

I. 서 론
1.1 소나 시뮬레이터 개요
1.2 소나 시뮬레이터 구조
II. 기동 모듈
2.1 3차원 좌표계
2.2 시뮬레이션 시간 간격과 변침률의 관계
2.3 도플러 효과 적용
III. 표적 소음 모델링
3.1 함정 소음 특성에 따른 분류
3.2 비변조 협대역 신호
3.3 변조 협대역 신호
3.4 비변조 광대역 신호
3.5 변조 광대역 신호
3.6 선박 방사 소음준위 모델링
IV. 소음 전달 모듈
V. 해양 배경 소음 모델링
VI. 자체소음 모델링
VII. 시나리오에 따른 모의 결과
6.1 기본 환경 설정
6.2 함정간 CPA 1000 m 통과 시
6.3 함정간 CPA 100 m 통과 시
VII. 결론 및 토의
I. 서 론

1.1 소나 시뮬레이터 개요
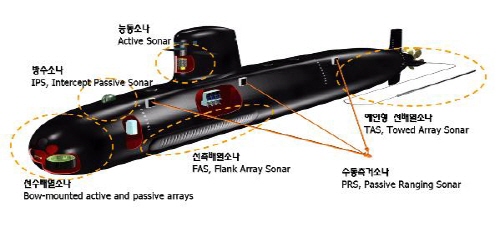
소나체계는 잠수함이 수중에서 은밀하게 활동하여 적 수상함이나 잠수함을 원거리에서 탐지 및 식별하고 공격할 수 있게 하는 핵심 탑재 장비이다. 현대 잠수함에서 운용하고 있는 소나체계에는 Fig. 1과 같이 선수소나, 방수소나, 선측배열소나, 예인선배열소나 등이 포함된다.[1] 소나체계의 임무를 컴퓨터를 이용하여 가상으로 구현한 도구를 소나 시뮬레이터(sonar simulator)로 정의한다.
소나 시뮬레이터는 실제 전장 환경에서 소나에 탐지되는 신호와 유사한 시계열 신호를 모델링하는 전산 알고리즘이다.[2] 소나 시뮬레이터는 소나체계의 목적, 탐색모드, 운용체계, 시뮬레이터의 목적 등에 따라 분류할 수 있다. 신호 모델링 알고리즘의 기술 수준에 따라 단순한 체계적응용 수신준위 예측 모델부터 복잡한 소나 배열센서의 시계열 신호 예측 모델까지 여러 종류가 개발된 상태이다.[2,4]
범용 소나 시뮬레이터 및 신호 모델링 알고리즘은 연구 목적으로 개발된 것이 대부분이다. 물리적인 기반위에 개발된 모델이므로 실시간 처리나 특정 소나체계에 대한 최적화의 측면에서는 약점을 갖고 있지만, 체계적용용 알고리즘을 개발하는데 기반 기술로 이용할 수 있고 소나 검증 및 모의 모델로 사용 가능하다. 기존 범용 소나시뮬레이터는 CASS/GRAB (Comprehensive Acoustic System Simulation/Gaussian Ray Bundles), SST (Sonar Simulation Toolset), SWAMI(Shallow Water Active sonar Modeling Initiative toolset), SUPREMO (Multistatic Sonar Performance Model), MODRAY (Maritime Operation Division Ray tracer), AWESIM(All World Environmental Simulation) 등이 개발되었으며, Cron/Sherman 모델, Chapman 모델, Buckingham 모델, Kuperman/Ingenitio 모델, CANARAY, RANDI 등은 해양 소음을 모의할 목적으로 개발되었다.[4]
범용 시뮬레이터 알고리즘은 논문이나 문헌에 다수가 공개되어 있으나, CASS/GRAB, SST 등 작전 시나리오 환경에서 능동, 수동 다종 소나를 모델링할 수 있는 고수준의 범용 시뮬레이터는 공개되어 있지 않다.[3]
물리적으로 해양환경에서 수신되는 소나 신호는 발생 요인에 따라 능동 표적 신호, 잔향음, 해양 소음으로 분류할 수 있다.[2-4] 해양 소음은 능동 표적 신호와 잔향음 이외의 신호를 의미하며 인위적 또는 자연 배경 소음, 함정 자체소음, 표적 소음 등으로 나뉠 수 있다.
소나가 수동모드(passive mode)로 구동하는 경우 표적 소음이 중요한 역할을 한다. 표적 소음은 엔진류, 추진기류, 배관계류 등에서 발생하는 소음으로 함정에 따라 고유의 특성을 갖고 있다. 해양 소음 신호 또한 수동모드에서 탐지될 수 있다.[5-6] Urick[7]이 제시한 수동소나 방정식은 식(1)과 같으며, 표적 소음원이 잠수함의 수동소나에 수신될 때 과정을 나타낸 것이다.
 .
.여기서  는 신호초과이득(Signal Excess),
는 신호초과이득(Signal Excess),  은 음원 준위(Source Level),
은 음원 준위(Source Level),  은 전달손실(Transmission Loss),
은 전달손실(Transmission Loss),  은 배경 소음(Noise Level),
은 배경 소음(Noise Level),  는 방향 지수(Directivity Index),
는 방향 지수(Directivity Index),  는 탐지 한계치(Detection Threshold)이다.
는 탐지 한계치(Detection Threshold)이다.
본 연구에서는 실제 전장 환경에서 잠수함 수동 소나에 탐지되는 유사한 신호를 모의하기 위해 수동소나 방정식의 표적음원, 전달손실, 해양 배경 소음 등을 이용하여 기존 연구된 이론과 실험적 사실에 근거 한 알고리즘을 제시하였다.
1.2 소나 시뮬레이터 구조
본 연구에서는 수동 소나 시뮬레이터의 알고리즘을 제시하기 위해 크게 기동 모듈, 소음원 모듈, 소음 전달 모듈 3가지 모듈로 나누었다. 함정의 기동에 따른 전장 시나리오를 구현하는 기동모듈은 시간에 따라 수신기와 음원의 거리를 계산하여 소음 전달 모듈의 거리 입력변수로 사용하고, 수신기와 음원간 상대각은 도플러 효과에 이용한다. 소음원 모듈은 표적 소음, 해양 배경 소음, 자체소음으로 구성되어 있다. 표적 소음이 소나에 수신될 때 전달과정은 소음 전달 모듈로 모의하였다. 또한 입력 변수에 따른 해양 배경 소음, 자체소음을 고려하여 최종적으로 수동 소나에 수신되는 신호를 모의하였다. 수동소나 시뮬레이터에서 시나리오에 따른 입력 변수들을 설정하게 되는데, 상세 값은 Table 1과 같다.
본 논문의 구성은 다음과 같다. 제2장에서는 기동 시나리오에 따른 좌표계, 시뮬레이션 시간 간격, 도플러 효과의 알고리즘을, 제3장에서는 표적 소음에 대한 알고리즘을 제시한다. 제4장에서는 소음원이 소나에 전달될 때까지 과정을 나타낸 소음 전달 모듈에 대해서 제시한다. 제5장에서는 해양 배경 소음 알고리즘을, 제6장에서는 자체소음 중 유체소음과 소나 돔 삽입 손실에 대한 알고리즘을 제시한다. 제7장은 시나리오에 따른 모의 결과에 대해서 설명하고 제8장은 본 논문의 결론 및 토의에 대한 내용이 제시된다.
II. 기동 모듈
2.1 3차원 좌표계
시뮬레이터에서 함정의 변침, 변속, 심도 변경 등 복잡한 운동을 고려해야 하므로 3차원 좌표계를 고려하였다. Fig. 2와 같이 잠수함이 3차원 기동 시  ,
,  ,
,  각 축에 대한 속력은 식(2), (3), (4)와 같이 나타낼 수 있으며, 음원, 수신기의 속도 벡터는 식(5), (6)과 같다.
각 축에 대한 속력은 식(2), (3), (4)와 같이 나타낼 수 있으며, 음원, 수신기의 속도 벡터는 식(5), (6)과 같다.
 ,
, ,
, ,
, ,
, .
.음원과 수신기는 속도 벡터를 고려하여 시간 에 따른 위치를 식(7), (8)로 나타낼 수 있으며, 음원에서 수신기의 거리 벡터 차는 식(9)로, 수신기에서 음원의 거리 벡터 차는 식(10)으로 나타낼 수 있다. 또한 음원과 수신기간 거리는 거리 벡터 차의 절대값인 식(11)로 나타낼 수 있다. 음원과 수신기간 거리 벡터와 속도 벡터, 상대각의 관계는 식(12), (13)으로 나타낼 수 있으며, 이를 변형하여 수신기에서 보는 음원의 수평각은 식(14)로, 음원에서 보는 수신기의 수평각은 식(15)로 나타낼 수 있다.
 ,
, ,
, ,
, .
. ,
, ,
, ,
, ,
, .
.여기서  ,
,  ,
,  은 음원의 최초 위치,
은 음원의 최초 위치,  ,
,  ,
,  는 수신기의 최초 위치이다,
는 수신기의 최초 위치이다,  는 시뮬레이션의 시간이다.
는 시뮬레이션의 시간이다.
2.2 시뮬레이션 시간 간격과 변침률의 관계
기동 모듈에서 함정의 변침률도 적용하였다. 일정 속력에서 변침률이 높을수록 변침 이동거리는 줄어드나 선회경은 늘어나고, 변침률이 작을수록 이동거리는 늘어나나 선회경은 줄어든다. 또한 일정한 변침률에서 속력이 증가할수록 변침 이동거리는 늘어난다. 변침률은 식(16)으로 나타낼 수 있으며, 변침 완료시 선회경은 식(17)과 같다. 또한 변침이동거리는 식(18)과 같다. 따라서 시뮬레이션의 시간 간격을 함정 제원에 따른 변침률을 고려하여 설정한다.
 ,
, ,
, .
.여기서  는 변침 시작시 침로,
는 변침 시작시 침로,  는 변침 완료시 침로,
는 변침 완료시 침로,  는 함정 속도,
는 함정 속도,  는 변침 시간이다.
는 변침 시간이다.
2.3 도플러 효과 적용
이동하는 음원과 수신기는 상대적인 속도 차이로 인해 협대역 신호에서 도플러 효과 현상이 발생한다. 식(19)와 같이 시간에 따른 음원과 수신기의 속도, 상대각을 고려하고 도플러 비를 계산하고 기본주파수에 곱해주면 협대역 주파수의 변화를 모의할 수 있다.[5-6]
 .
.여기서  는 수층 음속,
는 수층 음속,  은 음원의 속도,
은 음원의 속도,  은 수신기의 속도,
은 수신기의 속도,  은 수신기에서 보는 음원의 수평각,
은 수신기에서 보는 음원의 수평각,  은 음원에서 보는 수신기의 수평각,
은 음원에서 보는 수신기의 수평각,  는 시뮬레이션의 시간이다.
는 시뮬레이션의 시간이다.
III. 표적 소음 모델링
3.1 함정 소음 특성에 따른 분류
Deaett[8]는 소나에 수신될 수 있는 여러 가지 소음원 신호들을 발생 원리와 주파수 특성에 따라 분류하여 모델링 하였다. 표적 소음은 비변조 협대역(un-modulated narrowband) 신호, 변조 협대역(modulated narrowband) 신호, 비변조 광대역(unmodulated broadband) 신호, 변조 광대역(modulated broadband) 신호 4가지의 개별 음원으로 구분할 수 있다. 함정에서 발생하는 기계류 소음, 유체 소음, 캐비테이션 소음, 울림 소음(singing noise) 등 다양한 소음들은 4가지 종류의 신호로 구분되었으며, 식(20)과 같이 시간영역에서 합하였다.
 .
.여기서  는 비변조 협대역 신호,
는 비변조 협대역 신호,  는 변조 협대역 신호,
는 변조 협대역 신호,  는 비변조 광대역 신호,
는 비변조 광대역 신호,  는 변조 광대역 신호,
는 변조 광대역 신호,  는 종합된 표적 소음이다.
는 종합된 표적 소음이다.
3.2 비변조 협대역 신호
비변조 협대역 신호는 함정 소음원 중 회전 또는 왕복 운동을 하는 토날(tonal) 신호를 모델링한 것이다. 함정에서 크랭크축의 회전운동과 피스톤의 상하 운동, 연료 발화, 엔진구동 보조장치 등에 의해 소음이 발생하는데, 크랭크축의 작은 불균형으로 인해 발생한 함정소음 인자를 CSR(Crank Shaft rate)이라 하며, 엔진 RPM(Rotation Per Minute)과 관계는 식(21)과 같다.[5-6]
CFR(Cylinder Firing Rate)은 실린더 내에서 공기와 혼합된 연료의 폭발에 의하여 발생되는 디젤엔진 소음 인자이며, 1 초 동안 1개 실린더의 폭발 횟수로 정의된다. 2행정 엔진에서는 실린더의 한번 폭발에 의해 크랭크축이 1회전하며, 4행정 엔진에서는 한번 폭발에 의해 크랭크축이 2회전하기 때문에 CFR은 식(22)와 같이 나타낼 수 있다.[5-6]
EFR(Engine Firing Rate)은 1 초 동안 전체 실린더의 폭발율이며, 식(23)과 같이 CFR과 실린더 개수(NOC, Number Of Cylinder)의 곱으로 나타낼 수 있다.
PSR(Propeller Shaft Rate)은 초당 프로펠러 축의 회전수로서 CSR에 식(25)의 프로펠러 감쇄비를 적용한 후 식(24)와 같이 낼 수 있으며, BR(Blade Rate)은 초당 프로펠러 날개의 통과 회전수로서 식(26)과 같이 PSR에 날개 개수(NOB, Number Of Blade)를 곱하여 나타낼 수 있다.
 ,
, ,
, ,
, ,
, ,
, .
.비변조 협대역 신호는 소음원의 기본 주파수와 배음(harmonic) 성분에 대한 신호준위를 설정하여 원하는 신호를 식(27)과 같이 나타낼 수 있다[5,6,8].

여기서  는 진폭,
는 진폭,  는 기본주파수,
는 기본주파수,  는 초기 위상이다.
는 초기 위상이다.
3.3 변조 협대역 신호
변조 협대역 신호 중 대표적인 소음은 프로펠러 싱잉소음(propeller singing noise) 이다. 싱잉 소음은 프로펠러 날개를 진동시키는 동유체력(hydrodynamic forces)에 의해서 발생한다. 대부분의 프로펠러 날개 울림은 소용돌이의 영향력이 가장 지배적이고, 울림에 의해 100~1000 Hz의 주파수 대역에서 프로펠러 날개의 공진 주파수(resonance frequency)와 일치하는 주파수가 발생하는데, 이는 강한 주파수선 특성과 협대역의 진폭 변조된 신호특성을 가진다.[5] 따라서 프로펠러 싱잉 소음과 같은 변조 협대역 신호는 식(28)과 같이 모의 될 수 있다.

여기서  는 진폭,
는 진폭,  는 기본주파수,
는 기본주파수,  는 초기 위상,
는 초기 위상,  는 진동주파수이다.
는 진동주파수이다.
3.4 비변조 광대역 신호
비변조 광대역 신호의 대표적인 소음은 광대역에 걸쳐 나타나는 유체소음(flow noise)이다. 유체소음은 함정과 유체의 거친 마찰에 의하여 주로 발생하며, 또한 유체흐름의 압력파가 선체 진동주파수와 공진될 때 선체공진(hull resonance) 소음이 발생되기도 한다.[5]
유체소음은 표적의 속도에 의존하며, 속도 증가에 따른 주파수 스펙트럼의 변화를 모델링한다. 비변조 광대역 신호는 1/ 3 옥타브 별로 주파수 대역을 나누어, 각 대역별로 이득제어를 통해 구현하였으며, 식(29)와 같이 나타낼 수 있다.[5,8]
 .
.여기서  는
는  번째 1/3 octave filter 이득,
번째 1/3 octave filter 이득,  는
는  번째 1/3 octave filter 계수,
번째 1/3 octave filter 계수,  는 noise sample이다.
는 noise sample이다.
3.5 변조 광대역 신호
변조 광대역 신호의 대표적인 소음은 캐비테이션 소음(cavitation noise)이다. 수중에서 프로펠러의 날개가 고속으로 회전할 때 후방의 압력이 감소하여 압력차가 발생한다. 이로 인하여 무수히 많은 기포들이 만들어 지고, 압력의 차이가 클수록 기포들은 더욱 커진다. 이러한 기포들은 수면으로 상승하고 압력상태가 초기상태로 돌아오면서 소멸된다. 이 때 날카로운 캐비테이션 소음이 발생된다.
프로펠러 캐비테이션 소음은 진폭 변조(amplitude modulation) 된 광대역 신호로서 식(30)과 같이 PSR과 BR의 신호를 프로펠러 광대역 신호에 곱하여 줌으로써 모의할 수 있다[5,6,8].

여기서  는 진폭,
는 진폭,  는 기본주파수,
는 기본주파수,  는 filter 계수,
는 filter 계수,  는 noise sample이다.
는 noise sample이다.
3.6 선박 방사 소음준위 모델링
선박 방사 소음준위는 프로펠러 소음이 큰 비중을 차지하며, 속력에 따라서 증가하는 경향을 보인다. Ross[9]는 2차 세계대전 중 미국, 캐나다, 영국의 선박의 측정된 방사소음을 분석한 후 선박에 공통으로 적용될 수 있는 종합적인 소음준위를 도출하였다.
이러한 소음준위는 100 Hz에서 10 kHz까지의 주파수 범위에 적용되며, 3만 톤 이하의 함정에 적용되는 한계가 있다. 속력과 배수톤수에 의존적인 선박 방사 소음준위  는 식(31), (32)와 같이 나타내며, 주파수에 의존하는 소음준위
는 식(31), (32)와 같이 나타내며, 주파수에 의존하는 소음준위  는 식(33)과 같다.
는 식(33)과 같다.
 ,
, ,
, .
. < 10 kHz)
< 10 kHz)여기서  는 함정속력(m/s),
는 함정속력(m/s),  는 함정의 배수톤수(ton),
는 함정의 배수톤수(ton),  는 주파수(Hz)이다.
는 주파수(Hz)이다.
IV. 소음 전달 모듈
소음 전달 모듈은 실제 해양환경에서 표적에서 발생한 소음원이 소나에 전달될 때의 과정을 모의한 것이다. 본 연구에서는 음선 모델을 이용하여 사각 격자법(rectangular cell method)과 층 법(layer method)으로 음선을 추적하였다.[10] 수층으로 둘러싸인 영역은 사각형 요소(rectangular cell)를 사용하고 해저면에 접하는 영역은 다각형 요소(polygon cell)를 적용했다.
전체 음선에서 n 종류의 음선 묶음,  번째 음선은 식(34)와 같이 나타낼 수 있으며, 수신 센서 위치에서 전체 음장 및 시계열 신호는 식(35),(36)과 같이 나타낼 수 있다.
번째 음선은 식(34)와 같이 나타낼 수 있으며, 수신 센서 위치에서 전체 음장 및 시계열 신호는 식(35),(36)과 같이 나타낼 수 있다.
 ,
, ,
, ,
, .
.여기서  은 음원에서 수신기까지 거리,
은 음원에서 수신기까지 거리,  수신기 수심,
수신기 수심,  는 각주파수,
는 각주파수,  는
는  번째 고유음선의 진폭,
번째 고유음선의 진폭,  는
는  번째 고유음선의 시간지연,
번째 고유음선의 시간지연,  는
는  번째 고유음선의 위상차,
번째 고유음선의 위상차,  는 표적 소음 압력이다.
는 표적 소음 압력이다.
본 소음 전달 모듈의 특징은 음선 묶음의 보간법을 통해 고유 음선을 계산하였으며, GRAB의 가상 음선법 적용하였다[10]. 또한 음영 구역/특이점 근방에서 해석이 가능하다. 음속구조는 PE(Parabolic Equation) 방식의 거리의존 음속구조로 구현하였으며,  선형 음속구조에 대한 Cell 법을 적용하였다. 음선 크기에서 회절영향을 반영하고, 슬로우니스(slowness)를 음선 계산의 주요 변수로 사용하였다.
선형 음속구조에 대한 Cell 법을 적용하였다. 음선 크기에서 회절영향을 반영하고, 슬로우니스(slowness)를 음선 계산의 주요 변수로 사용하였다.
변침률의 시간간격을 적용한 기동 모듈의 각 시간에서 식(37)과 같이 고유 음선의 진폭, 위상, 시간 지연을 합산하였다. 또한 주파수 영역에서 표적 소음 신호와 소음 전달 모듈을 곱해주면 최종적인 수동 소나 신호를 생성할 수 있다.
V. 해양 배경 소음 모델링
해양 배경 소음은 잠수함이 표적을 탐지 시 장애요소로 작용한다. 해양 배경 소음은 크게 난류 소음, 원거리 항행선박 소음, 바람 소음, 난류소음으로 나뉘어진다.[7] 각 소음들은 서로 다른 주파수 대역 별로 우세한 영향을 미친다. Wenz[11]는 대양 심해에서 발생하는 해양 배경 소음을 식으로 정리하였으며, 최 등[12]은 한반도 주변해역의 측정 배경소음에 근거하여 Wenz Curve[11] 식을 응용한 식을 도출하였다. 여기서 식(38)은 해양 배경 소음 준위의 총합, 식(39)는 난류 소음 준위, 식(40)은 원거리 항행선박 소음, 식(41), (42)는 바람 소음, 식(43)은 열소음이다.


 ,
,



 ,
, .
.여기서  는 주파수,
는 주파수,  는 바람 속력,
는 바람 속력,  는 9마일 내의 근거리 항행선박밀도(0 : 9마일 내 선박이 없는 경우, 1 : 9마일 내에 평균적으로 선박 4척이 존재하는 경우),
는 9마일 내의 근거리 항행선박밀도(0 : 9마일 내 선박이 없는 경우, 1 : 9마일 내에 평균적으로 선박 4척이 존재하는 경우), 는 먼 거리 항행선박 밀도(0~4 : 밀도와 선박수와의 관계는 임의적임)이다.[12]
는 먼 거리 항행선박 밀도(0~4 : 밀도와 선박수와의 관계는 임의적임)이다.[12]
한편 배경소음 중 바람소음은 100 Hz~10 kHz 주파수 대역인 잠수함 소나의 주 수신 대역에서 우세한 영향을 미친다. 바람 소음은 최 등[12]이 제시한 바람 소음 준위을 이용하고 음향도파관 효과(waveguide effect)를 고려하여 모의하였다. 여기서 해양 환경은 Fig. 3과 같이 등속 및 반무한 해양 영역을 가정하고 바람 소음은 쌍극자 음원(dipole source)으로 설정하였다.[13]
바람 소음의 소음 준위는 식(44)로, 쌍극자 음원 압력(dipole source pressure) 합은 식(45)로 나타낼 수 있다. Bannister 등[14], Wilson[15] 은 측정된 무지향 바람 소음 준위를 표면 음원 준위로 전환하는 식(46)을 도출하였으며, 식(47)과 같이 음파 세기로 변환할 수 있다.
 ,
,
 ,
, .
.여기서  는 소음원 음파 세기(intensity),
는 소음원 음파 세기(intensity),  는 바람 소음의 수면 영역 넓이,
는 바람 소음의 수면 영역 넓이,  는 음원과 수신기간 수평거리,
는 음원과 수신기간 수평거리,  은 소음원의 깊이,
은 소음원의 깊이,  은 수신기의 깊이,
은 수신기의 깊이,  는 파수이다.
는 파수이다.
Fig. 4에서 보듯이 바람소음의 수면 영역에 대한 적분은 식(48), (49)와 같이 설정한다.
 ,
, .
.여기서  는 수면구역 등분각도,
는 수면구역 등분각도,  은 수면구역 등분간격,
은 수면구역 등분간격,  는 각 호의 가로길이,
는 각 호의 가로길이,  은
은  로 등분한 수면구역,
로 등분한 수면구역,  는 바람소음의 총 수면구역이다.
는 바람소음의 총 수면구역이다.
바람소음 준위의 수렴도 테스트 모델링(convergence test modeling) 결과, 적분의 최대거리 max(r)은 5 km 이상에서 수렴하였으며, 거리간격  은 10 m 이하 간격으로 등분 시 수렴하였다.
은 10 m 이하 간격으로 등분 시 수렴하였다.
최종적으로 식(38)과 같이 음향도파관 효과가 고려된 바람소음 준위를 응용하여 해양 배경 소음 준위를 모의 할 수 있다.
VI. 자체소음 모델링
자체소음은 함정의 이동에 의해 소나에 영향을 주는 소음원으로서 유체소음, 기계류 소음, 전기 소음, 프로펠러 소음, 선체 진동소음 등이 있다.[7]
자체소음 중 함정 속력의 증가에 따라 함수 소나에 가장 우세한 영향을 미치는 소음은 유체소음이다. Skudrzyk 등[16]은 1 인치 수중청음기를 이용한 실험을 통해 유체소음을 경험식으로 얻었다.
유체소음 준위는 식(50)과 같이 전이 주파수 이전까지 일정하게 유지되고 전이 주파수 이후 주파수의 3제곱에 반비례하여 감소하는 경향을 보였다.[17] 전이 주파수는 식(51)과 같이 나타낼 수 있으며, 경계층 두께는 식(52)와 같으며, Skudrzyk 등[16]은 유체속력 6.096 m/s에서 0.003886 m를, 18.288 m/s에서 0.003429 m를 도출하였다.
 ,
, ,
, .
.여기서 ����는 Kraichnan 상수로 통상 1로 가정하며, ����는 유체 밀도, U는 유체 속력,  는 주파수,
는 주파수,  는 전이주파수,
는 전이주파수,  는 경계층 두께 변화량,
는 경계층 두께 변화량,  는 거칠기 높이이다.
는 거칠기 높이이다.
Corcos 등[18]은 수중청음기의 크기가 2 배씩 증가할 때 마다 유체소음이 약 6 dB가 감소하는 것을 확인하였다. 또한 Urick[7]도 유체소음 감소를 위한 방법으로 수중청음기의 크기 증가, 진행방향에 수중청음기 위치, 난류 경계층으로부터 수중청음기의 제거 등을 제시하였다. 따라서, 잠수함에서 유체 소음이 유발되는 장비인 함수 소나돔의 크기를 직경 6 m라고 가정하고 유체소음 감소를 위한 다양한 환경을 개선 시 Skudrzyk 실험식에 비해 약 50 dB의 준위가 감소할 것이다. 그러나 본 경험식에 의한 유체소음 예측은 유발장비 주변에 발생하는 유체 소음이 소나 돔 내부 수중청음기에 전달될 때의 과정을 수치적으로 제시한 방법[19]과 비교 시 정확도 측면에서 한계가 있다.
유체소음은 잠수함 소나에 직접적으로 수신되지 않고 소나돔을 투과하여 수신된다. 유체소음이 소나에 수신되는 과정 중 물의 매질에서 소나돔 매질을 투과하여 물의 매질로 전달 될 때 삽입 손실(IL, Insertion Loss)이 발생한다. 삽입 손실은 식(53)과 같이 입사하는 음압과 투과하는 음압의 비를 로그 단위로 취해 나타낼 수 있다. 각 층의 경계면 조건에서 음파가 매질을 통과할 때 Brekhovskikh[20] 가 이용한 음압의 식을 응용하면 식(54)와 같이 음압의 투과계수를 구할 수 있다. 식(55)에서 보듯이 투과 계수에 로그 함수를 취하면 삽입 손실을 계산할 수 있다.
 ,
,
 .
.여기서  는 감쇠계수(Np/m),
는 감쇠계수(Np/m),  는 소나돔 두께,
는 소나돔 두께,  는 소나돔의 파수,
는 소나돔의 파수,  은 유체밀도,
은 유체밀도,  는 소나돔 밀도,
는 소나돔 밀도,  은 유체음속,
은 유체음속,  는 소나돔 음속이다.
는 소나돔 음속이다.
본 연구에서는 삽입 손실 설정에서 입력변수를 소나돔의 매질인 GRP(Glass Reinforced Plastic)의 물리적 특성[21]을 반영하여 삽입 손실을 구하였다.
VII. 시나리오에 따른 모의 결과
6.1 기본 환경 설정
현재까지 제시하였던 기동 모듈, 소음원 모듈, 소음 전달 모듈 등을 적용하여 시나리오에 따른 소나 수신 신호를 모의하여 보았다. Fig. 5(a)와 같이 얕은 수심 해역을 기준으로 수신기 수심은 30 m, 음원 수심은 10 m로 설정하였으며, 바닥 정보는 평평한 해저면의 수심 64 m, 재질은 모래, 음속은 1650 m/s, 밀도는 1900 kg/ , 흡입 손실계수는 0.8 dB/
, 흡입 손실계수는 0.8 dB/ 로 설정하였다. 또한 수층 음속 구조는 Fig. 5(b)와 같이 설정하였다.
로 설정하였다. 또한 수층 음속 구조는 Fig. 5(b)와 같이 설정하였다.
| |
(a) | (b) |
Fig. 5. Geometry of ocean environment. (a) ocean environment input variables and (b) sound speed profile. | |
소음원 모듈 중 표적 선박 소음은 3만 톤의 선박을 음원으로, 해양 배경 소음은 바람 속력 10 kts, 원거리 항행 선박의 밀도 0으로 설정하였다. 기동 모듈은 총 12분간 시간간격 6초로 두가지 케이스에 대해서 진행하였다. 첫 번째는 CPA(Closest Point of Approach) 1000 m 통과할 경우와 두 번째는 CPA 100 를 통과할 경우이다.
6.2 함정간 CPA 1000 m 통과 시
첫 번째 케이스는 Fig. 6(a)와 같이 두 함정간 CPA 1000 m를 두고 통과하는 경우이다. 스펙트로그램 모의 결과 표적 소음은 Fig. 7(a), 해양 배경 소음은 Fig. 7(b), 유체소음은 Fig. 7(c), 종합적인 소나 수신 소음은 Fig. 7(d)과 같이 나타났다. 여기서 표적 소음의 광대역 신호는 McKenna 등[22]의 실험결과에서 나타났던 베쓰튜브(bathtub) 간섭 패턴 형상을 보였으며, 협대역 신호는 주파수 18, 37, 449 Hz에서 상대적으로 큰 준위와 도플러 효과 현상을 확인할 수 있었다. 또한 종합적인 수신 신호에서는 표적 소음이 해양 배경 소음 및 유체소음에 가려지나, 상대적으로 큰 광대역 간섭 패턴 변화 및 협대역 주파수 신호를 확인할 수 있다.
| |
(a) | (b) |
Fig. 6. Geometry of maneuver by passing between source and receiver. (a) CPA 1000 m and (b) CPA 100 m. | |
6.3 함정간 CPA 100 m 통과 시
두 번째 케이스는 Fig. 6(b)와 같이 두 함정간 CPA 100 m를 두고 통과하는 경우이다. 스펙트로그램 모의 결과 첫 번째 케이스와 비교 시 해양 배경 소음과 유체소음은 Figs. 8(b), 8(c)로 동일하며, 표적 소음은 Fig. 8(a), 종합적인 소나 수신 소음은 Fig. 8(d)로 광대역 신호의 간섭패턴이 다르게 나타났다. 광대역 신호의 간섭패턴은 파인 트리(pine tree) 형상으로 나타났으며, 상대적으로 기울기가 커졌다. 또한 도플러 효과가 적용 된 협대역 신호도 확인 할 수 있었다. 위의 두 케이스를 비교 한 결과 두 함정간 통과하는 거리가 가까울수록 간섭 패턴의 기울기가 커지며, 베쓰튜브 형상이 파인트리 형상으로 변화하는 것을 확인하였다.
VII. 결론 및 토의
본 논문에서는 잠수함 수동소나에 수신되는 실제와 유사한 신호를 모의하기 위해 수중에서 발생하는 각 소음원들의 알고리즘을 제시하고, 소음원들이 소음 전달 모듈을 통해 잠수함에 전달되는 과정을 모의하였다. 알고리즘은 크게 기동 모듈, 소음원 모듈, 소음 전달 모듈로 구분하였다. 소음원 모듈 중 표적 소음은 소음 발생 원리와 주파수 특성에 따라서 모의하였으며, Ross[9]의 함정 방사 소음 준위를 이용하였다. 해양 배경 소음은 최 등[12]이 제시한 한반도 주변 배경 소음 준위를 이용하고, 배경 소음 중 바람 소음은 음파 도파관 효과를 고려하여 모의하였다. 또한 자체소음 중 잠수함의 속력 증가에 따라 변화하는 유체소음 준위와 소나돔의 삽입 손실을 고려하였다. 소음 전달 모듈은 음선 모델을 사용하여 기동 모듈 시나리오의 각 시간마다 고유음선의 진폭, 위상, 시간지연을 합산하였으며, 주파수 영역에서 표적 소음과 소음 전달 모듈을 곱함으로써 수신신호를 모의하였다. 한편, 함정간 CPA 1000 m를 통과하는 경우와 CPA 100 m를 통과하는 경우에 대해서 모의 한 결과 광대역 신호에서는 베쓰튜브 형상과 파인트리 형상의 간섭패턴이 나타났으며, 협대역 신호에서는 도플러 효과가 적용된 신호가 나타나는 것을 확인하였다.
이와 같이 잠수함 수동소나 시뮬레이터를 위한 알고리즘을 제시함으로써 해양에서 잠수함에 수신되는 실제와 유사한 신호 스펙트럼을 모의하였다. 그러나 본 알고리즘은 검증을 위해 실제 실험 데이터 결과간 비교가 요구되며, 향후 보다 실제적인 해양환경에서의 수신 신호를 모의하기 위해 추가 연구를 함으로써 알고리즘 보완이 가능할 것으로 예상된다.
