

I. 서 론
수중음향통신은 최근 해양에 대한 관심이 높아지고, 해양 탐사나 해저 자원 탐사가 활발해지면서 그 중요성이 확대되고 있다. 전자파는 수중에서 매질의 특성으로 인하여 급격한 감쇠가 발생하므로 장거리 혹은 고속 무선 통신이 거의 불가능하므로 대신 음파를 사용해야 한다. 따라서 수중무선통신 시스템 개발에는 수중음향학과 통신 기술이 융합되어야 한다.[1]
1980년대에는 비동기(incoherent)식 변조기법을 이용한 FSK(Frequency Shift Keying) 수중음향통신 시스템을 구현하였으나 전송량 및 전송속도의 증가를 위해서는 넓은 대역폭을 필요로 하는 단점을 가지고 있었다. 이에 미국 WHOI(Woods Hole Oceanographic Institution) 연구소에서 개발한 마이크로 모뎀은 FSK뿐만 아니라 PSK(Phase Shift Keying) 변복조를 병용할 수 있도록 구현되었다.[2] 최근에는 수중음향통신에서 OFDM(Orthogonal Frequency Division Multiplexing) 기법을 적용하려는 연구가 시도되고 있으며, 미국에서는 OFDM을 이용하여 20 kbps로 데이터 전송 실험을 수행하였다.[3] 또한 전송량 증대를 위해 송・수신기 간의 1:1 통신이 아닌 여러 대의 송・수신기를 사용하는 MIMO(Multi-Input Multi-Output) 기법을 적용한 연구가 활발히 이루어지고 있는데 Tao 등은 PSK 변조기법을 적용한 MIMO 통신을 이용하여 오차율  의 성능을 나타내었다.[4] 외국의 경우 상용 제품을 시판하고 있는데 미국의WHOI, Benthos, LinkQuest, DSPComm 및 독일의 Evologics사 등이 대표적이며, 대부분 FSK 방식을 기본으로 하되 PSK 기법이 보조적으로 제공되고 있다. 한편 국내에서는 수중음향통신에서 전송률 향상을 위해 센서 어레이를 적용한 연구가 이루어졌다.[5] 또한 OFDM과 DS-SS(Direct Sequence-Spread Spectrum) 방식에 대해 연구되고, 해상 실험이 수행되었는데 모두 PSK 변조기법을 적용하였다.[6,7] 최근에는 근거리의 담수(fresh water)에서 통신이 가능한 ASK(Amplitude Shift Keying) 방식의 모뎀이 개발되기도 하였다.[8]
의 성능을 나타내었다.[4] 외국의 경우 상용 제품을 시판하고 있는데 미국의WHOI, Benthos, LinkQuest, DSPComm 및 독일의 Evologics사 등이 대표적이며, 대부분 FSK 방식을 기본으로 하되 PSK 기법이 보조적으로 제공되고 있다. 한편 국내에서는 수중음향통신에서 전송률 향상을 위해 센서 어레이를 적용한 연구가 이루어졌다.[5] 또한 OFDM과 DS-SS(Direct Sequence-Spread Spectrum) 방식에 대해 연구되고, 해상 실험이 수행되었는데 모두 PSK 변조기법을 적용하였다.[6,7] 최근에는 근거리의 담수(fresh water)에서 통신이 가능한 ASK(Amplitude Shift Keying) 방식의 모뎀이 개발되기도 하였다.[8]
수중음향통신 시스템 설계에 있어서 고려되는 부분은 다중경로 전달, 도플러 현상, 전달 손실 및 배경 잡음 등을 들 수 있으며, 이 가운데 천해에서는 다중경로 전달과 도플러가 성능에 큰 영향을 미치게 된다. 이러한 다중경로 전달과 도플러 현상은 수신기 구조를 복잡하게 하므로 비교적 근거리・저전송율에서는 간단한 FSK 방식의 비동기식 수신기가 선호되는 이유이다. 선형 주파수 변조된 신호인 선형 chirp 신호를 반송파로 사용하는 방식이 연구되었는데 이는 수신기 구조가 간단하면서도 근거리 다중경로 전달 채널에서 향상된 성능을 나타내었다.[9] 하지만 여전히 도플러 현상을 극복해야 할 필요성이 있는데 이는 기존에 레이다나 소나 등에서 표적 탐지를 위해 연구된 신호들을 고려할 수 있다.[10-12] 이에 본 논문에서는 선형 chirp 신호 대신에 비선형 chirp 신호를 반송파로 사용하는 방법을 제안한다. 비선형 chirp 신호의 사용은 과거 레이다에서 표적 탐지 확률을 향상시키기 위한 신호로써 연구되었으며, 특히 도플러 현상에 강한 것으로 알려져 있다.[13] 이에 본 논문에서는 비선형 chirp 신호 가운데 특히, 하이퍼볼릭 함수로 표현되는 신호를 반송파로써 사용하였다.
II. 비선형 chirp 신호를 이용한 수중음향통신
일반적인 디지털 통신 시스템에서는 전송하고자 하는 정보를 반송파의 크기, 주파수, 위상 또는 이들의 혼합으로 생성된 신호에 실어 보낸다. 하지만 이들 방식에는 각각의 장단점이 존재하는데 위상 정보를 사용하는 PSK 변복조 기법의 경우 다중경로 전달 채널이나 도플러 현상을 극복하기 위해 수신기가 복잡해진다는 단점이 있다. 이러한 문제를 보완하기 위해 과거에 반송파로써 선형 chirp 신호를 사용하는 방식이 제안되었다. 선형 chirp 신호를 사용하는 기존의 방식은 다음과 같다. 한 심볼의 길이를 T라 할 때 전송하고자 하는 이진 신호를  , 선형 chirp 신호를
, 선형 chirp 신호를  , 그리고 변조된 신호를
, 그리고 변조된 신호를  라 하면 아래와 같이 표현된다.
라 하면 아래와 같이 표현된다.
 . (1)
. (1)
 는 심볼 구간 T에서 0 또는 1의 값을 가지며,
는 심볼 구간 T에서 0 또는 1의 값을 가지며,  는 다음 식과 같다.
는 다음 식과 같다.
여기서  는 반송파 크기,
는 반송파 크기,  은 시작 주파수,
은 시작 주파수,  는 초기 위상, 그리고
는 초기 위상, 그리고  는 다음 식과 같이 정의되는 chirp rate로써
는 다음 식과 같이 정의되는 chirp rate로써  은 심볼 구간 T에서 마지막 주파수이다.
은 심볼 구간 T에서 마지막 주파수이다.
 . (3)
. (3)
 의 부호가 양이면 up-sweep 신호가 되며, 음이면 down-sweep 신호가 된다. 이러한 선형 chirp 신호의 순간 주파수
의 부호가 양이면 up-sweep 신호가 되며, 음이면 down-sweep 신호가 된다. 이러한 선형 chirp 신호의 순간 주파수  는 Eq.(2)의 괄호 안의 항들을 시간에 관한 미분으로 얻어진다.
는 Eq.(2)의 괄호 안의 항들을 시간에 관한 미분으로 얻어진다.
 . (4)
. (4)
이에 반해 본 논문에서는 반송파로써 선형 chirp 신호 대신에 아래와 같이 나타내어지는 비선형 chirp 신호를 사용하는 방법을 제안한다.
 , (5)
, (5)
여기서  는 다음과 같이 정의된 상수이다.
는 다음과 같이 정의된 상수이다.
 . (6)
. (6)
이러한 비선형 chirp 신호의 순간 주파수  는 Eq.(5)의 괄호 안을 미분하여 얻어진다.
는 Eq.(5)의 괄호 안을 미분하여 얻어진다.
 . (7)
. (7)
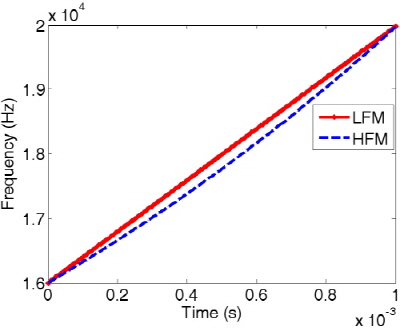
Eq.(7)은 하이퍼볼릭 함수이며, 따라서 본 논문에서 사용한 반송파는 하이퍼볼릭 주파수 변조된 신호가 된다. Fig. 1은 선형 chirp 신호인 선형 주파수 변조된 형태의 반송파와 비선형 chirp 신호인 하이퍼볼릭 주파수 변조된 반송파의 순간 주파수를 나타낸 것이다. 1 ms 구간에서 시작 주파수는 16 kHz, 대역폭은 4 kHz로 하였다. 그림으로부터 선형 chirp 신호와 비선형 chirp 신호의 시작과 끝 주파수는 같지만 중간 부분에서 chirp rate가 다르게 나타나는 것을 볼 수 있으며, 이는 대역폭과 관련이 있다. 대역폭이 넓어질수록 선형 chirp 신호와 차이가 나타난다.
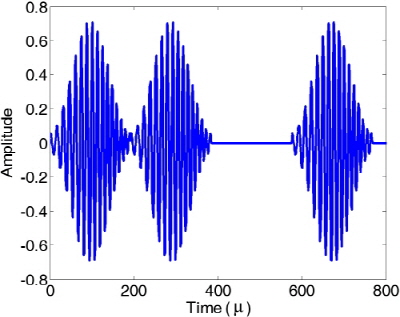
제안한 방법은 하이퍼볼릭 주파수 변조된 반송파를 갖는 ASK 전송으로 생각할 수 있다. Fig. 2는 비트 열 ‘1101’의 변조된 신호 파형을 보여준다. 심볼 ‘1’ 구간에서는 하이퍼볼릭 주파수 변조된 반송파를 가지며, 심볼 ‘0’ 구간은 침묵(silence) 구간이다. 수신기 는 원래의 이진 신호를 복원하기 위한 것으로 대표적인 것은 정합 필터이다. 정합 필터는 수신된 신호와 송신 신호 사이의 유사도를 측정하는 것이며, 제안한 방법 역시 정합 필터를 이용하여 신호를 복원할 수 있다.
제안한 방법이 도플러 현상에 강인한 특성을 갖는 이유는 다음과 같다. 수중에서 음파의 전달 속도를  , 송수신기 사이의 상대 속도를
, 송수신기 사이의 상대 속도를  라 하면 도플러 인자
라 하면 도플러 인자  는 다음과 같이 정의된다.
는 다음과 같이 정의된다.
 . (8)
. (8)
수식 전개의 편의를 위하여 다중경로 전달은 없다고 가정하면, 수신된 신호  는 다음과 같다.
는 다음과 같다.
 , (9)
, (9)
 ,
,여기서  는 크기 감쇠 인자,
는 크기 감쇠 인자,  는 송수신기 사이의 음파 전달 시간이며,
는 송수신기 사이의 음파 전달 시간이며,  는 첨가 잡음이다. 이제 수신단에서의 순간 주파수
는 첨가 잡음이다. 이제 수신단에서의 순간 주파수  는 Eq.(10)의 괄호 안을 미분하여 얻을 수 있다.
는 Eq.(10)의 괄호 안을 미분하여 얻을 수 있다.
 .
.따라서 Eqs.(7)과 (11)을 비교하면 수신신호와 송신 신호의 순간 주파수 관계는 다음과 같아진다.
 . (13)
. (13)
Eq.(13)에 의하면 도플러가 발생한 경우 수신신호는 단순히 송신신호의 시간 지연 형태로만 나타나는 것을 알 수 있으며, 이는 정합 필터 출력의 크기에는 영향을 미치지 않는 것을 알 수 있다. 따라서 도플러가 발생하더라도 정합 필터 출력의 크기에는 변화가 없으므로 이진 값 검출에는 영향을 미치지 않게 된다.
III. 시뮬레이션 및 해상실험 결과
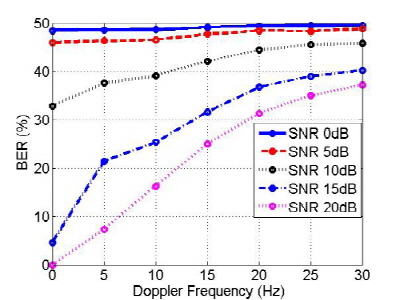
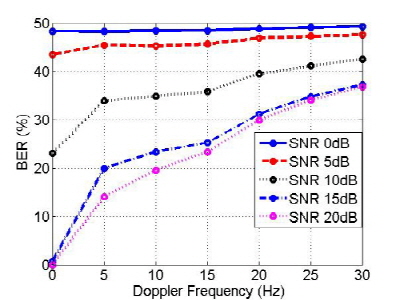
제안한 방법의 성능을 확인하기 위하여 시뮬레이션과 실험을 수행하였다. 먼저 시뮬레이션을 위하여 시작 주파수와 샘플링 주파수는 각각 12 kHz와 192 kHz, 대역폭은 8 kHz로 하였다. 이 때 하나의 비트에 해당하는 펄스의 길이는 1 ms이다. 하이퍼볼릭 주파수 변조된 반송파뿐만 아니라 기존의 선형 주파수 변조된 반송파를 사용한 경우를 서로 비교하였다. Fig. 3은 1 kbps 전송율인 경우 선형 주파수 변조된 신호가 SNR과 도플러 편이에 따른 비트 오차율을 나타낸다. Fig. 4에는 SNR에 따라 하이퍼볼릭 주파수 변조된 반송파를 사용한 경우의 비트 오차율 성능을 나타내었다. Figs. 3과 4를 통해 제안한 하이퍼볼릭 주파수 변조된 반송파를 사용한 경우가 기존의 선형 주파수 변조된 반송파를 사용한 경우보다 약 5~12 % 정도 차이가 나는 것을 비교할 수 있다.
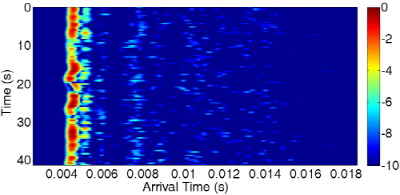
수중에서의 실질적인 성능을 검증하기 위해 해상실험을 수행하였다. 송신기와 수신기 사이의 거리는 약 40 m, 송수신기는 수심 약 2 m 지점에 각각 설치하였다. 하지만 실제 송수신기를 장착한 플랫폼은 조류의 영향으로 인한 이동성이 있었다. 송신기로는 ITC-1001, 수신기는 B&K 8106, 그리고 파워 앰프는 B&K 2713이 사용되었으며, 이외의 모든 규격은 시뮬레이션과 같게 하였다. 실험 당시 수심은 약 4~5 m였으며, 풍속 1~4 m/s의 바람이 불규칙하게 불었다. Fig. 5는 실험 모식도를 나타내며, Fig. 6은 실험 당시에 시간이 지남에 따라 채널 전달 특성의 변화를 보여준다. 채널 전달 특성을 구하기 위해 길이가 10 ms이고, 8 kHz의 대역폭을 갖는 선형 주파수 변조된 신호를 40 s 동안 주기적으로 전송하였다.
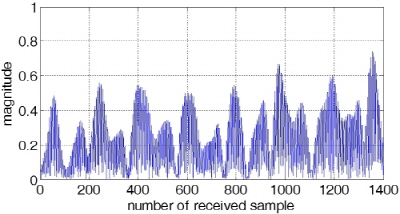
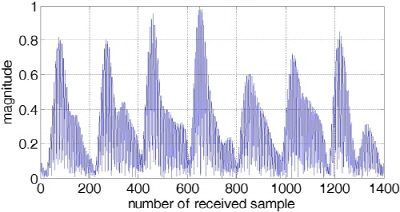
Fig. 6으로부터 직접파가 도달한 후 약 10 ms 정도까지 잔향이 나타나는 것을 볼 수 있으며, 특히 약 3 ms 후에 반사파가 나타나는 것과 함께 시변동성도 관찰할 수 있다. 위에서 도플러 주파수를 추정한 결과 약 0.52~0.86 Hz 로 나타났다. 또한 수심이 낮고, 송수신기 간의 거리가 근거리였기 때문에 해수면/해저면 반사파의 응답과 직접파의 응답이 잘 분리되지 않게 나타났다. Fig. 7은 수신된 LFM 신호를 정합필터에 통과 시켰을 때 의 일부분이고 Fig. 8은 수신된 HFM 신호의 정합필터 출력이다. Figs. 7과 8은 바이너리 값이 ‘1 1 1 1 0 0 1’이며 각각 같은 값으로 정규화 된 것으로 제안한 방법의 정합필터 출력 값이 2배정도로 크게 나타난다. Table 1에 각 패킷 전송 때마다 제안한 방법과 기존의 선형 주파수 변조된 신호를 반송파로 사용한 경우의 비트 오차율을 나타내었는데 이 때 어떠한 채널 부호화 기법도 적용하지 않았다. 조류에 의한 약한 도플러 편이가 존재하는 해상 실험에서 제안한 방법의 평균 비트 오차율은 5.39 %로 나타났으며, 기존의 선형 주파수 변조된 반송파를 사용한 경우에는 비트 오차율이 9.36 %로 나타나 제안한 방법의 비트 오차율이 약 57.6 % 정도 향상된 것으로 나타났다.
IV. 결 론
본 논문에서는 수중음향통신에 있어서 간단한 송수신 구조를 가지면서 도플러 문제를 극복하기 위해서 하이퍼볼릭 주파수 변조된 반송파를 사용하는 방법을 제안하였고, 이의 성능을 평가하기 위해 시뮬레이션과 해상실험을 수행하였다. 결과에서 제안한 방법은 기존의 선형 주파수 변조된 반송파를 사용한 경우보다 향상된 성능을 보였다. 하지만 비교적 넓은 대역폭을 필요로 하고, 높은 전송율을 얻기는 어려우므로 상대적으로 낮은 전송율에서 근거리이지만 송수신기 사이에 상대적인 움직임이 있는 환경에서의 통신에 적합할 것으로 판단된다.
향후 연구 내용으로는 서로 다른 하이퍼볼릭 주파수 변조된 반송파를 다수 이용하여 심볼을 할당하는 방법 등에 대한 연구가 필요하다. 아울러 다양한 도플러 편이를 포함하는 해상 실험을 통한 성능 분석에 대한 연구도 진행되어야 할 것이다.
