

I. 서 론
II. 문제 기술
2.1 일반화된 부엽 제거기에 기반한 적응 빔 형성 기법
2.2 회전하는 견인 선배열 소나에서의 적응 빔형성기 설계 문제
III. 회전하는 견인 선배열 소나를 위한 일반화된 부엽 제거기 설계 기법
3.1 회전하는 견인 선배열 소나에서의 조향 벡터
3.2 회전하는 견인 선배열 소나에서의 일반화된 부엽 제거기 설계
IV. 적응 빔형성기 알고리즘
V. 시뮬레이션
5.1 시뮬레이션 시나리오
5.2 시뮬레이션 설정
5.3 시뮬레이션 결과
VI. 결 론
I. 서 론
수중에서 원하는 방향의 신호를 감지하기 위하여, 일반적으로 선배열 소나를 이용하여 빔을 형성함으로써 특정 방향의 신호를 강화한다. 뿐만 아니라, 적응 빔형성기를 이용하여 재머와 디코이 등과 같은 간섭 신호를 제거한다.
널리 사용되는 적응 빔형성기 중 하나가 바로 일반화된 부엽 제거기(Generalized Sidelobe Canceller, GSC)이다.[1] 그러나 기존 적응 빔 형성기와 달리, 견인 선배열 소나의 경우 견인함의 기동에 따라 선배열 소나가 직선 형태를 유지할 수 없으며, 따라서 이와 같이 회전하는 견인 선배열 소나(Towed Line Array SONAR System, TASS)를 위한 적응 빔형성기의 설계가 필요하다.
회전하는 견인 선배열 소나에서 빔형성기를 설계하기 위하여, 빔형성기 설계 과정에 있어 포물선 모델을 적용하는 연구가 진행된 바 있다.[2] 해당 연구는 추가적인 위치 정보 없이 변침 각도만을 이용하여 빔형성기를 설계하는 방법을 고안한 바 있으나, 본 연구는 적응 빔형성기가 아닌 고정된 빔형성기 설계에 한정되어 있다. 또한 Gerstoft는 포물선 모델을 이용하여 적응 빔형성기를 설계한 바 있으나,[3] 일반화된 부엽 제거기 구조에 기반하지 않아서 다양한 적응 알고리즘을 적용하기 어려운 면이 있고, 또한 자가-조율 능력이 없어 다양한 신호 환경에 대처하기 어려운 단점이 있다.
본 논문에서는 Gerstoft의 포물선 모델을 이용하여 적응 빔형성기를 설계하고자 하며, 특히 일반화된 부엽 제거기 구조를 바탕으로한 빔형성기 설계 기법을 제안한다. 본 논문에서 적용한 포물선 모델링은 TASS의 위치에 대한 추가적인 센서를 필요로 하지 않으며, 실제 운용 시 비정상적으로 급격한 변침이 일어나지 않는다는 가정 하에서 변침 각도만으로 모델링이 가능하다.[2]
II. 문제 기술
2.1 일반화된 부엽 제거기에 기반한 적응 빔 형성 기법
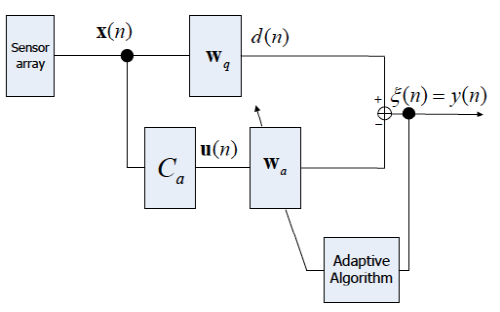
적응 빔 형성기를 이용하여 간섭 신호를 제거하기 위하여 널리 사용되는 형태중 하나는 Fig. 1과 같은 일반화된 부엽 제거기이다. 일반화된 부엽 제거기는 Fig. 1에서 보는 바와 같이 고정된 빔형성기  와 저지 행렬
와 저지 행렬  , 그리고 적응 빔형성기
, 그리고 적응 빔형성기  로 구성되어 있다.[1,4]
로 구성되어 있다.[1,4] 와
와  는 빔형성기 설계 시 결정되어 신호 환경에 따라 변하지 않는 값이며, 적응 빔형성기
는 빔형성기 설계 시 결정되어 신호 환경에 따라 변하지 않는 값이며, 적응 빔형성기  는 적응 알고리즘에 의해 신호 환경에 따라 변하는 값이다.
는 적응 알고리즘에 의해 신호 환경에 따라 변하는 값이다.
일반화된 부엽 제거기의 각 구성 요소들은 다음과 같이 정의된다. 빔을 형성하는 복소 가중치(weight) 벡터를  라 하고, 입력 신호 벡터를
라 하고, 입력 신호 벡터를  , 출력 신호를
, 출력 신호를  이라 하자. 여기서 입력 신호 벡터는 다음과 같이 임의의 시각
이라 하자. 여기서 입력 신호 벡터는 다음과 같이 임의의 시각  에서의 센서 배열 신호의 입력을 의미한다.
에서의 센서 배열 신호의 입력을 의미한다.
 , (1)
, (1)
여기서  은 센서 번호로
은 센서 번호로  의 정수 값을 가진다. 또한, 빔형성기 복소 가중치 벡터는 다음과 같이 정의된다.
의 정수 값을 가진다. 또한, 빔형성기 복소 가중치 벡터는 다음과 같이 정의된다.
 . (2)
. (2)
위의 정의에서 빔형성기의 출력 신호는 다음과 같은 관계를 가진다.
 . (3)
. (3)
위의 출력 신호가 원하는 방향의 응답을 가지기 위해서는, 빔형성기 가중치가 다음의 조건을 만족해야 한다.[1,4]
 , (4)
, (4)
여기서  는 제약 행렬로 일반적으로 다음과 같이 주어진다.[1,4]
는 제약 행렬로 일반적으로 다음과 같이 주어진다.[1,4]
 , (5)
, (5)
여기서  는 제약의 개수이며,
는 제약의 개수이며,  는 조향 벡터로 특정 각도
는 조향 벡터로 특정 각도  에서 배열로 입사하는 신호의 전달 함수이다. 또한 Eq.(4)의
에서 배열로 입사하는 신호의 전달 함수이다. 또한 Eq.(4)의  는 각 조향벡터에 해당하는 응답으로, 일반적인 빔형성기에서는 각 원소를 1로 가지는
는 각 조향벡터에 해당하는 응답으로, 일반적인 빔형성기에서는 각 원소를 1로 가지는  크기의 벡터이다.
크기의 벡터이다.
2.2 회전하는 견인 선배열 소나에서의 적응 빔형성기 설계 문제
위의 Eq.(5)에서 나타나는 조향 벡터에 대하여, 기존의 연구들은 주로 기본적인 선배열 센서의 조향 벡터를 사용하여 빔형성기를 설계하였다. 그러나 견인 선배열 소나의 경우 항상 고정된 선배열 형상을 가지는 것이 아니며, 특히 견인함이 회전하는 경우 직선 형태가 아닌 곡선 형태의 배열 형태를 가지게 된다. 본 논문에서는, 이와 같이 회전하는 견인 선배열 소나 환경에서 적응 빔 형성기를 설계하는 방법을 기술하고자 하며, 이를 위하여 회전하는 견인 선배열 소나의 조향 벡터를 기술하고, 이를 이용하여 일반화된 부엽 제거기를 설계하는 방법을 기술한다.
III. 회전하는 견인 선배열 소나를 위한 일반화된 부엽 제거기 설계 기법
3.1 회전하는 견인 선배열 소나에서의 조향 벡터
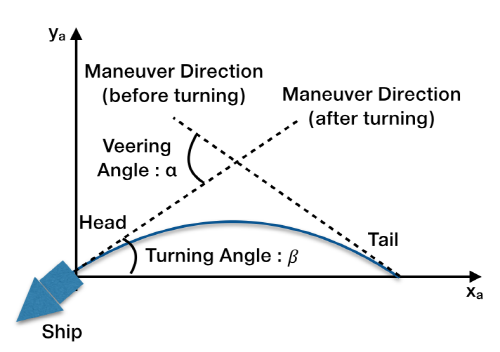
견인 선배열 소나의 견인함이 변침 각도  로 회전하는 경우를 가정하자. 이 때 견인 선배열 소나는 Fig. 2와 같이 포물선 형태로 모델링할 수 있으며,[2] 이 때 선배열 소나의 ‘선두(head)와 후미(tail)를 잇는 직선’과 선두 사이의 각도, 즉 선두 회전 각도
로 회전하는 경우를 가정하자. 이 때 견인 선배열 소나는 Fig. 2와 같이 포물선 형태로 모델링할 수 있으며,[2] 이 때 선배열 소나의 ‘선두(head)와 후미(tail)를 잇는 직선’과 선두 사이의 각도, 즉 선두 회전 각도  는 기하학 원리에 의해 다음과 같은 관계를 가진다.
는 기하학 원리에 의해 다음과 같은 관계를 가진다.
 . (6)
. (6)
Fig. 2와 같이 선두의 위치에 좌표계의 원점이 존재하도록 설정하면,  번째 센서의
번째 센서의  축 위치
축 위치  은 다음과 같이 주어진다.[2]
은 다음과 같이 주어진다.[2]
 , (7)
, (7)
여기서  은 직선 선배열일때
은 직선 선배열일때  축 위치를,
축 위치를,  는 선배열 전체 길이를, 그리고
는 선배열 전체 길이를, 그리고  는 휘어진 선배열 소나의
는 휘어진 선배열 소나의  축 방향 길이를 나타낸다. 센서 간의 거리
축 방향 길이를 나타낸다. 센서 간의 거리  를 가지는 등간격 배열의 경우, 이는 다음과 같이 다시 표현할 수 있다.
를 가지는 등간격 배열의 경우, 이는 다음과 같이 다시 표현할 수 있다.
 , (8)
, (8)
여기서  와
와  는 다음과 같은 관계를 가진다.[2]
는 다음과 같은 관계를 가진다.[2]
 . (9)
. (9)
한편, 선두의 위치가 좌표계의 원점에 존재한다는 사실을 이용하여, 포물선의 기울기를 이용한 적분 방정식의 해를 구하면  번째 센서의
번째 센서의  축 위치
축 위치  은 다음과 같이 구할 수 있다.[2]
은 다음과 같이 구할 수 있다.[2]
 . (10)
. (10)
이를 이용하여, 각도  에 위치한 음원에서 선배열 소나로의 전달함수, 즉 조향 벡터는 다음과 같이 얻을 수 있다.
에 위치한 음원에서 선배열 소나로의 전달함수, 즉 조향 벡터는 다음과 같이 얻을 수 있다.
 , (11)
, (11)
여기서  이며,
이며,  는 각주파수를 나타내고,
는 각주파수를 나타내고,  은
은  번째 센서의 시간 지연으로써 다음과 같이 계산된다.
번째 센서의 시간 지연으로써 다음과 같이 계산된다.
 , (12)
, (12)
여기서  는 음파의 전파속도를 나타낸다.
는 음파의 전파속도를 나타낸다.
3.2 회전하는 견인 선배열 소나에서의 일반화된 부엽 제거기 설계
주어진 선배열 소나 환경에서 일반화된 부엽 제거기를 설계하기 위해서는 고정된 빔형성기, 저지 행렬, 그리고 적응 빔형성기를 제어하기 위한 적응 알고리즘의 설계가 필요하다. 회전하는 견인 선배열 소나의 경우 고정된 빔형성기와 저지 행렬을 잘 설계하면, 적응 알고리즘은 일반적인 선배열 소나의 경우와 동일하게 사용할 수 있다. 따라서, 회전하는 견인 선배열 소나를 위한 일반화된 부엽 제거기를 설계하기 위해서는 ‘고정된 빔형성기’와 ‘저지 행렬’을 설계하는 것이 중요하다.
일반화된 부엽 제거기에서 고정된 빔형성기는 Eq.(4)의 제약에 의해 다음과 같이 설계될 수 있다.
 , (13)
, (13)
여기서 제약 행렬  를 구성하는 조향 벡터
를 구성하는 조향 벡터  는 Eq.(11)과 같이 회전하는 견인 선배열 소나의 모델링을 사용하여 계산되어야 한다. 저지 행렬
는 Eq.(11)과 같이 회전하는 견인 선배열 소나의 모델링을 사용하여 계산되어야 한다. 저지 행렬  는 다음 식과 같이 제약 행렬의 영공간으로 정의될 수 있다.
는 다음 식과 같이 제약 행렬의 영공간으로 정의될 수 있다.
 . (14)
. (14)
위의 식에서 행렬  는 모든 성분의 값이 0인 영행렬이다. 일반적으로 저지 행렬을 설계하기 위해서 CCD (Cascaded Column of Differencing)과 같은 기법이 널리 이용되지만,[5] 회전하는 견인 선배열 소나의 경우는 이와 같은 방법을 이용하기에 적절하지 않다. 따라서 본 논문에서는 특이값 분해 기법을 이용하여 저지 행렬을 설계한다.
는 모든 성분의 값이 0인 영행렬이다. 일반적으로 저지 행렬을 설계하기 위해서 CCD (Cascaded Column of Differencing)과 같은 기법이 널리 이용되지만,[5] 회전하는 견인 선배열 소나의 경우는 이와 같은 방법을 이용하기에 적절하지 않다. 따라서 본 논문에서는 특이값 분해 기법을 이용하여 저지 행렬을 설계한다.
특이값 분해 알고리즘을 이용하면 임의의 행렬을 다음과 같은 3개의 행렬로 분해할 수 있다.[6]
 , (15)
, (15)
여기서  는 특이값을 성분으로 가지는 대각 행렬이다. 위와 같이 분리된 행렬 값을 이용하여 다음과 같이 저지 행렬을 설계할 수 있다.
는 특이값을 성분으로 가지는 대각 행렬이다. 위와 같이 분리된 행렬 값을 이용하여 다음과 같이 저지 행렬을 설계할 수 있다.
 , (16)
, (16)
여기서  은 행렬
은 행렬  의
의  번째 열벡터로써,
번째 열벡터로써,  의 크기를 가진다.
의 크기를 가진다.
위의 설계 결과에서 각 구조를 이용하여 형성되는 최종 빔형성기 가중치는 다음과 같다.
 . (17)
. (17)
IV. 적응 빔형성기 알고리즘
앞서 언급한 바와 같이, Eq.(17)에서 저지 행렬과 고정 빔형성기는 설계 값으로 고정된 값이다. 반면 적응 가중치 벡터  는 신호 환경에 따라 적응 알고리즘을 통해 추정되어야 한다.
는 신호 환경에 따라 적응 알고리즘을 통해 추정되어야 한다.
적응 가중치 벡터를 추정하는 과정은 채널 등화기 혹은 반향 제거기 등에서 사용되는 적응 알고리즘과 매우 유사하다. 적응 가중치를 추정하기 위해서는 먼저 적응 알고리즘의 입력 신호 벡터  과 목적 신호
과 목적 신호  이 설정되어야 한다. 해당 신호들은 다음과 같이 설정된다.[4]
이 설정되어야 한다. 해당 신호들은 다음과 같이 설정된다.[4]
 . (18)
. (18)
 . (19)
. (19)
적응 가중치 벡터는 입력 신호 벡터를 이용하여 목적 신호를 가장 잘 추정하는 가중치로 추정할 수 있다. 즉, 다음의 최적화 문제를 만족하는 최적해가 원하는 가중치가 된다.
 . (20)
. (20)
위와 같은 최적화 문제의 해는 Wiener-Hopf 방정식에 의해 다음과 같이 구해진다고 알려져 있다.[1]
 , (21)
, (21)
여기서,
 , (22)
, (22)
 (23)
(23)
이다. 이러한 목적을 달성하기 위하여 SMI(Sample Matrix Inversion) 기법[7] 혹은 재귀적 최소 자숭법(Recursive Least Squares, RLS)[1]이 이용된다. SMI 기법과 RLS 기법 모두 Eqs.(22)와 (23)이 ergodic한 확률 특성을 가진다고 가정하고, 앙상블 평균  대신 시간 영역의 평균을 이용하는 기법이다. 차이가 있다면 SMI 기법의 경우 동일한 가중치의 유한한 과거 데이터를 사용하지만 RLS 기법은 지수함수적으로 감소하는 가중치를 이용하여 무한한 과거 데이터를 사용한다는 점과, SMI 기법은 역행렬 계산을 매번 반복하지만 RLS 기법은 실제 역행렬 계산을 하지 않고 이를 재귀적으로 추정한다는 점이 있다.
대신 시간 영역의 평균을 이용하는 기법이다. 차이가 있다면 SMI 기법의 경우 동일한 가중치의 유한한 과거 데이터를 사용하지만 RLS 기법은 지수함수적으로 감소하는 가중치를 이용하여 무한한 과거 데이터를 사용한다는 점과, SMI 기법은 역행렬 계산을 매번 반복하지만 RLS 기법은 실제 역행렬 계산을 하지 않고 이를 재귀적으로 추정한다는 점이 있다.
RLS 기법은 다음과 같은 일련의 계산을 통하여 적응 가중치를 추정한다.[1]
 , (24)
, (24)
 , (25)
, (25)
 , (26)
, (26)
 , (27)
, (27)
여기서  는 망각 인자로써 RLS 기법의 과거 데이터에 대한 지수함수적 가중치를 결정하는 인자이다. 전통적인 RLS 기법에서는 설계값으로 주어지며, 고정된 값을 갖는다.
는 망각 인자로써 RLS 기법의 과거 데이터에 대한 지수함수적 가중치를 결정하는 인자이다. 전통적인 RLS 기법에서는 설계값으로 주어지며, 고정된 값을 갖는다.
한편, 위의 망각 인자를 신호 환경에 따라 적응적으로 변화시키게 되면 보다 가혹한 신호 환경에 대해 강인한 알고리즘을 얻을 수 있으며, 이는 근래의 연구에 의해 알려진 바이다.[8,9] 단 망각 인자의 자가-조율 알고리즘의 연산복잡도가 높은 단점이 있으나, 최근에 연구된 자가-조율 알고리즘의 경우 행렬 연산을 없앰으로써 다음과 같이 비교적 적은 연산량으로 이를 근사할 수 있다.[9]
 , (28)
, (28)
 , (29)
, (29)
 , (30)
, (30)
 . (31)
. (31)
위의 식들을 이용하면, Eqs. (25)와 (27)의 망각인자  는 n 단계마다 자가조율이 되며, 이 때 각
는 n 단계마다 자가조율이 되며, 이 때 각  값으로는 갱신되기 전 값, 즉
값으로는 갱신되기 전 값, 즉  의 값으로 표현이 가능하다. 또한 초기값은
의 값으로 표현이 가능하다. 또한 초기값은  으로 주어지며, 일반적으로 1에 가까운 초기값을 가진다.
으로 주어지며, 일반적으로 1에 가까운 초기값을 가진다.
V. 시뮬레이션
5.1 시뮬레이션 시나리오
본 논문에서는 Fig. 3과 같이 TASS 예인함이 잠수함을 추적하는 과정에서 회전하는 상황을 가정하여 시뮬레이션을 수행하였다. 본 시뮬레이션에서 타겟 잠수함은 TASS 대비 북쪽으로 5 km 떨어진 곳에 위치하고 있으며, TASS 예인함은 회전하여 북상하는 상황을 가정하였다. 이 때 2 개의 재머가 TASS 예인함 대비 4.5 km 북쪽에서 작동하는 상황이며, 재머가 작동하기 시작하는 1 s간 적응 빔형성기가 재머 간섭 신호를 제거하여 신호대간섭잡음비(Signal-to-Interference- and-Noise Ratio, SINR)를 확보하는 성능을 시험하였다.
배의 속도는 15 knot, 잠수함의 속도는 10 knot로 가정하였으며, TASS의 센서 개수는 32개, 센서간 간격은 1.875 m이다. 이는 400 Hz 음향신호에 해당하는 배열이며, 빔형성기 또한 이에 해당하는 협대역 빔형성기로 동작하는 상황을 가정하였다.
원하는 신호의 입력 신호대잡음비는 0 dB로, 재머 신호의 신호대잡음비는 30 dB로 설정하였다. 따라서 재머 신호는 원하는 신호 대비 30 dB가 큰 백색잡음이며, 빔형성기에 입사될 때에는 목적 주파수인 400 Hz 주변의 대역만 통과되도록 하였다. Fig. 3의 좌측 재머는 시뮬레이션 시작 후 0.2 s 후에 작동하도록 설정하였고, 우측 재머는 0.4 s 후에 작동하도록 설정하였다.
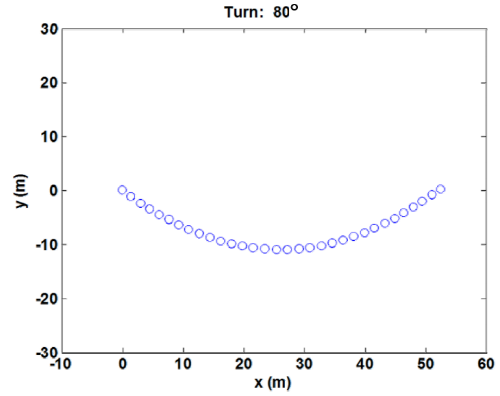
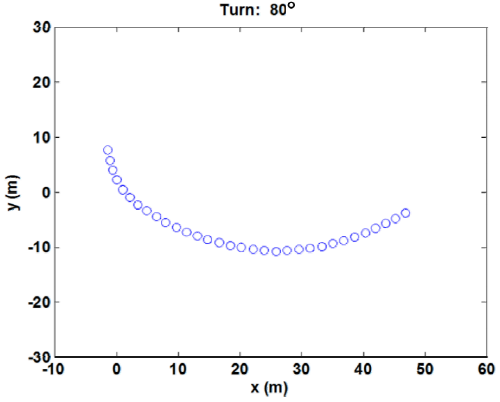
|
Fig. 4. Sensor locations of the TASS (initialization). |
|
Fig. 5. Sensor locations of the TASS (end of the simulation). |
5.2 시뮬레이션 설정
일반화된 부엽 제거기의 적응 알고리즘은 SMI, RLS, 그리고 자가-조율 RLS 알고리즘을 비교하였다. SMI 알고리즘의 데이터 창 길이는 50으로 설정하였고, RLS 알고리즘의 망각 인자의 값은 0.99로 설정하였다. 자가-조율 RLS 알고리즘의 경우 초기 망각 인자 값을 0.99로, 학습 속도 인자 값을  로 설정하였다. 각 적응 가중치의 갱신 및 SINR을 계산하는 스냅샷은 1 ms 마다 한번 씩 수행하였다. TASS의 변침 각도는 20°, 50°, 80°로 설정하여 각 경우에 대한 시뮬레이션을 수행하였다.
로 설정하였다. 각 적응 가중치의 갱신 및 SINR을 계산하는 스냅샷은 1 ms 마다 한번 씩 수행하였다. TASS의 변침 각도는 20°, 50°, 80°로 설정하여 각 경우에 대한 시뮬레이션을 수행하였다.
성능 지표로는 다음과 같은 SINR 값을 사용하였다.[4] 이는 간섭 및 잡음 신호에 대한 원하는 신호의 에너지 비율로써, 높을수록 좋은 성능을 나타낸다.
 , (32)
, (32)
여기서  은 센서 배열에 입사된 원하는 신호 성분을 의미하며,
은 센서 배열에 입사된 원하는 신호 성분을 의미하며,  은 입사된 간섭 신호와 잡음 성분을 의미한다. 위의 성능 지표를 가지고 시뮬레이션을 50회 반복 수행하였으며, 이에 대한 앙상블 평균값을 취하여 성능 지표로 도시하였다.
은 입사된 간섭 신호와 잡음 성분을 의미한다. 위의 성능 지표를 가지고 시뮬레이션을 50회 반복 수행하였으며, 이에 대한 앙상블 평균값을 취하여 성능 지표로 도시하였다.
5.3 시뮬레이션 결과
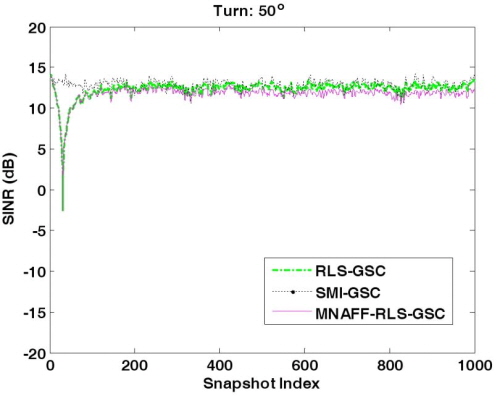
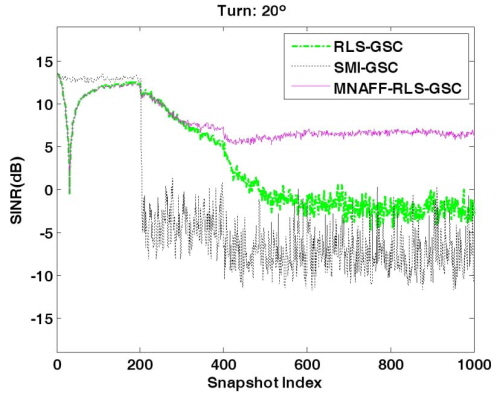
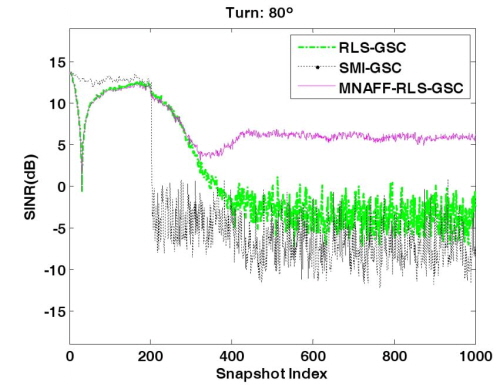
Figs. 6~11까지의 그래프에 시뮬레이션 결과가 도시되어 있다. 각 그래프에서 가로축은 시간의 경과를, 세로축은 SINR 성능 지표의 값을 나타낸다. 파선은 SMI의 성능 결과를, 쇄선은 고전적인 RLS 알고리즘을 사용한 결과를, 실선은 자가-조율 RLS 알고리즘을 사용한 결과를 나타낸다. 각 적응 알고리즘들은 일반화된 부엽 제거기 구조에서 적응 가중치를 조절하는 부분에 사용되었다.
Fig. 6은 재머가 동작하지 않는 상황에서 50° 각도로 변침할 때, 포물선 모델이 아닌 고전적인 직선 모델을 적용하였을 때의 결과이다. 이 때 적응 알고리즘들이 적응에 실패하여 신호대잡음비를 확보하지 못하는 것을 볼 수 있다. 반면, Fig. 7은 동일한 상황에서 포물선 모델을 이용한 경우의 성능을 도시하고 있으며, 이를 통하여 본 논문에서 적용한 포물선 모델이 회전하는 TASS에서 빔을 형성하는 데에 효과적임을 알 수 있다.
Figs. 8과 9는 50°의 변침 각도를 가지고 운용할 때에 재머가 동작하는 시나리오에 대한 결과를 보여주고 있다. 재머의 작동 시점은 각각 snapshot index가 200, 400 일 때 이며, Fig. 8은 포물선 모델을 적용하지 않은 결과를, Fig. 9는 포물선 모델을 적용한 결과를 보여준다. 포물선 모델을 적용하지 않은 상황에서는 모든 알고리즘이 효과적으로 간섭 및 잡음 신호를 제거하지 못하고 있음을 알 수 있으며, 자가-조율 알고리즘의 경우 상대적으로 성능 저하가 적지만, 성능 지표의 값이 낮아서 큰 의미는 없다.
포물선 모델을 적용한 경우 재머 작동 전에는 Fig. 7과 마찬가지로 효과적으로 빔을 형성하고 있음을 확인할 수 있다. 재머가 동작한 이후에는 각 알고리즘의 성능이 저하됨을 확인할 수 있으며, 적응 알고리즘의 종류에 따라 성능이 다르게 나타나게 된다. 적응 알고리즘의 성능이 Figs. 6과 7에 비하여 성능이 저하되거나 혹은 성능 향상이 크지 않다고 느껴질 수 있으나, 실제로는 Figs. 8 ~ 11의 경우 입력 SINR이 30 dB 이상 낮은 상황이기 때문에 각 적응 알고리즘들이 어느 정도 간섭 신호를 제거하고 있는 상황이라고 판단된다.
|
Fig. 6. Simulation result without applying the parabolic TASS model when no jammer was activated. |
|
Fig. 7. Simulation result with applying the parabolic TASS model when no jammer was activated. |
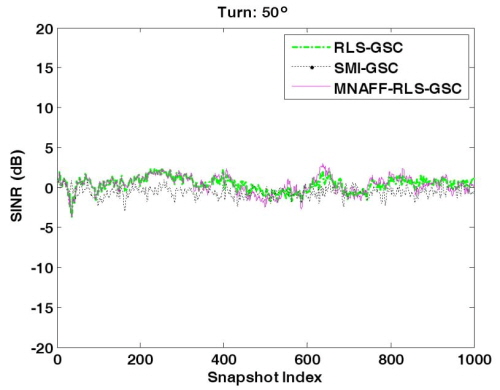
|
Fig. 8. Simulation result without applying the parabolic TASS model when 2 jammers were activated. |
|
Fig. 9. Simulation result with applying the parabolic TASS model when 2 jammers were activated. |
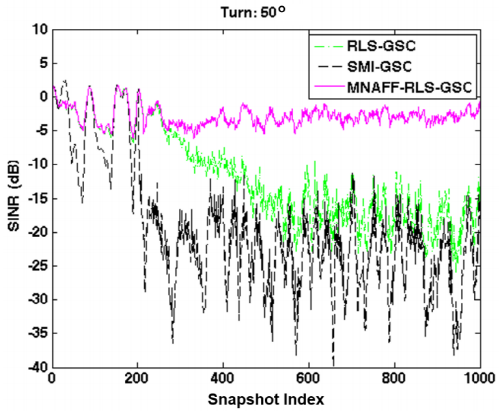
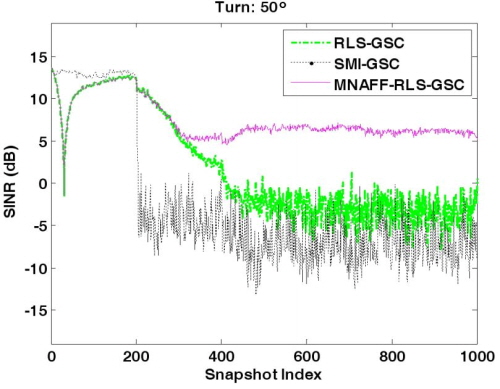
SMI 알고리즘의 경우 재머가 동작한 이후에 바로 성능이 감소되며, 고전적인 RLS 알고리즘은 이보다 나은 결과를 보이지만 성능 저하에서 회복되지는 못한다. 이는 TASS 운용 과정에서 어레이의 형태가 흐트러지기 때문에 나타나는 현상이라고 해석된다. 이 경우 Fig. 7의 결과에서는 어레이의 형태가 흐트러져도 문제없이 적응이 잘 된 반면, Fig. 9의 결과에서는 어레이의 형태가 흐트러지는 문제에 의한 성능 저하가 일어나는 이유에 대해 의문이 발생할 수 있다. 이는 Fig. 7의 빔형성 문제와 Fig. 9의 빔형성 문제가 서로 상이하다는 점에서 설명될 수 있다. 즉, Fig. 7의 경우 간섭 신호가 존재하지 않고 배경 잡음만 존재하기 때문에, 효과적인 빔 형성을 위해서는 부엽의 에너지를 전체적으로 낮추면 된다. 반면, Fig. 9의 경우는 특정 방향에서 간섭 신호가 강하게 발생하기 때문에, 적응 빔형성기는 이를 제거하기 위하여 특정 방향에 골을 형성해야 한다. 일반적으로 빔 응답에 나타나는 골은 매우 폭이 좁기 때문에, 적응 과정에서 어레이의 형태가 흐트러지는 문제가 이러한 적응 과정을 방해할 수 있다.
반면, 자가-조율 RLS 알고리즘의 경우 망각인자를 조절하여 이러한 오차 영역의 피해를 최소화할 수 있다. Fig. 8의 결과를 보면 이러한 특성에 의해 자가-조율 RLS 알고리즘은 성능 저하에서 회복하여 일정 수준의 성능을 확보함을 확인할 수 있다.
Figs. 10과 11은 Fig. 9와 동일한 조건에서 변침 각도만 다르게 설정한 결과이다. 각 결과를 보면 변침 각도가 증가할수록 재머 동작 이후의 성능 저하 수준이 부분적으로 다르게 나타나며, 변침 각도가 클수록 성능 저하가 더 빠르게 일어나는 경향을 보인다. 그러나 전체적인 경향에는 큰 차이가 없으며, 여러 변침 각도의 경우에 대해 유사한 성능을 보이고 있음을 확인할 수 있다. 특히, Figs. 4와 5를 보면 TASS 예인함이 이동하는 과정에서 TASS의 형태가 정확한 포물선을 그리지 못함에도 불구하고 이러한 오차에 강인한 성능을 보임을 확인할 수 있다.
VI. 결 론
본 논문에서는 회전하는 견인 선배열 소나에 대하여 일반화된 부엽 제거기 구조를 이용하여 적응 빔형성기를 설계하였다. 일반화된 부엽 제거기의 고정 부분을 설계하기 위하여 포물선 형태의 견인 선배열 소나 모델링을 적용하여 설계하였으며, 적응 가중치를 조절하기 위하여 자가-조율 RLS 기법을 적용하였다.
견인 선배열 소나의 예인함이 회전하며 목표물을 추적하는 과정을 가정하여 시뮬레이션을 수행하고, 이 과정에서 재머 동작에 대한 적응 빔형성기의 성능을 분석하였다. 시뮬레이션 결과 분석을 통해 적응 빔형성기의 설계에 있어서 포물선 모델의 효과와, 자가-조율 RLS 알고리즘의 효과를 검증할 수 있었다.
