

I. 서 론
II. 표적 산란 시뮬레이션
2.1 자세각-주파수 산란 강도 이미지
2.2 양상태각-주파수 산란 강도 이미지
2.3 자세각-양상태각 산란 강도 이미지
III. 데이터 생성 및 전처리
IV. 서포트 벡터 머신을 이용한 운용 변수 평가
V. 결 론
I. 서 론
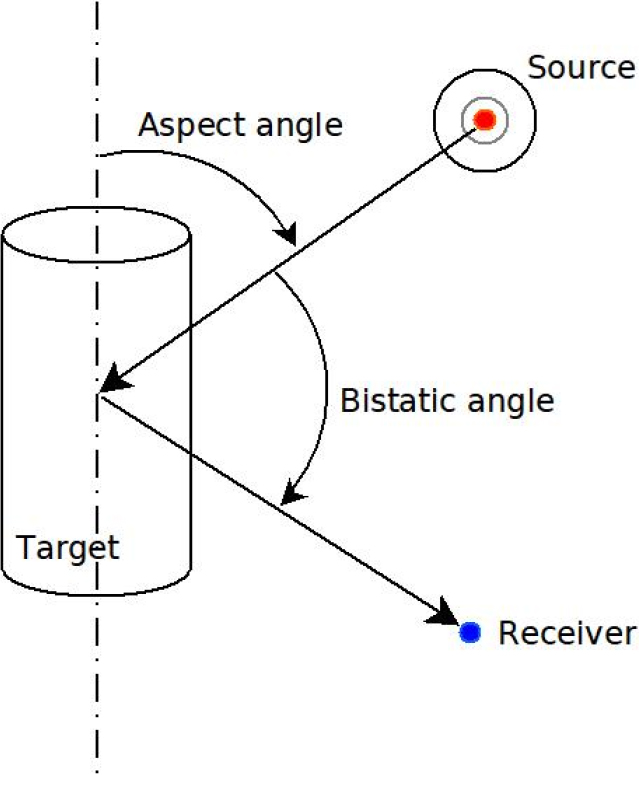
수중 표적의 음향 산란은 소나 시스템을 이용하여 측정된다. 이때, 송신기와 수신기의 위치, 표적의 방향에 따라 Fig. 1과 같이 표적의 주축과 음원 사이의 자세각과 음원과 수신기 사이의 양상태각이 형성된다. 계측된 표적 강도는 자세각과 양상태각 등의 운용 변수에 따라 2차원 이미지로 표현할 수 있다.[1]
표적 강도 이미지는 표적의 형태와 재질 그리고 환경에 따른 특성을 나타내므로 표적 식별에 용이하다. 수중 표적의 산란 강도를 단상태 소나를 이용하여 관찰한 연구가 수행된 바 있다.[1,2] 양상태각-주파수 이미지로 수중 표적의 산란 강도를 관찰한 연구도 여러 연구자들에 의해 수행되었다.[3,4,5] 표적의 산란 강도를 2차원 이미지로 나타내는 많은 연구가 수행되었으나 어떤 운용 변수를 이용하는 것이 효과적인지에 대한 연구는 미비하다. Fischell과 Schmidt[6]은 구와 실린더의 표적 분류에 가장 효과적인 양상태각을 찾기위한 연구를 수행하였다. 해당 연구에서는 단일 주파수만을 이용하며 자세각에 대한 고려가 부족하였다.
본 연구에서는 자세각, 양상태각, 주파수 세 개의 운용 변수 중 두 개로 산란 강도 이미지를 만들고, 이를 이용하여 구와 실린더를 분류할 때, 분류에 가장 효과적인 운용 변수를 평가하였다. 구와 실린더의 음향 산란은 상용 프로그램인 콤솔(COMSOL Multiphysics)을 이용하여 계산되었다. 계산된 음향 산란에 잡음을 더하여 데이터를 생성하고, 이를 서포트 벡터 머신으로 분류하여 분류 정확도를 기준으로 운용 변수를 평가하였다.
II. 표적 산란 시뮬레이션
콤솔은 유한요소법을 기반으로 물리 현상을 시뮬레이션할 수 있는 모델링 패키지 소프트웨어이다. 본 연구에서 표적은 공기가 채워진 알루미늄 구와 실린더를 가정하였으며 Fig. 2와 같이 해석 영역을 구성하였다. 표적의 제원은 Table 1과 같으며, 두 표적 모두 회전체이므로 계산 효율을 위하여 3차원이 아닌 2차원 축대칭 형상을 이용하였다.[7] 시뮬레이션을 수행한 환경의 경계면을 완전 정합층으로 설정하여 반사파가 없는 환경을 가정하였다. 음원 주파수는 4 kHz에서 200 Hz간격으로 18.2 kHz까지 계산되었으며, 파수(k)와 표적의 반지름(a)의 곱인 무차원 수 ka로 2.6-12.0이다. 표적에 입사되는 신호는 평면파로 가정하였으며 수신기도 원거리장 조건을 만족하는 거리로 가정하였다.
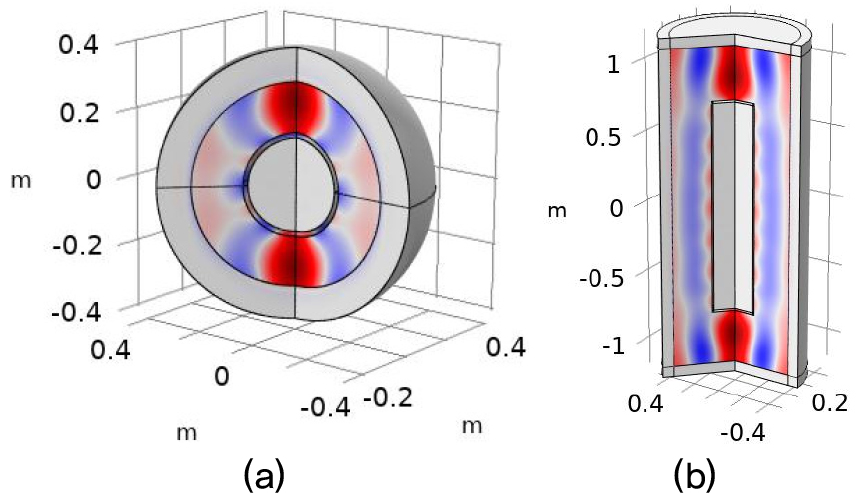
Table 1.
Target size.
| Target | Outer diameter | Thickness | Length |
| Sphere | 31 cm | 1.5 cm | - |
| Cylinder | 31 cm | 1.5 cm | 150 cm |
2.1 자세각-주파수 산란 강도 이미지
자세각-주파수 산란 강도 이미지는 양상태각을 고정시킨 상태에서 자세각을 변화시켜 얻은 산란 강도를 2차원 이미지로 표현한 것을 의미한다. Fig. 3(b)와 (c)는 각각 구와 실린더에 대해 양상태각을 180°로 유지하며 측정한 산란 강도를 나타낸 것이다. Fig. 3(e)와 (f)는 양상태각을 80°로 변화시켰을 때의 산란 강도이다. 예상되는 바와 같이 표적의 형상에 따라 산란 강도의 방사 패턴이 달라지는 것을 알 수 있다.
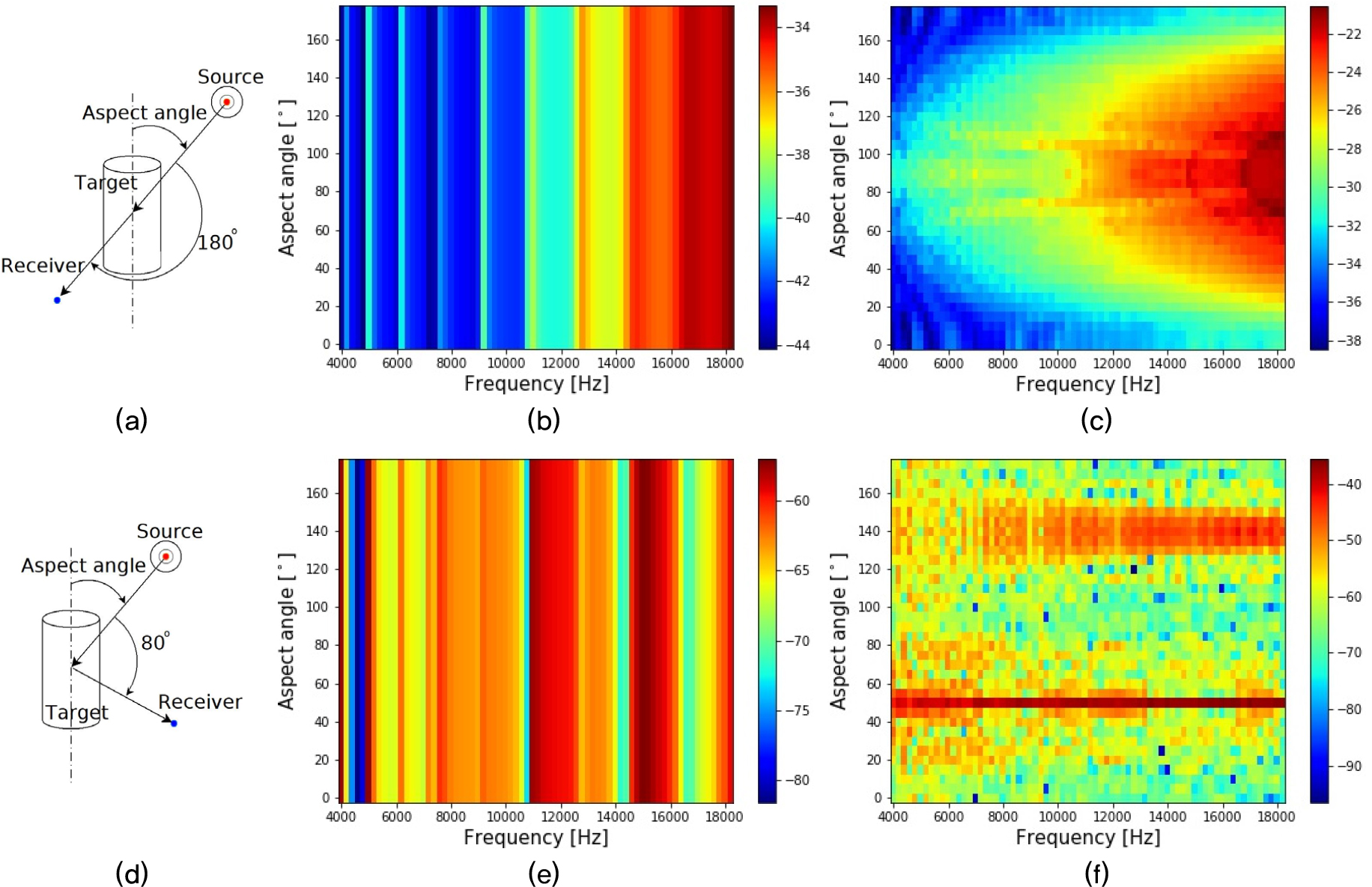
구 표적의 경우 자세각에 따른 형상의 변화가 없으므로 산란 강도 이미지에서 주파수에 따른 변화만 나타난다. 표적의 주변에 산란장이 형성되고 표적의 두께와 재질에 따라 특정 각도에서 Fig. 3(e)와 같이 산란 강도가 증가하거나 약해지는 구간이 발생한다. Fig. 3(b)와 같이 전방 산란에 해당되는 경우 일정 주파수까지 주파수가 증가함에 따라 산란 강도가 강해진다.[8]
실린더 표적도 전방 산란의 경우 주파수가 증가함에 따라 산란 강도가 증가하고, 음원 방향이 단면의 넓이가 좁은 밑면(자세각 0°, 180°)에 위치한 경우 산란 강도가 감소한다[Fig. 3(c)]. Fig. 3(f)에서 자세각이 50°인 경우 실린더 옆면을 기준으로 음원과 수신기의 입사각과 반사각이 같아져 산란 강도가 크게 계측된다. Fig. 3(f)에서 자세각이 140°인 경우 실린더의 밑면을 기준으로 음원과 수신기의 입사각과 반사각이 같아진다. 실린더의 밑면의 넓이가 작기 때문에 자세각이 50°인 경우와 다르게 주파수가 높아질수록 산란 강도가 크게 계측된다.
2.2 양상태각-주파수 산란 강도 이미지
양상태각-주파수 산란 강도 이미지는 음원을 고정시킨 상태에서 표적을 중심으로 이동하는 수신기로 양상태각을 변화시키며 계측한 산란 강도의 2차원 이미지다. Fig. 4(a)와 같이 자세각이 40°로 고정된 상태에서 수신기가 표적을 중심으로 이동하며 측정된 산란 강도는 Fig. 4(b)와 (c)이다.
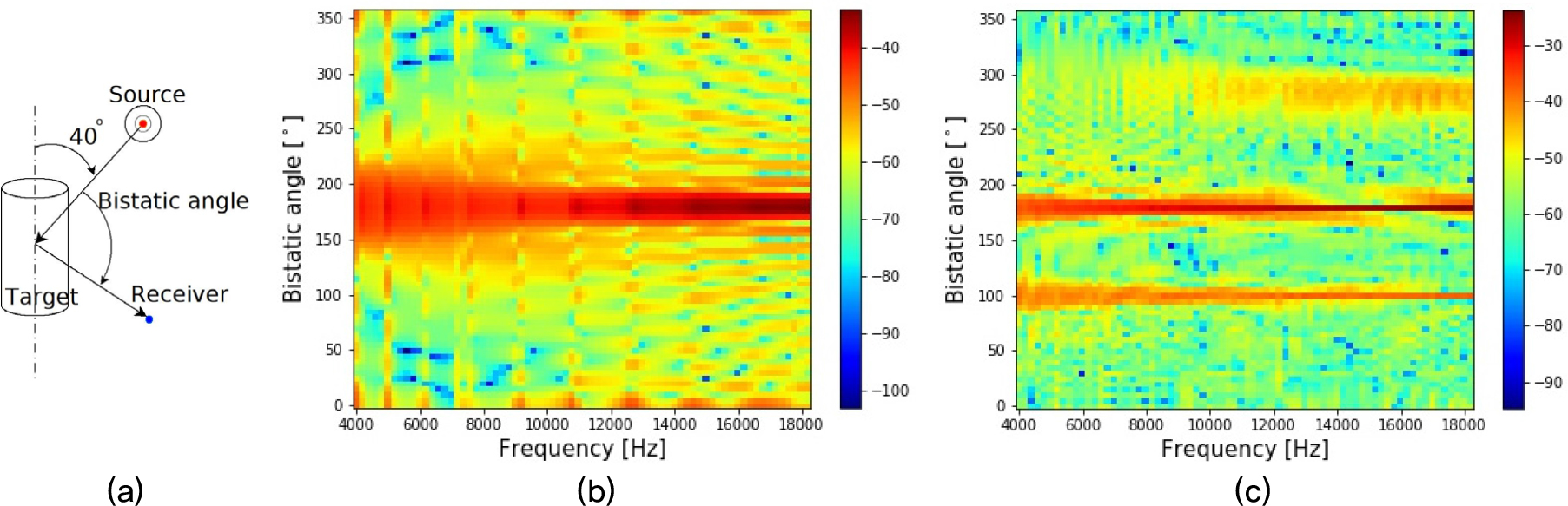
Fig. 4(b)에서 구는 형상적으로 대칭이 되므로 양상태각 180°를 기준으로 산란 강도가 대칭된 결과를 보인다. 양상태각에 따라 보강, 상쇄 간섭의 결과로 산란 강도가 달라진다. 양상태각 180°에서는 전방 산란으로 산란 강도가 증가한다.
Fig. 4(c)에서 실린더는 Fig. 3(f)와 같은 이유로 실린더의 옆면과 밑면에서 발생된 반사파로 인하여 100°와 280°에서 산란 강도가 증가한다. 구와 마찬가지로 전방 산란인 180°에서 산란 강도가 증가한다.
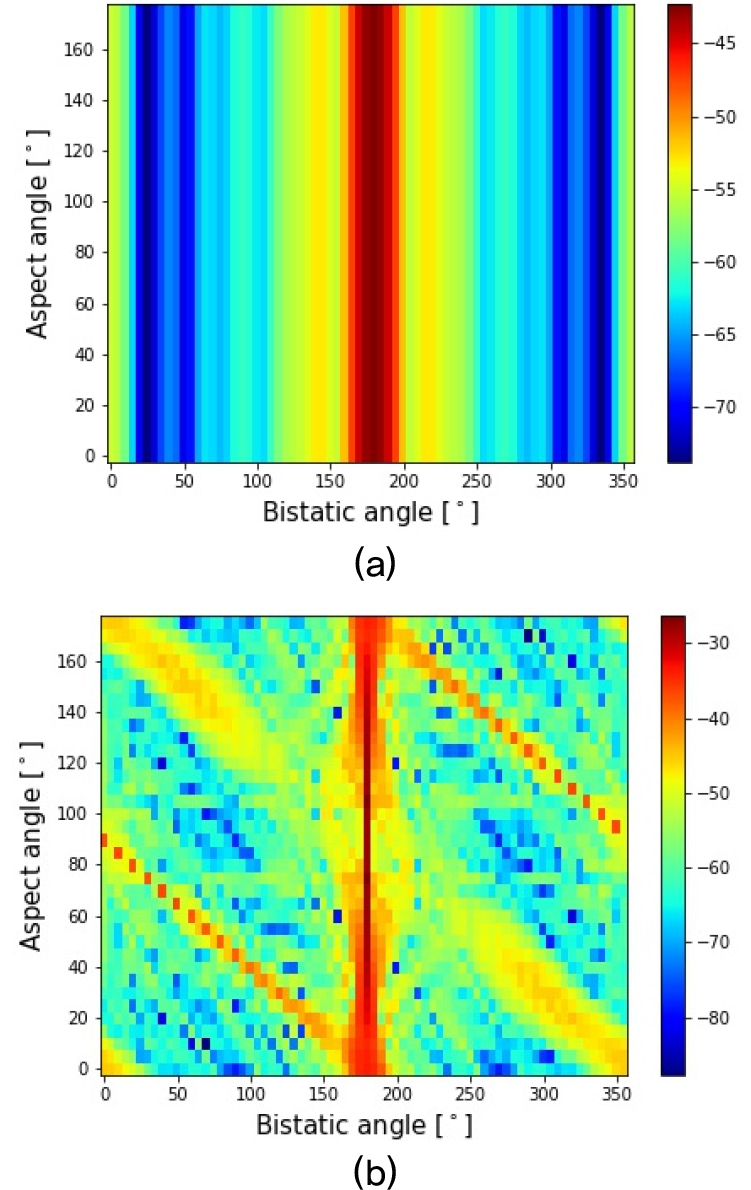
2.3 자세각-양상태각 산란 강도 이미지
자세각-양상태각 산란 강도 이미지는 단일 주파수를 이용하여 표적 주변 모든 영역에서 관측한 산란 강도이다. Fig. 5에서 구의 산란 강도는 앞의 결과와 마찬가지로 자세각에 대해서는 변화가 없고, 전방 산란에 해당되는 양상태각 180°에서 산란 강도가 크게 나타난다. 실린더도 전방 산란인 양상태각 180°에서 산란 강도가 증가한다. 자세각 90°, 양상태각 0°에서 자세각 0°, 양상태각 180°까지 나타나는 강한 산란은 실린더의 옆면에서 발생된 것이다. 자세각 175°, 양상태각 0°에서 자세각 110°, 양상태각 140°에 나타난 강한 산란은 실린더의 밑면에서 발생한 것이다. 실린더의 형상으로 인하여 산란 강도도 자세각 90°, 양상태각 180°를 중심으로 점대칭 형태를 띤다.
III. 데이터 생성 및 전처리
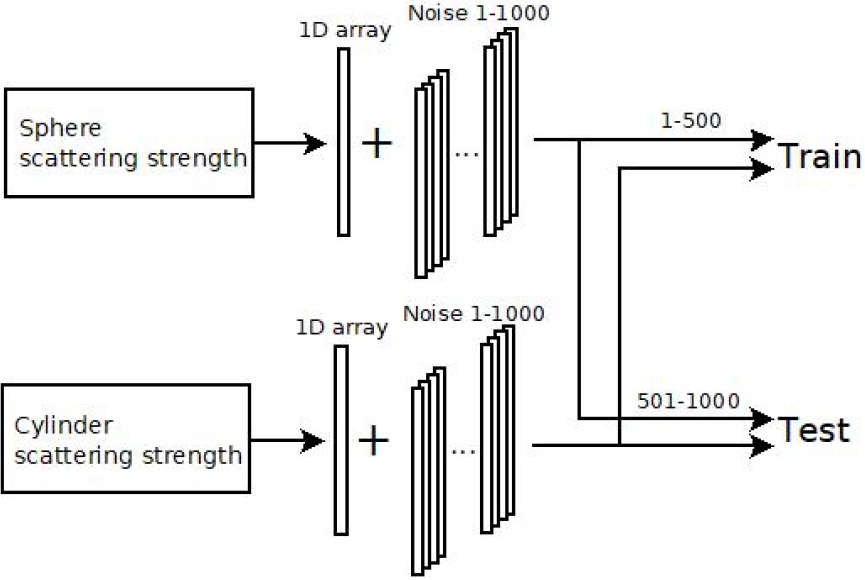
계산된 표적 산란 데이터는 1차원 배열로 변환하고 가우시안 잡음를 더하여 1000개의 데이터를 생성하였다. 500개의 데이터는 학습에 사용하고, 나머지 500개의 데이터는 테스트에 사용하였다(Fig. 6). 표적 분류 정확도는 테스트 데이터 중 올바르게 표적을 분류한 비율을 의미한다. 산란 강도 이미지의 운용 변수에 따른 분류 정확도를 비교하기 위하여 모든 산란 강도 이미지에 동일한 잡음을 적용하였다. 잡음 준위는 산란 강도의 운용 변수를 평가하기 위하여 분류 정확도의 최댓값이 1 미만이 되도록 설정하였다.
IV. 서포트 벡터 머신을 이용한 운용 변수 평가
서포트 벡터 머신은 기계 지도 학습 방법 중 하나로써 두 데이터간의 거리가 최대가 되는 초평면을 생성하여 분류 기준으로 사용한다. 학습 데이터 xn, n = 1, 2, 3, ..., N을 가정할 때, 데이터는 두 개의 클래스(본 연구에서는 구와 실린더)로 나뉘며 sn ∈ {1, -1}로 나타낼 수 있다. 초평면은 wTxn+b=0을 만족하며, 입력 데이터 xn에 대해 두 개의 클래스를 분리한다. 초평면과 거리가 가장 가까운 데이터를 서포트 벡터라고 하며, 서포트 벡터 머신은 두 클래스의 서포트 벡터 사이의 거리를 최대화하는 문제로 Eq. (1)과 같이 표현된다.[9]
본 연구에서는 서포트 벡터 머신을 이용하여 표적을 분류하고, 세 가지 산란 강도 이미지의 평균 정확도 비교를 통하여 어떻게 데이터를 취득하는 것이 표적 분류에 효과적인지 평가 하였다.
자세각-주파수 산란 강도 이미지는 고정된 양상태각이 0-355°에 대한 분류 정확도가 Fig. 7(a)과 같이 나타났다. Fig. 3(b)와 (c)처럼 양상태각이 180°인 경우는 전방 산란되어 구와 실린더의 산란 강도 이미지가 유사하고, 표적 형상에 의한 영향이 적게 반영되어 분류 정확도가 낮게 나타났다.
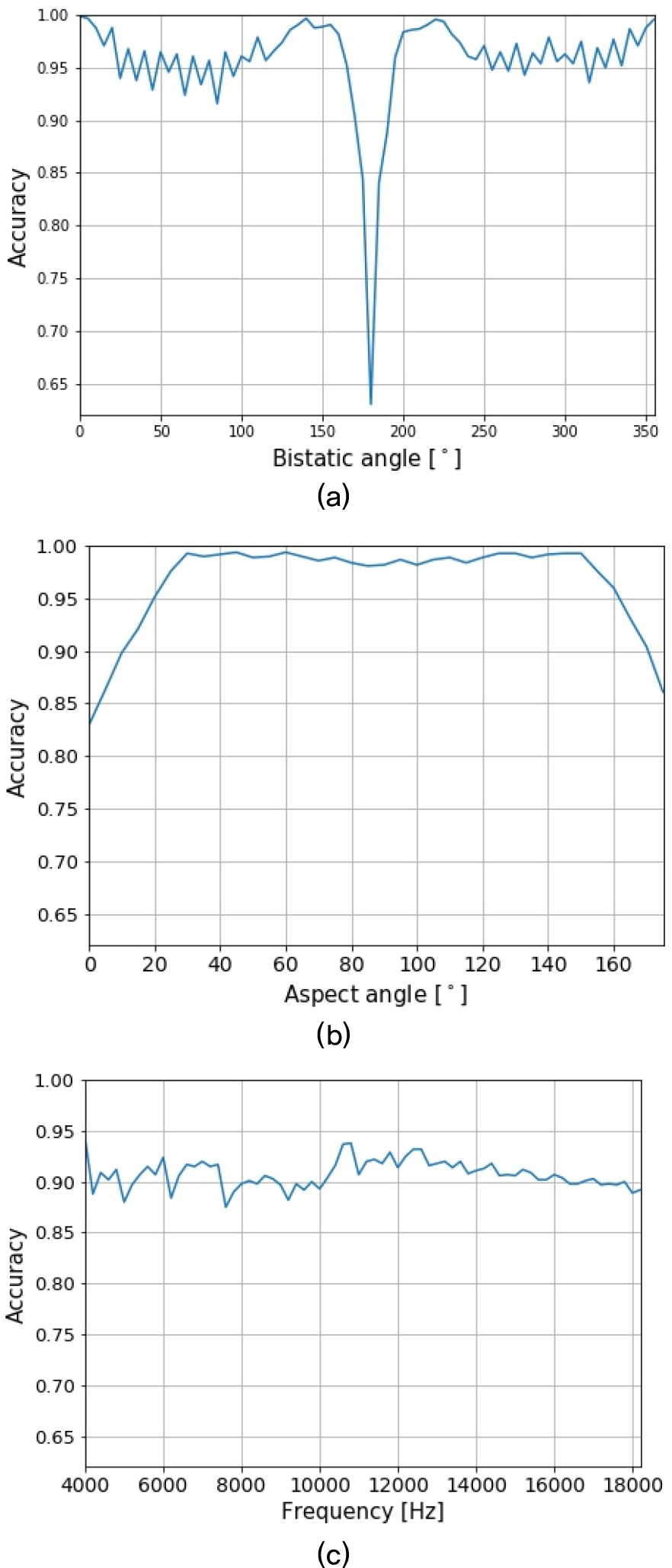
Fig. 7.
(Color available online) Sphere and cylinder classification accuracy using (a) aspect angle- frequency scattering strength, average accuracy is 0.957 (b) bistatic angle-frequency scattering strength, average accuracy is 0.967 (c) aspect angle-bistatic angle scattering strength, average accuracy is 0.908.
양상태각-주파수 산란 강도 이미지는 고정된 자세각이 0-175°에 대한 분류 정확도가 Fig. 7(b)과 같이 나타났다. 자세각이 0°인 경우, 실린더의 밑면에 음파가 입사되어 실린더의 옆면에서 발생하는 산란이 산란 강도 이미지에 나타나지 않아 분류 정확도가 낮아졌다.
자세각-양상태각 산란 강도 이미지의 주파수에 따른 분류 정확도는 Fig. 7(c)에서 나타난 것처럼 주파수에 따른 차이가 크지 않았다. 자세각-양상태각의 산술 평균 분류 정확도는 약 0.908로 다른 운용 변수의 산란 강도 이미지를 이용한 분류 보다 정확도가 평균적으로 낮게 나타났다. 따라서 단일 주파수를 이용하여 모든 자세각과 양상태각에 대해 계측하여도 대역폭이 있는 신호를 이용한 경우보다 높은 분류 정확도를 기대하기 어렵다.
자세각-주파수의 산술 평균 분류 정확도는 약 0.957인 반면, 양상태각-주파수의 산술 평균 분류 정확도는 약 0.967로 조금 우세하였다. 양상태각 180°에서 자세각-주파수 산란 강도 이미지를 이용한 분류 정확도가 급격히 낮아졌기 때문이다.
V. 결 론
수중 표적의 음향 산란은 자세각, 양상태각, 주파수 등의 운용 변수를 이용하여 산란 강도 이미지로 나타낼 수 있다. 산란 강도 이미지를 이용하여 구와 실린더를 분류할 때, 자세각-주파수 산란 강도[Fig. 7(a)]보다 양상태각-주파수 산란 강도[Fig. 7(b)]를 이용하는 것이 평균 분류 정확도가 높았다. 자세각-주파수 산란 강도는 양상태각이 약 180°±20°인 경우를 제외하면 높은 분류 정확도를 기대할 수 있다[Fig. 7(a)]. 예를 들어 두 개의 자율 무인 잠수정으로 표적 산란을 측정할 때, 양상태각이 180°±20°가 아닌 각도를 유지하며 계측하면 높은 표적 분류 정확도를 기대할 수 있다.
양상태각-주파수 산란 강도는 자세각이 0°±20°인 경우 분류 정확도가 조금 감소하였다[Fig. 7(b)]. 즉, 하나의 고정된 음원과 하나의 자율 무인 잠수정을 이용하여 표적 산란을 측정 할 때, 음원이 실린더의 밑면을 바라보지 않는다면, 높은 표적 분류 정확도를 기대할 수 있다. 양상태각은 표적에 대한 정보가 부족해도 능동적으로 선택이 가능하지만, 자세각은 표적이 놓인 방향을 알아야 선택이 가능하다. 따라서 표적에 대한 정보가 부족한 경우 자세각-주파수 산란 강도를 이용하고, 표적의 자세를 알 때는 양상태각-주파수 산란 강도를 이용하는 것이 표적 분류에 효과적인 데이터를 얻을 수 있다. 본 연구를 토대로 표적 분류에 효과적인 데이터를 취득하기 위한 효율적인 실험을 계획할 수 있다.
본 연구에서 표적 실린더는 지름이 길이의 5분의 1 정도로 작은 경우를 가정하였다. 향후 연구에서는 실린더의 지름과 길이 비율과 같이 다양한 실린더의 제원에 따른 영향을 연구할 예정이다.
