I. 서 론
II. 상호 상관 기반 시간 지연 신호 추정 기법 요약
2.1 시간 지연 신호의 수치 모델링
2.2 GCC-PHAT 기반 시간 지연 추정 방법
III. 주파수 영역 자기 상관을 이용한 GCC-PHAT 개선
IV. 시뮬레이션
IV. 결 론
I. 서 론
두 개의 수신 신호 간의 시간 지연 추정은 소나 같은 수중 음향 신호처리 분야뿐만 아니라 여러 가지 통신 및 음성 처리 시스템 등에서 주요 신호원의 위치 파악을 위한 수단으로 사용하고 있다.[1-3] 그밖에 지능형 서비스 로봇 에서도 로봇이 공공장소나 가정에서 주위 상황을 인지하고 판단하여 주의집중을 수행할 수 있게 하기 위하여 시간 지연 추정 기술이 응용되고 있다.[4]
현재 음원 추적 기술은 시간영역 및 주파수영역에서 연구가 많이 진행되고 있다. 대표적으로 널리 사용되는 방법에는 강도 차이를 이용한 방법,[5] GCC-PHAT(Generalized Cross Correlation-Phase Transform)를 비롯한 TDOA(Time Difference of Arrival) 방법[6,7] 및 빔포밍 (beam-forming) 방법[8] 등이 있다. 신호 강도 차이를 비교하는 방법의 경우 비교적 신호 대 잡음비가 좋은 경우에 좋은 결과가 나오는 경향이 있고,[5] 빔포밍을 이용하는 경우는 정확한 추정을 위해서 매우 좁은 빔폭을 갖는 빔형성이 필요하여 사용하는 배열의 크기가 커야할 경우가 생긴다.[2] 반면에 TDOA을 이용한 방법은 필요 센서 수도 상대적으로 적고, 계산도 간단한데 비해서, 비교적 정확성이 좋아 가장 널리 쓰이고 있고 있다. 그중에서 GCC-PHAT은 상관도를 이용하는 TDOA중에서 잡음이나 반향환경에서 좋은 특성을 보이고 있다.[9]
본 논문에서는 GCC-PHAT보다 더 향상된 추정 성능을 갖는 수정된 알고리즘을 제안한다. 향상된 성능을 위해서 GCC-PHAT내부에서 주기성을 띠는 부분을 파악하고 이 주기성이 시간 지연과 밀접한 관계가 있음도 파악하였다. 그리고 그 주기성을 유지하면서 부가된 잡음을 줄이는 방법의 하나로 자기 상관을 취하도록 하였다. 그리고 시뮬레이션을 통해서 음원이 백색 신호원인 경우와 음원이 유색 신호원일 때 신호 대 잡음비를 달리하면서 시간 지연 추정 성능을 비교하였다.
II. 상호 상관 기반 시간 지연 신호 추정 기법 요약
2.1 시간 지연 신호의 수치 모델링
전통적인 시간지연추정 문제에 많이 쓰이는 간단한 신호 모델은 다음과 같다. 두 수신 채널에서 각각 수신된 신호를 xi(k), i = 1,2,라 한다면, 그 신호의 수치 모델은 다음과 같다.
| $$x_i\left(k\right)=\alpha_is\left(k-\tau_i\right)+n_i\left(k\right),$$ | (1) |
여기서 αi는 원 신호, s(k),가 i번째 채널에 도달할 때의 감쇠 계수이고, τi는 원 신호가 i번째 채널에 도달할 때까지의 전파시간이다. 또 ni(k)는 i번째 채널에 부가된 잡음이다. 이 모델에서 s(k), ni(k)는 영 평균이고, 상호상관이 없고, 시간에 따라 통계적 성질이 변하지 않는 가우시안 신호이다. 두 채널간의 상대적인 시간 지연은, 이다.
2.2 GCC-PHAT 기반 시간 지연 추정 방법
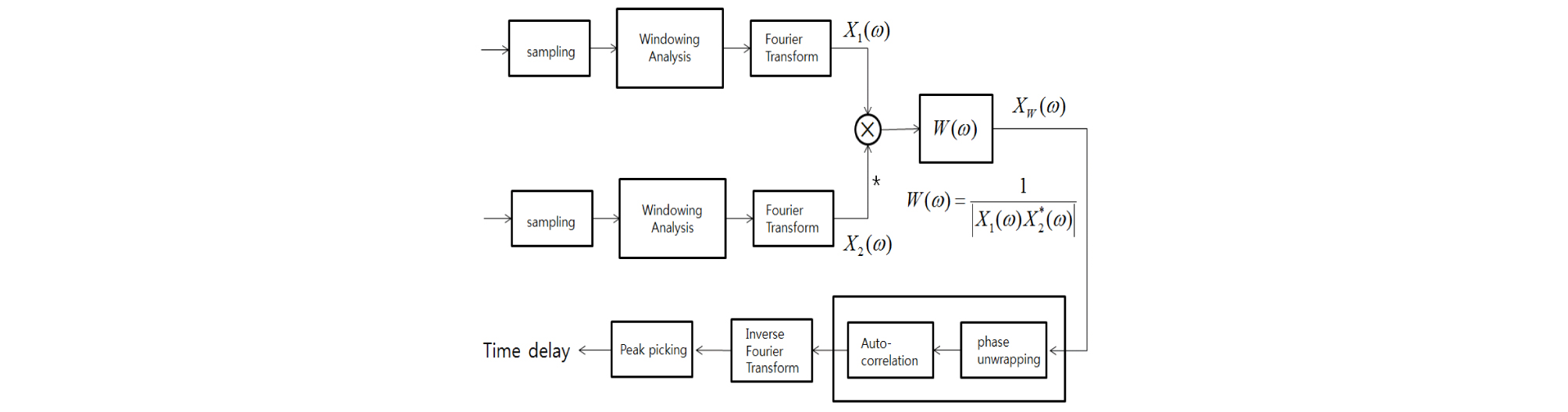
GCC-PHAT는 백색화 가중치를 사용하는 상호상관 방법이다. 주파수 영역에서 두 센서의 신호들의 상호 상관을 구한 후에 백색화 가중치를 곱하는 과정을 더하여 신호의 스펙트럼의 영향을 배제하는 효과를 갖는다. GCC-PHAT 기반의 시간 지연 추정 과정을 Fig. 1에 나타내었다.

Fig.1의 GCC-PHAT 방법을 간략히 기술하면 다음과 같다. 두 개의 마이크에서 받은 신호 x1(k)과 x2(k) 사이의 상호상관도는 다음 식에 의해 얻어진다.
| $${R_{X_1X_2}\left(\tau\right)=\frac1{2\pi}\int_{-\infty}^\infty W\left(\omega\right)X_1\left(\omega\right)X_2^\ast\left(\omega\right)e^{i\omega\tau},}$$ | (2) |
여기서 Xi(ω)는 xi(k) 를 주파수 변환한 신호이다. 또 W(ω)는 주파수축에서 구한 가중 함수로써 X1(ω)X*2(ω)의 역수에 해당한다.[7] 이 가중 함수를 PHAT(phase transform) 가중함수[8]이라고 부른다. PHAT은 시간지연을 추정함에 있어서 각 주파수의 상대적인 중요성을 결정하는 주파수에 종속된 가중치 된 함수이며, 식은 다음과 같이 표현된다.
| $${W\left(\omega\right)=\frac1{\left|X_1\left(\omega\right)X_2^\ast\left(\omega\right)\right|}\cdot\;}$$ | (3) |
위와 같은 가중치를 곱한 후에는 신호의 지연 정보가 들어 있는 위상만 남고 크기는 언제나 1로써 일정하게 유지된다. 일종의 백색화가 일어난다. 따라서 좀 더 충실한 시간 지연 정보 추정이 가능해진다. Eq. (2)를 통해서 구해진 Rx1x2(τ)를 통하여 두 센서 사이의 최종적인 지연 시간은 다음 식과 같이 구해질 수 있다.
| $${\widehat\tau=arg\;max\;R_{X_1X_2}\left(\tau\right).}$$ | (4) |
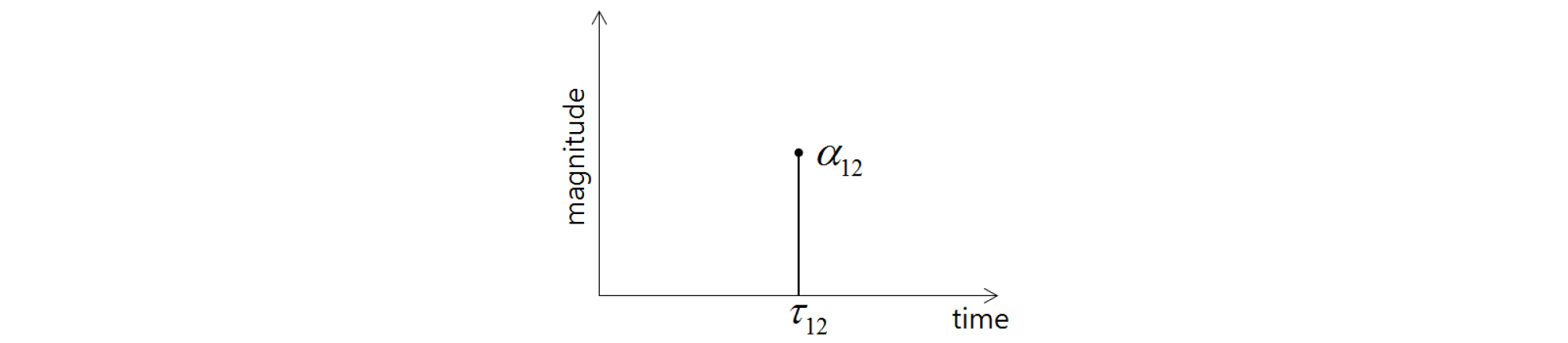
Fig. 2는 이상적인 경우에 상호 상관을 그림으로 나타낸다. 가로축의 τ12는 지연시간을 나타내며 세로축은 α12는 지연 시간에서의 Rx1x2(τ)의 값을 나타낸다. 센서 사이의 지연시간은 Rx1x2(τ)값이 최대를 나타내는 가로축의 값이다.
III. 주파수 영역 자기 상관을 이용한 GCC-PHAT 개선
Fig. 1에서 XW(ω) = W(ω)X1 (ω) X2*(ω) 라고 할 때 이 XW(ω)의 역 푸리에 변환으로부터 얻은 시간 지연 값이 Fig. 2와 같이 임펄스성 신호로 표현된다면 XW(ω)은 다음 식과 같음을 알 수 있다.
위 식을 주파수 축과 시간축의 의미를 바꿔서 재해석 해 본다면 f 영역에서 주파수 τ12인 주기 신호로 재해석할 수 있다. 이 경우 Fig. 2와 같은 결과는 Eq. (5)의 신호를 역푸리에 변환하여 얻는 결과 값으로 해석 할 수 있다. 그러므로 실제 신호를 다룰 때 XW(ω)에 잡음이 부가되는 경우를 생각해 볼 때 부가된 잡음이 주기성이 없는 백색잡음이라면 Fig. 3 하단에 추가된 작은 네모 안에서와 같이 XW(ω)의 자기 상관을 구함으로써 주기성을 살리면서 잡음의 영향은 줄일 수 있다.[10]
| $${R_{XX}\left(p\right)=\frac1N\sum_{\omega=0}^{N-1}X_W\left(\omega+p\right)X_W\left(\omega\right)^\ast,}$$ | (6) |
여기서 주파수(ω)가 N개의 샘플로 이루어져있다고 가정한다. 그리고 이때에 FFT(Fast Fourier Transform)를 써서 디지털 푸리에 변환하는 경우를 대비하여 위상을 unwrapping[10]하는 과정이 필요할 수 있다. 이런 추가된 자기 상관 이후에는 Fig. 3과 같이 일반 GCC-PHAT처럼 역 푸리에 변환을 취한다. 위에 언급한 두 과정을 더한 새로운 GCC-PHAT를 그림으로 나타내면 다음 그림과 같다. 그리고 이후 서술의 편이를 위해서 제안된 알고리즘을 AC-GCC-PHAT(Auto-correlation GCC-PHAT)라고 한다.
IV. 시뮬레이션
모의실험을 위해서 두 수신 채널을 위한 신호 열을 두 종류로 발생시킨다.
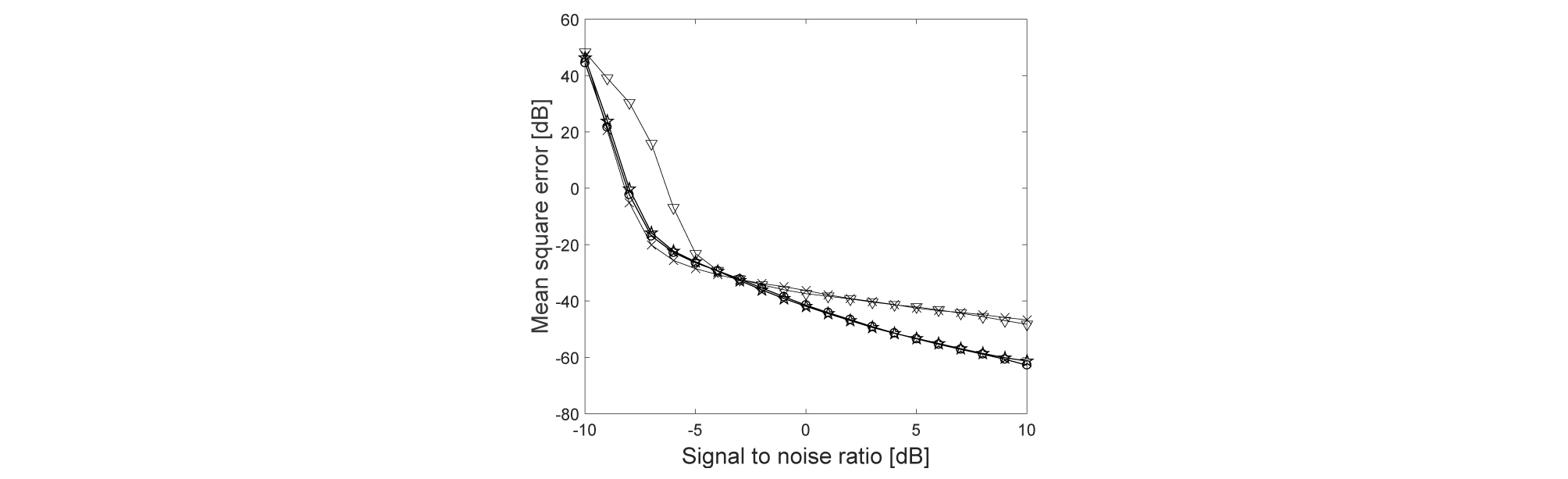
첫 번째 비교실험을 위한 신호발생을 위해서 첫 번째 채널 신호 x1(k)은 백색 가우시안 불규칙 신호로 발생 시켰다. 두 번째 채널 신호는 x1(k)과 10 샘플 뒤진 신호와 1 샘플 뒤진 신호로 모델 하였다. 즉, x2(k) = x1(k-10) 과 x2(k) = x1(k-1)이다. 각 신호 x1(k)과 x2(k)에는 두 백색 가우시안 잡음, n1(k)과 n2(k)가 각각 부가되었다. 이들 부가 잡음들은 서로 상관관계가 없도록 하였다. 그리고 신호 대 잡음비는 -10 dB부터 10 dB까지로 변화시켰다.
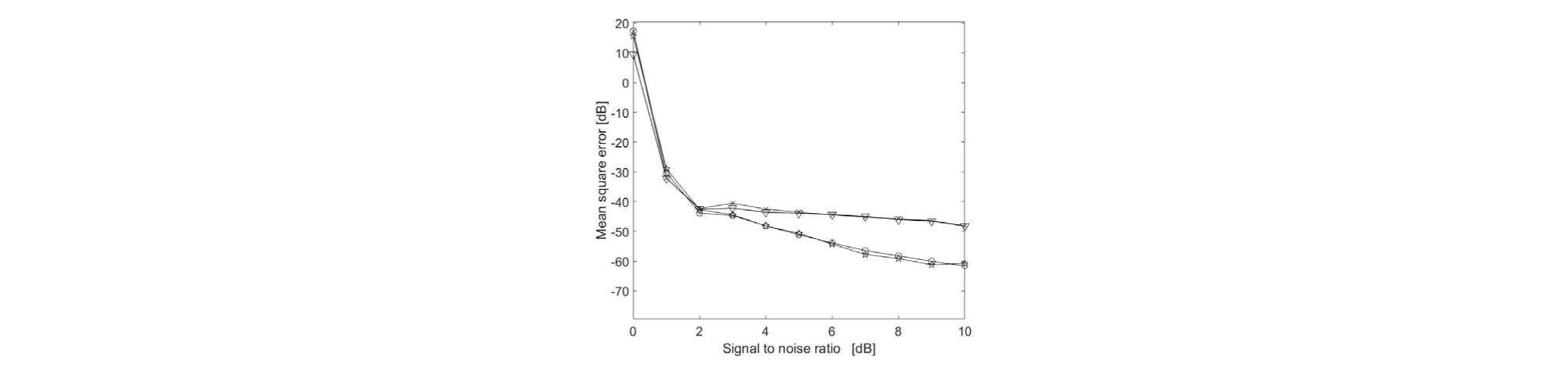
두 번째 비교실험을 위한 신호 열은 1차 AR과정인 신호로써, s(k) = 0.7s(k-1) + w(k),인 관계식을 만족시키는 것으로 사용하였다. 이로써 음원이 유색 신호원의 성질을 갖도록 하였다. 나머지 스펙은 첫 번째 비교 실험 때와 같도록 하였다. 그리고 신호 대 잡음비는 0 dB부터 10 dB까지로 변화 시켰다.
각 각의 비교 실험에서 제안한 AC-GCC-PHAT 방법과 함께 GCC-PHAT방법[7]을 동등하게 비교하였다. 두 방법을 각 신호 대 잡음비에 대해서 100회씩 반복 시행하여 결과를 얻었다. 추정 성능 비교를 위해서 참 지연 값과 추정 지연 값 사이의 차이를 지연 시간 추정 오차라고 하고, 이 지연 시간 추정의 평균 자승 오차(mean square error)를 각 신호 대 잡음비에 대해서 그래프로 그렸다.
Fig. 4는 첫 번째 실험의 결과를 비교한 그림이다. Fig. 4로 볼 때 백색 광대역 신호원에 대해 시간 지연에 상관없이 약 –4 dB 이상에서부터 향상된 성능을 보인다. 추정 오차 향상 정도는 신호 대 잡음비 0 dB에서 PHAT-GCC방법에 비해서 5 dB 향상되었고, 10 dB에서 약 15 dB 정도의 성능 개선을 나타내고 있음을 알 수 있다.
Fig. 5는 두 번째 실험의 결과를 비교한 그림이다. Fig. 5로 볼 때 유색 신호원에 대해서도 시간 지연에 상관 없이 2 dB 이상에서 향상된 성능을 보인다. 추정 오차 향상 정도는 신호 대 잡음비 2 dB에서 PHAT-GCC방법에 비해서 2 dB정도 향상된 것을 시작으로 해서 신호 대 잡음비 5 dB에서는 PHAT-GCC방법에 비해서 7 dB정도 향상되었고, 10 dB에서 PHAT-GCC방법에 비해서 15 dB 정도 성능 개선을 나타내고 있음을 알 수 있다.
앞의 두 실험을 통해서 제안한 방법이 기존의 GCC-PHAT 방법에 비해서 상대적으로 우수한 시간 지연 추정 결과를 얻을 수 있음을 알 수 있다.