

I. 서 론
II. 이 론
III. 실 험
3.1 실험 장치와 데이터 획득
3.2 낮은 발생 빈도에서 수동 공동 영상의 계산
3.3 낮은 발생 빈도를 가지는 각각의 수동 공동 영상의 중첩
3.4 낮은 발생밀도를 가지는 각각의 RF 데이터를 중첩하여 수동공동 영상 계산
3.5 중첩된 RF데이터에서 영역분할방법으로 수동공동 계산
IV. 토의와 결론
I. 서 론
고출력의 초음파를 송신하여 인체 내부에 충격파를 만들면 관성 캐비테이션이 발생하여 연조직을 파괴시킨다. 이러한 원리를 이용하여 파쇄초음파치료(Histotripsy) 혹은 결석쇄석술(Lithotripsy) 등의 방법으로 암 조직 혹은 결석의 파괴에 이용되고 있다. 고출력의 초음파를 송신하여 공동의 발생 밀도를 높이면 치료 시간을 줄일 수 있다. 그러나 안전하고 효과적인 치료를 위해서 공동의 발생을 모니터링하기 위한 연구가 필요하다.
기포가 붕괴하면 초음파가 발생하므로 초음파의 주파수 특성, 신호의 세기 등을 분석하여 공동의 발생을 모니터링 할 수 있다. 그러나 인체 병변 조직의 파괴 등의 치료에 적용하는 경우, 공동의 발생 분포에 대하여 높은 공간해상도를 가지는 모니터링 방법이 필요하다. 파쇄초음파치료에서는 고출력의 초음파를 송신하여 충격파를 발생시킨 후에, 공동 붕괴에 의하여 발생하는 초음파 신호를 수동으로 수신하여 공동 영상을 만든다. 공간해상도를 얻기 위해서는 송수신 소자와 영상점 사이의 거리에서 초음파의 진행시간을 계산하여 송신과 수신집속을 한다. 그러나 수동 수신의 경우 송신집속을 할 수 없고, 공동의 발생 시간을 알 수 없으므로 수신된 공동 신호에 대하여 정확한 진행시간을 알 수 없다. 따라서 정확한 수신 집속을 할 수 없어서 공동영상의 공간해상도가 낮다. Norton et al.[1] 등은 수동으로 수신된 전체 시간의 데이터에 대하여 수신 집속을 한 뒤에 시간 적분하여 영상 영역에서 공동의 에너지를 계산하여 영상화 하였다. 이러한 방법은 큰 부엽의 발생과 더불어 낮은 공간 해상도를 가지는 단점이 있으므로, 부엽을 억제하기 위한 신호처리 방법이 연구되었다. 초음파 의료 영상에서 해상도 향상을 위하여 적용되었던 minimum variance beamforming과 phase coherence factor 등을 이용한 부엽 억제 방법이 적용되었지만 부엽을 완전히 제거하지 못하는 한계가 있었다.[2,3,4] 주기적인 짧은 시간 간격으로 한 지점에 집속 송신하여 충격파를 발생시키고, 송신 시간에 동기하여 집속점에서 신호가 수신소자에 도착하는 짧은 시간 구간만 수신하여 송수신 집속을 작은 영상 영역에 적용하여 공간해상도를 얻는 방법들이 소개되었다.[5,6] 이러한 방법도 공동의 위치와 발생 시간을 정확히 알 수 없기 때문에 집속에 필요한 신호의 진행시간을 근사적으로 계산하며, 공동 발생 이후의 긴 시간 동안 공동의 변화를 추적할 수 없다. 기존에 소개된 방법들 모두 지연-합(delay-and-sum) 집속 방법을 사용하지만 대부분의 방법이 집속된 신호를 모든 데이터 획득 시간 동안 시간 적분함으로써 넓은 영상 영역에서 부엽이 크게 발생하여 대조도와 공간해상도를 떨어뜨린다. 이러한 방법은 발생하는 공동의 갯수가 적고 각각의 공동 영상에서 나타나는 부엽이 서로 중첩되지 않아서 영상에서 공동의 구별이 용이한 경우에 적용하였다.
수동으로 수신한 RF 데이터에 지연-합 방법을 적용하여 수신 집속을 할 때 시간 축으로 짧은 시간 구간의 데이터 윈도우를 적용하여 수신 집속을 함으로써 공동 발생 시간을 구할 수 있는 방법이 소개되었다.[7,8] 이러한 방법은 공동의 발생 시간을 검출하고 공간해상도를 향상시키는 장점이 있다. 그러나 공동의 발생 빈도가 높은 경우, 많은 계산량 때문에 실시간 모니터링의 어려움이 있다. Jeong and Choi[8]은 수신 집속 과정에서 짧은 시간 구간의 데이터 윈도우를 적용하여 집속하고, 각 시간마다 집속된 영상의 최대 밝기 값을 검출함으로써 공동의 발생 시간과 위치를 정확하게 검출하는 방법을 제안하였다. 이는 공동 신호에 정확한 수신 집속 시간을 적용하여 집속하면 매우 큰 신호가 나타나므로, 데이터 윈도우를 이동시키면서 집속된 시계열 영상을 이용하여 시간-영상의 3차원 배열의 수동공동 영상을 만들고 국부적 최댓값을 검출하여 공동을 영상화하였다. 이 방법은 공동의 위치와 크기만 검출하므로 부엽의 영향을 받지 않고 영상화 할 수 있었다. 이러한 방법은 많은 계산량이 필요하므로, 계산량을 줄이기 위하여 시계열의 영상에서 각 영상마다 픽셀의 최댓값을 검출하여 최댓값의 시간 변화로부터 공동을 검출하였다.[9] 이 방법은 수동 공동 영상에서 밝기의 최대치를 가지는 화소를 검출하므로 여러 개의 공동이 동시에 혹은 가까운 시간에 발생하면 최대 신호 크기를 가지는 하나의 공동만을 검출하는 문제점이 있다. 이를 개선하기 위하여 개선된 Slanted Time Delay Focusing(STDF) 방법을 적용하여 시간축에서 부엽을 억제함으로써 검출 성능을 높였다. 이 방법은 낮은 발생 조건에서는 개별의 공동을 각각 영상화할 수 있는 공간해상도를 얻을 수 있지만 공동의 발생 빈도가 높은 경우 아직 검증되지 않았다.
이 논문은 STDF 를 적용하여 공동의 발생 빈도가 높은 경우에 공동의 영상화 가능성을 실험 데이터를 이용하여 컴퓨터 시뮬레이션으로 확인하였다. 같은 시간에 발생하는 여러 개의 공동을 검출할 수 있도록 하기 위하여 영상 영역을 여러 개로 분할하여 각 부영역에서 최댓값을 검출하였다. 실험으로 검증하기 위하여, 낮은 발생 빈도를 가지는 충격파 발생 조건에서 20 세트의 수동 공동 RF 데이터를 얻었다. 이 데이터에 STDF 방법을 이용하여 개별의 공동을 검출하였다. 20세트의 RF 데이터를 중첩하면 높은 공동 발생 빈도를 가지는 RF 데이터를 모사할 수 있다. 따라서 낮은 발생 빈도에서 검출한 공동 분포와 높은 발생 빈도를 가지는 데이터에서 검출한 공동의 분포를 비교함으로써, 높은 발생 빈도의 조건에서도 효과적으로 공동의 발생 분포를 영상화 할 수 있음을 실험에서 확인하였다.
II. 이 론
파쇄초음파치료에서 초점 위치에 충격파를 발생시키면 공동이 발생한다. Fig. 1은 데이터 획득 방법에 대한 설명이며, 공동을 발생시키고자 하는 지점에 =0 시간에 초음파를 집속하여 송신하여 충격파를 발생시킨다. 충격파에 의하여 발생한 기포가 붕괴될 때 발생하는 초음파 신호를, 어레이 수신 소자를 이용하여 수동으로 수신한 뒤에 메모리에 저장한다. 수동 수신 데이터에서 짧은 시간 구간의 집속데이터 윈도우 안의 데이터를 이용하여 수신 집속을 하여 한 장의 수동 공동 영상을 계산한다. 데이터 윈도우는 시간축에서 이동하여 각 시간마다 영상을 합성하므로 특정 시간에 합성한 영상에서 공동이 검출되면 공동의 발생 시간을 알 수 있다.[8,9]
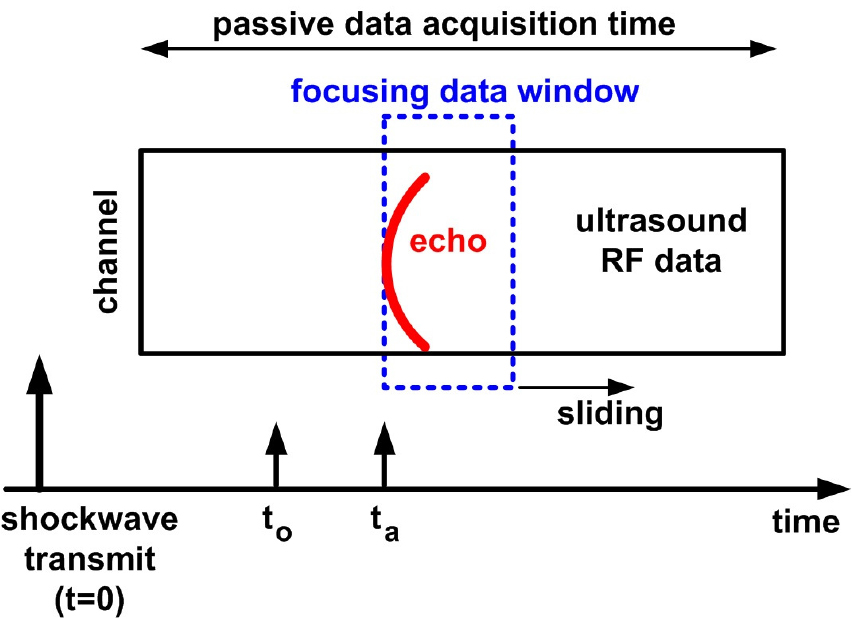
Fig. 1에서 공동의 발생 시간을 라 가정하고, 초음파 B-mode 영상법과 같은 개념으로 수신 집속 시간을 인가하여 영상을 계산하자. 영상점에서 발생한 초음파 신호가 수신 소자에 도착할 때 검출하기 위하여 번째 수신소자의 데이터에 적용하는 수신 집속 시간 을 다음과 같이 계산한다.
여기서 는 영상점, 는 번째 수신소자의 위치, 는 음속이다. Eq. (1)에서 영상점에서 깊이에 의한 신호의 전달시간 을 보상하면 영상점에서 발생한 신호가 시간에 수신소자에 도착한 신호에 대하여 영상을 구성하게 된다. 이 때 를 시작점으로 하여 최대 영상 깊이까지 수신 집속할 수 있는 RF 데이터의 시간 길이의 폭을 집속 데이터 윈도우라고 하자. 집속된 신호를 이용하여 시간에 합성한 영상은 다음과 같다.
공동 신호가 시간에 수신 소자에 도착하면 시간에 집속하여 검출된 공동 신호는 가장 큰 값을 가진다.
Fig. 1에서 집속 데이터 윈도우를 이동시키면서 모든 시간에 수동 공동 영상을 계산할 때, 검출 시간 에서 멀어진 데이터에서 수신 집속 시간에 오차가 발생하므로 검출된 공동 신호의 크기는 줄어든다.
데이터 윈도우를 이동시키면서 모든 시간에 수동 공동 영상을 합성하면 시계열 영상에서 가장 큰 공동 신호가 나타날 때 데이터 윈도우의 시작점이 공동의 검출시간이 되며, 시계열 영상을 배열로 정리하여 시간-영상의 3차원 배열 데이터를 구성할 수 있다. Jeong et al.[8]은 시간-영상의 3차원 배열 공간에서 국부적 최댓값을 찾아서 공동을 검출하였다. 공동이 시간에 검출이 되면 영상에서 깊이 를 계산하여 발생 시간 을 계산할 수 있다. 이 방법은 공동 신호의 크기와 발생 시간, 발생 위치를 구할 수 있지만 계산량이 많이 필요한 단점이 있다. 계산량을 줄이기 위하여 공동의 발생 빈도가 낮을 경우, 계산량을 줄이기 위하여 시계열 수동 공동영상에서 각 시간의 영상마다 최댓값을 구하고 이 값의 시간 변화를 관찰하여 국부적 최댓값을 찾음으로써 공동을 검출하였다.[9] 이 방법은 계산량을 줄이지만, 공동의 발생 빈도가 높아서 여러 개의 공동이 가까운 시간에 발생하면 가장 큰 신호만 검출하는 단점이 있다.
III. 실 험
3.1 실험 장치와 데이터 획득
낮은 발생 빈도를 가지는 수동 공동 영상을 계산하기 위하여 수조 실험에서 RF 데이터를 획득하였다. Fig. 2는 실험 장치의 구성이다. 상업용으로 쓰이는 충격파 치료장비(Cenowave, HnT Medical, Rep. Korea)를 이용하여 초점(F)에 집속이 되도록 하여 충격파를 발생시켰다. 충격파 발생기에 인가하는 전압은 18.7 kV이며, 수조에는 상온에서 기포를 제거한 물을 채워서 실험을 하였다. 신호발생기에서 동기 신호를 발생 시키고, 충격파가 송신되면, 초음파 의료용 영상진단기(ECUBE12R, Alpinion, Rep. Korea)를 이용하여 수동으로 RF 데이터를 획득하였다. 충격파 트랜스듀서의 초점(F) 영역에 수직으로 데이터 획득용 선형 트랜스듀서를 배치하였다. 충격파 발생용 트랜스듀스의 초점 거리는 35 mm이며, 초점 거리에서 데이터 획득용 수신 어레이 사이의 거리는 52.5 mm이다. =0의 시간에 신호발생기에서 트리거 신호를 발생시키면 충격파 발생용 트랜스듀스에서 출발한 초음파 신호가 포물선형 반사경에서 반사되어 73 μs 근처에 초점에 도달하여 기포가 형성된다. 기포가 붕괴하면서 발생한 신호는 35 μs 이후에 수신 어레이에 도착하게 된다. 수신에 사용한 어레이 프루브는 직경이 38 mm 크기이며, 128 소자 중에서 하나씩 건너 띄어 64 채널만 사용하였다. 선형 어레이 트랜스듀서의 주파수 대역폭은 3 MHz ~ 12 MHz 이며, 40 MHz의 샘플링주파수로 64채널의 RF 데이터를 실시간으로 획득한 뒤에, PC로 전송한다. PC에서 Matlab을 이용하여 80 MHz로 보간한 뒤에 신호 처리를 하였다. 공동이 많이 발생하지 않는 실험 조건에서 20세트의 RF 데이터를 얻었다.[8]
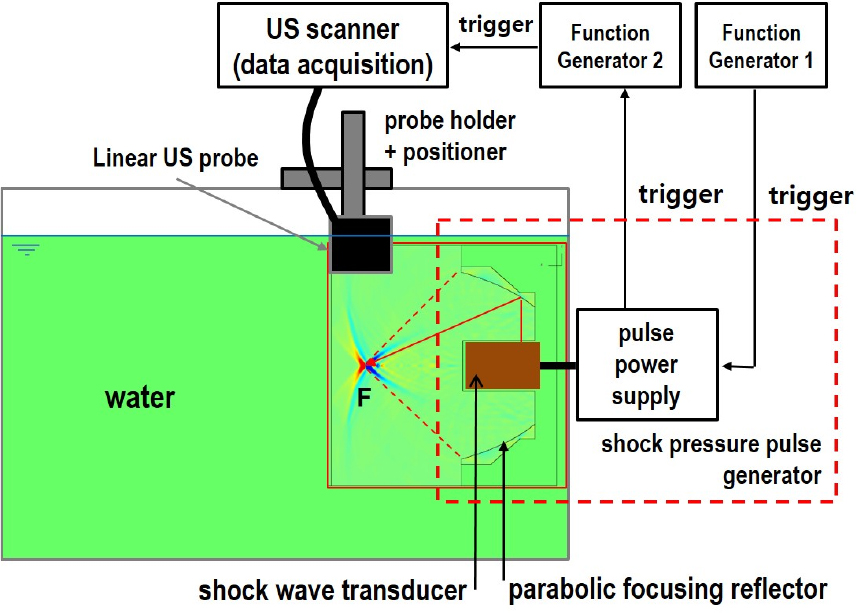
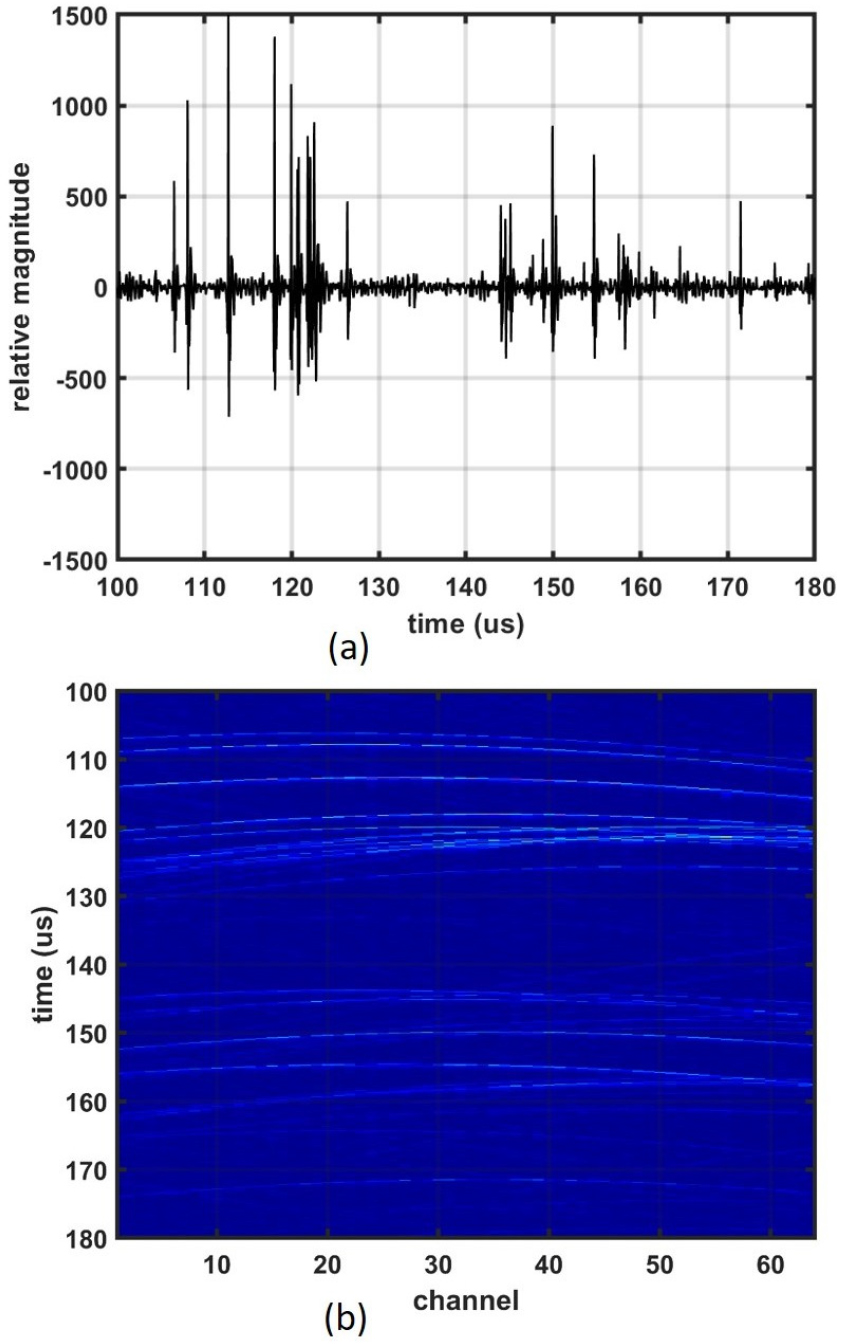
Fig. 3(a)은 수신소자의 가운데 위치의 채널에서 수신한 RF 데이터이며 100 μs ~ 200 μs 구간 에서 큰 신호들이 나타났다. Fig. 3(b)는 전체 64채널의 RF 데이터를 나타내었다. Fig. 3의 데이터에 STDF 방법을 적용하여 시계열 수동공동 영상을 얻었다. 신호가 크게 나타나는 100 μs ~ 200 μs 사이의 구간의 데이터를 사용하여 0.05 μs 시간 간격으로 집속 데이터 윈도우를 이동시키면서 영상을 계산하였다.
3.2 낮은 발생 빈도에서 수동 공동 영상의 계산
공동의 발생 빈도를 확인하기 위하여 수집한 20세트의 RF 데이터 중에 하나를 이용하여 수동공동영상을 계산하였다. 모든 시간의 시계열 수동공동 영상에서 각 영상마다 최댓값을 계산하고 최댓값의 시간 변화 그래프를 Fig. 4(a)에 나타내었다. 점선이 시계열 수동 공동 영상에서 최댓값의 변화 그래프이며, 최댓값 첨두치가 나타나는 시간을 검출하여 크기를 수직선으로 표시하였다. 그래프에서 최댓값의 검출은 MATLAB에서 findpeaks 함수를 사용하였다. 검출된 최대치는 39개이며, 최대치가 발생한 시간을 이용하여 해당 시간의 공동 영상에서 최댓값을 가지는 공동의 위치를 계산하였다. Fig. 4(b)가 검출된 공동의 위치와 신호 크기를 표시한 영상이다. 영상의 계산은 영상용 트랜스듀서에서 30 mm의 깊이에서부터 계산하여 충격파 초점 위치(깊이 52.5 mm)를 중심으로 40 mm × 40 mm의 영상 크기를 가진다. 신호의 상대 크기는 MATLAB의 JET 칼라맵을 이용하여, 신호가 클수록 적색으로 표현하였으며, 또한 신호가 클수록 큰 직경을 가지는 원으로 표현하였다. 따라서 공동 신호의 크기가 작으면 공동 영상에서 시각적으로 잘 구별되지 않는다.
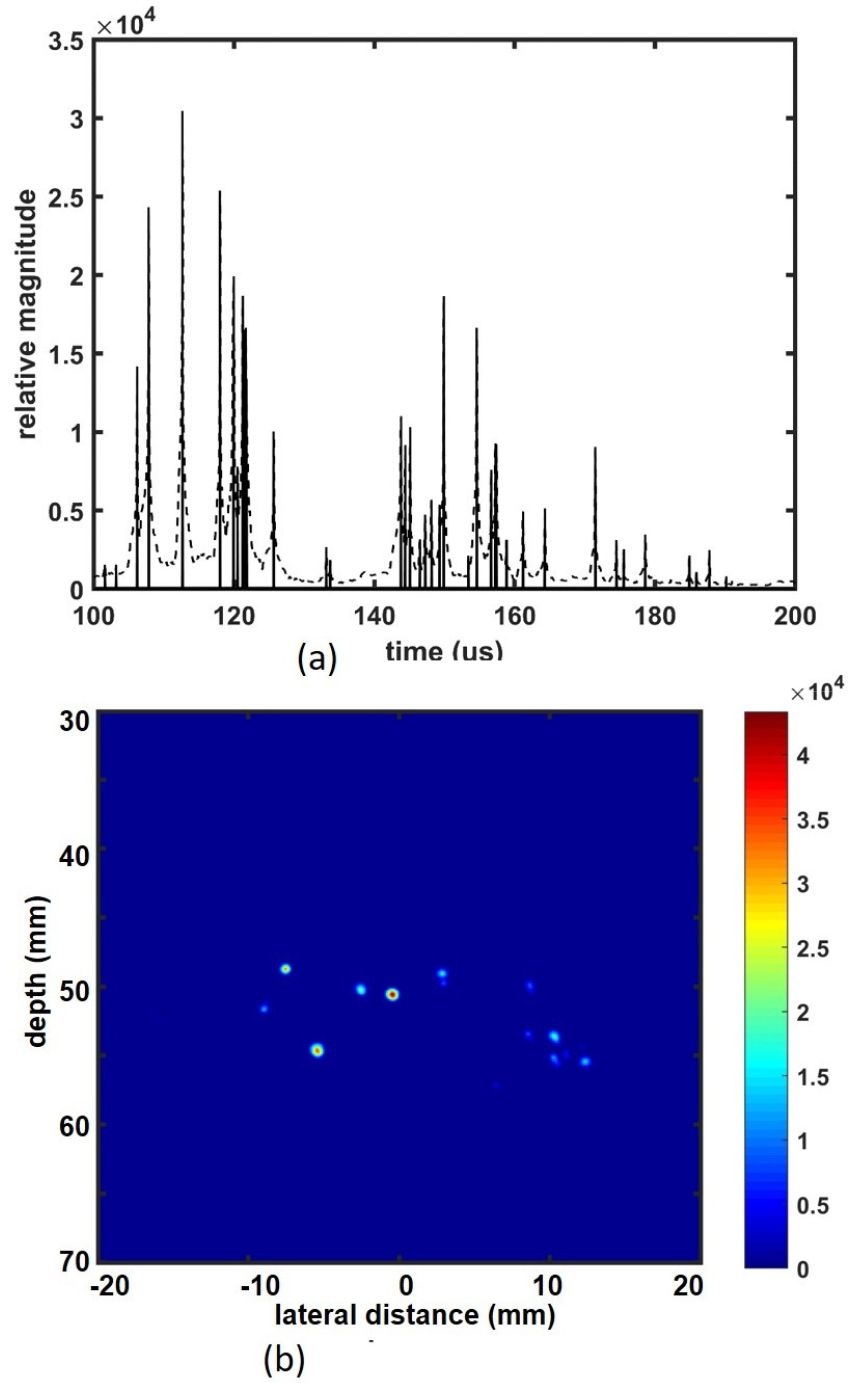
Fig. 4.
(Color available online) Calculation of passive cavitation μsing RF data obtained under experimental conditions with low occurrence frequency. (a) Detection of cavitation in the maximum value graph (dashed line) obtained by applying slanted time delay focusing, 39 peaks (solid line) were detected. (b) Synthetic passive cavitation image.
Fig. 4(a)에서 39개의 공동이 검출되었으나 Fig. 4(b)의 영상에서 작은 신호 크기의 공동은 시각적으로 색깔이 구별되지 않는다.
한 지점에서 발생한 공동 신호는 발생 위치에서 수신채널과의 거리가 멀수록 수신 채널에 늦게 도착하므로 Fig. 3(b)의 RF 데이터에서 원호의 모양으로 나타난다. 공동의 발생 빈도가 낮으므로 RF 채널 데이터에서 공동의 원호 모양의 RF 신호가 시각적으로 구별된다. Fig. 3(b)의 데이터에서 구별되는 원호의 개수와 Fig. 4의 영상에서 검출한 공동의 갯수가 비슷하게 나타났다. 공동 발생 밀도가 낮은 조건에서 데이터를 얻었으므로 각각의 공동은 서로 영향을 주지 않을 정도로 거리가 떨어져 있다. 따라서 낮은 발생 빈도를 가지는 경우 STDF 방법을 적용하여 대부분의 공동을 검출할 수 있음을 알 수 있다.
3.3 낮은 발생 빈도를 가지는 각각의 수동 공동 영상의 중첩
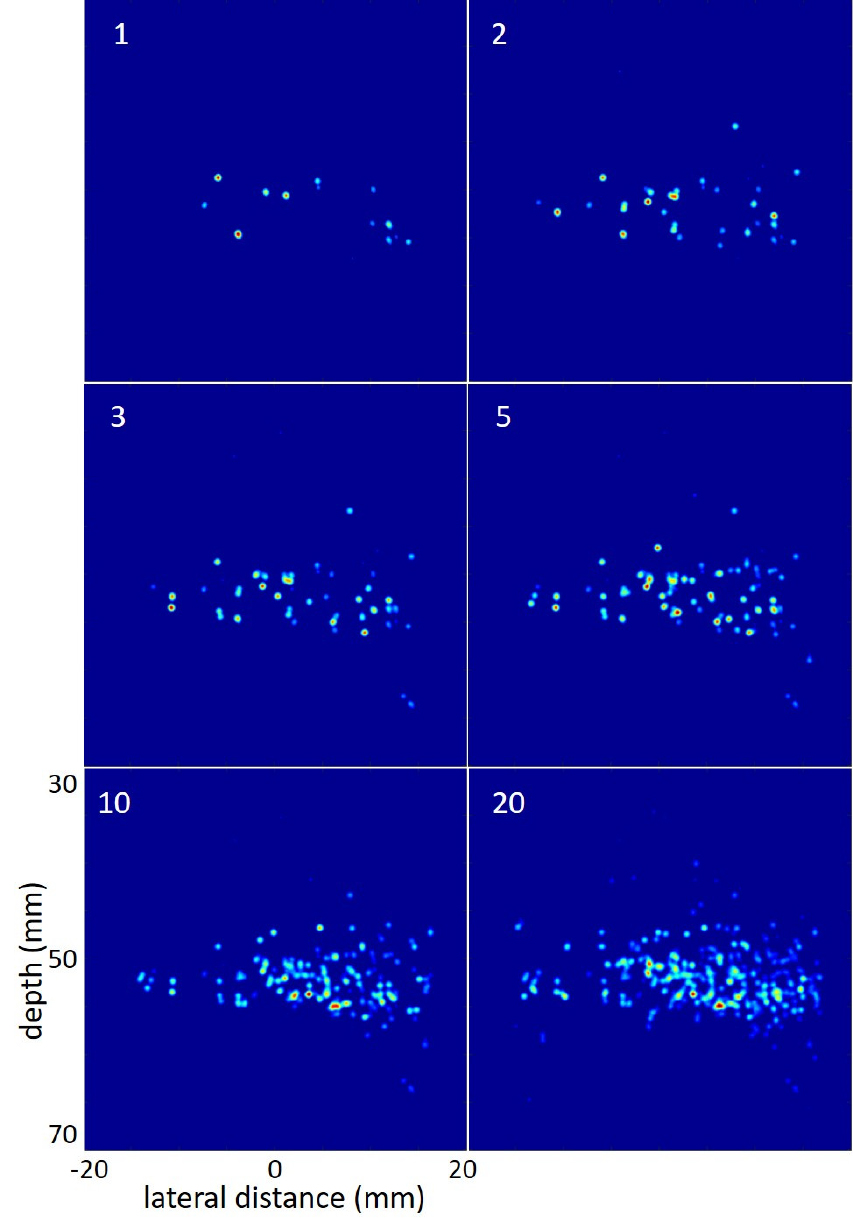
20 세트의 RF 데이터에서 각각 수동 공동을 계산하고 공동의 위치, 신호의 크기와 발생 시간을 모두 확인하였다. 각 영상마다 30개 ~ 50개 정도의 공동을 검출하였다. 충격파 발생기의 인가 전압을 올리면 충격파의 음향출력이 커지므로 발생하는 공동의 갯수는 증가한다. 공동이 많이 발생한 경우를 모사하기 위하여, 각각 독립적으로 계산한 20개의 수동공동영상을 중첩하여 하나의 합성 영상을 얻었다. Fig. 5는 각각 계산한 수동 공동 영상을 겹치는 개수를 다르게 하여 합성한 영상이며, 겹친 영상의 갯수는 그림에 숫자로 표시하였다. 20장이 겹쳐진 영상에서 공동의 전체 갯수는 899개이며 모든 공동 신호의 크기와 위치와 발생시간을 알고 있다. 공동의 분포 영역은 고출력의 충격파를 사용한 경우의 광학사진과 유사하게 나타났다.[10,11] 따라서 이 영상을 공동 검출 성능을 비교하기 위한 표준 영상으로 사용하자.
3.4 낮은 발생밀도를 가지는 각각의 RF 데이터를 중첩하여 수동공동 영상 계산
고출력의 충격파를 사용한 실험조건에서 얻은 RF 데이터를 모사하기 위하여 20세트의 RF 데이터를 모두 더하여 중첩하였다.
Fig. 6(a)는 64 채널 중에서 가운데 채널의 RF 데이터의 파형이며, Fig. 6(b)는 64채널 전체의 RF 데이터다. 높은 공동 발생 밀도를 가지므로 원호 모양으로 나타나는 개별의 RF 신호를 분리하여 구별하기 어렵다. Fig. 7은 합성한 RF 데이터에 STDF 방법을 적용하여 검출한 공동의 신호 크기와 검출 시간을 표시한 그래프이며 258개의 공동을 검출하였다.
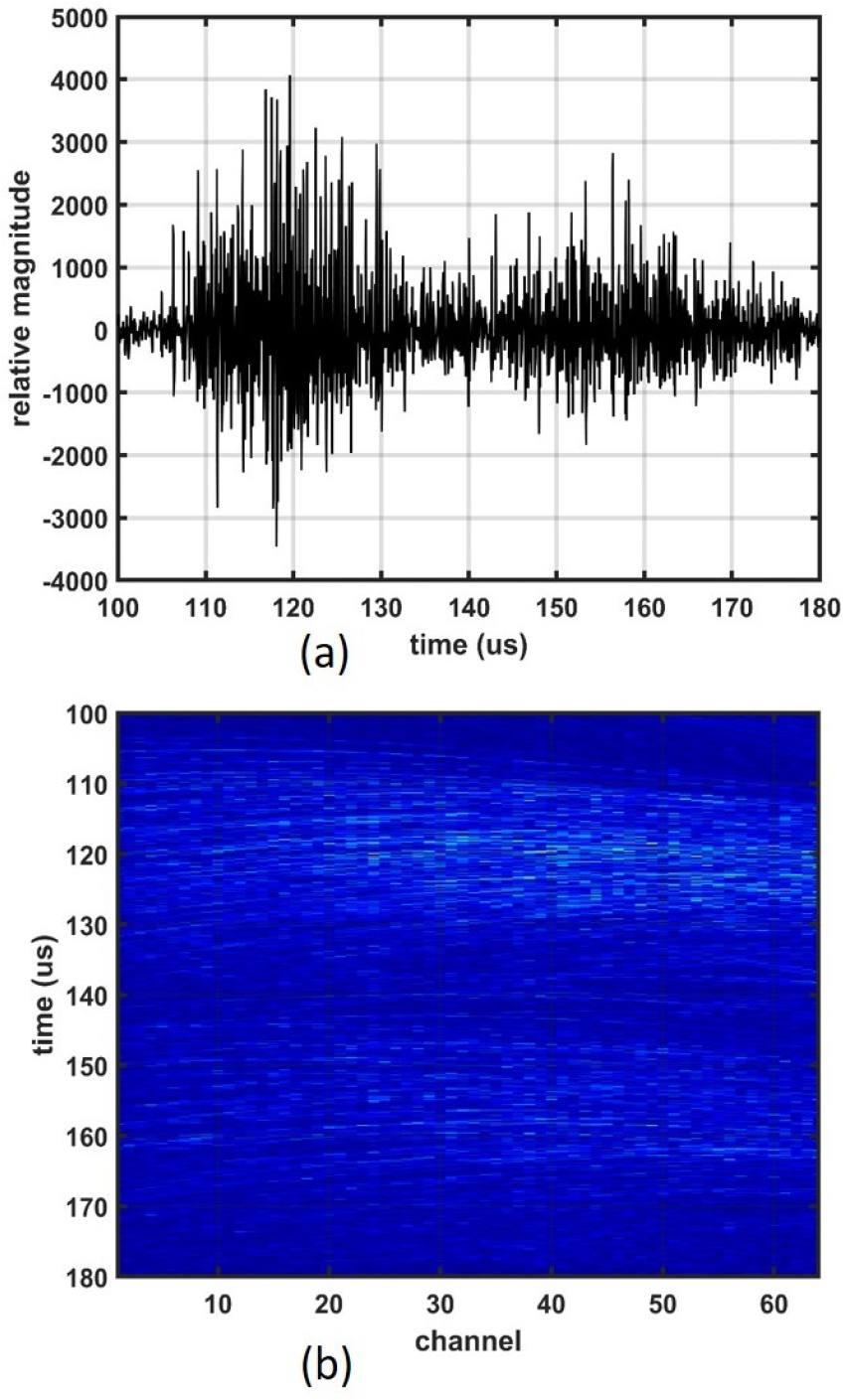
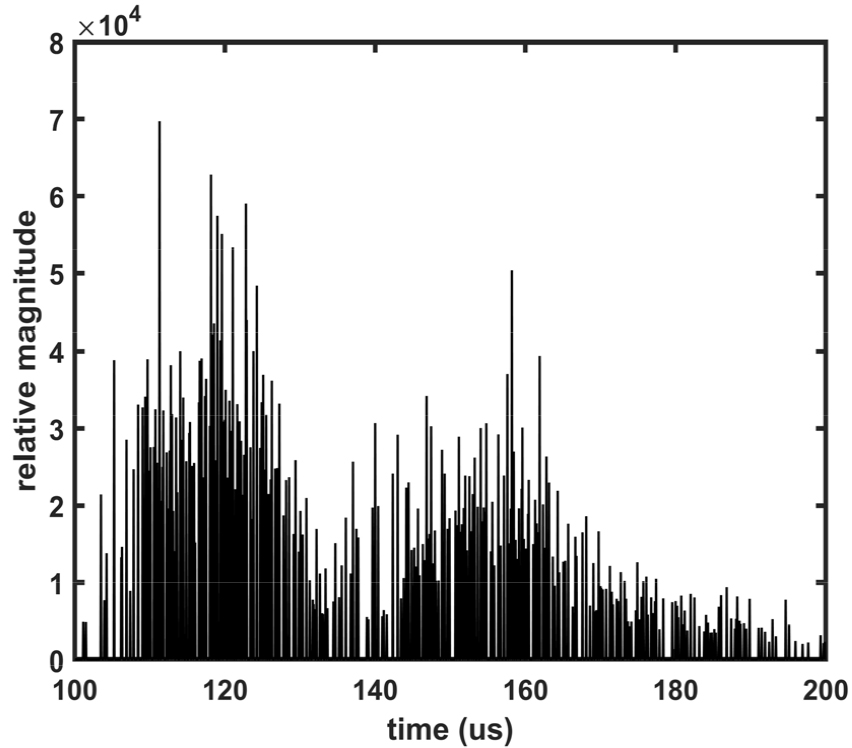
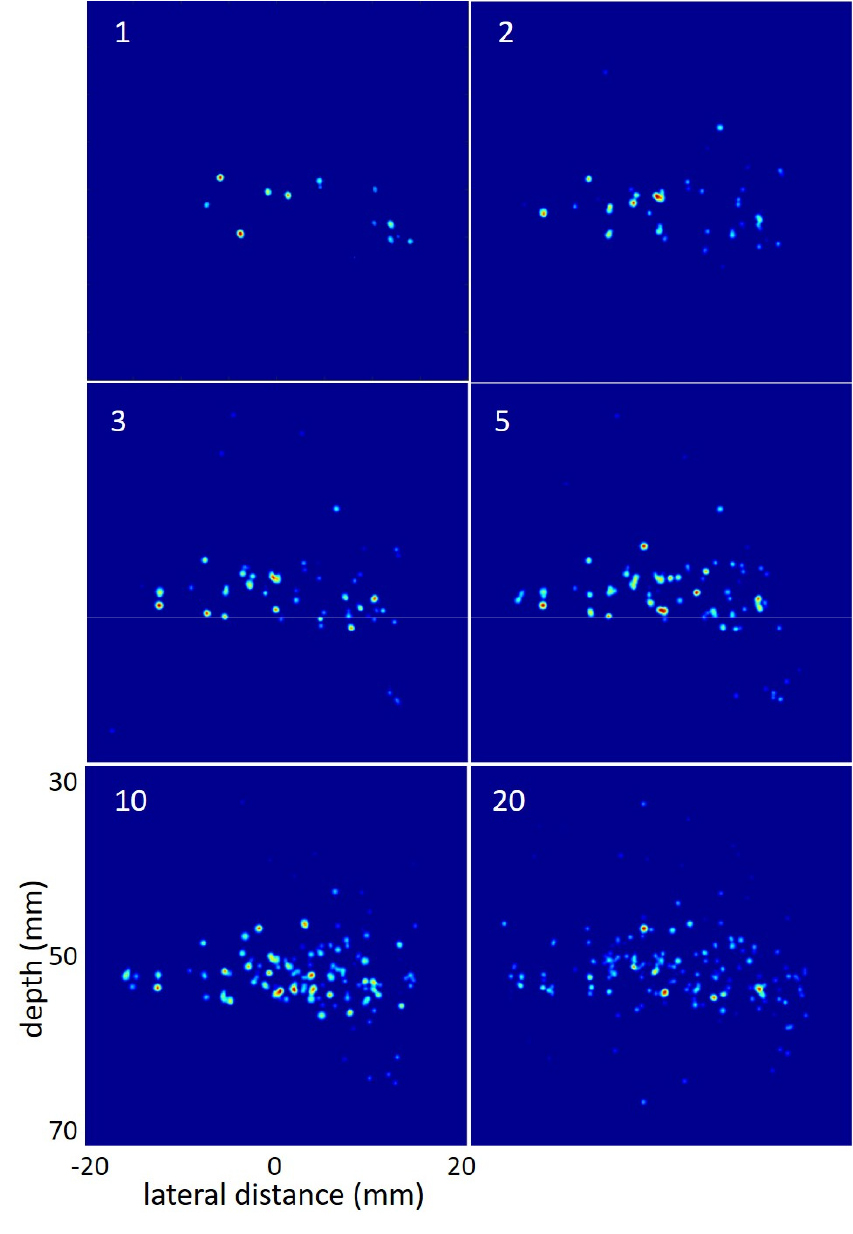
Fig. 8은 겹치는 RF 데이터의 갯수를 다르게 하여 합성한 RF 데이터에서 검출한 공동의 신호 크기와 위치를 표시한 수동공동영상이다. Fig. 5의 표준 영상과 비교하면, 겹치는 RF 데이터의 갯수가 적으면 검출된 공동들의 분포 패턴이 Fig. 5의 표준 영상과 비슷하게 나타난다. 그러나 합성에 사용한 RF 데이터의 갯수가 증가해도, Fig. 8에서 검출되는 공동의 갯수가 비례하여 증가하지 않는다(Fig. 10 그래프 참조). 따라서 공동 발생 빈도가 높은 경우에 공동들의 발생 시간이 가까우면 신호들이 가까이 중첩되어서 수신 집속의 성능이 떨어짐을 알 수 있다. 그러나 검출 오류가 증가함에도 불구하고 Fig. 5와 비교하여 공동이 검출되는 영역의 분포는 비슷한 것을 알 수 있다.
3.5 중첩된 RF데이터에서 영역분할방법으로 수동공동 계산
집속데이터 윈도우를 이동시키면서 수신 집속을 하면 하나의 공동 신호는 긴 시간에 걸쳐서 신호가 나타난다. 따라서 정확한 공동 신호를 검출하기 위해서는 많은 계산이 필요하다. 계산량을 줄이기 위하여, 시계열 수동공동 영상을 계산하고 한 시점의 수동공동영상에서 하나의 최댓값을 검출하여 공동을 검출하였다.[9] 이런 방법은 동시에 여러 개의 공동이 발생하면 가장 큰 값을 가지는 하나만 검출하는 문제점이 있다. 따라서 공동의 발생 빈도가 높은 경우 사용할 수 없다. 이를 극복하기 위하여 수동공동 계산 영역을 작은 영역으로 분할하여 부영역으로 나누고 부영역 마다 최댓값을 각각 계산함으로써, 다른 부영역에서 같은 시간에 발생하는 공동을 검출할 수 있도록 하여 검출 빈도를 높였다. 이 논문에서는 합성한 RF 데이터에 대하여 STDF을 적용한 뒤에 전체 영상 영역을 2행, 8열로 분할하여 16개의 같은 크기의 직사각형의 부영역으로 나누고, 각 영역에서 최댓값의 시간 변화를 계산하였다.
Fig. 9는 16개의 부영역에서 각각 공동을 검출하여 전체를 합성하여 하나의 영상으로 만든 수동공동 영상이다. Fig. 9에서 20개의 RF 데이터를 겹친 경우 검출된 공동의 갯수는 모두 766개이다. 각 영역마다 국부최대치를 각각 검출하므로, 작은 신호의 검출 가능성이 증가하여 초점 영역의 바깥에서도 작은 신호의 공동이 나타난다. 이는 초점 영역에서 발생한 공동들에서 발생한 신호의 부엽들이 초점 영역에서 벗어난 곳에서 중첩되어 신호가 커지는 경우에 잘못 검출되는 것으로 판단된다.
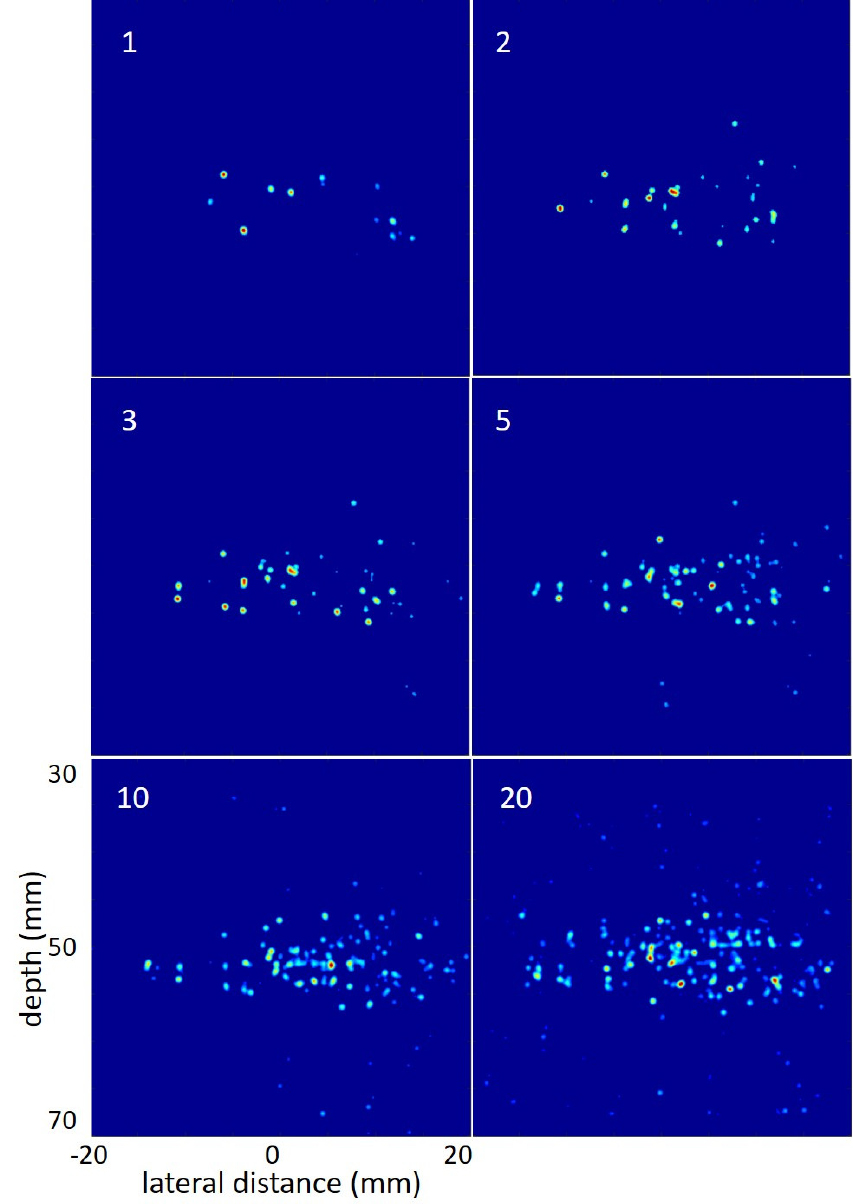
Fig. 10은 3가지의 시뮬레이션의 조건(낮은 발생 빈도를 가지는 각각의 수동 공동 영상의 중첩, 각각의 수동 공동 RF 데이터를 중첩하여 수동공동 영상 계산, 중첩된 RF데이터에서 영역분할방법으로 수동공동 계산) 에서 겹친 데이터의 갯수와 검출한 공동의 갯수를 그래프로 비교하였다. 단점선은 낮은 발생 밀도를 가지는 각각의 수동공동영상을 겹쳐서 만든 영상(표준영상)에서 공동의 갯수이며, 검출 갯수의 비교 기준이 된다. 겹치는 영상의 갯수와 공동의 갯수는 비례한다. 실선은 겹쳐진 RF 데이터에서 합성한 수동공동영상에서 검출한 갯수이며, 공동의 발생 밀도가 높아지면 검출 갯수가 포화되어 검출에 한계가 있음을 알 수 있다. 장점선은 RF 데이터를 겹친 경우에 영역분할 방법을 적용한 결과이다. 중첩하는 RF 데이터의 개수가 증가하더라도 검출 갯수가 포화되지 않고 증가한다.
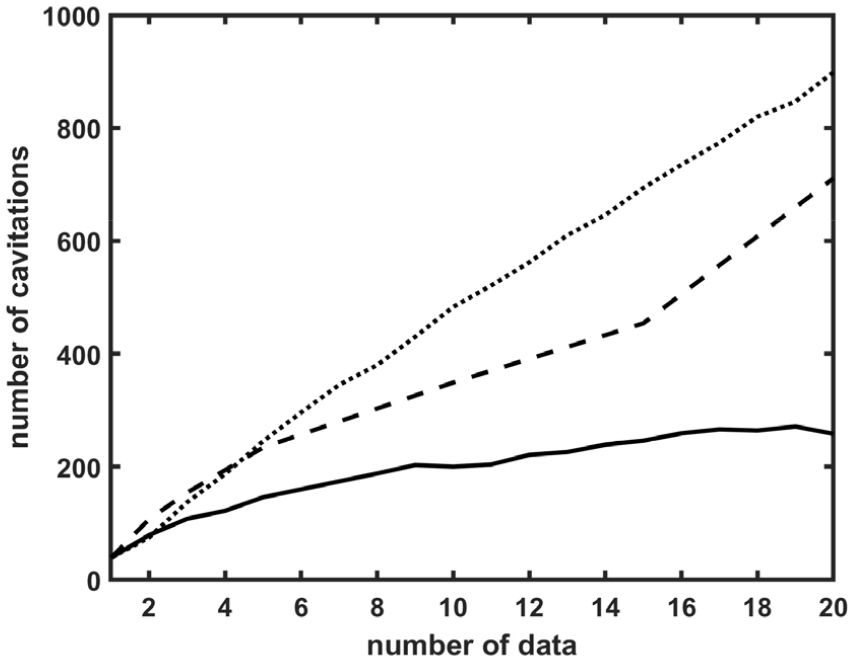
Fig. 10.
Number of cavitation detected according to the number of overlapping data. The dotted line is the number detected and added from each RF data, the dashed line is the number detected by applying the region segmentation method to the overlapping RF data, and the solid line is the number detected from the overlapping RF data.
IV. 토의와 결론
STDF 방법에서 공동 검출 방법은 집속된 신호 크기의 시간 변화를 관찰하여 정확히 집속되는 시간에 영상점에 최댓값이 나타나는 특성을 이용하여 검출한다. 계산량을 줄이기 위하여 시계열 영상에서 한 시점의 수동공동영상에서 한 개의 최댓값을 검출하는 방법은 동시에 여러 개의 공동이 발생하면 검출할 수 없다. 시계열 영상을 계산하기 위하여 사용한 RF 데이터의 전체 시간 구간 길이는 100 μs 이며, 한 개의 공동을 검출할 때 공동 신호의 주엽의 시간축에서 Full-Width-Half-Maximum은 0.35 μs 정도 되므로, 실험에 사용한 데이터의 시간 길이 100 μs 구간에서 발생 시간이 겹치지 않는 공동을 가정하면 최대 100 μs / 0.35 μs = 285개 정도를 검출할 수 있다. Fig. 7에서 258개를 검출했으므로 단일 영상에서 최댓값 검출방법은 공동을 최대한까지 검출하였음을 알 수 있다. 영역 분할 최댓값 검출 방법은 같은 시간에 각각의 부영역에서 발생하는 공동을 각각 검출할 수 있으므로 공동의 발생 밀도가 높더라도 검출 확률을 높여준다. 20개의 데이터를 겹친 경우, 표준 영상에서 검출된 전체의 공동의 갯수가 899개이며, 영역분할 방법으로 검출한 공동의 갯수가 766개이므로 85 % 정도 검출했음을 알 수 있다. 분할하는 영상 영역의 갯수를 증가시키면 작은 신호의 공동도 검출 가능하겠지만, 공동의 발생 밀도가 증가하면 부엽 신호들의 중첩에 의하여 나타나는 작은 신호를 검출할 가능성이 높아진다.
수동공동 영상에서 충격파가 입사되는 방향은 영상에서 50 mm 깊이 근처의 가로 방향이므로 검출하는 공동은 충격파 초점을 중심으로 가로 방향으로 길게 타원형 영역에 분포한다.[10,11] RF 데이터를 얻는 초음파 트랜스듀서의 방향은 영상에서 수직방향이다. 따라서 수신 집속 오차에 의하여 발생하는 부엽은 공동의 위치에서 수직방향으로 길게 나타난다.[2,3,4,12] 여러 개의 공동 신호가 있으면 길게 나타나는 각각의 부엽 신호들이 겹쳐서 초점 영역 밖에 큰 신호가 나타날 수 있고, 이 신호는 공동으로 잘못 검출 될 수 있다. Fig. 9에서 20개를 겹친 경우, 영상의 가운데 수평방향으로 길게 있는 초점 영역 바깥의 위와 아래에서 검출된 작은 신호의 공동들은 부엽 신호들의 중첩에 의하여 잘못 검출된 것이라고 생각된다. 충격파 발생 영역은 미리 알 수 있으므로 초점 영역 밖에서 검출되는 공동은 노이즈로 판단하여 영상 처리로 제거될 수 있다. 집속 영역 밖에서 나타나는 노이즈라고 판단되는 공동을 제거하면 Figs. 5, 8, 9에서 검출된 공동의 분포 영역이 비슷하게 나타나서, 공동의 발생 밀도가 높은 경우에도 공동의 분포 영상을 근사적으로 얻을 수 있음을 알 수 있다.
기존의 연구에서는 한 개의 공동의 발생과 파괴에 대한 특성이 충분히 연구되어 있다. 그러나 서로 인접한 거리에서 여러 개의 공동이 발생하면 인접하는 기포의 상호작용으로 단일 공동과는 다른 파괴 특성이 나타난다.[12.13.14.15.16] 고출력의 충격파를 이용하여 공동의 발생 밀도가 높아지면 치료 시간을 단축할 수 있다. 그러나 치료 영역의 매질의 특성에 따라서 공동의 발생 특성이 달라진다. 또한 발생한 기포의 거리가 가까워지면 발생 영역도 희박 조건과는 다른 패턴을 나타낸다. 그러나 공동이 발생하는 영역이 제한되어 있고 여기에서 발생하는 음장 특성이매우 복잡해도 수신집속 방법과 신호처리를 이용하여 충분히 영상화 할 수 있음을 알 수 있다.
본 연구에서는 공동의 발생 밀도가 높은 조건에서 공동을 검출하여 영상화 할 수 있는 가능성을 검토하였다. 발생 빈도가 낮은 경우 개별의 공동을 구별하여 검출할 수 있으나, 발생 빈도가 높아지면 검출 오차가 증가하더라도, 충격파 초점을 중심으로 타원형 형태의 영역에서 공동이 분포됨 확인할 수 있었다. 이러한 연구는 파쇄초음파치료에서 치료조건의 설정과 치료 영역을 정확히 제어하는데 도움을 줄 수 있을 것이다.
