

I. 서 론
II. 과도 신호 추출을 위한 사운드 마스크 필터
2.1 사운드 마스크 필터
2.2 사운드 마스크 필터링
2.3 최대우도법
III. 과도 신호 추출 결과 및 토의
3.1 사운드 마스크 필터링 전후 신호
3.2 두 개의 서로 다른 과도 신호 발생 시에 각각의 과도 신호 추출
IV. 결 론
I. 서 론
수중 소음은 해양에서 다양한 물리적인 기작을 토대로 발생하는 음향 현상으로서 신호에 섭동을 일으키거나 소나 시스템 운용을 저해하는 경향이 있다. 수중 소음의 발생 원인에 따라서 크게 주변 소음, 자체 소음, 잔향음, 음향 간섭 등으로 구분된다.[1] 이 가운데 자체 소음, 잔향음, 음향 간섭은 주로 소나 시스템 자체에 의한 원인이나 능동 소나 운용에 의한 영향이 지배적인 반면, 주변 소음은 시스템 외적인 자연 발생 혹은 선박이나 산업 활동 등 인공 발생에 의해 주로 야기된다. 주변 소음은 지리적인 위치, 수심, 해양 환경[2-3] 등에 따라서 몇 일 혹은 측정 기간 내내 발생하는 영구 소음(permanent noise)과 생물, 강우 등 수 초에서 수 시간 혹은 수 일에 걸쳐 발생하는 간헐 소음(intermittent noise)으로 다시 나뉘게 된다.[1] 영구 소음은 장기간 측정된 자료를 바탕으로 많은 연구들이 수행되어 Wenz 모델[4]이나 WOTAN (Weather Observations Through Ambient Noise) 모델[5-6] 등을 이용하여 소나 운용 예측에 활용되고 있다.[7] 반면에, 간헐 소음은 생물, 강우뿐만 아니라 우박,[8] 눈,[8-9] 퇴적층 이동,[10-11] 천둥이나 항공기 소음,[12-13] 잠수하는 새[14] 등 시공간적으로 매우 다양한 원인에 의해 발생하기 때문에 예측이나 측정이 쉽지 않고, 이로 인해 소나 운용에 있어서 제한 요소로 인식된다.
간헐 소음은 영구 소음과 함께 주변 소음의 범주에 포함되지만[1] 영구 소음이 존재하는 환경 하에서 국지적으로 짧은 시간 동안 발생하는 소음이기 때문에 영구 소음과는 구별될 필요가 있다. 이러한 관점에서 간헐 소음은 ‘주기를 갖지 않고 제한된 지속 시간을 갖는 결정적 신호’라고 정의되는 과도 신호[15]로 간주될 수 있다. 과도 신호의 분류는 시간-주파수 분석,[16-17] 퍼지 논리,[18] 혼합 은닉 마르코프 모델-다층 인지(Hybrid hidden Markov Model-Multilayer Per-ceptron, HMM-MLP)[19] 등을 기반으로 하는 자동 분류 기법이 제안되었다. 그리고 과도 신호의 속성에 따른 분류 작업 또한 진행되었다.[20] 그러나 모든 신호의 분류가 필요 없는 원하는 신호만을 인식하는 경우에는 고도로 훈련된 음탐사의 지각 동기 방식을 기반으로 하는 분류에는 미치지 못하는 것으로 나타났다. 실제 해양 환경에서는 영구 소음이 배경 소음으로 존재하는 상황에서 일시적으로 그리고 국지적으로 과도 신호가 발생하기 때문에 과도 신호와 수중 영구 소음과의 분리가 매우 중요하다. 특히 과도신호의 분류 상황에서는 특정한 과도신호만 필요한 경우가 많으므로 원하는 과도 신호만을 추출하는 방법의 필요성이 대두된다.
본 논문에서는 해양 수중 소음원 내에서 과도 신호를 추출하기 위해 정합필터 방법을 이용하여 얻어진 사운드 마스크 필터를 활용하였다. 일반적으로 사운드 마스킹은 의도적으로 백색 잡음 등의 소음을 발생시켜 원 신호를 판별하기 어렵게 하는 방식으로[21] 주로 도청 방지나 소음 제어 등에 사용되고 있다. 그러나 본 연구에서는 사운드 마스킹과는 다른 사운드 마스크 필터로서 추출하고자 하는 표준 신호의 정합 정도를 기반으로 하는 마스크 필터를 만들어서 배경 소음을 제거하고 특정한 과도소음을 추출하는 방법을 제안하였다.
II. 과도 신호 추출을 위한 사운드 마스크 필터
2.1 사운드 마스크 필터
사운드 마스킹은 원치 않은 소리를 은닉하기 위해 원 신호에 백색 잡음이나 분홍 잡음 같은 인위적인 소리를 더하는 기법으로서, 이는 역 위상의 소리를 이용하는 소음을 제거하는 능동소음제어와는 다른 방식이다. 사운드 마스킹 현상은 일상 생활에서 쉽게 접할 수 있다. 예를 들어, 주변 소음이 많은 지역에서 타인의 목소리나 TV 소리 등이 잘 들리지 않거나 비가 오는 날 조용하게 느껴지는 현상 등이 있다. 일반적으로 마스킹 효과는 음성의 소음을 마스킹하여 소음을 제거하는 데에 활용되거나 원격 회의 시스템에서 화자의 음성이 반향을 마스킹하여 반향을 억제하는 데에 활용되기도 하였다.[22-23] 본 연구에서는 이러한 육상에서 적용하는 음성 처리의 개념을 활용하여 원하는 과도 신호의 추출에 사운드 마스크 필터를 적용하였다. 즉, 수중 소음원에서 원하는 신호만을 추출하기 위해 표준 신호를 이용하여 마스크 필터를 만들고 이를 원 음원에 씌우는 방식을 활용하였다. 이는 일반반적으로 시용되는 사운드 마스킹의 원래의 의미와는 다른 개념으로 원치 않는 소리를 은닉하고 원하는 신호만을 추출하는 개념으로 마스크 필터를 사용하였다.
2.2 사운드 마스크 필터링
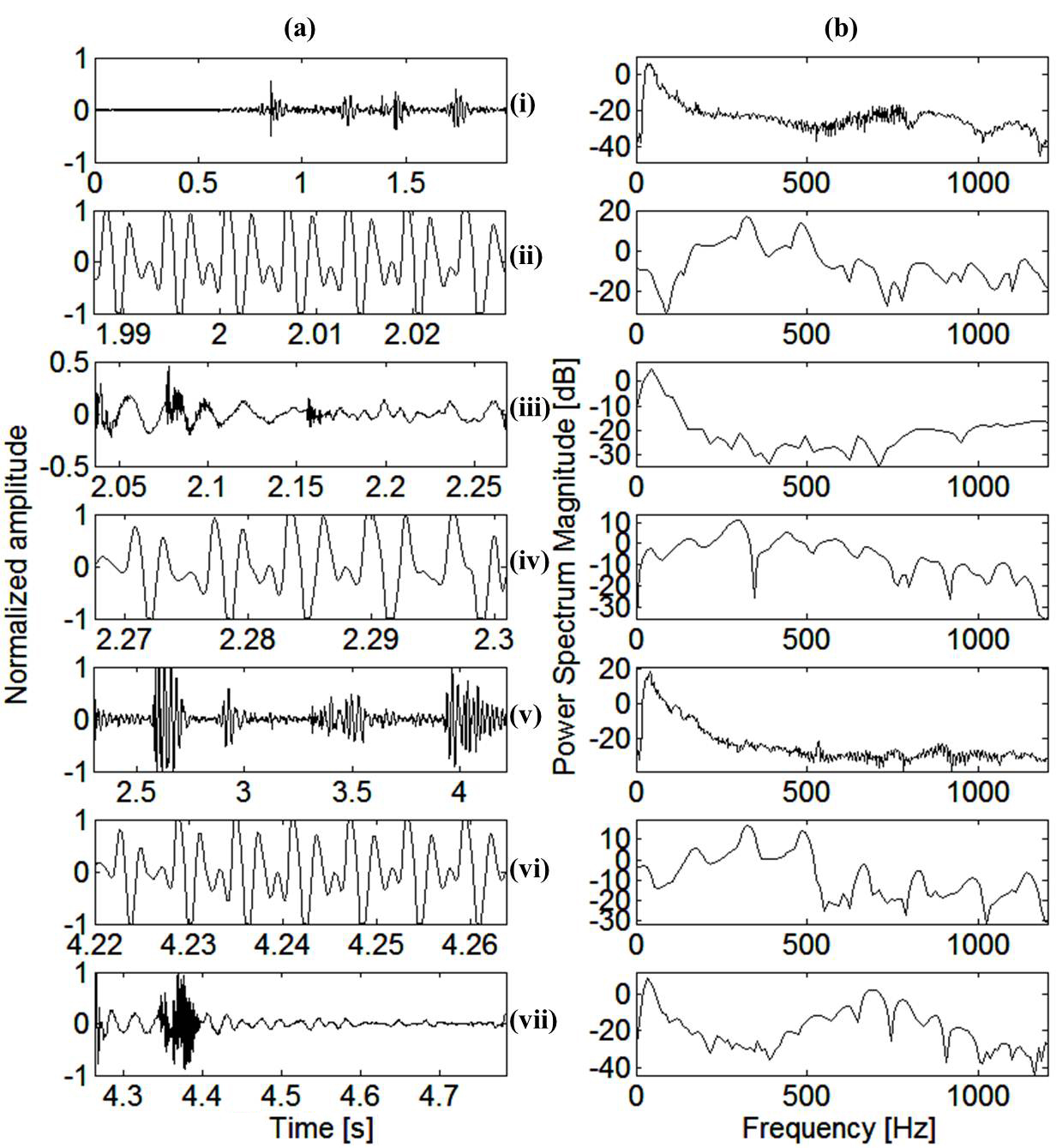
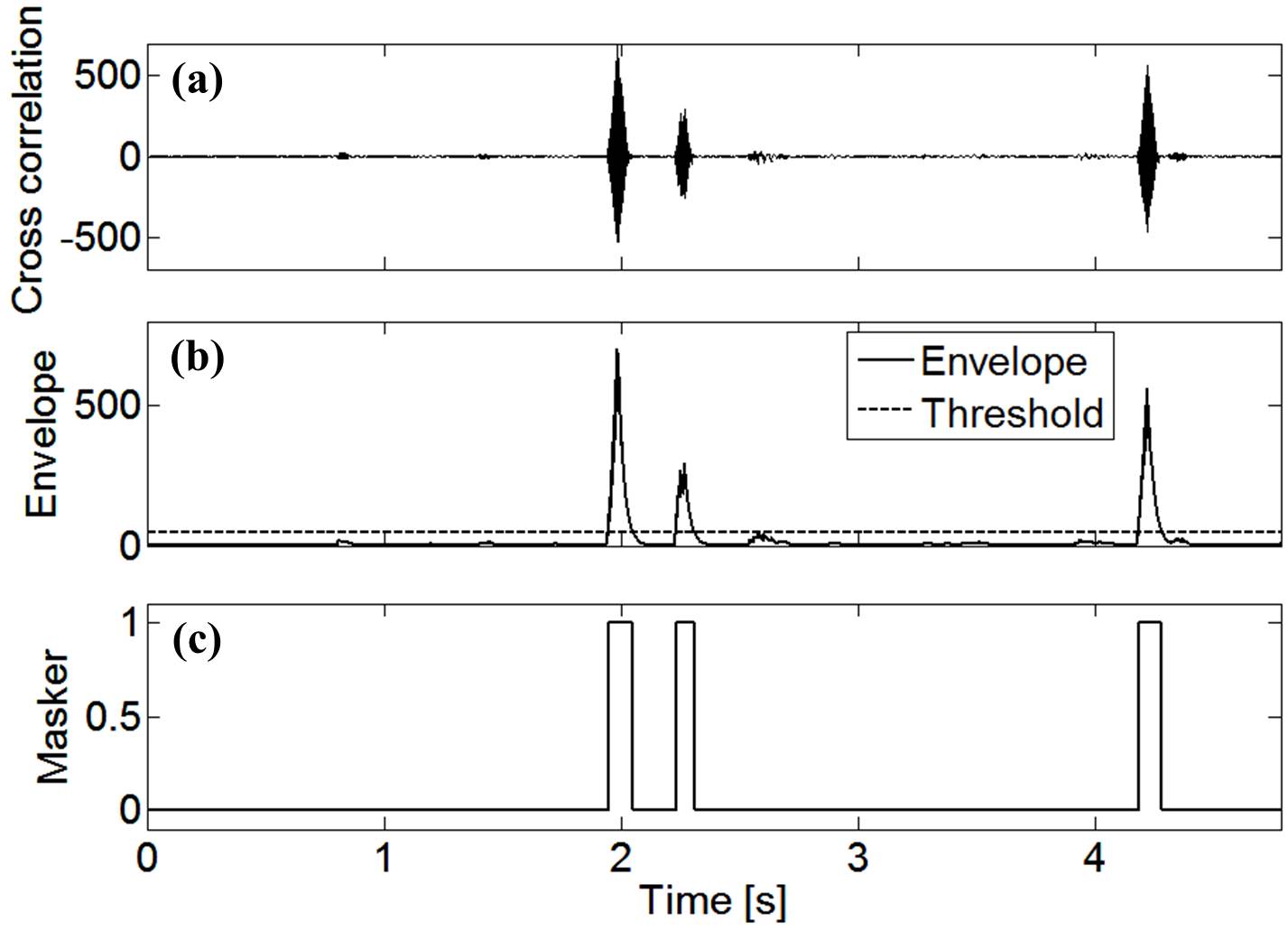
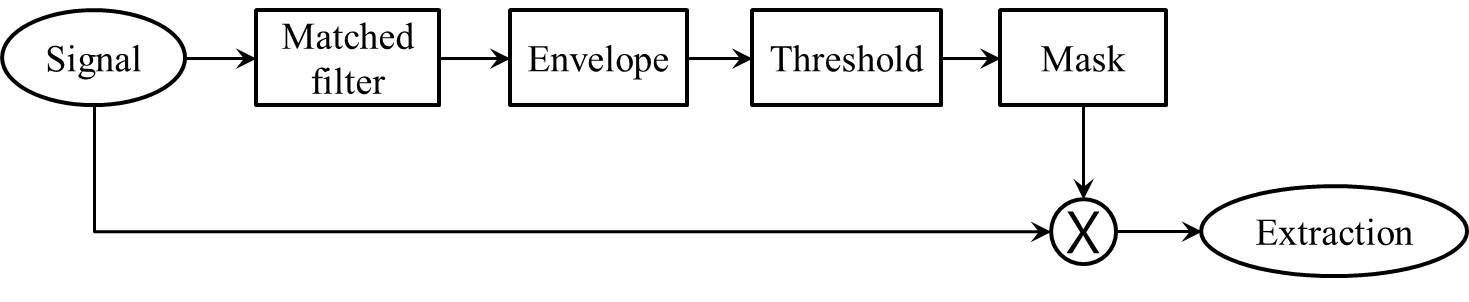
해양에서 녹음된 바다메기{Galeichthys felis (Linnaeus)} 음원의 시계열 신호와 주파수 성분은 그림 1과 같다. 표준신호를 찾기 위해 원 신호를 시간에 따라서 7개 구역으로 나누었다(그림 1a, 표 1). 주파수 성분을 살펴보기 위해 각 구역의 파워스펙트럼밀도를 구하였다(그림 2b). 해밍 창문함수를 사용하고, 50% 겹침을 수행하여 고속 푸리에 변환을 하였다. 이때 시간 분할은 211,000, FFT 수는 215, 샘풀링 주파수는 44,100 Hz였고 파워스펙트럼밀도의 단위는 dB이다. 그림 2에서 보는 바와 같이, ii, iv, vi 구역에서 음압이 가장 크고 세 구역 모두 320 Hz와 480 Hz에서 강도가 높다. 이러한 현상은 원 신호에서도 유사한 양상을 나타내기 때문에 그림 2의 ii 구역을 표준 신호로 선정하였다. 표준 신호와 원 신호의 상호상관신호를 구하고(그림 3a),[24] 이에 상응하는 포락선에서 최대우도법을 이용하여 역치를 정하여(그림 3b)[25] 그 이하의 값은 0으로, 그 이상의 값은 1로 하는 마스크를 만들었다(그림 3c). 이 때, 마스크 필터를 0과 1의 사각 창의 형태로 만든 이유는 시간 축에서 상호상관계수의 역치 이상에 해당하는 구간만을 추출하기 위함이다. 역치에 오차 한계를 두고 마스크 필터를 구축하였지만 신호 왜곡을 막고 부엽 효과를 최소화하기 위해 10%만큼의 오차 한계를 설정하여 역치 값을 줄여서 마스크 필터링할 경우를 비교하였다. 이상의 절차에 대한 흐름은 그림 4와 같다. 즉, 원 신호에 상호상관 신호를 얻는 정합 필터를 사용한 후 포락선을 검출하고 역치를 추정하여 마스크 필터를 만든다. 그리고 이를 원 신호에 씌워 과도 신호를 추출한다.
2.3 최대우도법
최대우도법은 통계학에서 가장 널리 사용되는 매개변수 추정법으로, 표본에서 얻은 확률밀도함수가 최대값이 되도록 하는 매개변수의 추정치를 계산하는 방식이다.[25] 이에 대한 기본 개념은 관찰된 현상의 가장 큰 원인인 메시지에 해당하는 결정을 선택하는 것이다. 두 메시지 m1, m2에 대한 최대우도 검파 규칙, d(z)는 다음과 같다.
| (1) |
여기서 조건부 확률밀도함수 p는 식(2)와 같이 레일레이 함수를 사용하였다. 이는 가우시안 함수 형태의 임의의 신호의 포락선이 레일레이 분포를 나타내기 때문이다.
|
그림 4.사운드 마스크 필터링의 블록 다이어그램 Fig. 4.Block diagram of sound mask-filtering. |
| (2) |
여기서 σ는 표준 편차이고, 검파 구역, Z는 식(3)과 같다.
| (3) |
우도 비율, Λ(z)는 식(4)와 같이 정의되고, Z는 식(5)와 같이 된다.
| (4) |
| (5) |
상기 과정을 간소화하면 식(6)과 같고, 이를 활용하여 마스크를 만든다.
| (6) |
III. 과도 신호 추출 결과 및 토의
3.1 사운드 마스크 필터링 전후 신호
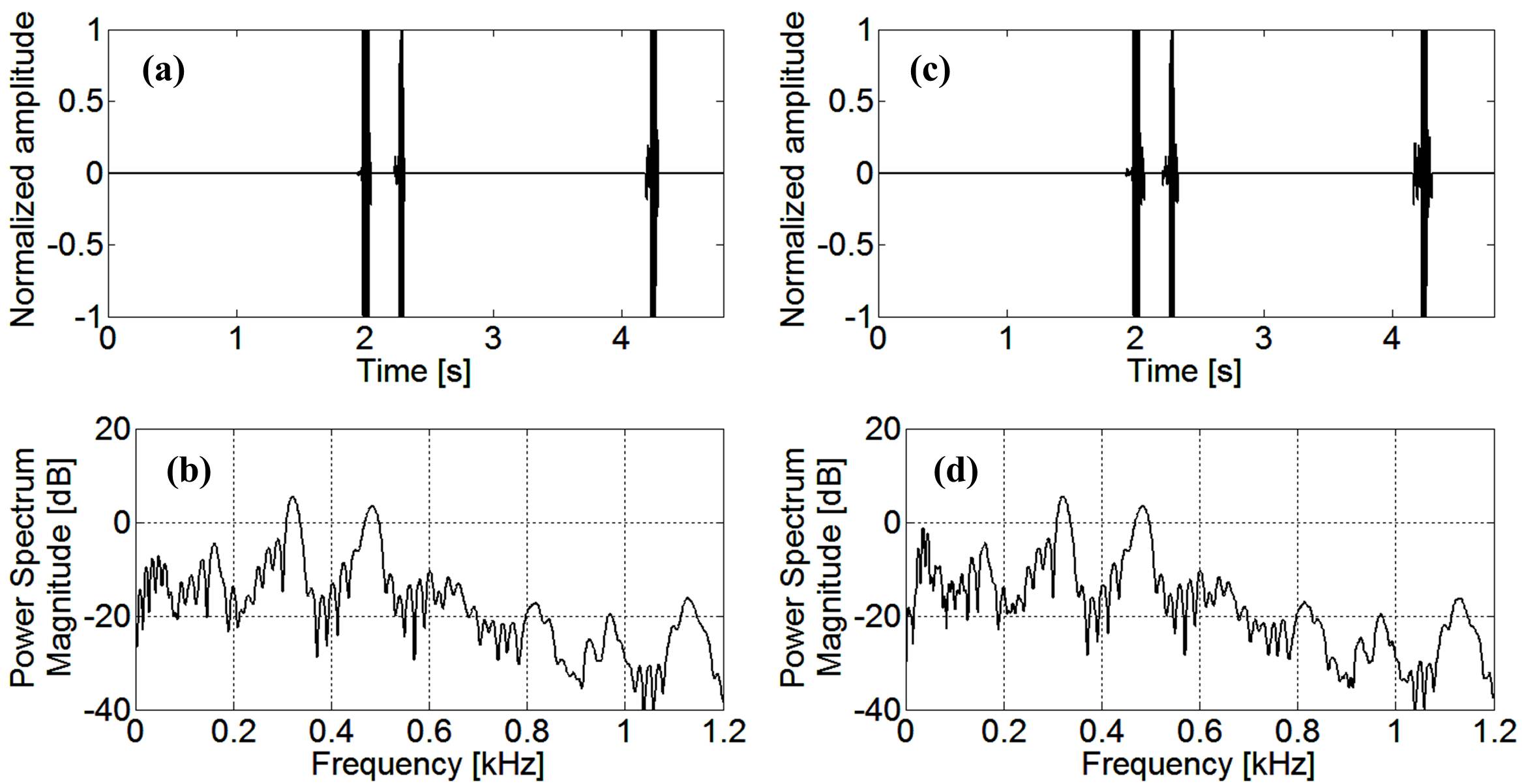
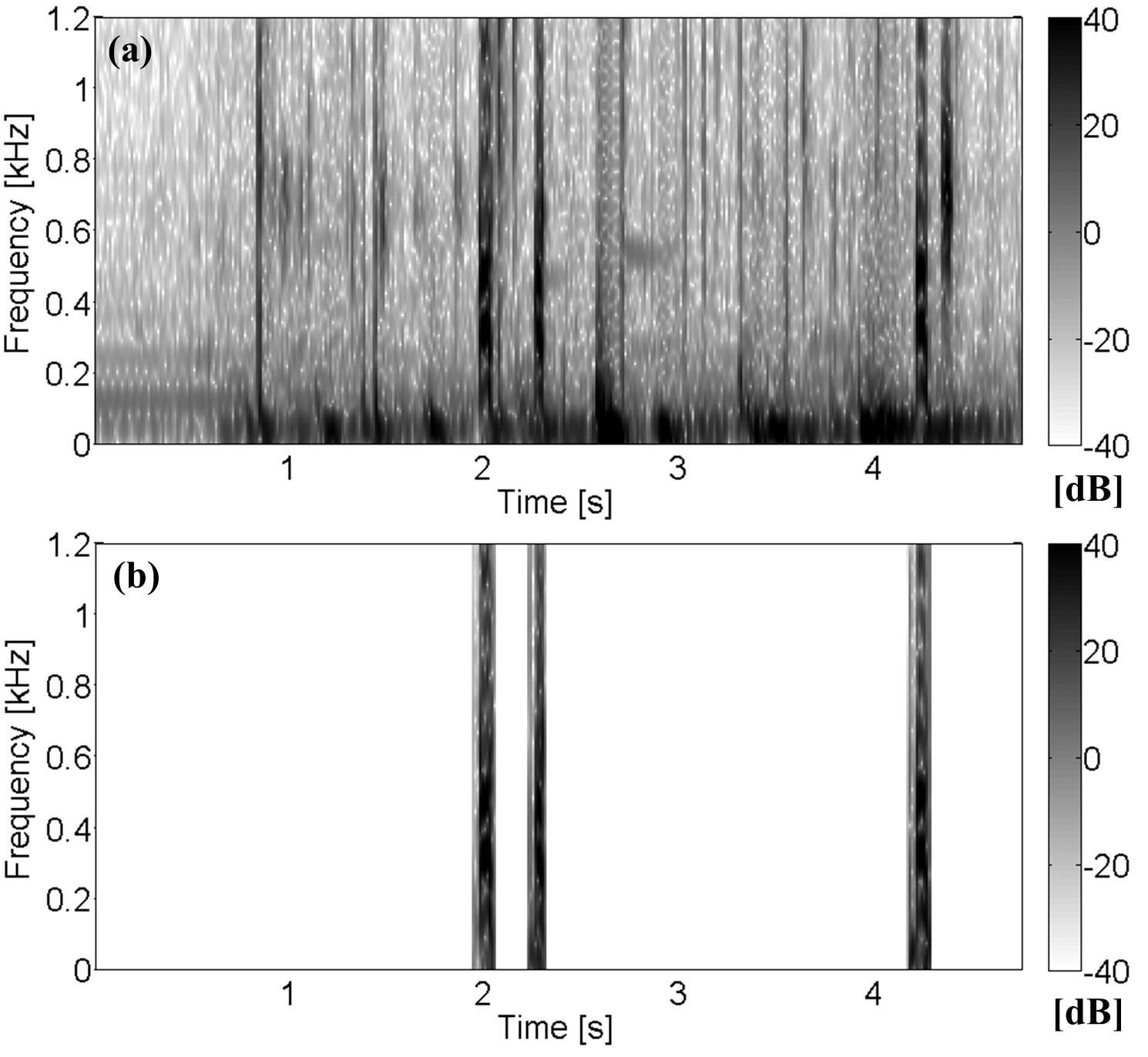
표준 신호를 이용하여 생성한 마스크를 원 신호에 씌어 마스크 필터링 된 신호를 구하였다(그림 5). 역치에 의해 구해진 마스크에서 1을 취하는 구역(식(5)의 우도 비율, Λ(z)이 1보다 큰 영역)이 1.95 ~ 2.05 s, 2.23 ~ 2.31 s, 4.18 ~ 4.28 s이기 때문에 원 신호에서 이 세 구역을 제외한 나머지 구간에서 신호가 제거되어 마스크 필터링 된 신호를 구하였다. 마스크 필터링 된 신호를 주파수 성분에서 보면 원 신호에서 나타났던 200 Hz 이하의 저주파 대역이 제거되었다 (그림 5b). 역치에 10%의 오차 범위를 두고 마스크 필터를 설계한 경우 그림 5c에서 보는 바와 같이, 추출된 구간이 1.93 ~ 2.07 s, 2.21 ~ 2.33 s, 4.16 ~ 4.30 s로 다소 확장되었지만, 주파수 성분에서는 320, 480 Hz 부근의 정점이 동일한 파형으로 나타났다. 즉, 목적에 맞게 역치의 오차 한계를 설정할 수 있지만 본 연구에서는 그 값을 0으로 하여도 추출된 신호에는 큰 차이가 없음을 확인하였다. 원 신호와 마스크 필터링 된 신호의 스펙트로그램을 보면 그 차이는 더욱 두드러진다. 원 신호의 1.95 ~ 2.05 s, 2.23 ~ 2.31 s, 4.18 ~ 4.28 s 구역에서 공통적으로 320 Hz와 480 Hz를 정점으로 하는 주파수 분포가 형성되고 그 외 구역에서는 광대역의 주파수 분포를 보이고 있다 (그림 6a). 본 음원의 마스크 필터링 된 신호는 그림 6b에서 보는 바와 같이 상기 세 구역을 제외한 나머지 구역은 제거된 스펙트로그램을 보인다. 한편, 그림 6a에서 원 신호의 0.85, 1.45, 2.62, 4.34 s 부근에서 320, 480 Hz가 아닌 다른 주파수 대역에서 정점을 보이는 현상은, 그림 1b에서 보이는 바와 같은 원 신호의 스펙트럼에서 나타나지 않은 주파수 대역이기 때문에 표준 신호를 결정하는 데에 영향을 미치지 않는 것으로 판단되었다. 생물 음원의 경우, 생물의 상태에 따라 음원의 특성이 다르게 나타나기도 하지만 본 음원의 전 구간에 걸친 주파수 성분 가운데 320, 480 Hz에서 정점의 특성을 보이는 경향은 그림 2의 ii, iv, vi와 유사하기 때문에 ii을 바다메기의 표준 신호로 간주하였고, 이와 유사한 주파수 특성을 갖는 구역을 제외한 다른 구역은 마스크 필터링되었다.
본 연구에서 제안하는 사운드 마스크 필터링은 해양 수중 소음원 가운데 일시적으로 나타나는 특정한 과도 신호를 추출하기 위한 방식이다. 과도 신호는 그 예가 너무 다양하고 주파수 특성 또한 여러 형태로 나타나며 특히 생물 소음의 경우 동일한 개체에서 나오는 음원의 특성이 다르게 나타난다. 이로 인해 수중 소음원에서 특정한 과도 신호를 분류하는 것이 쉽지 않은 작업이다. 본 논문에서 제안하는 방식은 추출하고자 하는 표준 신호를 결정하고 신호 대 잡음 비를 높이기 위해 원 신호와의 상호상관관계를 계산하여 포락선을 검출하고 역치를 선택하여 이를 기준으로 원 신호에 마스크를 씌워 원하는 과도 신호를 추출하는 것이다. 그렇기 때문에 그림 7에서 보는 바와 같이, 표준 신호에 따라서 추출되는 신호의 차이가 발생할 수 있다. 그림 7의 좌측은 그림 2의 iv를 표준 신호로 사용한 경우이고, 우측은 그림 2의 vi를 표준 신호로 사용한 경우에 각각에 대한 마스크 필터링 결과이다. 그림 7-좌a에서 보는 바와 같이, 마스크 필터링 된 신호는 1.96 ~ 2.05, 2.25 ~ 2.32, 2.58 ~ 2.67, 3.93 ~ 3.97, 4.20 ~ 4.28 s 구역에서 표준 신호와 유사한 신호가 검출되었다. 시계열 신호에서는 상기 5개 구역에서만 과도 신호로 검출된 반면, 주파수 성분을 보면 그림 7-좌b와 같이, 원 신호와 유사한 경향을 보였다. 그림 2의 vi을 표준 신호로 책정할 경우, 그림 7-우a에서와 같이, 1.95 ~ 2.05, 2.23 ~ 2.30, 2.58 ~ 2.61, 4.18 ~ 4.28 s 구역에서 표준 신호와 유사한 신호가 검출되었다. 이 경우는 iv를 표준 신호로 사용한 경우와는 다르고 ii를 표준 신호로 사용한 경우와는 유사하게 200 Hz 이하의 저주파 대역이 제거되었다. 이러한 이유는 그림 2에서 보는 바와 같이 iv의 시계열 성분이 ii, vi와 유사하더라도 주파수 성분이 다르기 때문이다.
3.2 두 개의 서로 다른 과도 신호 발생 시에 각각의 과도 신호 추출
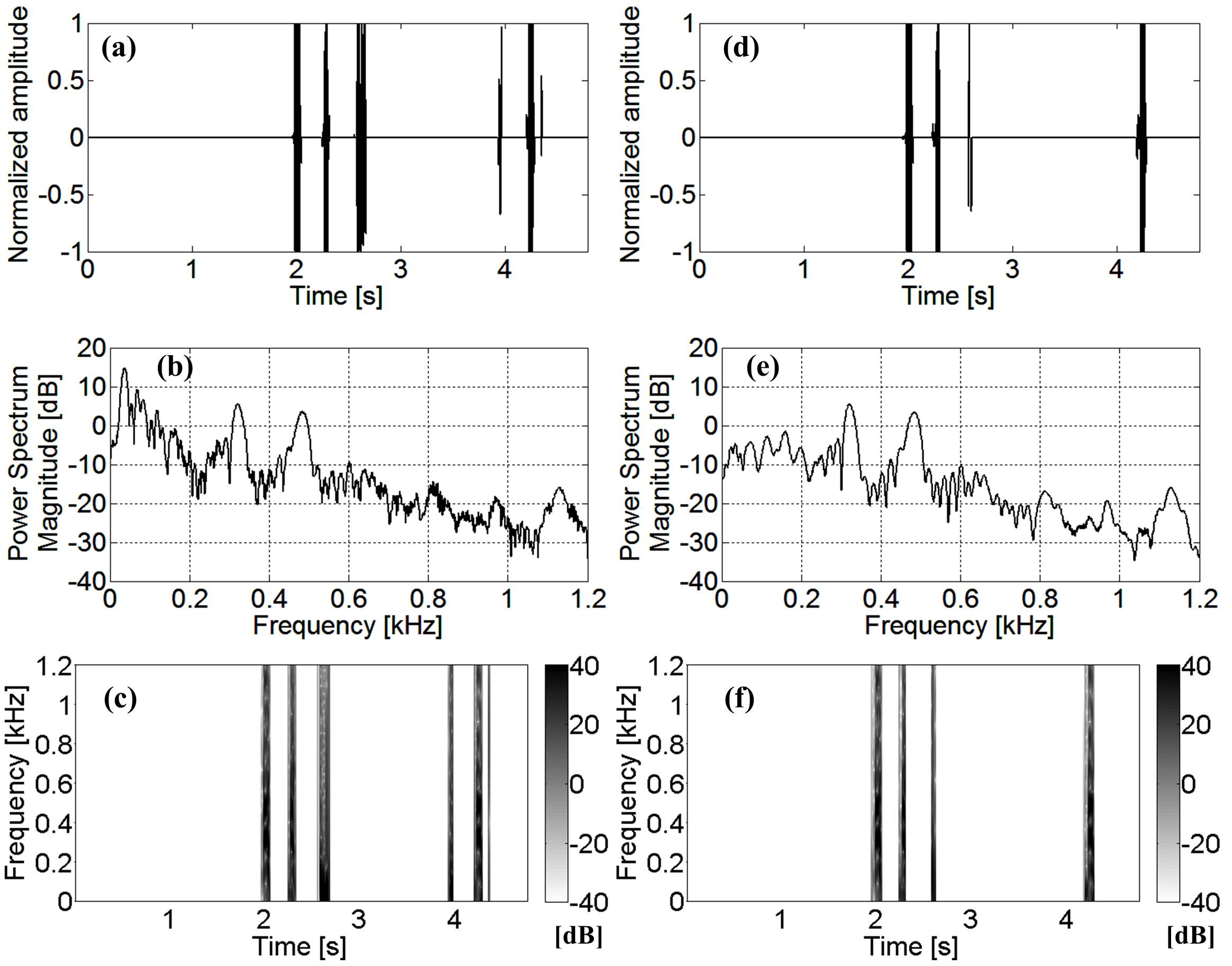
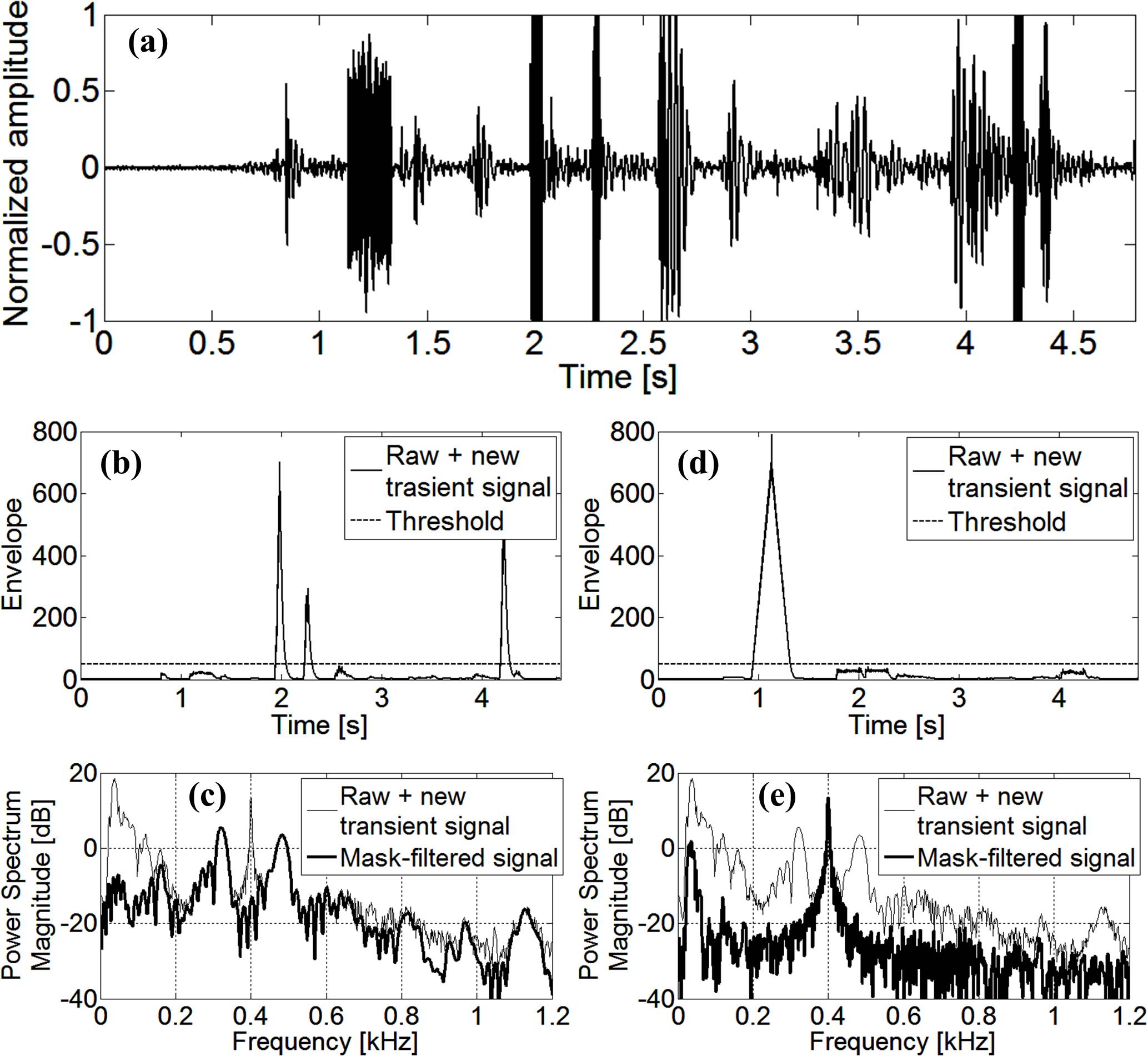
서로 다른 두 종류의 과도 신호가 발생할 경우 원 신호에서 각각의 과도 신호를 추출하여 비교하였다. 그림 8a에서 보는 바와 같이, 원 신호의 1.13 ~ 1.33 s 구간에 새로운 과도 신호를 발생시켰다. 새로운 과도 신호는 정규화된 진폭을 실효치(Root Mean Square, RMS) 0.4로 하는 주파수 400 Hz의 정현파형 신호에 정규화된 진폭을 RMS 0.1로 하는 백색 잡음을 더하였다. 새로운 과도 신호는 기존의 표준 신호와의 상호상관관계가 작기 때문에 포락선 상에서 모두 역치 값 이하의 수치를 나타내었다(그림 8b). 즉, 새로운 과도 신호가 추가 되더라도 원 신호에서 기존의 과도 신호를 추출하는 데에는 영향을 미치지 않는다. 마스크 필터링 된 신호를 살펴보면, 과도 신호가 원 신호에 추가되더라도 표준 신호와의 상호상관관계가 매우 적기 때문에 역치 이하로 판별되어 새로운 과도 신호 성분은 사라지게 된다(그림 8c). 새로운 과도 신호를 표준 신호로 하는 마스크를 만들어서 같은 방식으로 과도 신호를 추출하면 그림 8d와 같은 포락선이 검출되고 그림 8e와 같이 마스크 필터링 된 신호가 추출된다.
물론, 시간 영역에서 분리되어 있지 않은 신호를 역치 이상에서 통과시키는 방식으로는 두 신호의 분리가 불가능하다. 또한, 시간 영역에서 분리된 신호라 하더라도 두 신호의 특색이 유사할 경우 상호상관계수가 유사하기 때문에 과도 신호의 분리 추출이 쉽지 않을 것이다. 본 논문에서 연구된 방식은 역치 이상을 통과시키기 전에 과도 신호와 원 신호의 상호상관계수를 구하기 때문에 과도 신호의 추출이 가능하다. 결론적으로, 두 개의 서로 다른 신호가 시간 영역에서 분리되어 있지 않다 하더라도 상호상관계수와 최대우도법에 의한 역치를 활용한 방식으로 과도 신호만을 추출하는 것은 가능하다고 여겨진다.
IV. 결 론
본 논문에서는 사운드 마스크 필터링 방식을 활용하여 해양 수중 소음 내에 일시적으로 존재하는 과도 신호를 추출하는 기법에 대한 연구를 수행하였다. 해양에서는 시공간적으로 여러 형태의 과도 신호가 존재하여 수중 소음과는 별개로 소나 운용에 있어서 저해 요소로 작용을 하기 때문에 신호 특색에 따라서 수중 소음 내에서 원하는 과도소음의 추출이 필요하다. 본 논문에서는 제안된 사운드 마스크 필터링 방식을 이용하여 원하는 측정된 신호로부터 바다메기 및 인공적으로 만들어진 과도 신호를 추출하였으며, Matlab 버전 7.0을 이용하여 그래픽 사용자 인터페이스 기반의 소프트웨어를 개발하였다. 그리고 과도 신호 추출 시에 표준 신호의 선택이 중요함을 제안하였다. 이에 본 연구 결과는 원하는 과도 신호를 추출하고 이를 데이터베이스화의 가능성 및 특정 과도소음의 검출에 유용할 것이다.
