

I. 서 론
II. 배관 누설 탐지 시스템
2.1 단일 센서 모듈의 음원 위치 추정법
2.2 다중 센서 모듈을 활용한 추정법
2.3 누설 음원 위치 추정의 정확도 분석
III. 결 론
I. 서 론
음원의 방향 또는 위치를 측정하는 것은 센서 어레이를 활용하여 가능하다. 이러한 음원 위치 추정은 다양한 산업 분야에서 소음을 식별하는 데 널리 사용되고 있다. 센서 어레이를 이용한 음원 위치 파악 방법으로는 빔포밍 방법, 도달시간차(Time Difference Of Arrival, TDOA) 방법, 음향 인텐시티 방법, 음향 홀로그래피 등과 같은 다양한 전통적인 방법들이 있다. 여러 개의 마이크로폰을 사용한 음원 위치 추정 방법의 정밀도는 마이크의 수, 간격, 샘플 속도에 따라 달라진다.[1] 빔포밍 방법은 센서 어레이의 특이한 비등방성 빔 패턴을 활용하며, 다양한 최적화 알고리즘이 제안되었다. 빔포밍 방법을 사용할 때, 정확한 음원 위치 추정을 하기 위해서 주요 로브의 폭은 가능한 한 좁아야 한다. 마이크 개수가 동일할 경우, 마이크 간격이 커질수록 주요 로브의 폭은 좁아지지만, 측면 로브가 형성되기 때문에 고주파 한계가 낮아진다.[2,3] 마이크 간격을 동일하게 유지시킬 경우, 마이크 개수를 증가시킴으로써 주요 로브의 폭을 줄일 수 있다. 이 경우, 마이크로폰 어레이의 더 큰 물리적 크기가 필요해지며, 이는 빔포밍 기법의 단점으로 언급되곤 했다.[4,5] TDOA 방법은 일반적으로 센서의 수신 신호에서 정확한 시간 지연을 얻기 위한 간단한 배치를 사용하지만, 마이크로폰 어레이의 크기가 작을 때 신호 처리에 높은 샘플링 속도가 필요하다.[6,7,8] 4개에서 6개의 마이크로폰으로 구성된 어레이 마이크로폰을 사용하여 음원 방향을 나타내는 3차원(3D) 음향 인텐시티 벡터를 추정할 수 있으므로, 공간적으로 효율적이며 조밀한 구성으로 가능하다. 음향 인텐시티 방법은 계산 시간에 이점이 있다는 것이 알려져 있다.[6] 해당 방법은 대형 행렬의 역행렬이나 고유값 분해와 같은 비효율적인 계산 과정이 연관되어 있다.
본 연구에서는, 4채널 마이크로폰을 정사면체 형태로 배열하여 하나의 센서 모듈로 설계해, 앞서 설명한 3차원 음향 인텐시티 벡터를 활용한 기법을 사용하여 잔향 및 반향 영향이 큰 환경에서 배관 누설 소음을 탐지할 수 있는 시스템을 설계하고 검증한다. 실제 환경에서의 적용 가능성을 고려하여, 반향과 잔향이 큰 환경에 여러 개의 센서 모듈을 배치하고, 여러 쌍의 센서 모듈로부터 얻은 3차원 벡터 간 교점을 이용해 음원이 위치한 지점들을 추정한다. 여러 쌍의 센서 모듈로부터 얻은 3차원 벡터 간 교점들 중 이상치(예, 반사의 영향으로 현장 외부로 추정된 지점, 주변 구조물에 의한 회절 영향으로 평균 지점에서 먼 지점으로 추정된 지점 등)를 검출해 제외하는 알고리즘을 제안한다. 마지막으로, 현장의 도면 상에 누설음 추정 위치 좌표를 1 s 내에 실시간으로 시각화하여 누설음이 발생한 위치를 즉각적으로 파악할 수 있는 시스템을 구성하고 검증한다. 본 연구를 통해 대형 플랜트의 사고 대응 능력 향상 및 안전성 확보에 기여할 수 있을 것으로 기대된다.
II. 배관 누설 탐지 시스템
2.1 단일 센서 모듈의 음원 위치 추정법
3차원 음향 인텐시티 벡터를 구하기 위해 4개의 마이크로폰으로 구성된 센서 모듈을 활용했다. 4채널 마이크로폰은 3차원 음향 인텐시티 벡터를 얻기 위해 직교 또는 다각형 구성으로 배열되어야 한다. 마이크로폰을 정사면체 구성으로 배열하는 것이 가장 작은 다각형에 해당하므로, 정사면체 형상을 가진 센서 모듈로부터 측정한 방향 벡터는 전방향에 대해 유효하다. Fig. 1과 같이 4채널 센서를 정사면체 형태로 배열한 센서 모듈을 구성하였다. 각 센서간 거리는 d로 정의되었으며, 30 mm의 값을 이용했다. 3차원 음향인텐시티 벡터 활용 기법을 통해 3차원 음원 위치 추정의 구체적인 방식은 다음과 같다.
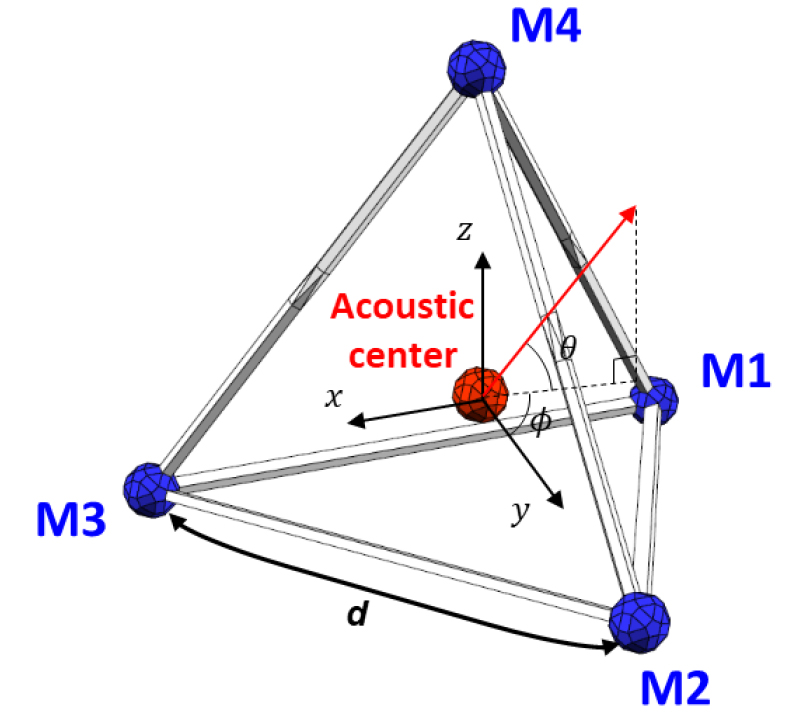
4개 센서(M1-M4) 중 음향 중심으로부터 y축 방향에 M2가, x축 방향에 M3가, z축 방향에 M4가 위치하게 한 센서 모듈에서 측정한 신호 , 를 이용해 상호 파워스펙트럼 밀도함수(Cross-Power Spectral Density, CPSD) 에 대해 음향 인텐시티 벡터를 표현하면 다음과 같다.[9,10]
여기서 𝜌는 공기의 밀도, 𝜔는 음파의 각진동수를 의미한다. 음원을 향하는 벡터가 갖는 방위각 𝜙 및 고도각 𝜃를 계산하면, 다음과 같이 표현할 수 있다.
이와 같은 정식화 방법에는 반사음에 의한 영향, 유한 차분에 의한 오차, 탐지하고자 하지 않는 잡음에 의한 오차 등이 있다. 이를 해결하기 위해 다음과 같은 신호처리 기법을 적용했다.
(1) 직접음과 반사음 간 시간 지연 차에 의해 보강/상쇄 간섭이 발생한다. 이전 연구 결과에 따르면[9,10] 해당 영향은 1/3 옥타브 밴드 합을 활용 시 크게 저감될 수 있다. 본 연구에서는 =30 mm이므로, 의 중심주파수를 가지는 1/3 옥타브 밴드 합을 활용했다. (2) 음향 인텐시티 계산에 필요한 입자 속도를 유도할 때, 유한 차분을 사용하면 2 kHz 이상 고주파수 대역에서 오차가 커지는 경향이 나타나므로,[11] 입자 속도를 유도할 때 위상 구배 값을 활용했다. (3) 탐지하고자 하는 음원이 아닌 잡음에 의해 신호처리의 오차가 발생하고, 이 영향을 줄이기 위해 서로 다른 센서 신호 간 낮은 Coherence가 나타나는 주파수 대역의 값을 무시하는 방법을 활용하였다.
2.2 다중 센서 모듈을 활용한 추정법
본 절에서는 서로 다른 센서 모듈로부터 얻은 방위각 및 고도각을 활용해 음원 위치를 추정하는 방식을 설명한다. 실제 센서 모듈을 설치한 환경은 Fig. 2에 정리했으며, 해당 센서 모듈의 네트워크를 활용해 누설음의 위치를 판가름할 수 있도록, 가상 누설음 음원을 Fig. 3과 같이 설치했다.
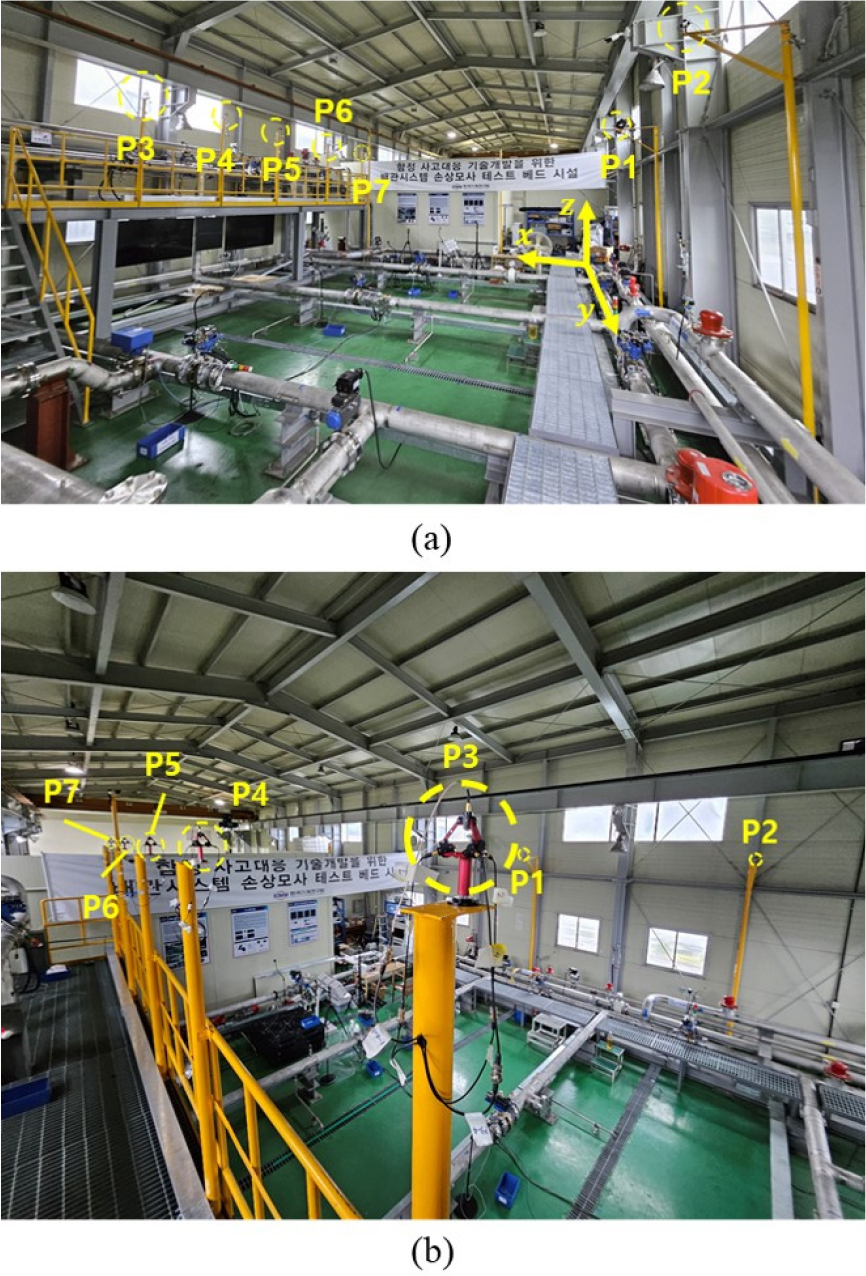
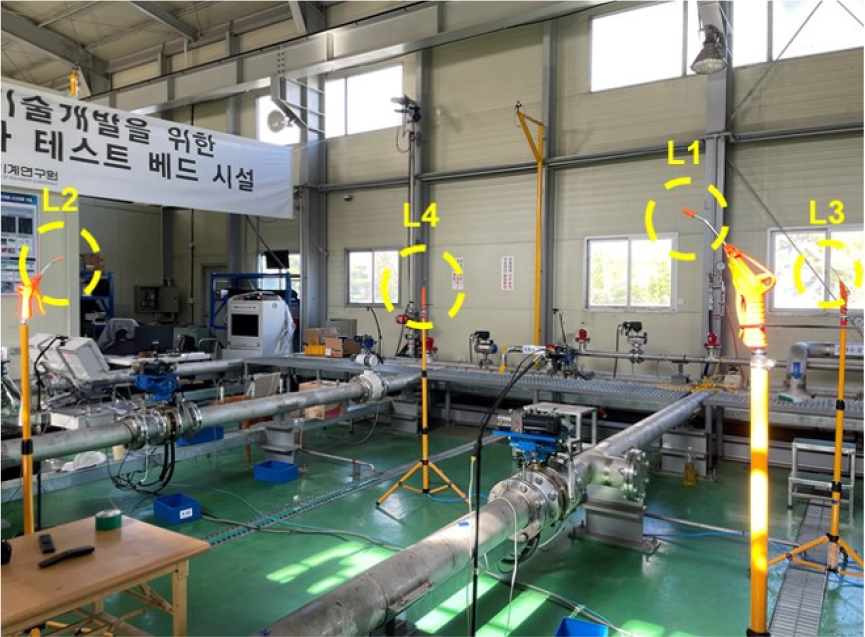
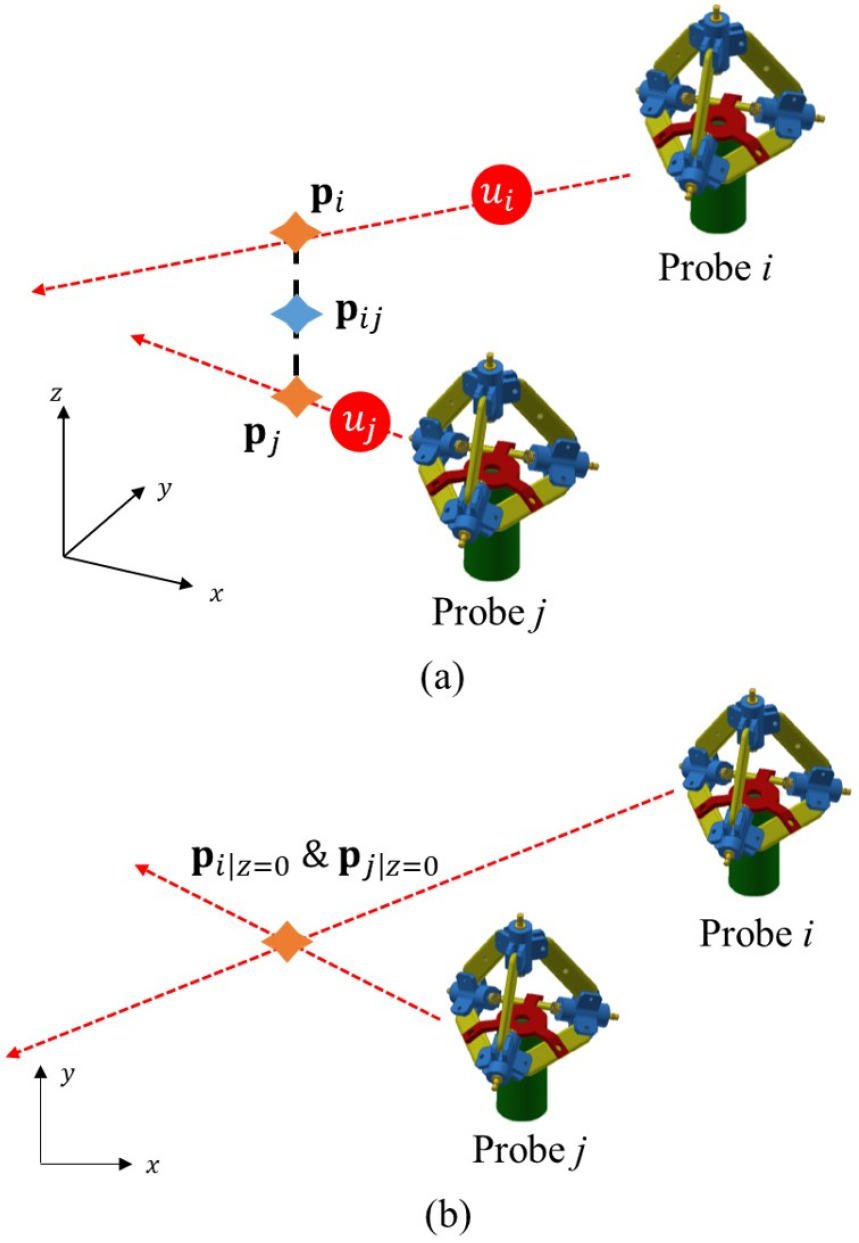
Fig. 4(a)와 같이 한 쌍의 센서 모듈로부터 구한 방향 벡터 간 교점이 발생하지 않는 공간 상 꼬인 위치 문제가 발생하므로, 2개의 서로 다른 센서 모듈(Probe i, j)로부터 얻은 3차원 공간 벡터( 및 ) 간의 꼬인 위치는 Fig. 4(b)와 같이 xy 평면으로 투영시킨 2차원 벡터 간의 교점( 및 )을 구한 후, z축 상에서 해당 교점 간의 중심점()으로 위치를 추정했다.
여러 쌍의 센서 모듈로부터 추정한 음원 위치는 현장의 다양한 산란체(배관, 각종 구조물) 및 반사면(벽, 천장, 바닥 등)의 환경적 영향으로 추정 오차가 발생하게 된다. 따라서, 음원 위치 추정 정확도를 높이기 위해 다음과 같이, 규칙 기반 이상치 탐지 방법 및 표준 편차 기반 이상치 탐지 방법을 이용해 정확도를 향상시켰다.
서로 가까운 위치에 있는 센서 모듈로부터 얻은 공간 벡터가 서로 비슷한 각도를 가리키게 되면 현장의 반사면 영향으로 외부에 존재하는 교점을 추정하게 된다. 이를 해소하기 위해 규칙 기반 이상치 탐지 방법을 적용했으며, 현장 외부로 추정된 이상치를 제외하는 알고리즘을 적용시켰다. 보다 상세히, 현장의 바닥 위부터 천장 이하, 벽면 내부 교점만 음원 위치 추정에 활용했다. 규칙 기반 이상치 탐지를 통해 제외하고, 음원 위치 추정에 활용한 공간 좌표의 집합은 다음과 같이 표현할 수 있다.
여기서 , , 는 각각 공간 위치 벡터 의 x, y, z 요소를 의미한다.
센서 모듈과 가까운 곳에 위치한 산란체의 영향으로, 특정 센서 모듈로부터 추정된 교점은 현장 내부에 위치하더라도 평균 위치에서 동떨어진 곳에 추정될 수 있다. 따라서, 현장 내부에 위치한 교점 간의 좌표 평균을 다음과 같이 정의했다.
여기서 n은 Eq. (6)의 집합 S에 속하는 공간 좌표의 개수이며, 해당 평균 좌표 에서 가장 거리가 먼 이상치를 검출해 차례로 제외했다. 제외한 교점의 개수에 따라 추정 좌표 간의 분산을 정리하면 Fig. 5와 같다.
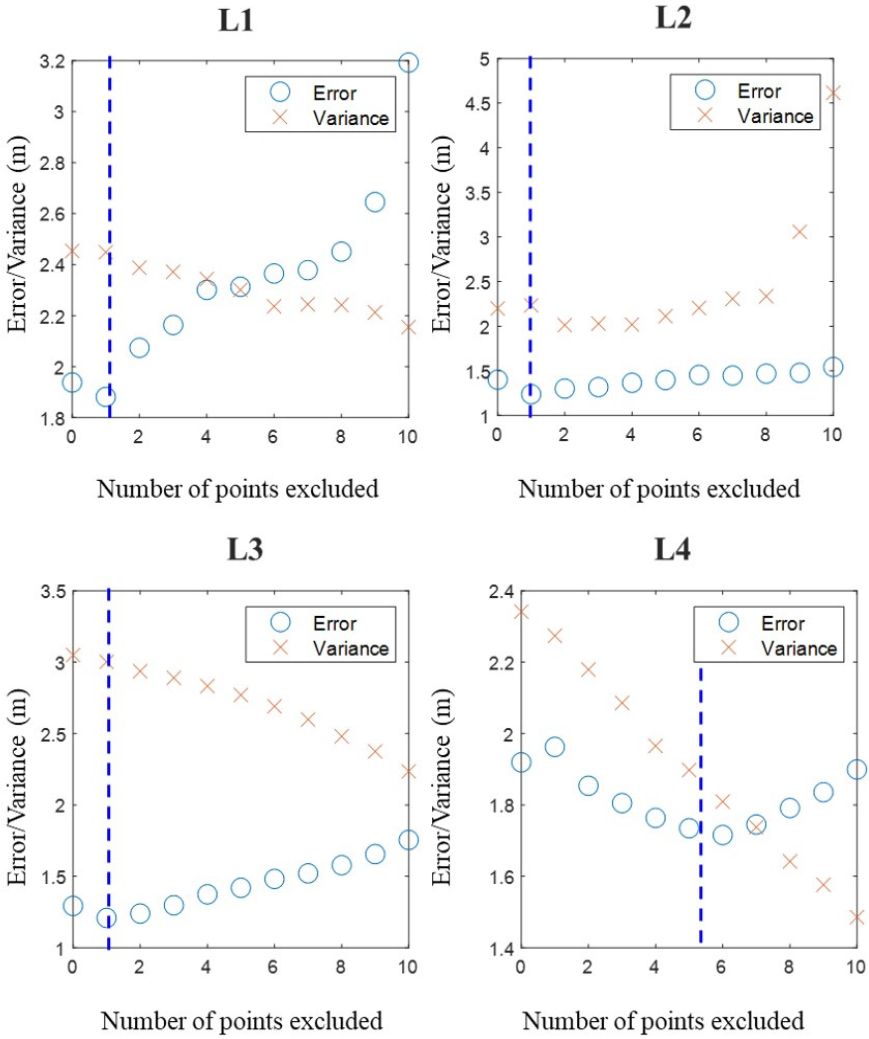
Fig. 5에 정리한 Error는 실제 음원 위치와 모든 추정 위치의 거리의 합을 의미하며, Variance는 앞서 설명한 세 단계의 알고리즘을 통해 얻은 모든 추정 위치들 간의 분산 합을 집합 S에 속하는 공간 좌표의 개수로 나눈 값을 나타낸다. 서로 다른 네 곳의 가상 음원 위치에 대해 분산 및 오차를 분석한 결과, 총 6개의 교점을 제외하는 것이 가장 적합하다는 결론을 얻었다. 따라서, 현장 외부로 추정된 이상치와 평균 지점으로부터 가장 멀리 떨어진 6개의 이상치를 제외한 나머지 지점의 평균 지점으로 추정한다.
2.3 누설 음원 위치 추정의 정확도 분석
누설 음원 위치 추정 시스템의 검증을 위해 총 네 개의 가상 음원 위치에 대해 정확도 분석을 수행하였다. Fig. 3과 같이 배치한 가상 음원 위치에서 에어건을 분사해 백색 소음을 유발하고 있을 때 10 s 간 1 s 간격으로 추정하였다. 에어건 분사 시, Signal-to-Noise(S/N) ratio는 2 kHz를 중심주파수로 하는 1/3 옥타브 밴드에 대해 21 dB로 나타났다.
Table 1에는 매 초마다 추정한 음원 위치와 실제 음원 위치의 거리를 정리했다. Table 1에 정리한 것처럼, L1과 L2 위치에 음원이 존재할 때는 10 s간 추정한 결과가 실제 음원 위치와 모두 1 m 이내의 오차를 가진다. 반면에, L3와 L4 위치에 음원이 존재할 때는, 평균적으로 1 m 이상의 오차를 갖게 된다.
Table 1.
Error of estimated source locations for every second.
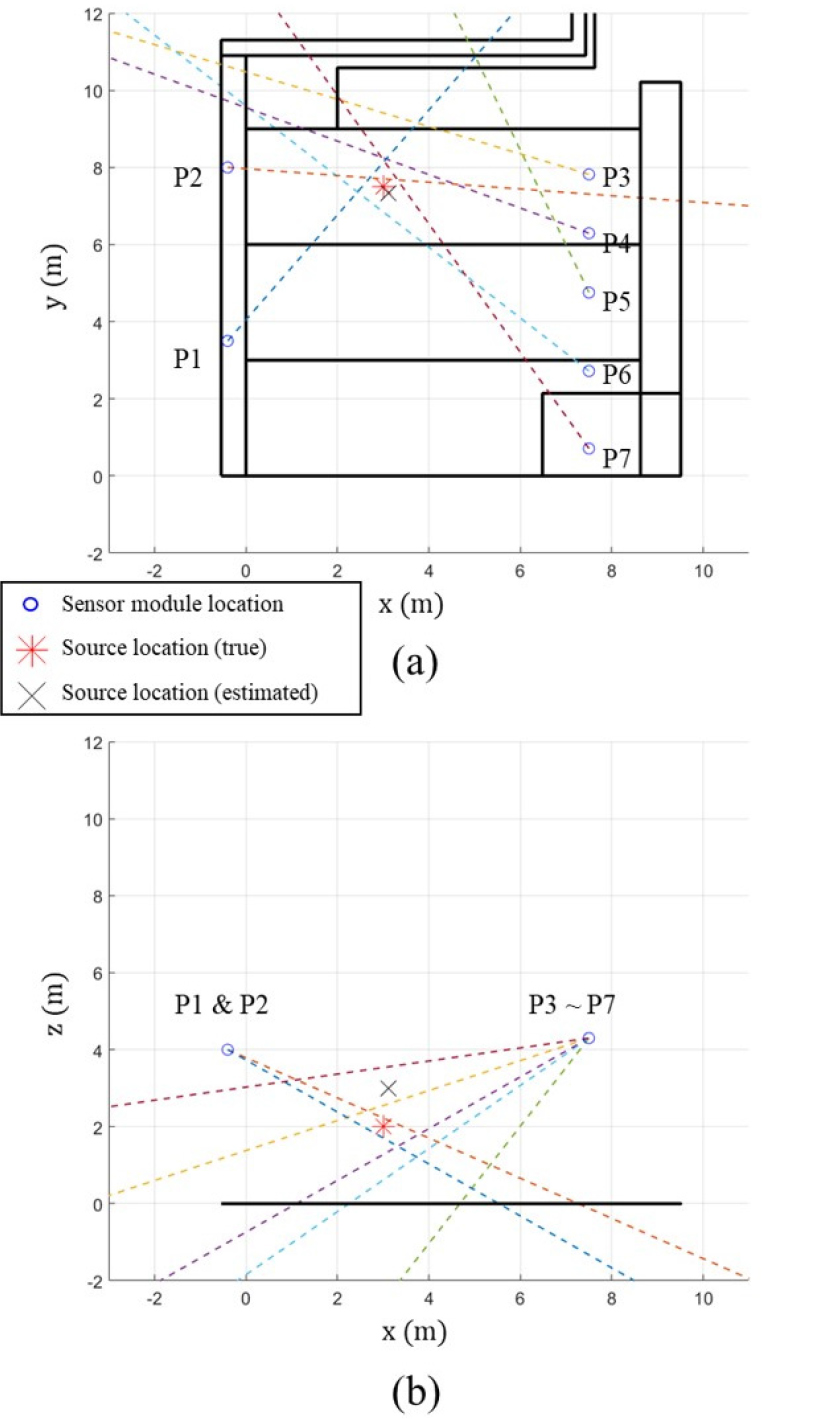
오차 분석을 위해 Figs. 6, 7, 8, 9에는 각 누설음 위치에 대해 오차가 가장 크게 나타났던 시간 구간에 대해 1 s간 측정한 데이터를 이용해 추정한 음원 위치를 xy 평면(상단) 및 xz 평면(하단)에 표현했다. 또한, 각 센서 모듈이 얼마나 큰 오차를 갖는지 확인하기 위해, 푸른 원으로 표시한 각 모듈의 위치로부터 인텐시티 벡터의 방향을 직선으로 이어 표현했다. 굵은 검정 직선은 현장의 배관 도면을 나타낸다.
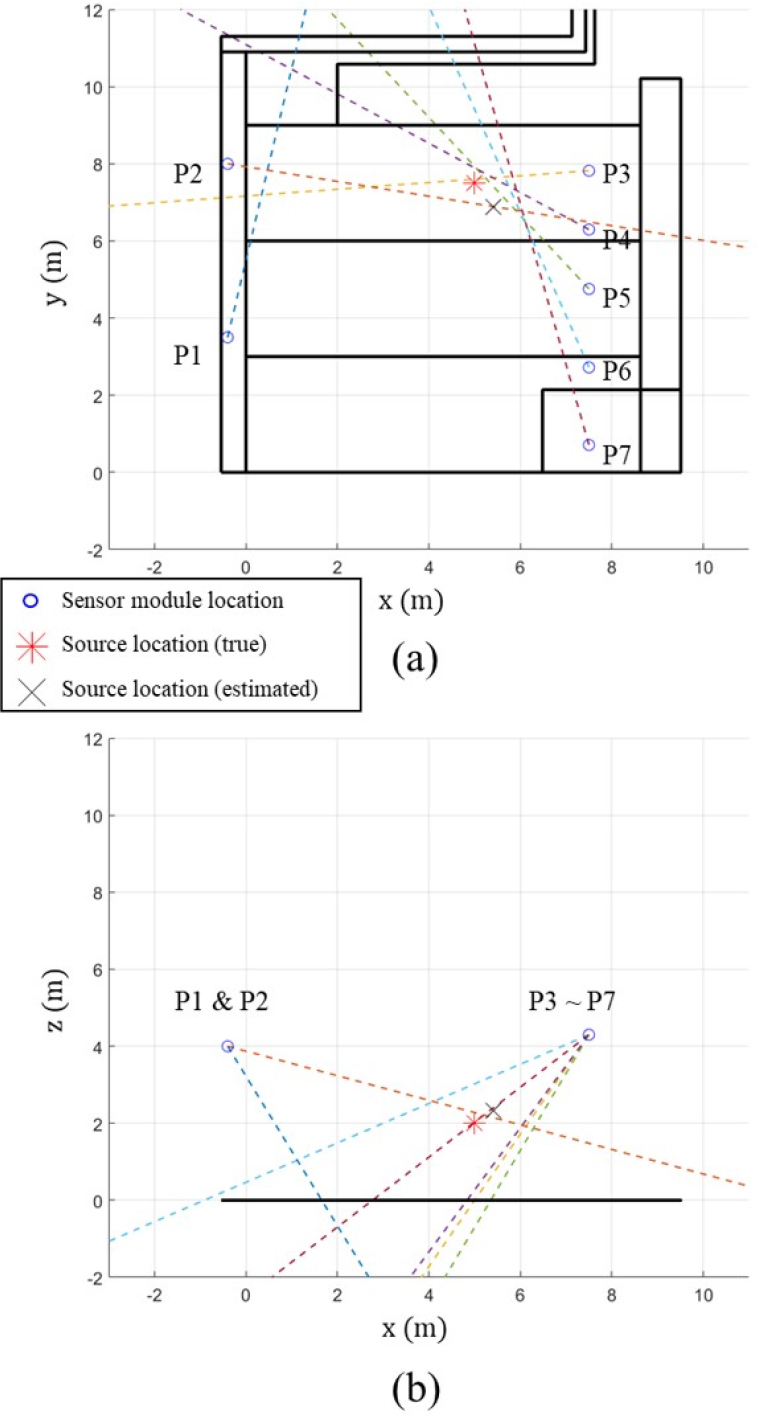
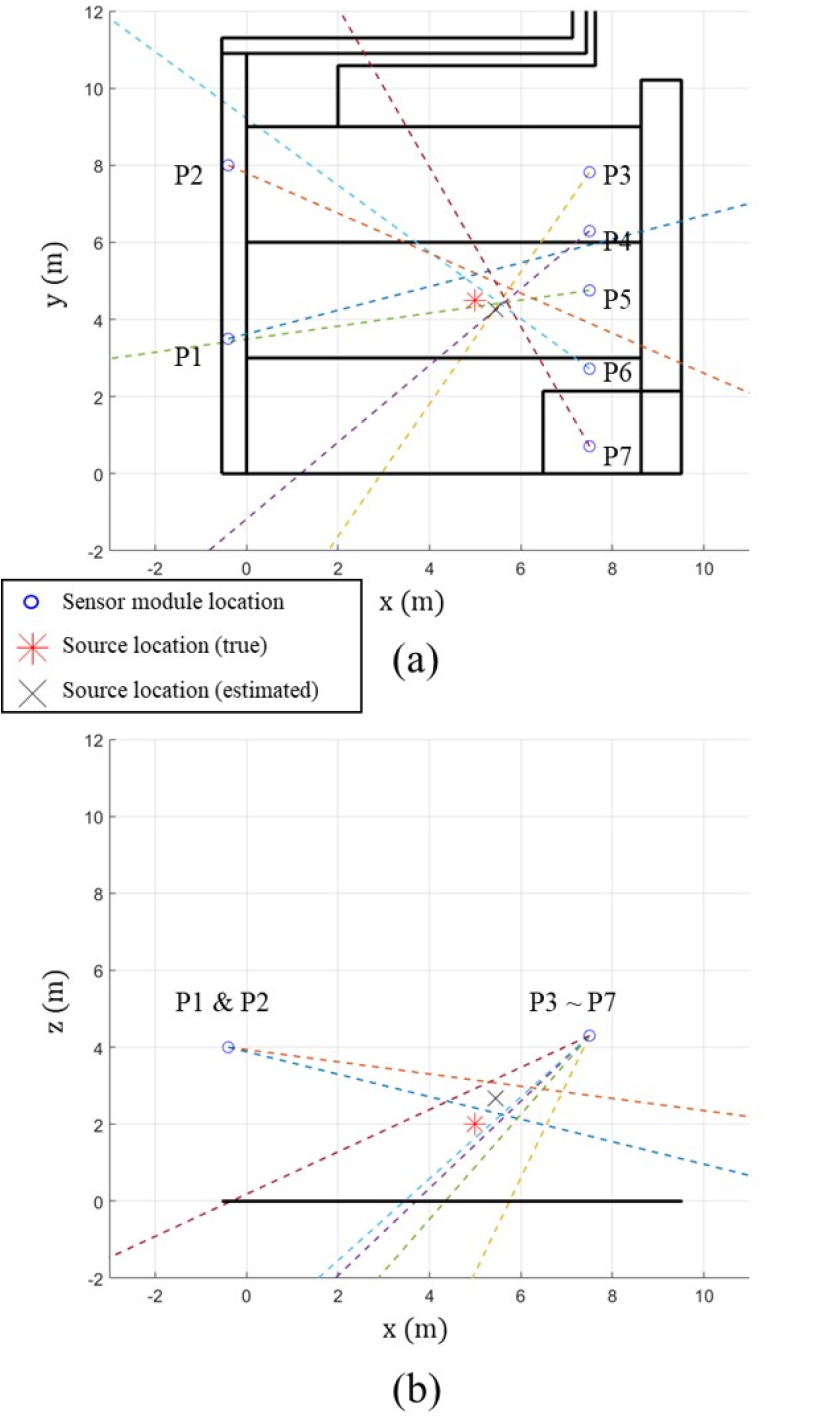
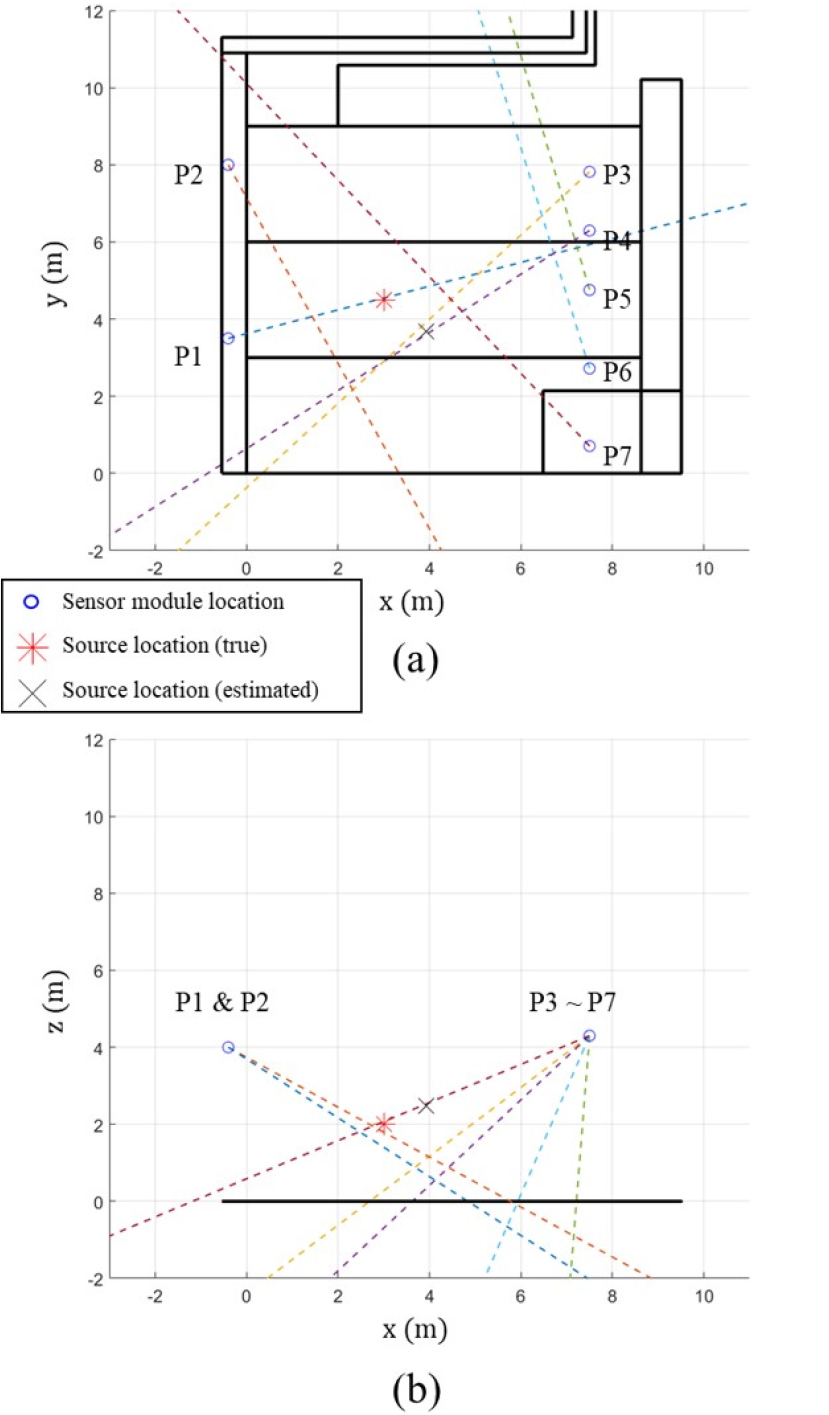
Figs. 6과 7에 나타난 것처럼, 가상 누설 소음 위치 L1, L2에 대해서는 1 m 미만의 오차로 정확도 높은 음원 위치 추정이 가능했으며, Fig. 6(a)의 P1, Fig. 7(b)의 P2 등의 예시와 같이 특정 센서 모듈로부터 측정한 인텐시티 벡터가 현장의 반사음에 의해 잘못된 방향으로 향해도, 본 연구에서 제안한 다중 센서 모듈의 추정 알고리즘이 적합하다는 것을 검증할 수 있었다.
Figs. 8과 9에 나타난 것처럼, 가상 누설 소음 위치 L3 및 L4에 대해서는 10 s간 평균적으로 1.0 m 이상의 오차를 가진 것으로 나타났다. 이는 해당 소음 위치가 근방의 장애물과 센서 모듈 근방의 장애물 간의 간섭이 심한 위치이기 때문이다. 또한, 센서 모듈 P2와 P3가 음원 위치 L3와 xy 평면 상 직선 상에 위치하고, 센서 모듈 P1과 P4가 음원 위치 L4와 xy 평면 상 직선 상에 위치하고 있어, 두 센서 모듈로부터 얻은 공간 벡터 간 교점이 실제 위치에서 크게 벗어났기 때문인 것으로 분석하였다. 그럼에도, 규칙 기반 이상치 검출을 통해, 해당 이상치들은 음원 추정에서 제외가 되어 오차를 줄일 수 있었다. 다만, 이런 이유로 음원 위치 L1 및 L2에 비해서 평균할 수 있는 데이터의 숫자가 적어 오차의 편차가 시간에 따라 크게 변동되는 것으로 확인되었다.
결론적으로, 반사 및 잔향의 영향으로 일부 센서 모듈이 적절한 방향을 예측하지 못하더라도, 본 연구에서 제안한 다중 센서 모듈을 활용한 음원 위치 추정 알고리즘을 적용하면 매 초마다 1 m 내외의 오차로 누설 소음의 위치를 예측할 수 있음을 검증하였다.
III. 결 론
본 연구에서는 배관 누설 소음을 탐지하기 위한 다채널 센서 모듈의 설계와 활용성을 검증하였다. 정사면체 형태로 배열된 4채널 마이크로폰을 통해 음원의 위치를 3차원 벡터로 표현하는 기술을 적용했다. 또한, 다수의 센서 모듈을 잔향 및 반향 영향이 큰 환경에 배치하여 이상치를 검출해 추정 결과 산출에서 제외하는 알고리즘을 제안해, 실제 음원의 위치를 추정하는 시스템을 제안했다. 이러한 연구 결과를 토대로, 현장의 좌표 평면 상에 누설음 추정 위치를 실시간으로 가시화할 수 있어, 사고 발생 시 즉각적인 대응이 가능할 것으로 기대된다. 즉, 이러한 시스템은 대형 플랜트의 사고 대응 능력 향상과 안전성 확보에 기여할 것으로 예상된다. 본 연구는 플랜트 대형사고 방지를 위한 향후 관련 연구 및 산업 현장에서의 적용 가능성을 높일 것으로 기대된다.
