과 같다.
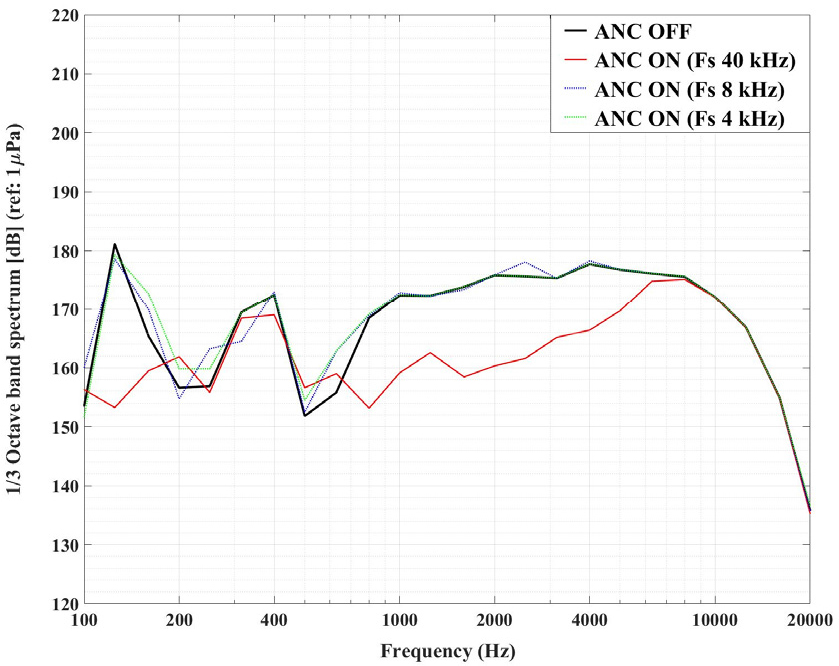
충격 파형에 대한 샘플링이 진행되지 못한 4 kHz와 8 kHz의 경우 소음 저감 효과가 없는 것으로 나타났으며, 40 kHz의 경우 선행 연구 결과에 나타난 바와 같이 샘플링 속도의 1/4인 10 kHz까지 소음 저감 효과가 나타났다. 본 결과는 제어기가 소음을 파악하는 경우 충분한 소음 저감 효과를 가질 수 있음을 보여준다.
3.3 음장 변화 분석
프로펠러 소음에 대한 Single Input Single Output (SISO) 능동소음제어에 따른 음장 변화 예측 결과를 분석한 결과는 Fig. 8과 같다.
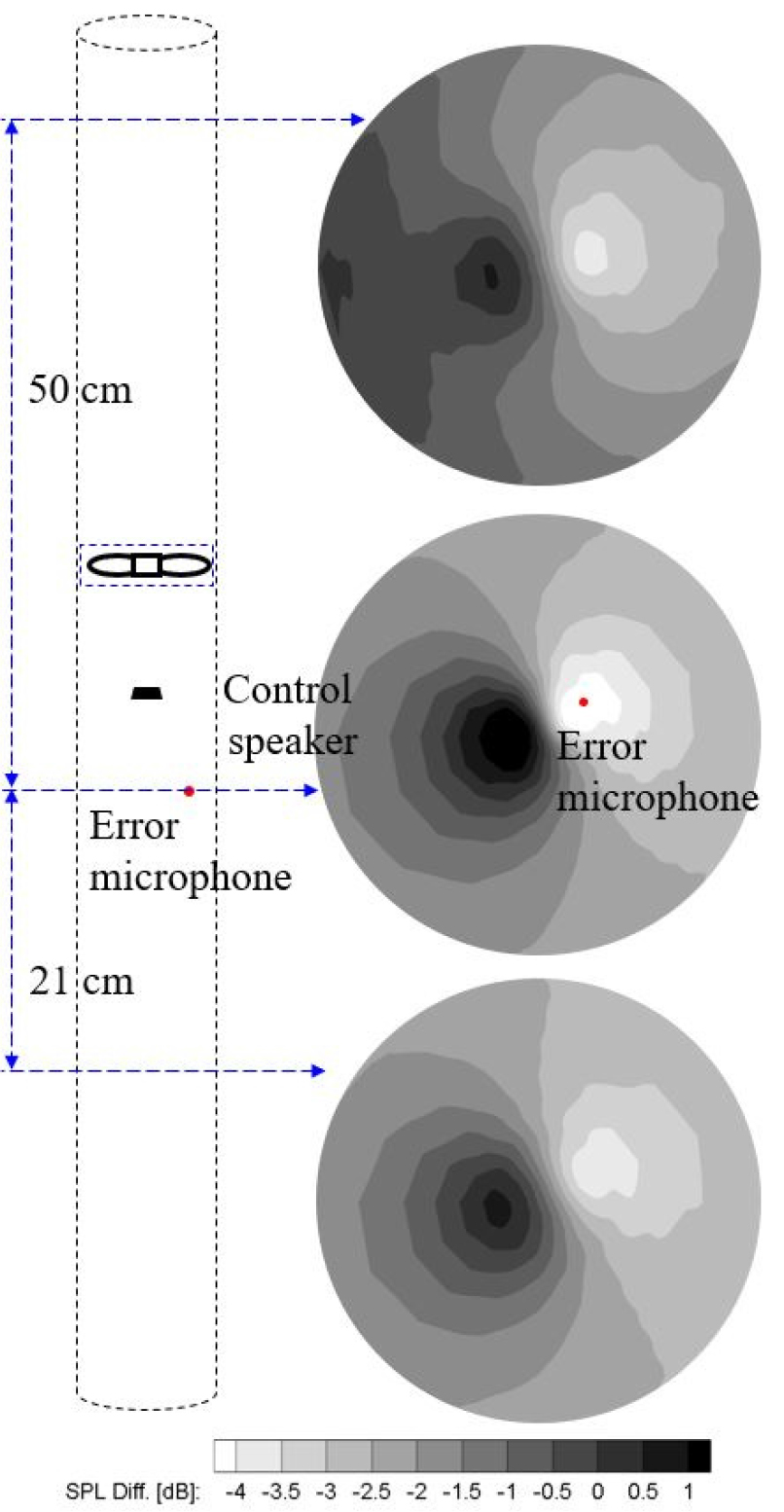
능동소음제어에 따른 각 위치별 음장변화를 살펴보면 전체적으로 에러마이크가 있는 방향의 소음은 저감되나 에러마이크와 반대되는 방향의 소음은 증가하는 것으로 나타났다. 이는 프로펠러에 의한 소음이 에러 마이크 방향에서 상쇄간섭을 일으킴에 따라 반대 방향에서는 보강 간섭을 일으켰기 때문으로 보인다. 또한, Fig. 8에 나타난 바와 같이 음장 측정 위치가 에러마이크로부터 멀어짐에 따라 변화량은 감소하나 소음 증감 영역이 넓어지는 것을 볼 수 있다.
본 결과는 능동소음제어 적용시 공동 터널 내 수중방사소음 측정 결과에 기반하여 실선 추진기 수중방사소음 예측이 어려움을 보여준다. 능동소음제어를 통한 소음 저감은 각도와 거리에 따라 소음저감량이 변화하며, 이로 인해 프로펠러 직상부 및 터널 벽면 압력 계측을 통해 소스레벨을 구할 경우 능동소음제어에 따른 저감량을 과대/과소 예측할 수 있기 때문이다.
이에 능동소음제어를 통한 실선 소음 저감을 위해서는 모형시험 단계의 시험보다는 실선에 대한 시뮬레이션 기반 소음 저감량 예측이 필요함을 보여준다. 또한 실제 프로펠러 소음에 대해 능동소음제어를 적용하기 위해서는 다중 입력 다중 출력(Multiple Input Multiple Output, MIMO) 최적화된 능동소음제어 시스템이 필요함을 보여준다.
IV. 결 론
본 연구는 함정 프로펠러의 수중방사소음 저감을 위한 능동소음제어 적용에 대한 기초 연구로써 진행되었다. 본 연구에서는 선행연구를 통해 검증된 능동소음제어 시뮬레이션을 이용해 수중 프로펠러의 능동소음제어에 따른 소음 저감 성능 및 음장 변화, 능동소음제어 적용을 위한 조건을 알아보았다. 본 연구의 결과를 정리하면 다음과 같다.
(1) 수중 프로펠러 소음의 BPF 성분은 낮은 주파수에 위치하나, 추진기에서 발생한 소음이 충격 파형을 가짐에 따라 저감을 위해서는 높은 샘플링 주파수(~40 kHz)를 필요로 한다.
(2) 프로펠러에서 공동이 발생하는 경우, FxLMS 알고리즘을 통해 Cavitation event를 포함한 추진기 수중방사소음 저감을 위해서는 최소 200 kHz 이상의 샘플링 속도가 필요하다.
(3) SISO 능동소음제어를 통해 수중방사소음을 저감하는 경우 에러마이크 방향의 소음은 저감 가능하나 에러 마이크와 반대 방향의 소음을 증가시키는 결과를 보였다. 이에, 능동소음제어를 통해 전체적인 음장 저감을 위해서는 MIMO 능동소음제어가 필요하다.
따라서, 수중 추진기 소음에 대한 능동소음제어를 위해서는 복조화 및 충격 파형을 고려하기 위한 알고리즘을 추가한 알고리즘 개발이 필요함을 보여줄 뿐 아니라, 전체적인 수중방사소음 저감을 위한 MIMO 시스템 배치 관련 연구도 필요할 것으로 보인다.
