

I. 서 론
II. DIFAR센서 좌/우 구분
2.1 DIFAR센서 구조 및 신호모델
2.2 DIFAR센서 카디오이드 빔형성
III. 지향성배열센서 구조 및 신호처리
3.1 지향성배열센서 구조
3.2 지향성 배열센서 신호처리
IV. 좌/우 구분 모의실험
V. 실해역시험 결과 분석
VI. 결 론
I. 서 론
수중환경에서 음원이 방사한 음향신호를 탐지하기 위해 선배열센서를 이용한 방법들이 연구되었다.[1] 일반적으로 선배열센서는 빔형성을 통해 조향방위에서의 배열이득을 확보하고 해당 방위에서 수신되는 음향신호의 신호 대 잡음비(Signal to Noise Ratio, SNR)를 향상시키는 공간필터링을 통해 음원을 탐지한다.[1,2] 따라서 선배열센서는 낮은 신호 대 잡음비를 가지는 원거리 음원의 탐지가 가능한 장점이 있다. 하지만 선배열센서의 구조적인 특성상 음원의 방향이 방위각과 고각으로 구분되지 않고 원추각 형태로 결정되어 수평 방향으로의 좌/우 구분 모호성이 발생한다. 이러한 선배열센서의 좌/우 구분 모호성을 해결하기 위한 방법으로 카디오이드(cardioid) 빔형성 기반 다중 선배열센서에 대한 연구가 진행되어 왔다.[3,4]
카디오이드 빔형성 기법을 이용한 좌/우 구분은 2개의 독립된 센서가 일직선으로 배치되는 경우 적용 가능하다. 음원의 위치가 상대적으로 원거리에 있는 경우 제한된 깊이를 갖는 해양에서 수직 방향 모호성은 무시할 수 있으며, 원거리로부터 발산하는 음파의 경로는 수평에 가까운 형태로 도달함을 가정할 수 있다. 이에 따라 이중 선배열센서는 2개의 선배열을 평행하게 배치하여 수평 방향으로 발생하는 좌/우 구분 모호성을 해결할 수 있다.[5]
이중 선배열센서와 같이 2개 이상의 센서를 이용한 카디오이드 빔형성은 센서 간격과 수신된 음파의 파장에 따라 빔패턴이 변경되며, 이에 따라 좌/우 구분 성능 및 탐지 성능이 변경된다. 일반적인 카디오이드 빔형성은 조향방위 반대 방위에서의 지향이득을 억제하도록 조향한다.[6] 하지만 센서 간격에 비해 음파의 파장이 긴 경우, 조향방위에서의 지향이득 감소로 인해 낮은 신호 대 잡음비를 가지는 원거리 음원의 탐지가 불가하다. 이와는 반대로 조향방위에서의 지향이득을 향상시키도록 조향할 수 있으나, 긴 파장을 가지는 저주파 대역에서 반대방위의 지향이득이 증가하여 좌/우 구분 성능 저하가 발생한다. 이러한 센서 간격과 음파의 파장 간의 관계에 따라 이중 선배열센서의 성능 저하는 선배열 간 간격을 넓힘으로써 일부 해결할 수 있으나, 간격이 넓은 이중 선배열센서는 제작/운용의 어려움이 수반된다. 따라서 카디오이드 빔형성 기반 다중 선배열센서는 음파의 파장이 긴 저주파 대역 처리에는 적합하지 않다.
카디오이드 빔형성은 다중 선배열센서뿐만 아니라 단일 벡터센서에도 적용 가능하며, 벡터센서 기반 선배열센서에 대한 연구가 활발히 진행되어 왔다.[7,8] 일반적인 벡터센서는 무지향성 채널과 3개의 지향성 채널로 구성되며, 카디오이드 빔형성을 통해 수평/수직 방향의 모호성 해결이 가능하다. 단, 벡터센서의 경우 저주파 대역에서의 수신감도 저하 및 자체잡음으로 인해 탐지대역이 제한된다.
DIFAR(Directional Frequency Analysis and Recording)센서는 벡터센서의 일종으로 무지향성 채널과 2개의 지향성 채널로 구성되며,[9-11] 이에 따라 수평 방향의 모호성 해결이 가능하다. 또한 저주파 대역(20 Hz ~ 2400 Hz)에서 탐지가 가능함에 따라 저주파 대역 수동 선배열센서에 적용 가능하다.
이에 따라 본 논문에서는 저주파 대역 음원에 적용 가능하고 선배열센서의 좌/우 구분 모호성을 해결하기 위한 방안으로 DIFAR센서를 이용한 지향성배열센서 구조 및 신호처리를 제안하였다. 지향성배열센서는 기존 음향배열센서에 지향성을 가지는 DIFAR배열센서를 추가 확장한 구조이다. 지향성배열센서 신호처리는 음향배열센서의 빔형성 결과와 DIFAR배열센서의 빔형성 결과를 융합/처리하는 구조이며, 카디오이드 빔형성과 지연합 빔형성으로 구성된 DIFAR배열센서의 2단계 빔형성을 통해 좌/우 구분 가능하다. 제안한 지향성배열센서는 모의실험을 통해 저주파 대역에서의 좌/우 구분 성능을 검증하였으며, 이중 선배열센서와의 좌/우 구분 성능을 비교/분석하였다.
II. DIFAR센서 좌/우 구분
DIFAR센서는 DIFAR소노부이에 탑재되어 항공기에서 수중에 투하된 후, 수중음원의 음향신호를 획득하여 음원의 방위각을 추정하는 용도로 사용된다. 이때, 음원의 방위각은 DIFAR센서의 구조 및 신호처리에 따라 좌/우 구분 모호성이 발생하지 않으며, 전방위에 대한 방위각 추정이 가능하다.
2.1 DIFAR센서 구조 및 신호모델
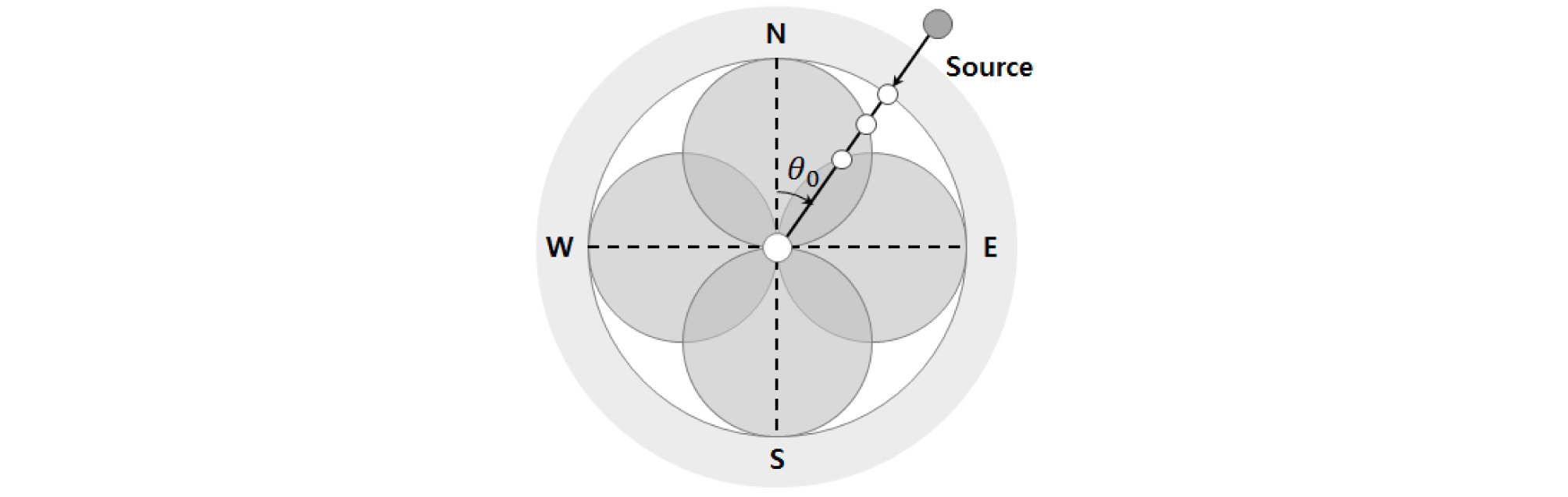
DIFAR센서는 수중음원의 방위를 추정하기 위해 3개의 채널을 사용하며, 무지향성 채널(omni)과 2개의 지향성 채널(east/west, north/south)로 구성된다. Fig. 1은 DIFAR센서 채널의 방위별 수신특성을 나타내며, 전방위에서 균일한 가중치를 나타내는 무지향성 신호와 방위에 따라 동서(EW)와 북남(NS) 방향으로 sine과 cosine 가중치를 나타내는 2개의 쌍극자(dipole) 형태의 지향성 신호로 나타난다.[11] 이때, 채널별 출력신호는 다음과 같다.
 (1)
(1)
s(t)는 음원이 방사한 음향신호, w0는 음원 방위 θ0에 따른 Omni, EW, NS 채널의 가중벡터이며, Eq. (2)와 같다.
 (2)
(2)
여기서 T는 전치행렬을 의미한다.
2.2 DIFAR센서 카디오이드 빔형성
DIFAR센서 출력신호는 Eq. (2)와 삼각함수를 적용하여 다음의 관계가 성립함을 알 수 있다.
 (3)
(3)
Eq. (3)에 의해 Eq. (4)의 조향방위 θ에 대한 조향벡터 w(θ)에 따른 카디오이드 빔출력은 Eq. (5)와 같이 나타난다.
 (4)
(4)
 (5)
(5)
Fig. 2는 Eq. (5)에 따라 음원 방위 θ0가 90°인 경우의 빔패턴을 나타낸다. Eq. (5)에서  는 카디오이드 빔형성에 따른 지향이득을 나타낸다. 이때 조향방위 θ가 음원 방위 θ0와 일치하는 경우 2배가 되며, 조향방위 반대방위(θ+180°)와 일치하는 경우 0이 되어 Null이 발생한다. 나머지 방위에서는 에 따라 감소한다.
는 카디오이드 빔형성에 따른 지향이득을 나타낸다. 이때 조향방위 θ가 음원 방위 θ0와 일치하는 경우 2배가 되며, 조향방위 반대방위(θ+180°)와 일치하는 경우 0이 되어 Null이 발생한다. 나머지 방위에서는 에 따라 감소한다.
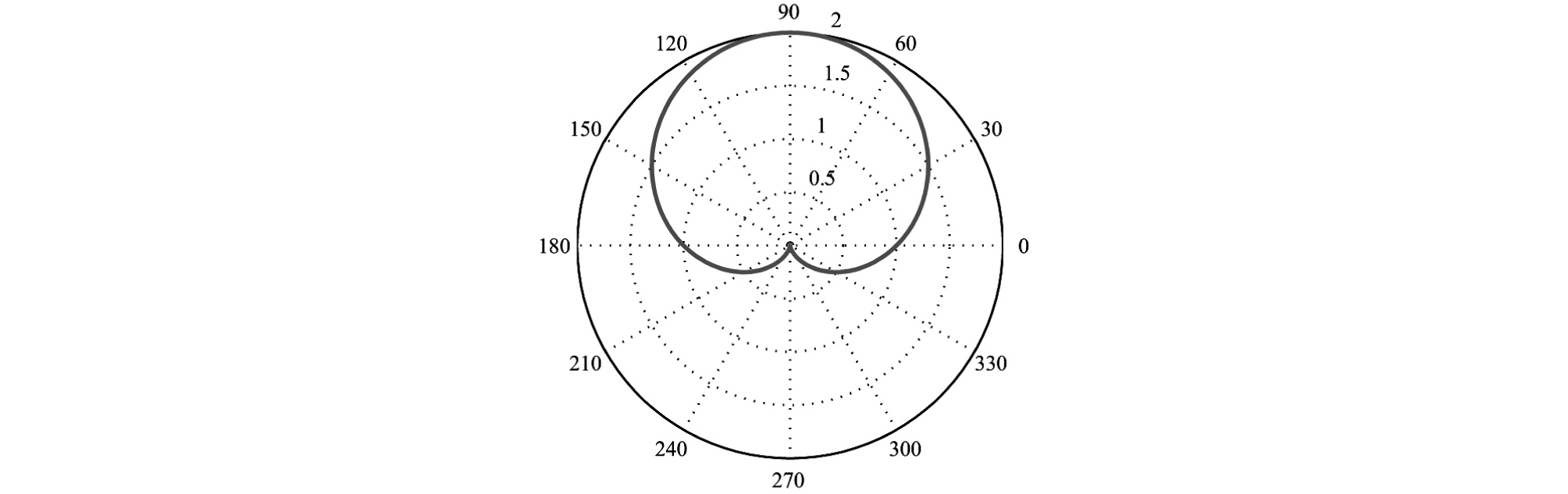
그 결과, DIFAR센서의 카디오이드 빔형성은 최대 음압 감지축(Maximum Response Axis, MRA)에 의해 최대 출력을 나타내는 방위(θ = θ0)를 탐지/추정하며, 좌/우 구분 모호성이 발생하지 않는다.
III. 지향성배열센서 구조 및 신호처리
본 논문에서는 저주파 대역에서 좌/우 구분을 해결하기 위한 방안으로 DIFAR센서를 이용한 지향성배열센서를 제안한다.
3.1 지향성배열센서 구조
지향성배열센서는 기존 음향배열센서에 지향성을 가지는 DIFAR배열센서를 추가 확장한 구조이다. 이에 따라 지향성배열센서는 기 개발된 음향센서와 DIFAR센서를 조합하여 제작 가능하고, 기존 단일 선배열센서에 DIFAR배열센서를 추가 확장하여 좌/우 구분 모호성을 해결할 수 있다. 또한 해당 구조는 주파수 감소에 따른 센서 직경 증가가 없어 기존 이중 선배열센서 대비 제작/운용이 용이하다.
Fig. 3은 지향성배열센서가 원거리 음원으로부터 신호를 수신하는 형태를 나타낸다. 여기서 지향성배열센서는 음향센서 MA개와 DIFAR센서 MD개가 등간격으로 배치된 형태이며, d는 설계주파수 fd와 음속 c에 따른 센서 간격(=c/2fd)이다. 음원의 방위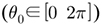 는 음향배열센서 헤딩을 기준으로 시계 방향이며, 배열의 중심에서부터 측정된다.
는 음향배열센서 헤딩을 기준으로 시계 방향이며, 배열의 중심에서부터 측정된다.
 (6)
(6)
 (7)
(7)
Eq. (6)은 음향배열센서에서 mA번째 음향센서 출력신호를 나타내며, Eq. (7)은 DIFAR배열센서에서 mD번째 DIFAR센서 출력신호를 나타낸다.
여기서 mA = 1, 2, …, MA, mD = 1, 2, …, MD, n = 1, 2, …, N이며, MA는 음향센서 개수, MD는 DIFAR센서 개수, N은 음원의 개수이다. sn(t)는 n번째 음원의 신호, eA(t), eD(t)는 음향센서와 DIFAR센서에 수신되는 백색 가우시안 잡음(white Gaussian noise)이다. wn은 n번째 음원의 방위 θn에 따른 DIFAR센서 Omni, EW, NS 채널의 가중벡터이며, T는 전치행렬을 의미한다.
 (8)
(8)
또한 τA (mA, n)와 τD (mD, n)는 각각 mA번째 음향센서와 mD번째 DIFAR센서에서 n번째 음원과의 시간지연을 의미하며, 다음과 같이 나타난다.
 (9)
(9)
 (10)
(10)
Eqs. (9)와 (10)에서 rAmA, rDmD는 mA번째 음향센서와 mD번째 DIFAR센서의 위치벡터이며. un은 n번째 음원 방위 θn에 따른 위치벡터로 다음과 같다.
 (11)
(11)
3.2 지향성 배열센서 신호처리
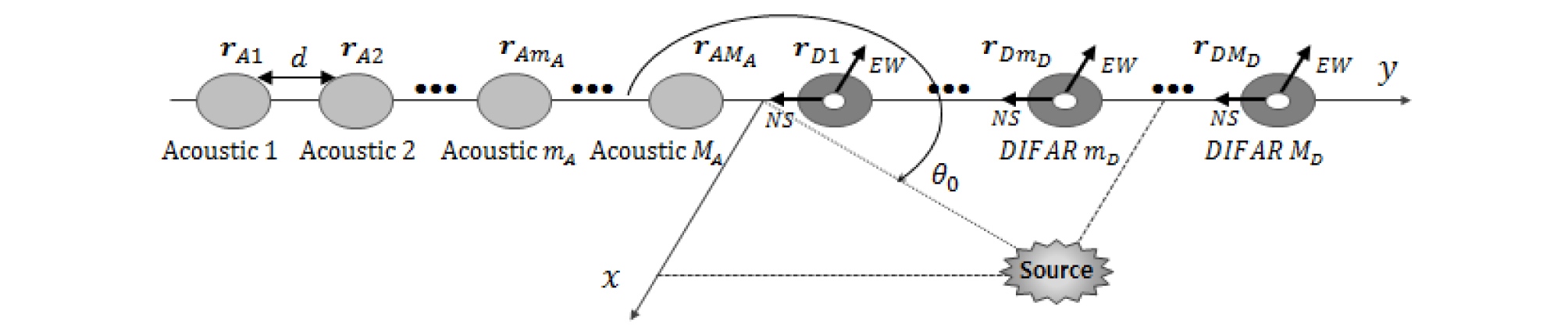
지향성배열센서 신호처리는 Fig. 4와 같이 음향배열센서의 빔형성 결과와 DIFAR배열센서의 빔형성 결과를 융합/처리하는 구조이며, 카디오이드 빔형성과 지연합 빔형성으로 구성된 DIFAR배열센서의 2단계 빔형성을 통해 좌/우 구분 가능하다.
Fig. 4에 제시된 단계별 신호처리는 다음과 같다.
Step. 1 개별 DIFAR센서에 대한 카디오이드 빔형성을 수행한다.
일반적으로 선배열센서의 카디오이드 빔형성은 선배열센서 기준 좌/우에 해당하는 90°(= π/2)와 270°(=3π/2)에서 수행한다. 이는 좌/우 구분 모호성이 발생하는 허위 방위와 카디오이드 빔형성의 Null 방위 차이가 커짐에 따라 좌/우 구분 성능이 저하되므로, 90°/270° 조향이 방위별 조향보다 높은 좌/우 구분 성능을 나타내기 때문이다.
Eqs. (4), (5), (8)에 따라 DIFAR센서별 90°와 270° 카디오이드 빔데이터는 다음과 같다.
 (12)
(12)
 (13)
(13)
Step. 2 음향배열센서의 지연합 빔형성과 DIFAR배열센서 90° / 270° 빔데이터의 지연합 빔형성을 수행하며, 빔데이터는 다음과 같다.
 (14)
(14)
Eq. (14)는 음향배열센서 지연합 빔데이터이며, 조향방위  이다.
이다.
 (15)
(15)
Eq. (15)는 DIFAR배열센서 지연합 빔데이터이며, 조향방위  이다.
이다.
Step. 3 방위별 빔데이터에 대한 FFT(Fast Fourier Transform)를 수행하여 음향배열센서 빔스펙트럼 BA (θA, f)와 DIFAR센서 빔스펙트럼 BD (θD, f)을 산출한다.
Step. 4 빔스펙트럼 융합을 통해 좌/우 구분된 지향성배열센서 빔출력을 Eq. (16)과 같이 산출한다.
 (16)
(16)
여기서 w(θ,f)는 전역 가중함수를 나타낸다.
IV. 좌/우 구분 모의실험
지향성배열센서의 좌/우 구분 성능 확인을 위해 모의실험을 수행하였으며, 이중 선배열센서의 좌/우 구분 성능과 비교/분석하였다. 좌/우 구분 성능은 PSRR(Port-Starboard Rejection Ratio)를 이용하여 판단하였으며, PSRR은 음원 방위와 허위 방위 간의 신호 대 잡음비 차이를 나타낸다.[12]
모의실험을 위해 지향성배열센서는 음향센서 32개와 DIFAR센서 8개를 설계주파수 400 Hz에 따른1.875 m씩 등간격으로 배치하였다. 이중 선배열센서는 개별 선배열당 32개(총 64개)를 1.875 m씩 등간격으로 배치하였으며, 선배열 간 간격은 0.234 m로 센서 간격의 1/8배를 적용하였다.
Fig. 5는 신호 대 잡음비가 -5 dB, 주파수 400 Hz에서 음원 방위별 빔출력을 나타낸다. 진한 실선은 지향성배열센서, 연한 실선은 이중 선배열센서, 수직 점선은 음원 방위와 좌/우 구분 모호성에 따른 허위 방위를 나타낸다. 이때, 이중 선배열센서는 음원 방위의 준위는 낮으나 허위 방위에서의 신호성분을 억제함에 따라 PSRR은 90°에서 4.7dB, 120°에서 4.3 dB를 나타내며, 지향성배열센서는 음원 방위에서의 준위는 높으나 허위 방위에서의 신호성분이 출력됨에 따라 PSRR은 90°에서 4.8 dB, 120°에서 4.7 dB로 유사한 좌/우 구분 성능을 나타냈다.
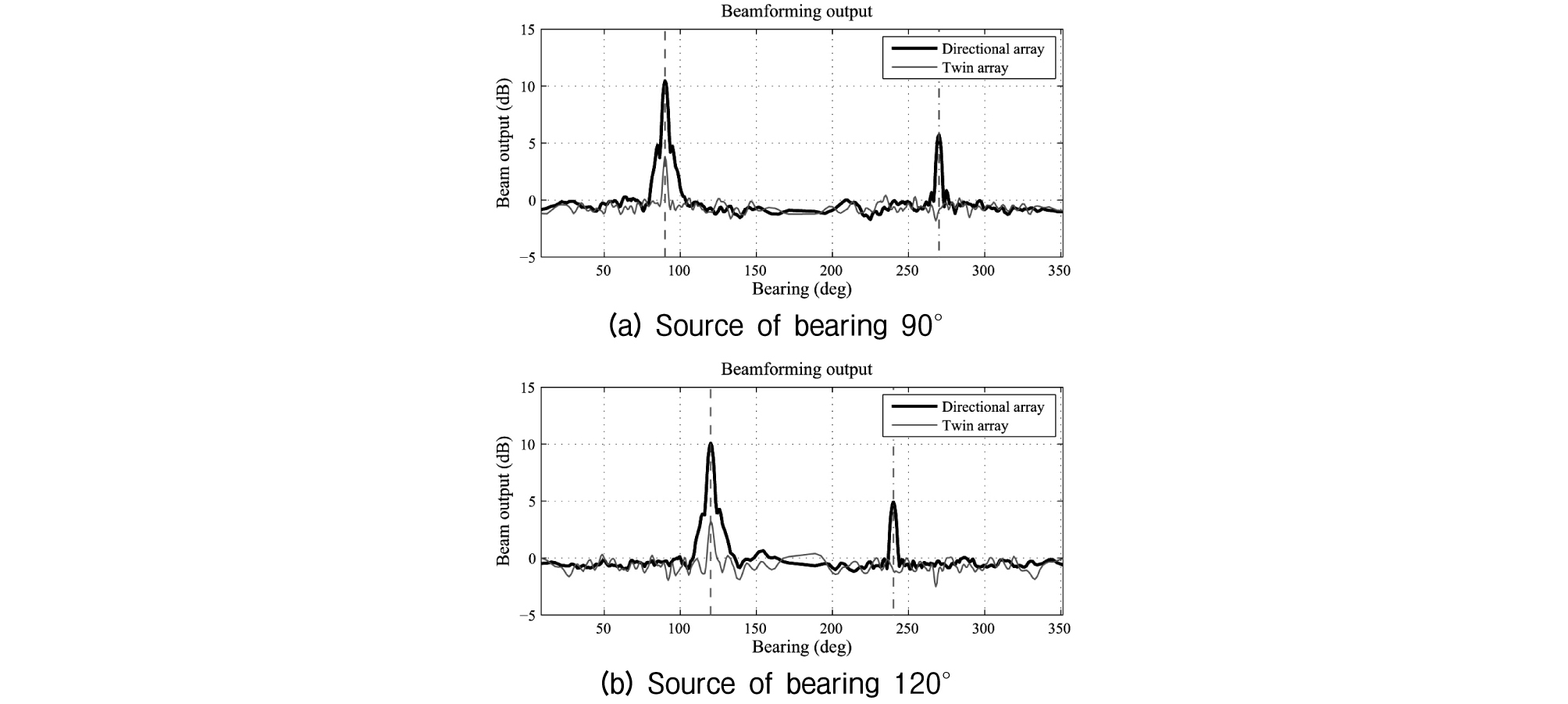
Fig. 6은 음원 방위가 90°, 신호 대 잡음비 –5 dB에서 주파수별 빔출력을 나타낸다. 지향성배열센서는 Fig. 5(a)와 비교하여 주파수 감소에 따라 빔폭이 증가하나 PSRR은 200 Hz에서 5.1 dB, 100 Hz에서 5.2 dB로 좌/우 구분 성능을 유지하는 반면, 이중선배열센서는 음원 방위에서의 탐지준위가 급격히 감소하여 탐지가 불가하며, PSRR은 200Hz에서 0.9dB, 100Hz에서 0.7 dB로 좌/우 구분이 불가함을 확인할 수 있다. 이는 앞서 언급한 바와 같이 주파수 감소 시 DIFAR센서의 카디오이드 빔형성은 지향이득을 유지하나, 이중 선배열센서의 카디오이드 빔형성 지향이득이 급격히 감소하기 때문이다.
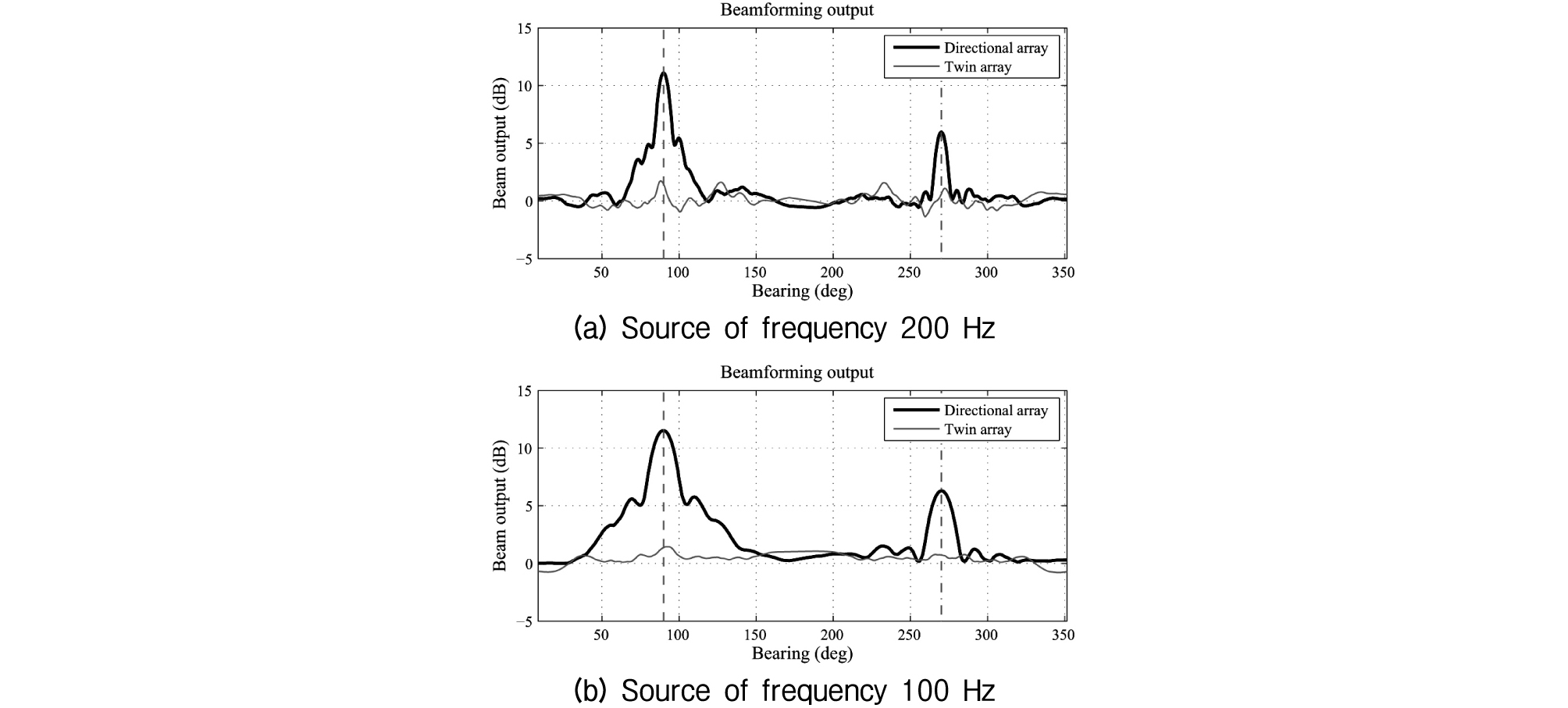
Fig. 7은 음원 방위, 신호 대 잡음비, 주파수의 변화에 따른 좌/우 구분 성능을 확인하기 위해 음원 방위 90°, 120°, 150°에서 신호 대 잡음비와 주파수의 변화에 따라 Monte-Carlo 100회 수행을 통해 PSRR을 산출한 결과이다. 실선은 지향성배열센서, 점선은 이중 선배열센서를 나타낸다.
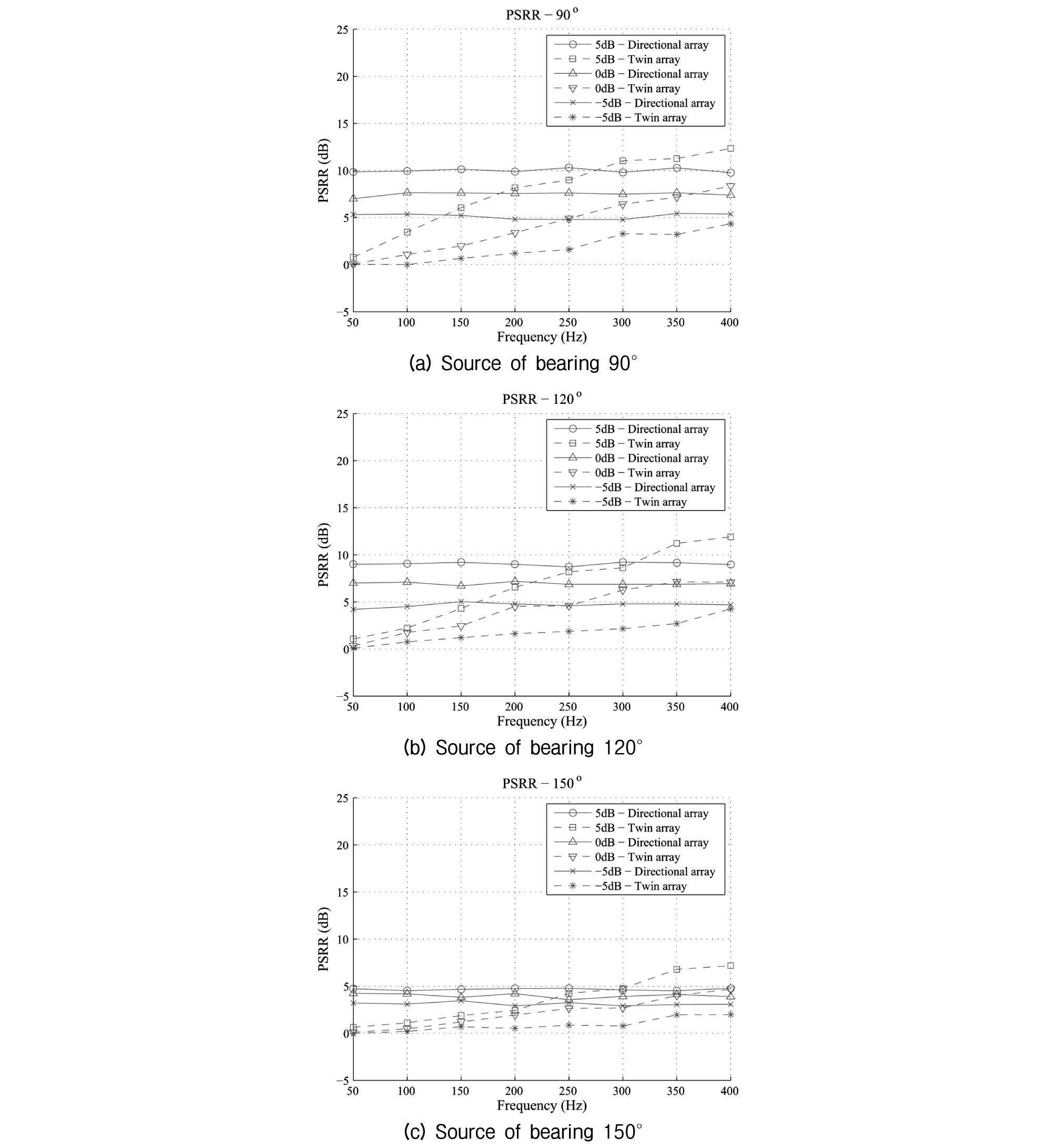
음원 방위별 분석 결과, 음원 방위가 90°에서 150° 방향으로 접근함에 따라 지향성배열센서와 이중 선배열센서의 좌/우 구분 성능이 감소한다. 이는 Eq. (5)에 따라 좌/우 구분을 위한 카디오이드 빔형성에서 Null이 발생하는 방위(θ+180°)와 배열센서에서 좌/우 구분 모호성이 발생하는 방위(360°-θ)가 일치하는 90°에서 가장 높은 좌/우 구분 성능을 나타내며, 180° 또는 0° 방향으로 접근할수록 카디오이드 빔형성의 좌/우 구분 성능이 저하되기 때문이다.
음원 신호 대 잡음비와 주파수별 분석 결과, Fig. 7 (a), (b), (c)에서 신호 대 잡음비가 0 dB보다 크고 주파수가 300 Hz보다 큰 일부 구간에서 이중 선배열센서가 지향성배열센서보다 높은 좌/우 구분 성능을 나타낸다. 하지만 앞서 언급한 바와 같이 이중 선배열센서는 주파수가 감소함에 따라 좌/우 구분 성능이 급격히 저하된다. 또한 주파수가 150 Hz 이하인 구간에서 신호 대 잡음비 5 dB인 이중 선배열센서 PSRR이 신호 대 잡음비 -5 dB인 지향성배열센서 PSRR보다 작거나 비슷한 수준으로 좌/우 구분 성능이 저하됨을 확인할 수 있다. 반면 지향성배열센서는 음원 방위별 전주파수 대역에서 균일한 좌/우 구분 성능을 나타내며, 신호 대 잡음비 –5 dB에서 음원 방위 90°는 평균 PSRR 5.15 dB, 음원 방위 120°는 평균 PSRR 4.67 dB, 음원 방위 150°는 평균 PSRR 3.12 dB로 출력됨에 따라 낮은 신호 대 잡음비 및 저주파수 대역에서 좌/우 구분이 가능하다.
따라서 제안한 지향성배열센서는 기존 이중 선배열센서의 성능 저하를 개선하여 저주파 대역, 원거리 음원에 대한 탐지 및 좌/우 구분이 가능함을 확인할 수 있다.
V. 실해역시험 결과 분석
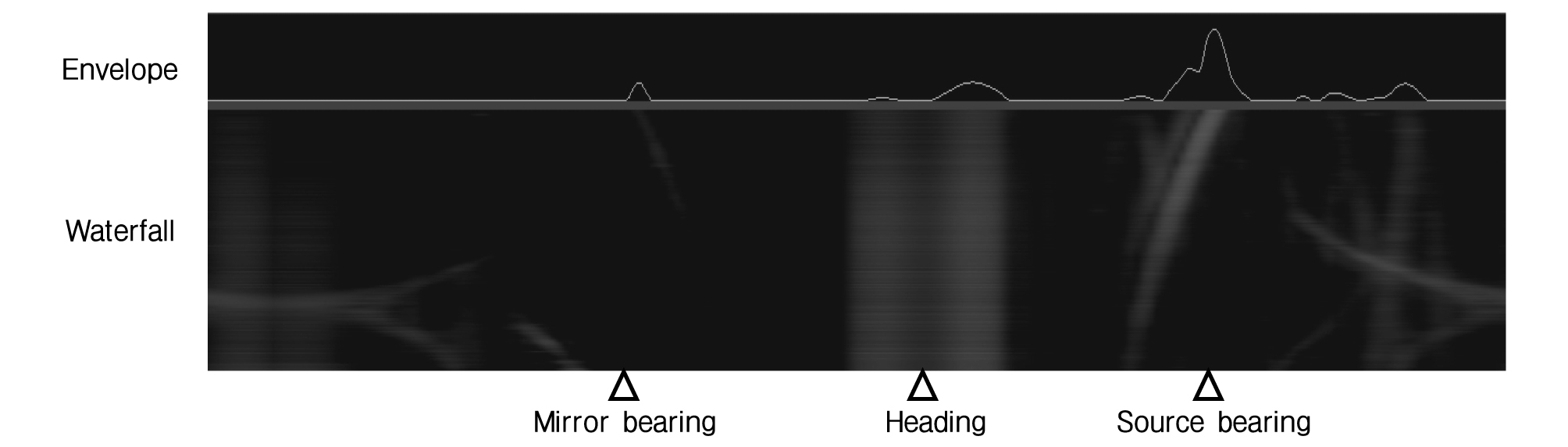
지향성배열센서의 좌/우 구분 성능을 검증하기 위해 실해역시험을 수행하였으며, Fig. 3에 제시된 구조를 기반으로 음향센서 32개와 DIFAR센서 8개를 적용하였다. Fig. 8은 지향성배열센서에서 수집한 실해역데이터를 신호처리한 결과이다. envelope과 waterfall에서 각각 지향성배열센서의 헤딩을 기준으로 음원 방위와 허위 방위가 좌/우 대칭으로 나타나며, 음원 방위의 준위가 허위 방위 준위보다 높게 출력된다. 이를 통해 제안한 지향성배열센서 구조 및 신호처리가 실제 해양환경에서 적용 가능하며, 좌/우 구분 가능함을 확인할 수 있다.
VI. 결론
본 논문에서는 저주파 대역에서 좌/우 구분이 가능한 지향성배열센서 구조 및 신호처리를 제안하였으며, 모의실험과 실해역 시험을 통해 검증하였다. 모의실험에서는 기존 이중 선배열센서의 성능 저하를 개선하여 낮은 신호 대 잡음비 및 저주파 대역에서 음원에 대한 탐지 및 좌/우 구분이 가능함을 확인하였으며, 실해역 시험에서는 지향성배열센서가 실제 해양환경에서 적용 가능하고 최종적으로 좌/우 구분 가능함을 확인하였다.
향후에는 본 논문에서의 연구 결과를 기반으로 DIFAR센서 카디오이드 빔형성 조향방안에 대한 연구와 DIFAR센서의 축 뒤틀림(롤)에 따른 좌/우 구분 성능 변화에 대한 연구를 진행할 계획이다.
