

I. 서 론
잠수함은 수면 아래에서 잠항하며, 전략 목표를 향해 은밀하게 접근하여 타격하는 임무를 수행한다. 이러한 특성으로 인해 잠수함은 현대 해상전력의 핵심 비대칭 전력으로 평가된다. 잠수함 탐지를 위해 광학, 전파, 소음을 이용한 다양한 시도가 이루어졌지만, 물속에서는 빛이 물 분자에 의해 흡수되고, 전파는 전해질에 의해 감쇠되기 때문에 일부 탐지 장비의 활용이 어렵다. 이에 따라 수중 물체 탐지 장치는 소음에 의존하게 되었다.
선박 또는 잠수함에서 발생하는 소음은 수중 방사 소음(Underwater Radiated Noise, URN)으로 불리며, 이는 잠수함의 은밀성과 안정성에 직결되는 중요한 성능 요소 중 하나로 평가된다. 잠수함의 수중 방사 소음은 크게 선체의 진동 소음과 추진기에서의 유동소음으로 분류할 수 있다.
선체 진동 소음은 함 내부의 기계 장치 작동으로 인해 발생하는 구조기인 소음이며, 기계의 진동 저감 설계 및 현가장치의 발전으로 인해 수중 방사 소음에 대한 상대적 기여도가 감소하였다. 이에 따라 기존에 기여도가 낮았던 유동소음의 상대적 기여도가 증가하였으며, 대형 및 고속 잠수함의 개발로 인해 유동소음의 중요성은 더욱 커지고 있다.
추진기에서 발생하는 유동소음은 비공동(non-cavitation) 소음과 공동소음으로 구분할 수 있다. 이 중 공동 소음은 비공동 소음보다 더 높은 레벨의 광대역 주파수 소음을 발생시킨다. 이러한 이유로 대부분의 잠수함은 추진기에서 공동이 발생하지 않는 상태에서 운항하도록 설계된다.
공동 현상은 추진기가 고속으로 회전할 때, 주변에 형성된 저압 구간에서 해수가 상변화하면서 발생하는 현상이다. 공동은 성장과 붕괴 과정에서 강한 수중 방사 소음을 유발한다. 최근 많은 해상 선진국에서는 추진기의 공동 성능을 향상시키기 위해 기존의 개방형 추진기에서 덕트형 추진기로 전환하는 추세다. 이에 따라 덕트형 추진기의 방사 소음 특성과 관련된 연구가 활발히 진행되고 있다.
Seol et al.[1]은 개방형 추진기에서 발생하는 공동 소음을 예측하기 위하여 Ffowcs-Williams Hawkings(FW-H) 방정식을 활용하였다. 그는 실험과의 검증을 통하여 FW-H를 활용한 공동 소음해석 기법의 유효성을 확인하였다. Ha et al.[2] 은 추진기에서 발생하는 공동에 대하여 FW-H 방정식을 활용하여 선체 벽면에서의 압력장을 추출하였으며, 소음의 전파 메커니즘을 고려하여 원거리에서의 소음을 실시간으로 추정할 수 있는 소음 모니터링 기법을 개발하였다. Ku et al.[3]은 FW-H 방정식을 활용하여 덕트형 추진기에서 발생하는 공동 소음을 예측하였으며, 공동 현상이 발생했을 때, 광대역 소음이 크게 발생하는 것을 확인하였다. 이와 같이 추진기의 공동소음을 예측하기 위해 FW-H 방정식이 활발하게 사용되고 있다. 하지만, FW-H 방정식은 공동소음의 방사 패턴에 대해서 적절하게 예측하지만, 발생 메커니즘에 대한 분석이 어렵다는 단점이 있다. Ku et al.[4,5]은 기포 동역학 기반의 해석과 단상유동해석기법을 이용하여 단방향 Eulerian-Lagrangian 연성 해석을 수행하였으며, 기포의 소음 모델링을 통하여 공동 소음을 예측하였다. 그는 기포의 성장과 붕괴 과정에서의 체적의 변화가 소음을 발생시킴을 확인하였다. Xiong et al.[6]은 덕트형 추진기에 대하여 광대역에서 건초더미(haystacking) 형태의 소음 스펙트럼이 발생되는 것을 확인하였으며, 이는 추진기로 유입되는 와류장과 추진기 로터 사이의 상호작용에 의한 현상임을 확인하였다. 덕트형 추진기는 기존의 개방형에서 발생하는 와류 공동의 구조와 다른 형태의 공동이 발생하게 된다. Gan et al.[7]은 덕트형 추진기의 공동 형상을 분석하였으며, 공동과 간극간의 상호관계에 대하여 분석을 하였다. 또한 Yuan et al.[8]은 고정밀 수치해석기법을 활용하여 전진비와 와류 공동의 궤적에 대한 상관관계를 분석하였다.
대부분의 연구는 기존의 개방형 추진기에서와 유사한 방식을 적용하여 수중 방사 소음을 예측하고 있으며, 덕트형 추진기에서 형성되는 공동 구조에 대해 초점이 맞춰져 있다. 하지만, 덕트형 추진기에서는 소음 특성이 기존과 다르게 발생하며, 공동 형상과 소음 특성의 상관에 관한 연구가 미흡한 상황이다. 본 연구에서는 간극 유동에 대하여 공동 소음 현상을 예측하고, 공동 소음의 전파 메커니즘에 대하여 분석하였다. 먼저, 대와류모사기법(Large Eddy Simulation, LES) 기반 이상 유동 해석을 통하여 간극에서의 공동 현상을 예측하였다. 이후, FW-H 방정식과 기포 소음 모델링을 통하여 추진기의 방사 소음을 예측하였다. 마지막으로 기포 소음 모델의 결과와 공동 형상과의 비교를 통하여 특정 주파수에서의 공동 소음 발생 메커니즘을 분석하였다.
II. 유동 해석 기법
날개 주변으로 유동이 흐를 때, 날개 끝에서 와류가 발생하며 와류 내부에는 저압 영역이 형성된다. 따라서, 공동 현상을 예측하기 위해선 날개 주변의 와류 구조뿐만 아니라 와류 내부의 압력장을 정확하게 예측해야 한다. 이를 위해 본 연구에선 전산유체역학(Computational Fluid Dynamics, CFD) 기반의 수치 기법을 활용하였다. 본 해석에서는 대와류모사기법을 활용하여 날개 주변의 유동장을 예측하였다. 대와류 모사기법은 공간에 대한 필터링(filtering)을 통하여 격자 보다 큰 스케일의 와류에 대해선 모델링 없이 직접적으로 계산하며, 격자보다 스케일의 와류에 대해선 모델링을 통하여 점성을 예측한다. 여기서, 격자보다 작은 와류에 대한 모델링을 아격자(Sub-Grid Scale, SGS) 모델이라고 한다. 또한, 기체와 액체 상태의 해수의 유동을 고려하여 대와류모사기법에 대한 균일 혼상류(Homogeneous-mixture)모델을 적용하였다. 아래는 대와류모사기법 기반의 이상유동 지배방정식을 나타내었다.
Eqs. (1)과 (2)의 u, ρ, p 그리고 ν는 각각 속도, 밀도, 압력 그리고 동점성 계수를 나타낸다. Eq. (2)의 는 전단 응력 변형률 텐서(strain-rate tensor)를 나타내며 아래와 같이 정의된다.
또한, 는 격자보다 작은 와류에 의한 난류 점성을 나타내며 다음의 식으로부터 계산된다.
본 연구에선 Eq. (4)를 위한 아격자 모델로서 Wall Adapting Local Eddy-viscosity(WALE) 모델을 적용하였으며, 아래와 같이 정의된다.
여기서 는 회전율 텐서(rotation-rate tensor)를 나타내며 다음과 같이 정의된다.
Eqs. (1), (2), (3), (4), (5), (6), (7) 까지의 아래 첨자 m은 혼합물(mixture)을 나타내며, 균일 혼상류 모델은 기체 분율을 이용하여 가상의 물질(pseudo material)을 정의한다. 혼합물의 물리량은 아래의 식을 이용하여 계산된다.
Eq. (8)의 아래 첨자 v, 와 l은 각각 기체(vapor)와 액체(liquid) 상태의 유체를 나타낸다. 본 연구에서는 공동 현상에 의한 액체와 기체 간의 질량 전달을 모사하기 위하여 Shnerr-Sauer의 공동 모델을 적용하였으며, 아래와 같이 정의된다.
여기서 의 조건에서는
의 조건에서는
이다. Eqs. (10)과 (11)에서의 는 기포의 반지름이며, 아래와 같이 계산된다.
Eq. (12)의 n은 기포 밀도(bubble density)이며, 세제곱미터당 기포의 수를 의미한다. 본 연구에서는 1e + 11을 값을 적용하였다.
본 해석에서 사용한 공간 차분 기법은 Table 1에 나타내었다.
Table 1.
Numerical schemes for velocity pressure coupling and discretization methods.
유동 해석을 위한 시간 간격은 1/100,000 s로 설정하였으며, 상용 소프트웨어인 Fluent v23를 활용하였다. 유체의 물성치는 동일한 실험에 대하여 수치해석을 진행한 논문을 참고하였으며, Table 2에 나타내었다.[9]
Table 2.
Material properties of vapor and liquid state for water at 300 K.
| Variable | Value | |
| Fluid state | Liquid | Vapor |
| Density [] | 996.5 | 0.0256 |
| Viscosity [𝜇Pa•s] | 853.8 | 9.76 |
| Surface tension [] | 0.072 | - |
| Vapor pressure [Pa] | - | 3,536 |
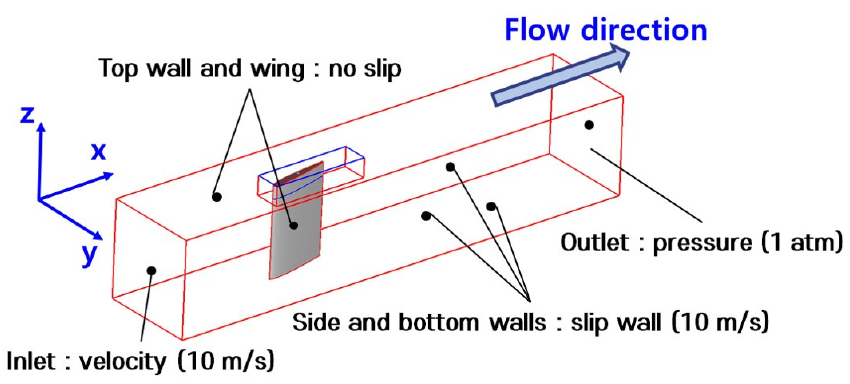
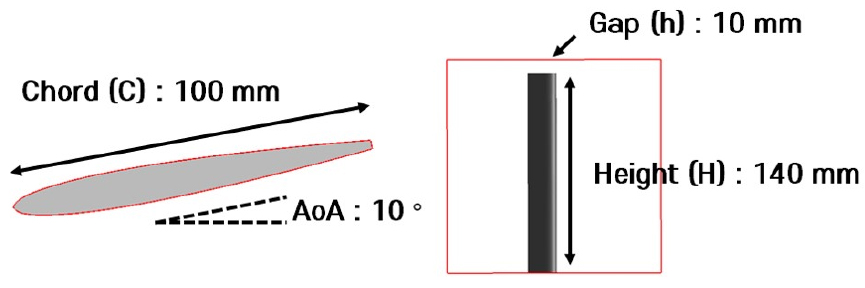
간극 유동을 모사하기 위한 모델로서 Dreyer[10]의 실험을 참고하였다. 그는 캐비테이션 터널에 NACA 0009 단면 형상의 날개를 부착하였으며, 높이를 조절하여 터널 벽면과 날개 사이의 간극을 설정하였다. Fig. 1은 수치해석 영역과 경계조건을 나타내었다. 실험에 사용된 캐비테이션 터널의 계측 구간의 크기는 높이와 두께가 각각 150 mm로 동일하며, 총 길이는 750 mm이다. 본 해석에서는 입구 단으로부터 200 mm의 떨어진 거리에 날개의 전연(leading edge)이 위치하도록 설정하였다. 실험에 사용된 NACA 0009의 형상과 간극의 크기를 Fig. 2에 나타내었다. 날개는 10°의 받음각(Angle of Attack, AoA)으로 설치되었다. 날개 두께의 최곳값은 10 mm이며, 간극과 폭의 비()는 1로 설정하였다.
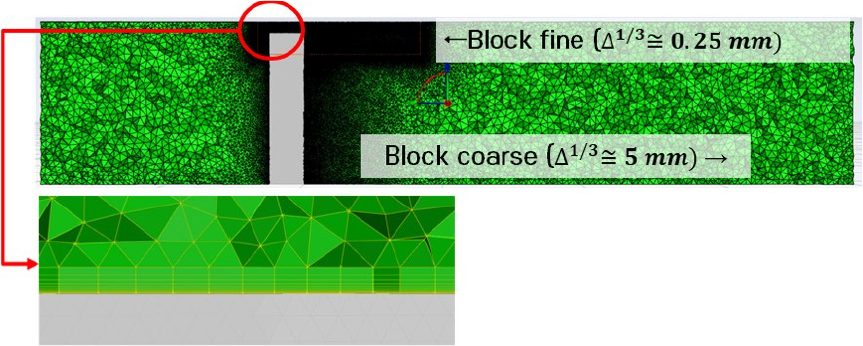
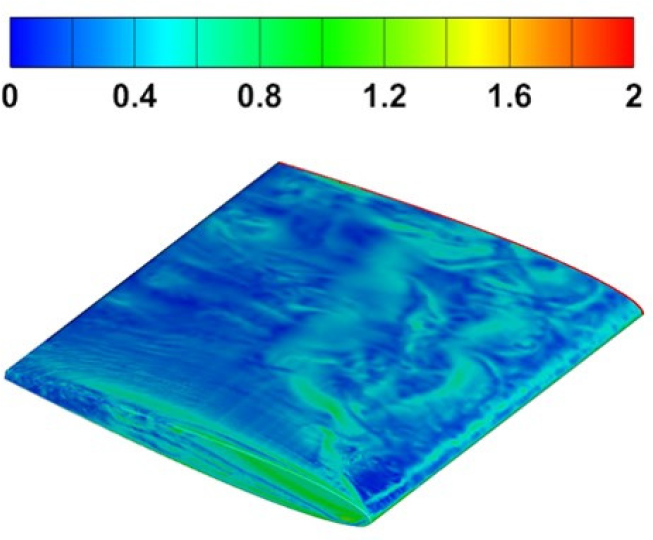
날개 주변의 유동 구조를 정밀하게 예측하기 위하여 Fig. 3과 같이 격자를 구성하였다. 날개 끝 공동이 발생하는 영역과 날개 주변의 영역에 대하여 조밀한 격자 영역을 구성하였다. 날개 끝 와류를 정확하게 예측하기 위해선 와류 내에 총 25개 이상의 격자점을 구성해야한다고 알려져 있으며, 현재의 격자는 60개의 격자가 구성되어 있음을 확인하였다.[4] 또한, 날개 벽면에서의 경계층 유동을 고려하여 프리즘(prism) 격자를 구성하였다. 프리즘 격자는 총 11개의 층으로 구성되어 있으며, 1.4의 성장률(growth rate)을 적용하였다. 조밀한 영역에 대해선 약 2천만 개의 격자를 구성하였으며, 외의 영역에서는 1천 6백만 개의 격자를 구성하였다. 격자 구성의 유효성을 확인하기 위하여 날개 표면에서의 y+를 Fig. 4에 나타내었으며, 1 이하의 값을 가지는 것을 확인하였다. y+가 1 이상의 값을 가지는 영역은 날개의 끝 전연 영역이며, 최대 1.2의 값을 가진다.
III. 소음해석 기법
공동의 형성으로 인해 발생하는 수중 방사 소음을 예측하기 위해 Computational Aero Acoustic(CAA) 기반의 공력 소음해석 기법을 적용하였다. 본 연구에서는 2개의 소음원 모델링 기법을 적용하였다. 먼저 FW-H 방정식을 적용하였으며, 아래와 같이 정의된다.
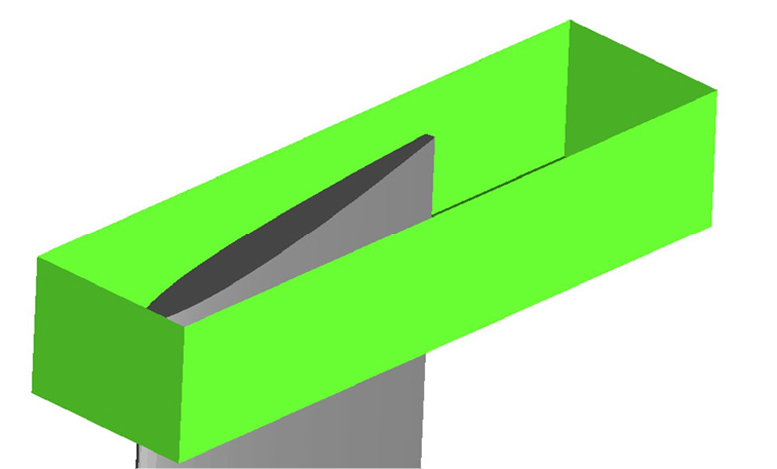
Eq. (13)의 y와 𝜏는 각각 소음원으로부터 수음점까지의 거리와 수음점까지의 전파 시간을 나타낸다. 또한, 우변의 첫 번째 항과 두 번째 항 그리고 세 번째 항은 각각 단극자(monopole), 쌍극자(dipole) 그리고 사중극자(quadrupole)를 나타낸다. 사중극자 소음은 마하수(Mach number)의 8승에 비례한다고 알려져 있다. 물의 경우는 전파 속도가 1,500 m/s이지만, 본 해석의 유속은 10 m/s이며 마하수는 6.6e-3의 값을 가진다. 따라서 본 해석에서는 사중극자에 의한 소음을 무시하였다. Eq. (14)의 S는 단극자 및 쌍극자에 의한 소음을 계산하기 위한 소음 적분면을 의미하며, 본 연구에서는 Fig. 5에 나타낸 투과성 적분면을 사용하였다. Fig. 5의 연두색 면은 투과성 적분면을 나타내며, 육면체의 윗면은 벽면을 나타내며, 적분 계산에서 제외하였다.
두 번째로 Fitzpatrick과 Strasberg[11]의 기포 소음모델을 적용하였으며, 아래와 같이 정의된다.
Eq. (14)에서 와 는 각각 물의 밀도와 공동의 체적을 나타낸다. 이들은 기포에 의한 소음을 단극자 소음으로 모델링하였으며, 기포 체적의 가속도 값과 전파 소음과의 상관식을 제안하였다. Fig. 5의 영역과 동일한 영역 안에서 아래의 식을 이용하여 공동의 체적을 계산하였다.
공동 소음의 목표 주파수는 50 Hz ~ 10,000 Hz로 설정하였다. 이를 위해 소음의 계산에 적용된 시간 간격은 유동 해석과 동일한 1/100,000 s로 설정하여 목표 주파수의 10배의 시간 간격을 가진다. 총 2,000개의 유동 데이터를 활용하였으며, 50 Hz의 주파수 간격을 가진다. 소음의 파워스펙트럼밀도(Power Spectral Density, PSD) 계산을 위해 Hanning 함수를 적용하였으며, Fast Fourier Transform(FFT)을 수행하였다. 수음점의 위치는 원점에서 300 mm 하류방향의 날개 높이로 설정하였다. SPL 계산을 위해 1𝜇Pa값을 참조 값으로 활용하였다.
IV. 수치해석 결과
실험에서의 공동 유동 조건을 확인하기 위해 공동 수를 지표로 선정하며, 아래와 같이 정의된다.
Eq. (16)에서 와 는 각각 출구단과 기포압을 의미하며, 는 입구단에서의 유속을 의미한다. 실험에서의 출구단은 1 bar이며, 기포압은 3,540 Pa이다. 또한 유속은 10 m/s로 설정되었다. 3,540 Pa은 약 300 K에서의 포화압이며, 밀도는 약 996.5 kg/m3이다. 따라서, Eq. (16)을 통하여 계산된 실험에서의 공동 수는 1.96이다.
Fig. 6에서는 유동 해석 기법을 활용한 공동의 현상을 실험과 비교하였다.[9] Fig. 6(b)는 해석을 통하여 예측 된 공동에 대하여 체적 분율이 0.5에서의 등가면(iso-surface)를 나타내었다. Fig. 6(a)의 실험결과에서 확인할 수 있듯이, 날개 끝 면에서의 공동과 전연에서 시작하는 와류 공동을 확인할 수 있다. 일반적으로 전자는 Tip Separation Vortex Cavitation(TSVC)이며, 후자는 Tip Leakage Vortex Cavitation(TLVC)으로 알려져 있다. Fig. 6(b)의 해석 결과에서 이러한 공동 현상들이 예측됨을 확인할 수 있으며, 날개의 중간 높이의 전연에서 발생하는 구름(cloud) 공동을 확인할 수 있다.
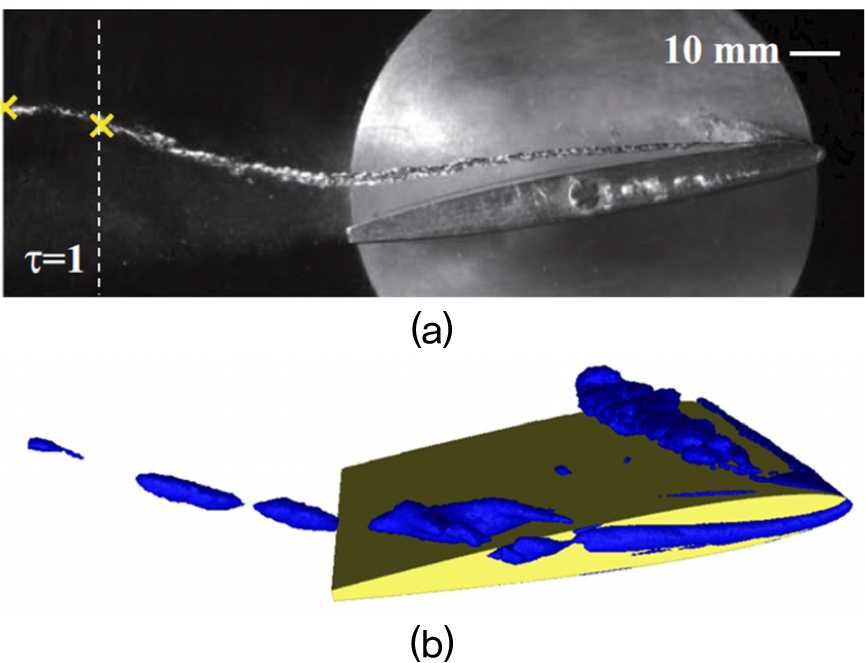
Fig. 7은 유동 해석을 통해 계산된 와류장을 확인하기 위하여 lambda2의 등가면을 도시하였다. 와류 공동은 날개 끝의 전연에서 시작되는 것을 확인할 수 있다. TSV는 날개 끝의 압력면(pressure side)을 따라 발생하며, 하류를 따라 흐르는 것을 알 수 있다. TSV가 하류로 이동하면서 압력면에서의 고압으로 인해 흡입면(suction side)으로 이동하며, 간극 벽면에서 Fig. 7의 그림의 세로로 분포 되어 있는 난류층의 영향을 받게 된다. 이렇게 넘어간 TSV는 전연에서 발생하기 시작한 TLV와 합쳐진다. 이러한 현상은 특정 주기로 발생하며, 날개 하류의 TLV를 주기적으로 강하게 만든다고 알려져 있다.[8]
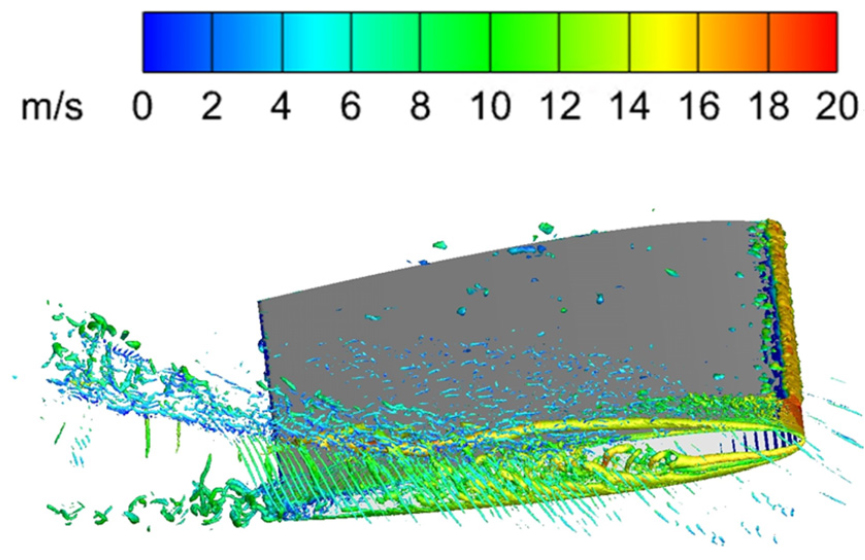
Fig. 8에서는 하류 방향으로 x / C = 1 지점에서 실험의 속도장과 해석을 통해 예측된 속도장을 비교하였다. 날개의 끝에서 TLV에 의해 고속의 속도장이 발생하며, 12 m/s의 속도로 전파되는 것을 알 수 있다. 다만, 날개의 후단 영역에서 실험과 해석의 편차가 발생함을 알 수 있다. 이는 해석 결과는 특정 시간에서의 유동장인 것에 반해 실험의 결과는 데이터를 평균하여 도시한 것이다. 이로 인해 작은 와류 섭동이 평균화가 됨에 따라 상쇄되어 편차가 발생한 것으로 판단된다. 본 논문에 목표가 되는 TLVC는 실험과 동일한 경향이 발생함을 확인하였으며, 이로 인해 해석의 유효성을 확인할 수 있다.
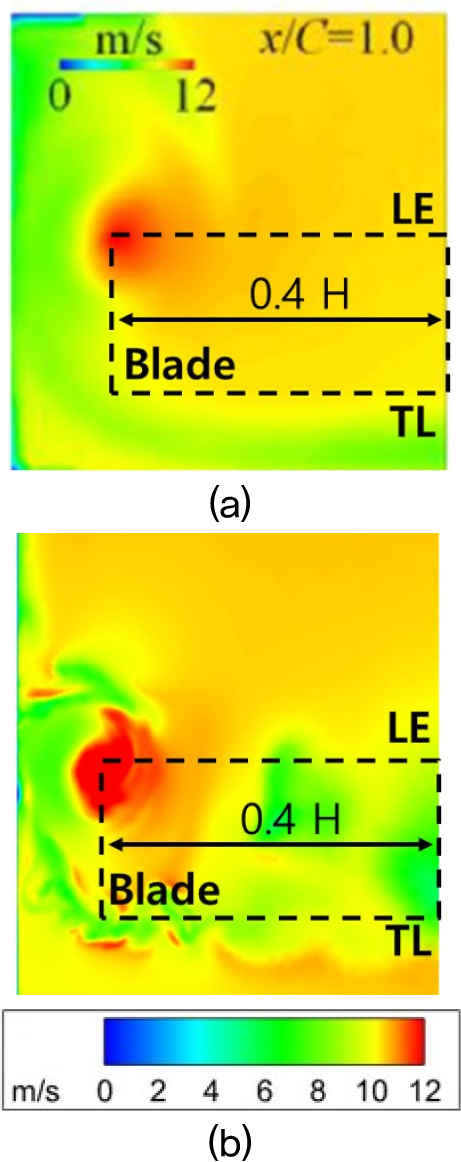
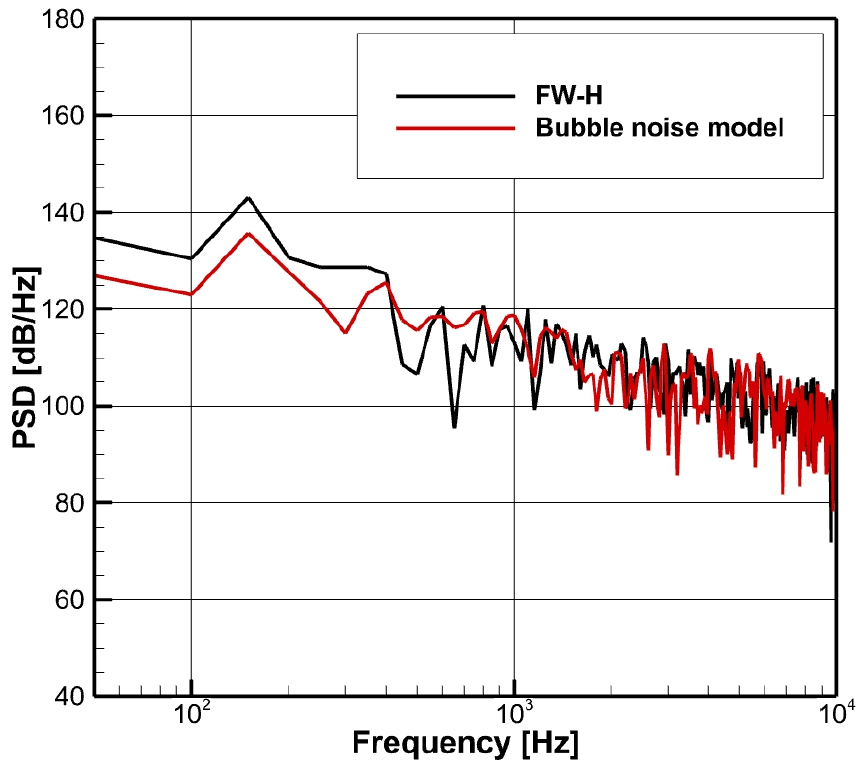
Fig. 9는 FW-H와 기포 소음(bubble noise) 모델을 활용하여 공동 소음을 예측한 결과를 나타내었다. 앞서 참고문헌을 통해 FW-H 방정식은 공동 소음의 전파를 적절하게 묘사함을 확인하였다. 기포 소음 모델은 FW-H와 일치되는 경향을 확인할 수 있으며, 기포 소음 모델이 공동 소음을 적절하게 묘사하고 있음을 확인할 수 있다.
간극에서는 TSVC와 TLVC, 2개의 공동 현상이 발생하며, 두 공동 간의 기여도를 확인하기 위해 공동의 체적을 Fig. 10과 같이 분리하였다. Fig. 10에서는 z/H가 0.9 이상이 되는 영역에 대한 공동을 나타내었으며, 구름 공동은 날개의 높이 방향으로 0.9 이하의 영역에서 분포함으로 공동의 형상으로 나타내지 않았다. Fig. 11은 Fig. 10(a)와 (b)의 공동으로 인해 유발되는 소음을 계산하여 파워스펙트럼밀도를 나타내었다.
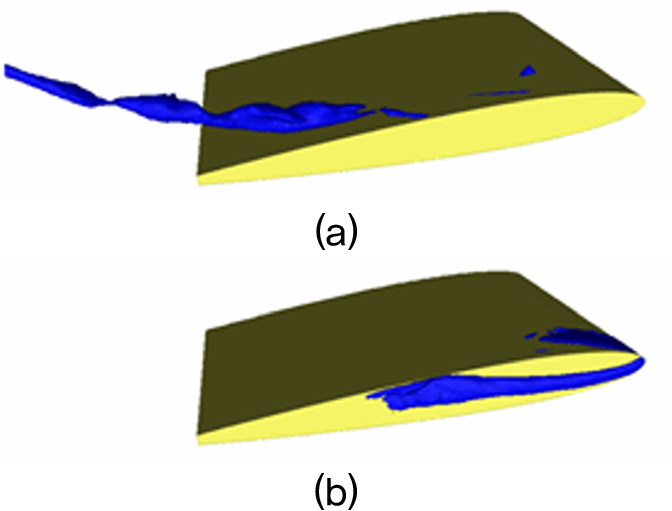
Fig. 11에 나타낸 바와 같이 2개의 공동 모두 1,000 Hz 이상의 영역에서 광대소음을 발생시키는 것을 확인할 수 있다. 또한, 난류가 소산됨에 따라 공동 역시 소산되며 –6 dB/octave의 기울기로 소음이 줄어드는 것을 확인할 수 있다. 또한, 150 Hz의 영역에서 TLVC의 기여도가 크게 발생하는 것을 확인할 수 있다. 이러한 해당 주파수에서의 소음 원인을 분석하기 위해 소음 신호의 시변 데이터를 Fig. 12에 나타내었다.
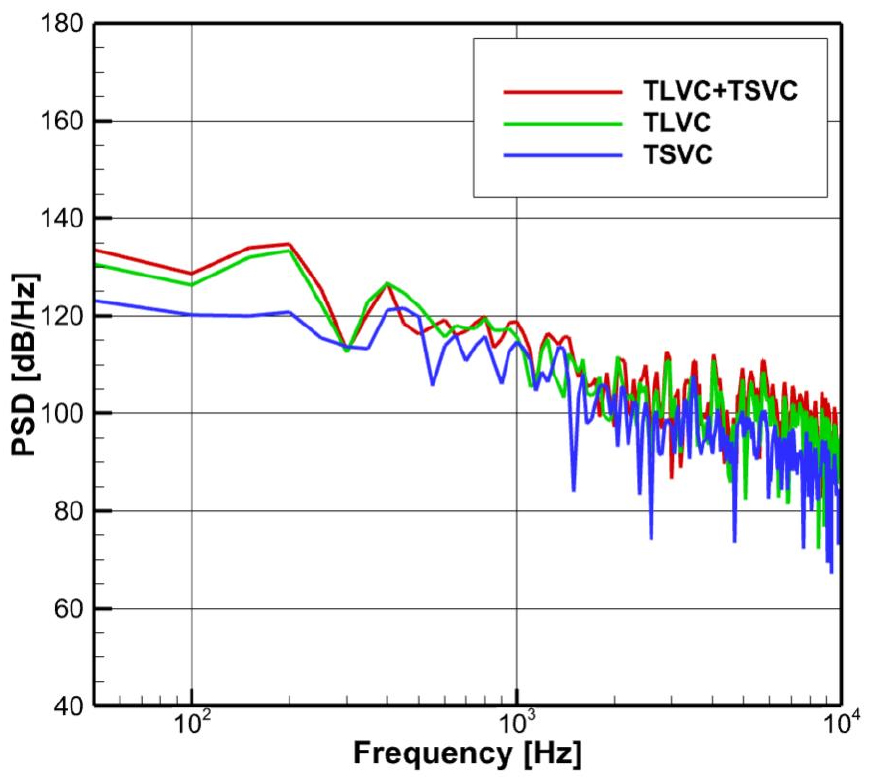
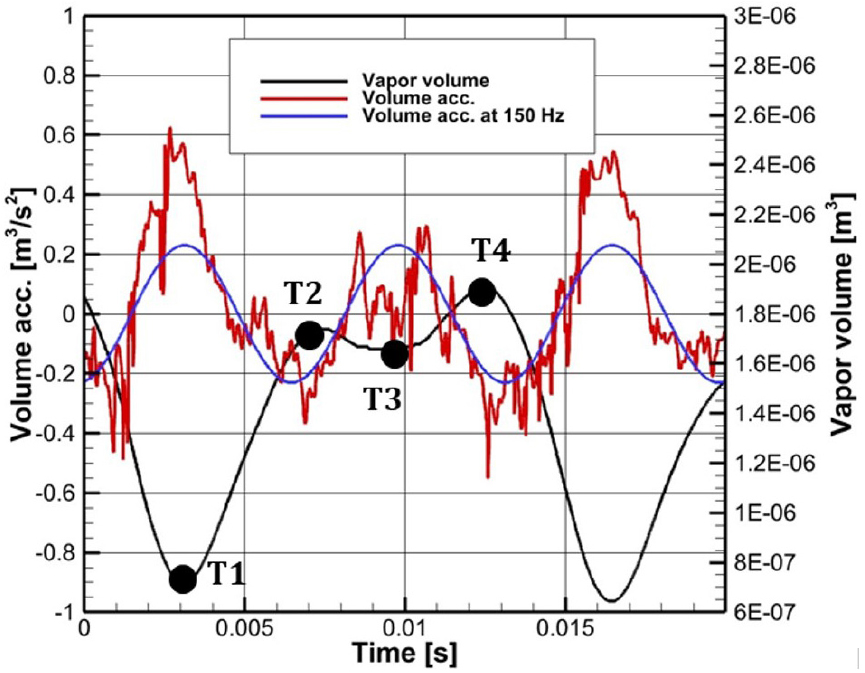
Fig. 12에 총 3개의 그래프를 도시하였다. 검은색 그래프는 해당 영역에서 공동의 체적을 나타내었으며, 빨간색 선과 파란색 점선은 각각 체적의 가속도 값과 150 Hz에서의 체적 가속도를 나타내었다. 검은색 그래프의 T1, T2, T3 그리고 T4는 파란색 그래프의 변곡이 발생하는 지점을 나타내었으며, 이를 통해 공동의 체적이 150 Hz의 주기로 변화하는 것을 확인할 수 있다. 또한, 체적의 가속도 그래프에서 150 Hz에서 큰 진폭의 신호가 있음을 확인할 수 있다. 이 신호는 150 Hz의 체적 가속도 성분과 높은 상관성이 있음을 확인할 수 있다. 이러한 특정 주파수의 소음의 원인은 Fig. 13의 공동의 형상을 통해 확인할 수 있다. Fig. 13의 그림은 Fig. 10(a)의 TLVC 공동 형상에 대하여 150 Hz 주기의 1/4주기에서의 공동 형상을 나타내었다.
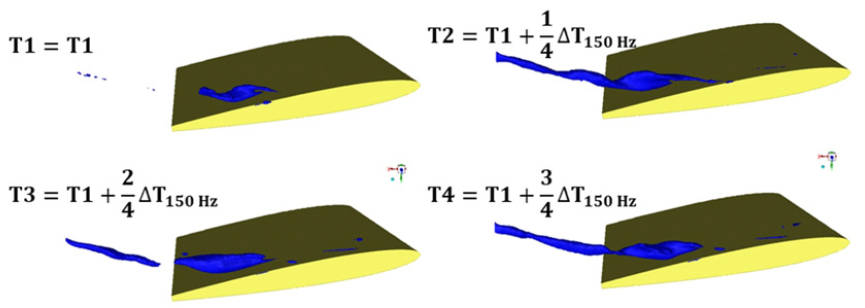
Fig. 13에서 ∆T는 150 Hz의 주기를 나타낸다. T1에서는 TLVC가 작게 분포하는 것을 하지만 T2로 시간이 지남에 따라 공동이 크게 성장하는 것을 확인할 수 있다. 이는 앞서 와류장에서 설명한 바와 같이 TSVC가 간극 통과하여 TLVC로 합류하는 과정에서 공동이 급성장하는 것으로 판단된다. 이후, 공동이 소산함에 따라 T3로 이동하며 공동의 체적이 감소하게 된다. T3 지점에서의 공동이 상류에서 발생한 TLVC와 합류하며 공동이 다시 성장한다. 이후, TSVC가 약해짐에 따라 다시 T1과 같이 공동의 체적이 감소하게 된다. 이러한 현상은 특정 주파수에서의 큰 소음을 유발한다. 아울러, 공동이 붕괴하는 과정에서 큰 가속도 성분이 발생하는 것을 확인할 수 있으며, 이를 통행 공동의 성장 과정에 비해 붕괴 과정에서 큰 소음을 유발하는 것 또한 확인할 수 있다.
V. 결 론
본 연구는 최근의 잠수함이 개방형에서 덕트형 추진기로 변화함에 따라, 덕트형 추진기의 날개 부분에서 발생하는 공동 현상과 수중 방사 소음의 발생 메커니즘을 분석하기 위한 기초 연구로서, 간극이 있는 날개에 대하여 공동의 구조와 공동에 의한 소음의 전파 메커니즘에 대하여 분석하였다.
대와류모사기법 기반의 균일 혼상류 모델을 적용하여 이상 유동을 수행하였으며, 기체와 액체 간의 상변화로 인한 질량 전달 모델로서 Schnerr-Sauer 모델을 적용하였다. 간극 유동에서는 날개 끝에서 개방형 날개와 다른 TSVC와 TLVC의 공동이 발생함을 확인하였다. 또한, 간극 유동에서는 TSVC가 성장하면서 간극을 넘어가게 되고, TLVC와 합류하며 강한 와류를 형성함을 확인하였다.
소음해석을 위해선 CAA 기반의 FW-H 방정식과 기포 소음 모델을 적용하였으며, FW-H 방정식과의 비교를 통해 기포 소음 모델의 유효성을 확인하였다. 또한, 공동 형상과 방사 소음 간의 상관성을 분석하였으며, 150 Hz의 저주파수 대역에서의 소음이 발생함을 확인하였다. 이는 TSVC와 TLVC 간의 상호작용에 의한 공동의 성장과 붕괴 현상으로 발생하는 소음으로, TSVC와 TLVC 간의 주기적인 상호작용이 150 Hz에서 소음을 유발함을 확인하였다. 본 연구를 통해 간극 유동에서의 공동의 형상과 소음의 방사 특성에 대해 분석하였으며, 향후 덕트형 추진기에서의 소음 특성을 이해하는 데 활용할 수 있을 것으로 기대된다.
