

I. 서 론
음원의 위치 추정은 레이더, 소나, 통신, 지질학 등 광범위한 분야에서 중요하게 다루어지고 있다.[1] 음원의 위치 추정 문제는 음원의 위치에 따라 원거리 음원, 혹은 근거리 음원으로 나누어진다. 현재까지 많은 음원의 위치 추정 기법들이 원거리 음원 혹은 근거리 음원 각각의 경우에 대해 다루고 있으나 두 가지 모두 가능한 경우에 대해서는 많이 다루어지고 있지 않다.[2,3] 음원의 위치를 결정하기 위해서는 원거리인 경우 방위각 정보가 필요하며, 근거리인 경우 방위와 함께 거리 정보가 필요하다.
음원의 위치 추정에서 센서 배열의 종류를 살펴보면 구조가 단순한 균일 선배열이 주로 다루어 졌다. 그러나 균일 선배열이 수평방향의 방위각만 추정가능한 반면 균일 환영 배열은 방위각과 고각을 구분 가능하며 360° 전방위를 동일한 빔폭으로 탐색할 수 있다. 때문에 균일 환영 배열을 이용한 많은 기법들이 제안되었으며 이중 가장 일반적으로 음원의 위치를 추정하는 기법은 Multiple Signal Classification (MUSIC)이다. MUSIC 기법은 다수의 음원이 존재 하더라도 높은 정확도로 음원의 위치를 추정할 수 있는 장점이 있지만 고유치분해와 탐색과정에서 매우 많은 연산을 요구한다.[1]
최근 음원의 원거리 위치 추정에서 균일 환영 배열에서 센서가 가지는 대칭성에 기반하여, 상관함수와 최소자승 기법(least square method)으로 단일 음원의 위치를 추정하는 기법이 제안되었으며,[4] 기존 기법의 대칭성 제약을 극복하기 위해 보다 일반화된 기법[5]이 제안되었다. 또한 근거리 위치 추정에서 균일 환영 배열의 대칭성을 이용하여 두 단계의 상관함수와 최소자승 기법으로 음원의 위치를 추정하는 기법[6]이 제안되었으며, 기존 기법이 4배수의 센서수를 가져야 한다는 제약점을 극복한 기법 또한 Reference [7]에서 제안되었다.
본 논문에서는 보다 실제적인 환경을 고려하여 단일 음원이 원거리와 근거리 모두 존재 가능한 경우에 대해 위치 추정 기법을 제안한다. 제안 기법은 먼저 음원의 위치를 원거리 음원이라 가정하여 방위와 고각을 구하고, 구해진 방위와 고각으로 거리를 추정한다. 추정된 거리를 Fresnel region[6,7]에 적용하여 최종으로 원거리/근거리 음원을 구분한다. 제안 기법은 앞선 논문들과 마찬가지로 상관함수와 최소자승 기법을 이용하므로 MUSIC 기법에 비해 매우 적은 연산량을 필요로 하는 이점이 있다.
II. 신호모델
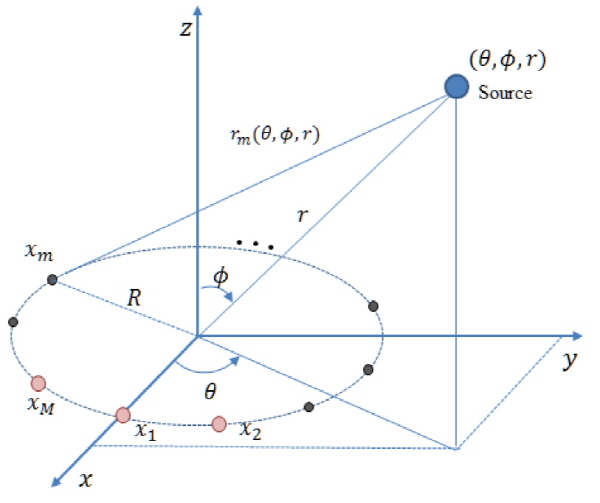
Fig. 1은 균일 환영 배열에서  개의 전 방향성(omni-directional)센서가 단일 협대역(narrow band) 음원으로부터 신호를 수신하는 상황을 나타낸다. 음원의 위치는
개의 전 방향성(omni-directional)센서가 단일 협대역(narrow band) 음원으로부터 신호를 수신하는 상황을 나타낸다. 음원의 위치는  축 기준 반시계방향으로 방위
축 기준 반시계방향으로 방위 
 ,
,  축 기준 아래 방향으로 고각
축 기준 아래 방향으로 고각  에 위치하며 거리는 균일 환영 배열의 중심에서부터 측정된다.
에 위치하며 거리는 균일 환영 배열의 중심에서부터 측정된다.  번째 센서에서
번째 센서에서  시간에 수신되는 신호
시간에 수신되는 신호  은 아래와 같다.[6,7]
은 아래와 같다.[6,7]
 , (1)
, (1)
여기서  ,
,  이다.
이다.  은
은  의 신호 전력(signal power)을 가지는 협대역 복소 신호(narrow-band complex signal)이며
의 신호 전력(signal power)을 가지는 협대역 복소 신호(narrow-band complex signal)이며  은
은  의 신호 전력을 가지고 평균이 0인 복소 백색 가우시안 잡음 (zero-mean white complex Gaussian noise)이다.
의 신호 전력을 가지고 평균이 0인 복소 백색 가우시안 잡음 (zero-mean white complex Gaussian noise)이다.  은 공간적/시간적으로
은 공간적/시간적으로  과 독립적이라고 가정한다.
과 독립적이라고 가정한다.  는 음원의 파장을 나타내며,
는 음원의 파장을 나타내며, 
 은 음원으로부터
은 음원으로부터  번째 센서까지의 거리로 아래와 같다.
번째 센서까지의 거리로 아래와 같다.
 , (2)
, (2)
여기서  ,
, 
 이다.
이다.  은
은  축을 기준으로 반시계 방향으로 측정된 각도를 의미하며
축을 기준으로 반시계 방향으로 측정된 각도를 의미하며  은 배열의 반경이다.
은 배열의 반경이다.  인 경우 2차 테일러 시리즈 확장(Taylor series expansion)에 따르면
인 경우 2차 테일러 시리즈 확장(Taylor series expansion)에 따르면  은 아래 식과 같이 간략화 될 수 있다.[6,7]
은 아래 식과 같이 간략화 될 수 있다.[6,7]
 . (3)
. (3)
Eq.(3)을 Eq.(1)에 대입하면 아래 식을 얻는다.
 . (4)
. (4)
Eq.(4)의 첫 번째 지수는 방위, 고각의 함수이며 두 번째 지수는 방위, 고각, 거리의 함수이다. 음원이 원거리에 존재하는 경우 두 번째 지수가 0으로 가기 때문에 생략 가능하므로, 원거리 모델은 근거리 모델의 특수한 경우로 생각할 수 있다.
III. 제안기법
3.1 원거리/근거리 음원의 방위 추정
임의의 센서  에 대해 먼저 다음과 같은 상관함수를 정의한다.
에 대해 먼저 다음과 같은 상관함수를 정의한다.
여기서  은 복소 켤레(complex conjugate)를 의미한다. 이때 수신된 신호에서 신호성분만 고려하면
은 복소 켤레(complex conjugate)를 의미한다. 이때 수신된 신호에서 신호성분만 고려하면  의 위상은
의 위상은
 (6)
(6)
이다. 여기서 지수항의 첫 번째 항 

 은 음원의 원거리 모델만 담당하는 부분이며 두 번째 항
은 음원의 원거리 모델만 담당하는 부분이며 두 번째 항 
 을 포함하면 근거리 모델이 된다. 음원이 원거리인 경우 두 번째 항은 0이 되며, 음원이 근거리에 있다 하더라도 가정에서
을 포함하면 근거리 모델이 된다. 음원이 원거리인 경우 두 번째 항은 0이 되며, 음원이 근거리에 있다 하더라도 가정에서  이고, 일반적으로
이고, 일반적으로
 을 만족하므로 두 번째 항은 0에 가깝다. 따라서 방위와 고각을 독립적으로 구하기 위해 이를 생략하면
을 만족하므로 두 번째 항은 0에 가깝다. 따라서 방위와 고각을 독립적으로 구하기 위해 이를 생략하면
 (7)
(7)
이다. Eq.(7)은 다음과 같이 벡터의 곱으로 정리할 수 있다.
 , (8)
, (8)
여기서  의 위상 모호성(phase ambiguity)이 존재하지 않기 위해서는
의 위상 모호성(phase ambiguity)이 존재하지 않기 위해서는  의 조건을 만족해야 한다.[8]
의 조건을 만족해야 한다.[8] 로 가정하고 Eq.(8)을 균일환영배열이 가질 수 있는 다수의 센서쌍에 대해 정리하면 다음의 행렬식으로 표현된다.
로 가정하고 Eq.(8)을 균일환영배열이 가질 수 있는 다수의 센서쌍에 대해 정리하면 다음의 행렬식으로 표현된다.
 , (9)
, (9)
 , (10)
, (10)
 ,
, . (12)
. (12)
실제 알고리즘에서는  를 추정치인
를 추정치인 

 로 대치하여야 한다. 여기서
로 대치하여야 한다. 여기서 

 이다. Eq.(9)로부터 방위를 구하기 위한 최적해는 다음의 최소자승법으로 구한다.
이다. Eq.(9)로부터 방위를 구하기 위한 최적해는 다음의 최소자승법으로 구한다.
 . (13)
. (13)
Eq.(13)으로부터 음원의 방위와 고각은 다음으로 각각 추정된다.
 , (14)
, (14)
 . (15)
. (15)
따라서 위 수식을 따를 경우 음원이 원거리에 존재하는 경우는 정확한 모델이 되며, 근거리에 있다하더라도 가정에 따라 방위와 고각 추정에 오차는 크지 않다.
3.2 거리 추정과 원거리/근거리 음원 구분
Eq.(6)에서  와
와  는 앞 절의 방위와 고각 추정으로 결정된 값이므로 거리
는 앞 절의 방위와 고각 추정으로 결정된 값이므로 거리  에 대해 정리하면 다음과 같다.
에 대해 정리하면 다음과 같다.
이를 다수의 센서쌍에 대해 행렬 형태로 정리하면 다음과 같다.
 , (17)
, (17)
 ,
, ,
, . (20)
. (20)
방위와 고각 추정과 마찬가지로 최소자승 기법과 다음 식으로 거리를 추정한다.
 , (21)
, (21)
 . (22)
. (22)
마지막으로 음원의 원거리/근거리 구분은  이
이  로 Fresnel region에 속하는 경우 근거리 음원으로 판단하며,
로 Fresnel region에 속하는 경우 근거리 음원으로 판단하며, 

 에 속하는 경우 원거리 음원으로 판단하고 방위각만 결정하게 된다. 여기서
에 속하는 경우 원거리 음원으로 판단하고 방위각만 결정하게 된다. 여기서  는 센서 배열의 개구간(aperture)이다.
는 센서 배열의 개구간(aperture)이다.
제안기법의 파라미터  과 센서 반경
과 센서 반경  에 대해 설명하면, 가능한 모든
에 대해 설명하면, 가능한 모든  에 대해 모호성이 발생하지 않기 위해서는
에 대해 모호성이 발생하지 않기 위해서는  의 조건이 만족되어야 한다. 그러나 제안기법에서는 상호상관을 계산하는 두 센서의 간격이
의 조건이 만족되어야 한다. 그러나 제안기법에서는 상호상관을 계산하는 두 센서의 간격이  이하인 경우 모호성이 발생하지 않기 때문에
이하인 경우 모호성이 발생하지 않기 때문에  의 값에 따라
의 값에 따라  의 조건을 가질 수 있다. 예를 들어 센서의 수가
의 조건을 가질 수 있다. 예를 들어 센서의 수가  이고 배열의 반경
이고 배열의 반경  을 만족하는 경우 인접 센서 간 간격은
을 만족하는 경우 인접 센서 간 간격은  를 가지므로[9] 제안 기법에서
를 가지므로[9] 제안 기법에서  인 경우 위상 추정에서 모호성이 발생하지 않는다.
인 경우 위상 추정에서 모호성이 발생하지 않는다.
연산량에서 제안 기법의 경우 Eq.(5)의 상관함수를 계산하는데  의 곱연산이 필요하며
의 곱연산이 필요하며 
 의 합연산이 필요하다. 여기에 Eqs.(13)과 (21)의 최소자승 기법을 수행하는데 각각
의 합연산이 필요하다. 여기에 Eqs.(13)과 (21)의 최소자승 기법을 수행하는데 각각 의 연산이 필요하다.[7] 반면 MUSIC 기법의 경우
의 연산이 필요하다.[7] 반면 MUSIC 기법의 경우  의 곱연산과
의 곱연산과  의 합연산이 공분산(covariance) 행렬을 구하는데 필요하며 고유치 분해에
의 합연산이 공분산(covariance) 행렬을 구하는데 필요하며 고유치 분해에  연산량을 필요로 한다.[7] 여기에 추가적으로 첨두치를 찾기 위한 3차원 탐색과정이 필요하므로 탐색과정 만큼 연산량이 증가한다.
연산량을 필요로 한다.[7] 여기에 추가적으로 첨두치를 찾기 위한 3차원 탐색과정이 필요하므로 탐색과정 만큼 연산량이 증가한다.
IV. 모의 실험
제안한 알고리즘의 성능을 비교 검증하기 위해 MUSIC 기법과 함께 모의 실험을 수행하고 CRLB (Cramer-Rao Lower Bound)[10]와 함께 RMSE (Root Mean Square Error)를 비교하였다. 이때 음원의 위치는 원거리일 경우  를 가정하였으며 근거리일 경우 거리에 따른 성능비교를 위해
를 가정하였으며 근거리일 경우 거리에 따른 성능비교를 위해  ,
,  두 가지를 고려하였다. 배열의 센서 수는
두 가지를 고려하였다. 배열의 센서 수는  이며 반경
이며 반경  이다. 실험은
이다. 실험은  의 표본을 이용하여 수행하였으며 제안한 기법은 위상추정의 모호성을 피하기 위해
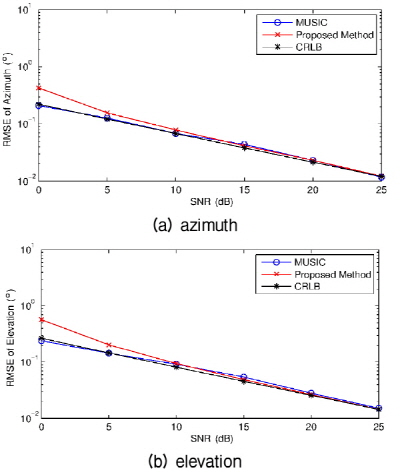
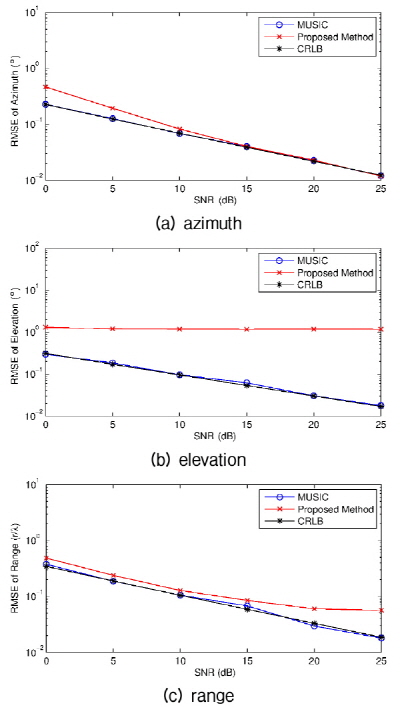
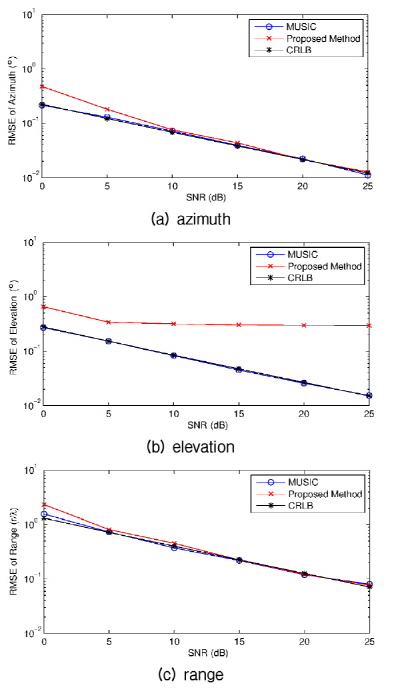
의 표본을 이용하여 수행하였으며 제안한 기법은 위상추정의 모호성을 피하기 위해  을 이용하였다. 모의실험 결과는 Fig. 2에서 Fig. 4에 나타내었다. 그림에서 Fig. 2는 원거리 음원의 위치 추정 성능을 나타내며 Fig. 3, Fig. 4는 근거리 음원의 위치 추정 성능을 나타낸다. 실험 결과 원거리 음원의 위치 추정에서 방위와 고각 추정은 Figs. 2(a)와 2(b)에서 각각 확인 할 수 있듯이 SNR(Signal to Noise Ratio)이 올라감에 따라 MUSIC기법과 CRLB에 거의 근접하는 성능을 보였다. 반면 근거리 음원의 위치 추정에서 방위와 거리 추정은 Figs. 3(a), 4(a)와 3(c), 4(c)에서 SNR에 따라 오차가 감소하는 양상을 보이지만 Figs. 3(b)와 4(b)의 고각 추정에서는 제안 기법의 오차가 일정이하로 낮아지지 않는 결과를 보였다. 이는 제안 기법이 원거리/근거리 음원을 모두 고려하기 위해 Eq.(6)에서 크기가 작은 지수의 두 번째 항을 0으로 가정한데서 나타나는 영향으로 이러한 오차가 주로 고각 추정에서 나타나는 것을 확인하였다. 이 수치는 Eq.(6) 지수 두 번째 항의 분모에 있는
을 이용하였다. 모의실험 결과는 Fig. 2에서 Fig. 4에 나타내었다. 그림에서 Fig. 2는 원거리 음원의 위치 추정 성능을 나타내며 Fig. 3, Fig. 4는 근거리 음원의 위치 추정 성능을 나타낸다. 실험 결과 원거리 음원의 위치 추정에서 방위와 고각 추정은 Figs. 2(a)와 2(b)에서 각각 확인 할 수 있듯이 SNR(Signal to Noise Ratio)이 올라감에 따라 MUSIC기법과 CRLB에 거의 근접하는 성능을 보였다. 반면 근거리 음원의 위치 추정에서 방위와 거리 추정은 Figs. 3(a), 4(a)와 3(c), 4(c)에서 SNR에 따라 오차가 감소하는 양상을 보이지만 Figs. 3(b)와 4(b)의 고각 추정에서는 제안 기법의 오차가 일정이하로 낮아지지 않는 결과를 보였다. 이는 제안 기법이 원거리/근거리 음원을 모두 고려하기 위해 Eq.(6)에서 크기가 작은 지수의 두 번째 항을 0으로 가정한데서 나타나는 영향으로 이러한 오차가 주로 고각 추정에서 나타나는 것을 확인하였다. 이 수치는 Eq.(6) 지수 두 번째 항의 분모에 있는  로 인해 음원의 거리가 멀어질수록 줄어들며 Figs. 3(b)와 4(b)의 비교로 확인할 수 있다.
로 인해 음원의 거리가 멀어질수록 줄어들며 Figs. 3(b)와 4(b)의 비교로 확인할 수 있다.
 ).
).
 ).
).Figs. 5와 6은 원거리로 추정한 방위와 고각의 오차가 거리 추정에 미치는 영향을 나타내었다. 실험조건은 
 , SNR이 각각 0 dB, 20 dB에서 100회 평균하였으며 추정 오차는
, SNR이 각각 0 dB, 20 dB에서 100회 평균하였으며 추정 오차는  값으로 정규화 되었다. 그림에서
값으로 정규화 되었다. 그림에서  축과
축과  축은 거리 추정에 사용된 방위와 고각 추정치를 의미한다. Figs. 3과 4의 해당 SNR에서 방위와 고각 오차 범위를 고려해보면 거리 추정 오차는 방위의 오차에 따라 크게 변화하지 않으며 특히 고각의 변화에 둔감한 것을 확인할 수 있다.
축은 거리 추정에 사용된 방위와 고각 추정치를 의미한다. Figs. 3과 4의 해당 SNR에서 방위와 고각 오차 범위를 고려해보면 거리 추정 오차는 방위의 오차에 따라 크게 변화하지 않으며 특히 고각의 변화에 둔감한 것을 확인할 수 있다.
 Fig. 5. Range estimation error according to azimuth and elevation change ( |
 |
Fig. 6. Range estimation error according to azimuth and elevation change ( |
 ).
). ).
).마지막으로 실제 연산량 비교를 위해 Matlab 시뮬레이션을 이용하였다. 모의실험에서 MUSIC 기법의 경우 탐색 구간에 따라 연산량이 크게 달라지지만 제안한 기법과의 비교를 위해 임의로 
 설정하였다. 이때
설정하였다. 이때  ,
,  ,
,  은 방위, 고각, 거리의 탐색 횟수이다. 모의실험은 i7 3.40GHz PC에서 Matlab 명령 ‘tic’과 ‘toc’으로 500회 평균하여 수행하였다. 실험 결과 제안기법은 3.3376e-04 s의 시간이 소요되어 24.8191 s의 시간이 소요된 MUSIC기법에 비해 매우 적은 연산시간을 필요로 하였다. MUSIC 기법이 더 많은 탐색을 할 경우 연산 시간의 차이는 탐색 횟수에 비례하여 커진다.
은 방위, 고각, 거리의 탐색 횟수이다. 모의실험은 i7 3.40GHz PC에서 Matlab 명령 ‘tic’과 ‘toc’으로 500회 평균하여 수행하였다. 실험 결과 제안기법은 3.3376e-04 s의 시간이 소요되어 24.8191 s의 시간이 소요된 MUSIC기법에 비해 매우 적은 연산시간을 필요로 하였다. MUSIC 기법이 더 많은 탐색을 할 경우 연산 시간의 차이는 탐색 횟수에 비례하여 커진다.
