

I. 서 론
수중음향통신은 다양한 해양환경 변화에 따라 시․공간 변동성을 가지며, 특히 연안지역과 같은 천해에서는 다중경로 전달특성으로 인해 수십 ms 정도의 지연 확산 현상이 발생한다. 그리고 이 현상은 인접 심벌 간 간섭(ISI)을 유발하여 통신 성능을 저하시킨다.[1] 이렇게 왜곡된 데이터를 복원하기 위하여 수중음향통신 시스템에서는 일반적으로 등화기와 채널 부호화 기법 등을 적용하여 복원하는 연구가 이루어지고 있다. 위상 추정기와 적응 등화기를 적용하거나 채널 상태에 따라 등화 모드를 선택하는 등의 방법이 연구되었다.[2-4] 하지만 과거 대부분의 연구에서는 등화기와 채널 부호화 기법을 서로 별개로 적용하였으며, 이에 따라 성능 개선에도 한계를 나타내었다.
수신단에서 등화기와 채널 복호기 사이에 반복적인 연산 과정을 통해 심벌 간 간섭을 크게 줄일 수 있는 터보 등화기에 대한 연구가 이루어져 왔으며,[5-7] 최근에는 수중음향통신에도 적용되고 있다.[8] Oberg 등은 선형 등화기와 터보 복호화를 이용하여 4-QAM 변복조로 전송하여 평균 2.88 kbps 의 전송율을 얻었으며,[9] Choi 등은 직접 적응형 터보 등화기와 선형 MMSE(Minimum Mean Squared Error) 터보 등화기를 MIMO 시스템에 적용하여 성능을 비교하였다.[10] 또한 Otnes 등은 수심 10 m, 송수신기 사이 거리가 850 m인 경우 약 한 달간 실제 데이터를 수집하여 성능을 분석하였다.[11] 하지만 국내의 경우 수중에 위치한 센서 간의 거리에 따른 상관 특성이 제시되었으나[12] 아직 실제 해양환경에서 실험적인 방법으로 획득한 실측데이터를 이용하여 수중음향통신 시스템에 터보 등화기를 적용한 연구 사례는 부족한 실정이다.
본 논문에서는 동해 연안의 실험에서 획득한 데이터를 이용하여 터보 등화기를 갖는 수중음향통신 시스템의 성능을 검증하였다. 적용된 터보 등화기는 결정 궤환 등화기(DFE : Decision Feedback Equalizer)와 터보 복호기를 포함한다.
본 논문의 구성은 다음과 같다. 제 2장에서 터보 등화기에 대해 설명하고, 제 3장에서 해상실험환경 및 실험을 수행하여 얻어진 통신성능을 정리하고, 마지막 4장에서 결론을 맺는다.
II. 터보 등화기
터보 등화기는 기존의 등화기보다 좋은 성능을 보이지만 원래 MAP(Maximum a Posteriori) 알고리듬을 사용하기 때문에 복잡도가 채널 길이 등에 대해 지수적으로 증가하는 단점이 있다. 이러한 이유로 인해 터보 등화기의 복잡도를 줄이기 위한 방법으로 MAP 등화기보다 복잡도가 적은 선형 등화기나 결정 궤환 등화기를 사용하는 방법이 있는데 본 논문에서는 결정 궤환 등화기를 갖는 터보 등화기를 고려하였다. Fig. 1과 같은 시스템 모델을 고려하자. 데이터는 채널 부호화기를 거치고 난 뒤 인터리버, 심벌 매핑 후 변조기를 통과한다. 전송된 심벌은 채널을 통과한 후 백색 가우시안 잡음이 더해진다. 수신된 심벌은 먼저 PLL(Phase Locked Loop)을 거쳐서 위상추적을 하여 터보 등화기로 입력된다. 수신단의 터보 등화기는 등화기와 복호기로 구성되어 있으며, 등화기와 복호기는 인터리버와 디인터리버를 통해 연결되어 서로의 정보를 반복해서 갱신한다. 인터리버는 송신측에서 한 개 블록 크기의 부호기 출력 값을 재배치시키고, 디인터리버는 인터리버의 역 과정을 거쳐 송신신호를 복원한다. 복호기에서 출력한 피드백 정보는 다시 인터리빙 과정을 거쳐 정정된 신호를 등화기에 재입력한다. 송신된 신호는 수중채널을 거치고 백색 가우시안 잡음이 더해져 수신된다. 기저대역으로 변환한 후 ![]() 는 결정 궤환 등화기의 출력 값으로 수신 신호로부터 등화기에서 추정되어진 외부입력 값이다.
는 결정 궤환 등화기의 출력 값으로 수신 신호로부터 등화기에서 추정되어진 외부입력 값이다. ![]() 를
를 ![]() 시점에서의 등화기 입력 값이라 하면, 등화기의 출력은 다음 식(1)과 같이 정의할 수 있다.
시점에서의 등화기 입력 값이라 하면, 등화기의 출력은 다음 식(1)과 같이 정의할 수 있다.
|
Fig. 1. Model of the turbo equalization in baseband. |
| (1) |
![]() 는
는 ![]() 시점에서의 피드포워드 탭 계수이며
시점에서의 피드포워드 탭 계수이며 ![]() 는 성상도 상에서
는 성상도 상에서 ![]() 에 가장 가까운 점들인 slicer 출력 값이다. 일반적으로 결정 궤환 등화기에서 피드포워드와 피드백 계수들을 갱신하는 알고리즘은 다음과 같이 주어진다.
에 가장 가까운 점들인 slicer 출력 값이다. 일반적으로 결정 궤환 등화기에서 피드포워드와 피드백 계수들을 갱신하는 알고리즘은 다음과 같이 주어진다.
| (2) |
![]() 는 수렴상수이고
는 수렴상수이고 ![]() 는 DD (Decision-Directed) 오차로써 결정 궤환 등화기의 출력으로부터 추정되어진
는 DD (Decision-Directed) 오차로써 결정 궤환 등화기의 출력으로부터 추정되어진 ![]() 와 slicer 출력값인
와 slicer 출력값인 ![]() 의 오차를 이용하여 피드백을 통하여 결정 궤환 등화기의 출력 오차를 줄이는 계수값인
의 오차를 이용하여 피드백을 통하여 결정 궤환 등화기의 출력 오차를 줄이는 계수값인 ![]()
![]() 를 갱신하기 위하여 사용된다. LMS(Least Mean Square) 알고리즘을 사용하는 경우에 필터 탭 계수는 아래 식(3)을 통해 갱신되며, 여기서
를 갱신하기 위하여 사용된다. LMS(Least Mean Square) 알고리즘을 사용하는 경우에 필터 탭 계수는 아래 식(3)을 통해 갱신되며, 여기서 ![]() 는 식(4)와 같이 정의된다.
는 식(4)와 같이 정의된다.
| (3) |
| (4) |
![]() 은 아래와 같이 정의되는 시그넘 함수이며,
은 아래와 같이 정의되는 시그넘 함수이며, ![]() 는 식(6)과 같은 Sato 에러이다.
는 식(6)과 같은 Sato 에러이다.
| (5) |
| (6) |
여기서 ![]() 는 다음 식(7)과 같이 정의 된다.
는 다음 식(7)과 같이 정의 된다.
| (7) |
α[k]는 전송되어진 심볼이다. ![]() 값은 결정 궤환 등화기의 출력 값
값은 결정 궤환 등화기의 출력 값 ![]() 와
와 ![]() 의 차를 디인터리빙하여 계산되어져 터보 복호기로 입력되어 진다. 터보 복호기에서 추정되어진 외부입력 값
의 차를 디인터리빙하여 계산되어져 터보 복호기로 입력되어 진다. 터보 복호기에서 추정되어진 외부입력 값 ![]() 은 식(8)과 같이 구할 수 있다.
은 식(8)과 같이 구할 수 있다.
| (8) |
외부입력 값 ![]() 는 터보 복호기의 출력값으로써 사후 확률값을 계산하여 0 또는 1의 오류값을 보정할 수 있는 값이다. 이러한
는 터보 복호기의 출력값으로써 사후 확률값을 계산하여 0 또는 1의 오류값을 보정할 수 있는 값이다. 이러한 ![]() 와
와 ![]() 의 차이 값을 다시 인터리빙하여
의 차이 값을 다시 인터리빙하여 ![]() 를 계산하여 결정 궤환 등화기에 입력된다.
를 계산하여 결정 궤환 등화기에 입력된다. ![]() 를 업데이트 하여 오류값을 보정하는 방법을 취하게 되는데, 반복횟수가 늘어남에 따라 업데이트 하는 오류 보정값이 송신하고자 하는 원 신호에 가깝게 되어 BER 성능이 향상된다.
를 업데이트 하여 오류값을 보정하는 방법을 취하게 되는데, 반복횟수가 늘어남에 따라 업데이트 하는 오류 보정값이 송신하고자 하는 원 신호에 가깝게 되어 BER 성능이 향상된다.
III. 해상실험 및 결과
3.1 해상실험 환경
먼저 해상실험 환경을 분석하기 위하여 음속 분포를 측정하였다. 이는 2011년 6월 강원도 동해시 인근 해역에서 XBT를 이용하여 측정하였으며, 이를 Fig. 2에 나타내었다. 이 그림은 실험 당일 오전 9시경부터 오후 5시경까지 음속분포의 변화를 보여준다. 실험 해역의 수심은 약 200 m 였으며, 그림으로부터 실험 당시 수심 약 40 ~ 50 m까지 혼합층이 형성되어 있었으며, 그 아래는 거의 일정한 음속을 나타내는 특성이 보인다.
|
Fig. 2. Measured sound velocity profile. |
실험에 사용된 음원의 중심주파수는 6 kHz이고, 대역폭이 4 kHz인 대역통과필터를 적용하였다. 송신기는 수심 100 m에 위치하였으며, 수신기는 수심 약 200 m 해저 바닥 근처에 배치하였다. 수신 하이드로폰으로 Reson사의 TC-4032 모델을 사용하였고, 수신된 신호는 60 kHz의 샘플링율을 갖고 데이터를 직접 저장하였다. 음원과 수신기 사이의 거리는 약 5 km 였으며, Fig. 3에 해상실험 모식도를 나타내었다.
| |
Fig. 3. Experimental setup for sea trials. |
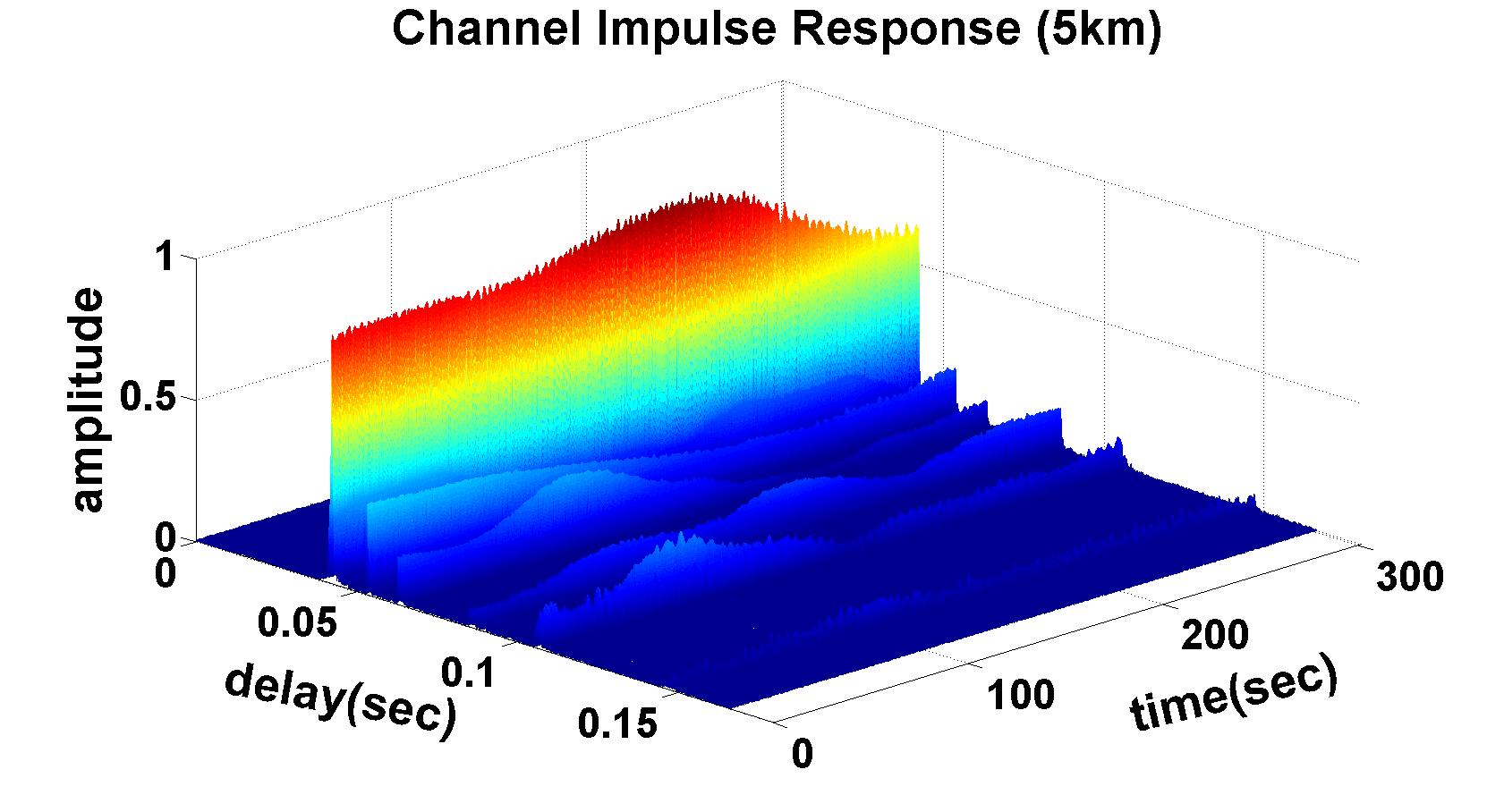
채널 임펄스 응답은 송신신호가 수신기에 도달할 때까지의 정보를 나타낸다. 이러한 채널 임펄스 응답을 통하여 송수신기 위치에 따른 시․공간적인 채널응답특성과 채널에서의 송신시간에 대한 도달 시간의 시변동성을 확인할 수 있다. 이에 통신 실험에 앞서 변조 범위 4 kHz에서 8 kHz를 가지는 LFM 신호를 이용하여 채널 응답 특성을 추정하였으며, 이를 Table 1에 나타내었다. Fig. 4는 LFM신호를 이용하여 얻은 채널응답특성으로써 시간에 따른 변동 특성을 보이는 5개 정도의 큰 반사특성 들을 보여준다.
Table 1. LFM signal structure. | |
length of signal | 300 s |
length of frame | 0.1 s |
interval of frame | 0.5 s |
bandwidth | 4 kHz ~ 8 kHz |
| |
Fig. 4. Measured channel time-delay profile. | |
3.2 수중음향통신 실험 결과
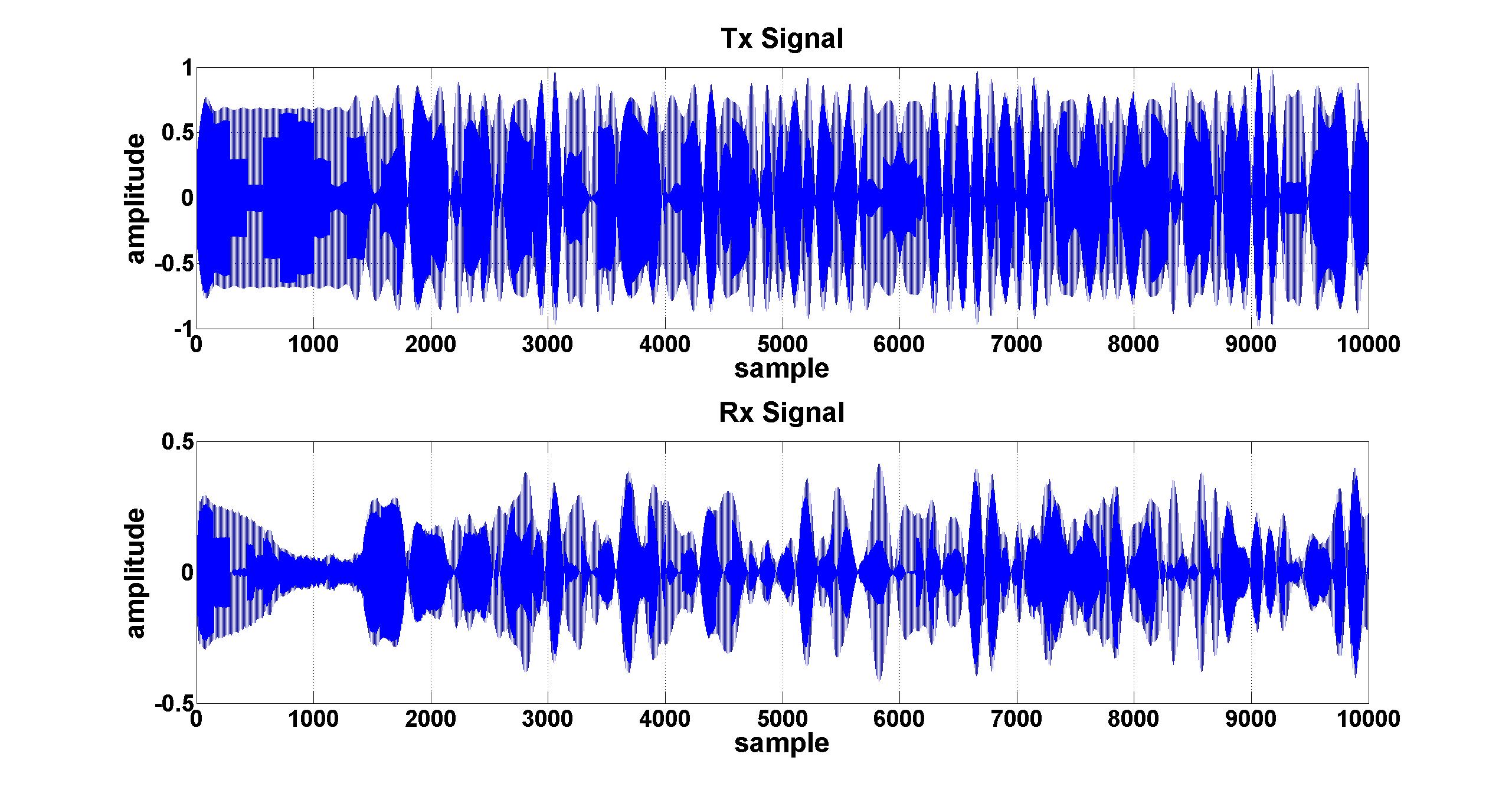
실험에서 전송한 데이터 신호는 6 kHz의 반송파에 QPSK 변조신호이고, 1 kbps의 데이터 전송률을 갖도록 하였다. Raised cosine 필터의 roll-off 지수는 0.35로 하였다. 수신된 신호를 처리할 경우 특정 신호 대 잡음비에서의 BER 값만 얻을 수 있으므로 전반적인 BER 곡선을 구하기 위해 송신 신호가 없는 시간대에 잡음만을 측정하여 신호 대 잡음비를 조절하였다. 터보 등화기의 성능을 고찰하기 위하여 수신된 신호는 반송파를 제거한 후 정합필터를 통과하여 기저대역으로 변환된다. 이어서 프리앰블 구간의 PN 신호를 이용한 패킷 동기화 과정을 거치고, 2차 PLL에 기반 한 위상 추적 및 터보 등화기 등을 적용하여 데이터를 검출하였다. 등화기의 초기 적응 과정 역시 프리앰블 구간에서 이루어진다. 전송 프레임의 총 심벌 수는 1576개, 프리앰블은 200개의 심벌을 사용하였다. 등화기는 LMS 알고리즘을 이용하여 시간에 따라 변화하는 채널의 전달특성을 보상하였다. LMS-DFE에서 사용되어진 FF/FB 탭수는 각각 14탭으로 고정하였고, LMS-DFE의 μ 값은 0.001을 사용하였다. 실험에서 사용한 터보 부호화기는 K SIZE = 984 bit, 부호화율 1/3을 가지는 터보 PI 부호화기를 사용하였다. 실험에 계산되어진 Eb/No는 수신단을 기준으로 하며, 별도로 수집한 잡음의 레벨을 조절하여 Eb/No 값을 조정하였다.[14] Fig. 5는 송신 및 수신된 신호의 파형을 나타낸다. Fig. 6은 Eb/No=10에서의 수신 신호, 반복 복호가 없는 경우 및 1~2회 반복 복호가 이루어진 후의 성상도들을 보여준다. Fig. 6.(b)에서는 터보등화기의 반복이 없을 때에는 수신 신호의 파형이 넓게 퍼져있는 것을 알 수 있다. 하지만 Fig. 6.(c), (d)에서 터보 등화기의 반복을 수행함에 따라 수신 신호의 파형이 원래의 QPSK 성상점으로 신호가 점점 모여드는 것을 알 수 있다.
|
Fig. 5. Transmit and Receive Signal. |
|
(a) |
|
(b) |
|
(c) |
|
(d) |
Fig. 6. Constellations, (a) received signal, (b) no iteration, (c) 1-iteration, (d) 2-iteration. |

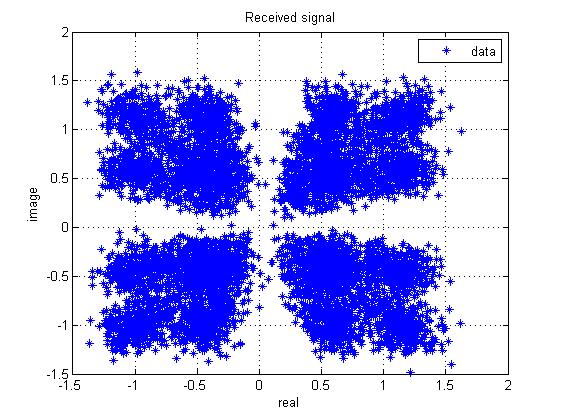
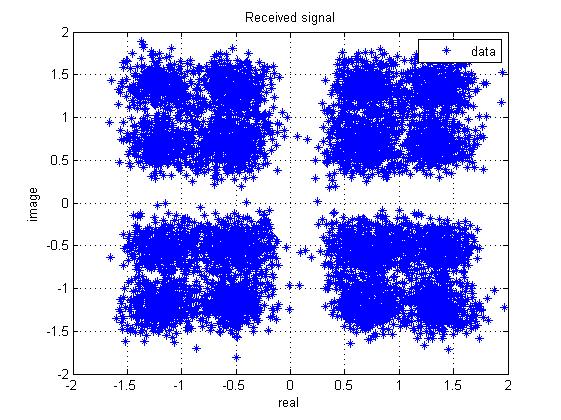
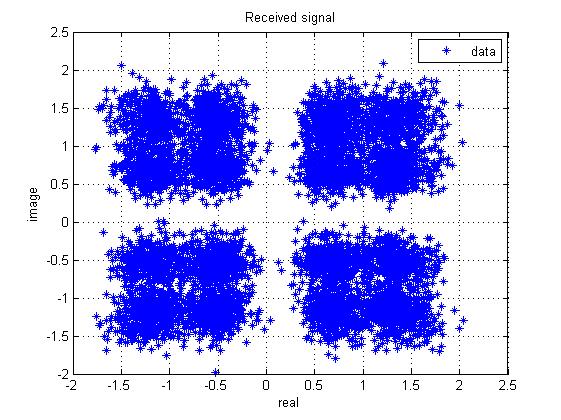
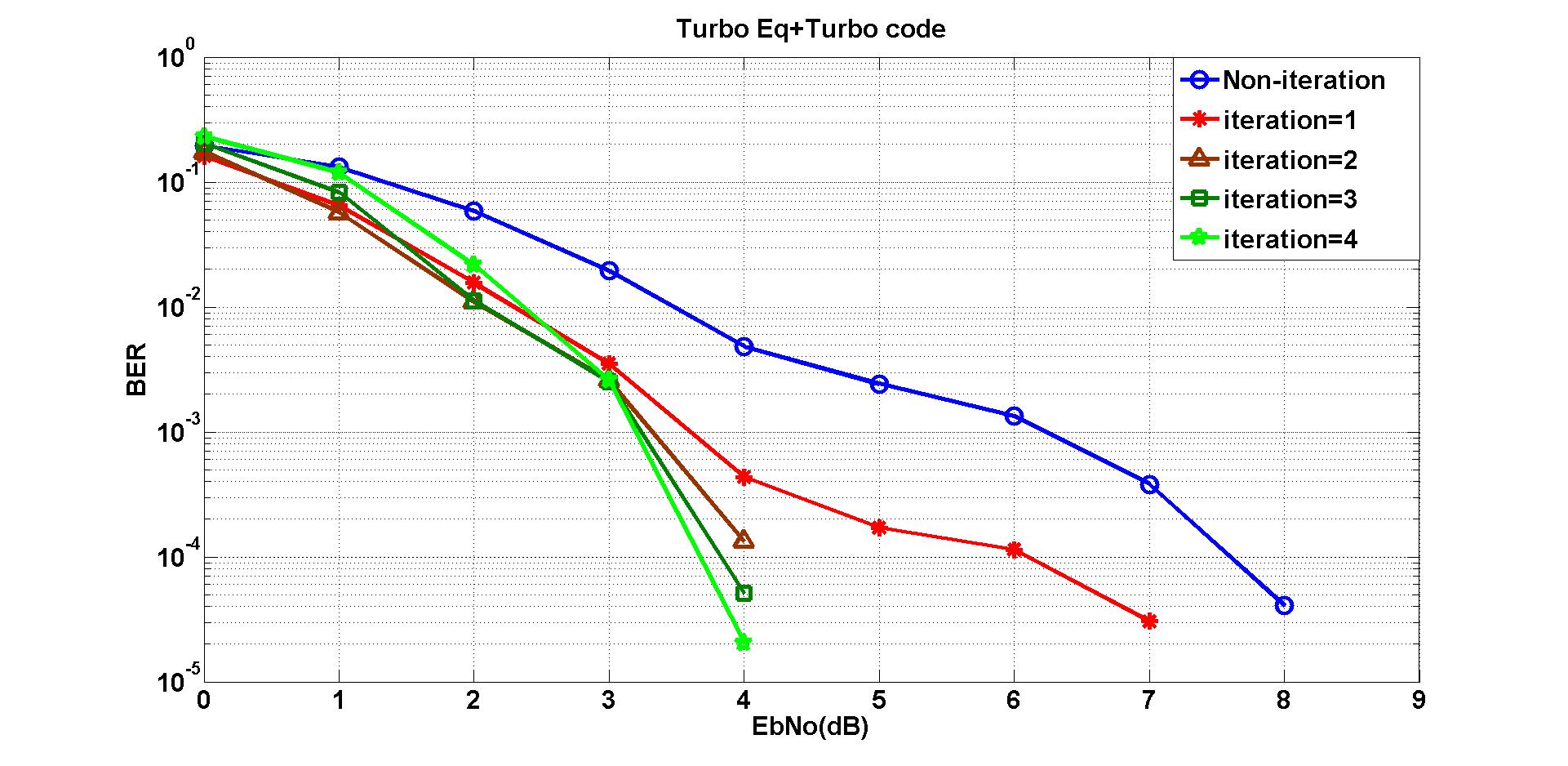
Fig. 7의 BER 성능에 따르면 반복 복호가 없는 일반적인 방법의 등화기를 이용하였을 때는 BER 10-4을 기준으로 약 Eb/No=7.5 dB에서 만족할만한 성능이 나타났다. 이에 비해 본 논문에서 사용한 터보 등화기를 이용하여 반복 복호를 하였을 때는, 1회의 반복을 하였을 때에는 10-4을 기준으로 반복이 없는 등화기를 사용하였을 때 보다 1.5 dB 성능이 향상되었다. 또한 터보 등화기의 반복이 2, 3 회로 늘어남에 따라 약 3.5 dB의 성능이 향상되었고, 3회 이상 반복하였을 때는 성능 향상이 크게 늘어나지 않기 때문에 복호 속도와 복잡도 면에서 보면 반복횟수는 3회가 적합함을 알 수 있다. 그리고 3 dB 보다 낮은 값을 가질 때는 반복 횟수가 증가할수록 성능이 열화되는 것을 볼 수 있는데, 이 경우에는 수신 신호의 왜곡이 커서 터보등화기와 터보 복호기의 반복이 증가할수록 오류정정율을 벗어나 오류가 더욱 증가하기 때문이다. 따라서 본 논문에서의 실험환경에서는 터보 등화기의 반복횟수는 3회, Eb/No=3 dB 일 때부터 터보 등화기로 인한 성능이 증가하며, 수중에서의 통신을 위해서는 Eb/No=4 dB 일 때가 적합함을 알 수 있다.
|
Fig. 7. BER Performance. |
IV. 결 론
천해에서 수중음향통신 채널은 다중 경로 전달 특성을 가지므로 심벌 간 간섭 현상에 의해 성능이 크게 저하된다. 이를 극복하기 위해 국외에서는 최근 터보 등화기를 적용하고자 하는 노력이 이루어지고 있다. 이에 본 논문에서는 우리나라 연근해 수중음향통신 채널에 따라 결정 궤환 등화기를 사용하는 터보 등화기의 성능을 수치실험과 해상실험을 통해 조사하였다. 그 결과 터보 등화기의 반복 수행 과정을 통해 성능의 이득을 얻을 수 있었으며, 소프트 정보를 사용함으로써 정확도를 향상시킬 수 있었다. 또한 반복 횟수가 증가함에 따라 BER 성능의 차이는 감소함을 확인할 수 있었다.
향후 본 논문과 같은 SISO(Single-Input Single-Output) 채널뿐만 아니라 MIMO(Multiple-Input Multiple-Output) 수중음향통신을 위한 터보 등화기 적용에 대한 연구가 이루어질 예정이다.
