I. 서 론
II. 시스템 모델링
III. IMM-IPDA 알고리듬
3.1 상호작용 과정
3.2 예측 과정
3.3 유효 측정치 선정 과정
3.4 쇄신 과정
3.5 조합 과정
IV. 시뮬레이션 연구
IV. 결 론
I. 서 론
능동소나는 음파신호를 수중 속으로 송신시켜, 수중표적의 선체에 맞고 반사되는 액티브 핑의 반사파를 수신함으로써 수중 속에서 적의 위치와 좌표를 탐지하는 소나 시스템이다. 수중표적을 탐지하기 위해서 고주파부터 저주파 까지 다양한 능동소나체계가 개발이 되어 지고 있다. 하지만 잠수함과 같은 저소음화, 고속화 고심도화 되어가는 수중표적을 탐지하기 위해서는 저주파 능동소나를 사용될 것이 요구되어 지고 있다. 저주파 음파를 만들어 내기 위해서는 중량이 몇 톤이나 되는 대형 트랜스듀서가 있어야 하는데, 이러한 대형 트랜스듀서는 선저 하부에 장착되기 어렵다는 문제가 있다. 이러한 이유로 수상함의 후부에서 견인되고, 송신기와 수신기가 분리되어 있는 저주파 능동 예인배열소나가 운용되어 지고 있다.
저주파 능동예인배열소나를 이용하여 표적추적을 수행하기 위해서는 획득되는 측정치에 적합한 모델링 설계가 요구된다. 저주파 능동예인배열소나의 경우 송신기와 수신기가 분리되어 있는 양상태 위치 오차 모델링[1]을 통해 측정치 모델링이 가능하다. 능동소나로부터 획득되는 측정치에는 표적의 정보뿐만 아니라 음파가 전달될 때 발생하는 해저면, 수중에서의 반사, 산란, 흡수 등 간섭현상에 의하여 생기게 되는 거짓정보인 클러터들이 다수 포함되어 있는데, 이러한 클러터들이 존재하는 환경에서 효율적으로 표적을 추적하기 위해서는 표적에 대한 정보를 효과적으로 추출하는 과정인 자료결합이 반드시 요구된다. 표적추적기법으로는 표적을 추적중인 트랙의 예측치를 중심으로 게이트 내에 존재하는 측정치들을 이용하여 트랙을 쇄신하는 PDA(Probabilistic Data Association)기법[2,3]에 트랙의 평가수단인 트랙존재확률을 부여하고 트랙존재확률에 따라 트랙을 계속 추적할 것인지 제거 할 것인지에 대한 판별을 하는 트랙관리 기반의 자료결합기법인 IPDA(Integrated Probabilistic Data Association)[4,5]을 통해 견실한 표적추적이 가능하다.
능동 예인배열소나를 운용하는 자함이 등속운동을 하면 앞에서 제시한 방법들을 그대로 적용하여 표적추적이 가능하지만, 자함이 기동하는 구간에서는 송신기와 수신기의 위치가 많이 흔들리기 때문에 소나로부터 획득된 측정치의 정보에 대한 신뢰도가 낮기 때문에 표적추적성능이 저하 될 수 있다.
본 논문에서는 자함이 기동하는 구간에서 획득된 측정치들의 낮은 신뢰도를 고려하여 공정잡음의 크기를 다르게 한 다수모델추적기법인 IMM(Interacting Multiple Model)[6-8]이 결합된 IMM-IPDA[9]를 통해 추적성능을 개선하고자 한다.
본 논문은 아래와 같이 구성되어 있다. II장에서는 표적의 동역학 모델링과 양상태 위치 오차 모델링이 설명되어 있으며 III장에서는 제안하는 IMM-IPDA 알고리듬에 대해 수록하였으며, IV장에서는 몬테칼로 시뮬레이션을 통한 성능분석을 나타내었으며 결론은 V장에 수록하였다.
II. 시스템 모델링
추적의 대상이 되는 표적의 상태변수를 추적하기 위해서는 칼만필터와 같은 동역학 필터를 사용하는데, 칼만필터를 사용하기 위해서는 추적의 대상이 되는 표적의 동역학 모델, 소나로부터 획득되는 측정치의 모델을 수학적으로 설계하는 것이 요구된다. 표적에 대한 상태 벡터는 기본적인 2차원 평면에서 위치, 속력 성분으로 구성되어 있고, Eq. (1)처럼 표현이 가능하다.
여기서  는 상태변수 천이 행렬이고, 등속도 모델(constant velocity model)을 적용한다고 가정하였다.
는 상태변수 천이 행렬이고, 등속도 모델(constant velocity model)을 적용한다고 가정하였다.  는 소나의 샘플링 타임을 의미하고,
는 소나의 샘플링 타임을 의미하고,  는 평균이 0이고 공분산 행렬이
는 평균이 0이고 공분산 행렬이  인 백색 가우시안 잡음이다.
인 백색 가우시안 잡음이다.  는 운용자가 설계한 동역학 모델에 대한 불확실성을 반영하는 파라미터로써 설계한 동역학 모델이 적절하다고 판단되면 작은 값으로 설정하고, 그렇지 않은 경우 큰 값으로 설정한다.
는 운용자가 설계한 동역학 모델에 대한 불확실성을 반영하는 파라미터로써 설계한 동역학 모델이 적절하다고 판단되면 작은 값으로 설정하고, 그렇지 않은 경우 큰 값으로 설정한다.
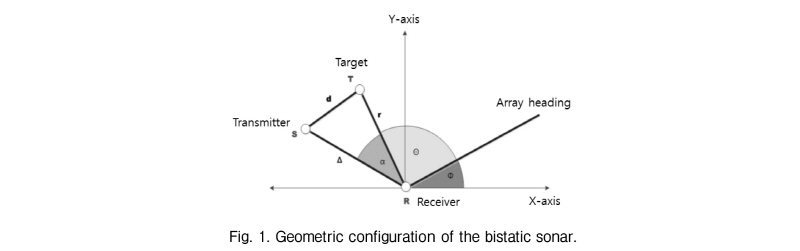
자함에 예인되는 능동소나는 송신기와 수신기가 분리되어 있는데, 이 소나로부터 획득되는 측정치의 오차는 송신기와 표적 수신기의 기하학적 관계에 의존하며, Fig. 1과 같다.
송신기에서 음파를 송신하여 표적을 맞고 돌아오는 신호가 수신기에서 받는다. 양상태 위치 오차 모델링과 관련된 파라미터로는 송신기에서 수신기까지의 음파도달 시간  , 수신기에서 표적까지의 표적방향각
, 수신기에서 표적까지의 표적방향각  , 수신기 축 방향인
, 수신기 축 방향인  , 음파의 평균속도
, 음파의 평균속도  , 송신기의 위치
, 송신기의 위치  , 수신기의 위치
, 수신기의 위치 가 있는데, 각 오차들은 서로 비상관하다고 가정한다. 양상태 소나로부터 획득되는 표적 측정치의 위치는 Fig. 1의 기하학적 관계에 따라 Eq. (2)로 표현이 가능하다.
가 있는데, 각 오차들은 서로 비상관하다고 가정한다. 양상태 소나로부터 획득되는 표적 측정치의 위치는 Fig. 1의 기하학적 관계에 따라 Eq. (2)로 표현이 가능하다.
Eq. (2)에는 표적의 실제 위치와 관련된 바이어스와 오차들이 모두 포함되어 있다. 표적 측정치에 대한 공분산 행렬은 Eq. (3) 과 같고, 각 성분은 Eqs. (4)~(6)에 나타나 있다.
 (3)
(3)



(6)
III. IMM-IPDA 알고리듬
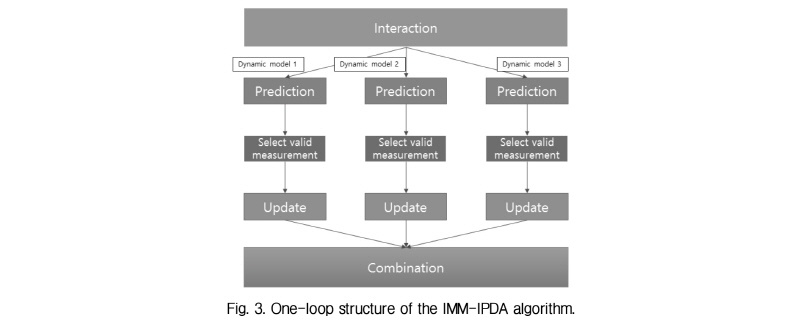
표적의 동역학 모델을 알 수 없는 환경에서 표적에 대한 단일모델기반의 추적알고리듬은 표적을 놓치는 경우가 생길 수 있다. 따라서 다수모델기반의 추적알고리듬인 IMM이 요구된다. IMM기법의 경우 표적의 다양한 동역학 모델을 다수로 설계하는 것뿐만 아니라 하나의 동역학 모델에 대해서 다른 공정잡음을 적용하는 방법도 존재한다. 양상태 소나를 운용하는 환경에서는 표적의 정보뿐만 아니라 거짓 정보인 다수의 클러터들이 입수되기 때문에 IMM기법을 사용할 때 표적과 클러터를 구분하는 자료결합기법이 요구된다. 본 논문에서는 트랙관리 기반의 자료결합 알고리듬에 다수모델필터 구조를 적용한 IMM-IPDA 알고리듬을 이용하였다. IMM-IPDA 알고리듬은 상호작용 과정, 예측 과정, 유효 측정치 선정 과정, 쇄신 과정, 조합 과정으로 나뉜다.
3.1 상호작용 과정
 시점에서 각 동역학 모델들이
시점에서 각 동역학 모델들이  시점에서는 어떤 모델로 천이되었는지를 확률적인 수식을 통해 얻어진다. Eq. (7)은
시점에서는 어떤 모델로 천이되었는지를 확률적인 수식을 통해 얻어진다. Eq. (7)은  시점에서 동역학 모델
시점에서 동역학 모델  이
이  시점에서
시점에서  번째 동역학 모델로 바뀔 확률인 모드천이확률로써 운용자가 필터 설계 시 설정하는 파라미터이다.
번째 동역학 모델로 바뀔 확률인 모드천이확률로써 운용자가 필터 설계 시 설정하는 파라미터이다.
 (7)
(7)
Eq. (8)은 mixing probability를 나타내고, Bayesian rule을 통해 얻을 수 있다.
Eq. (8)에서  는 모드천이확률을
는 모드천이확률을  는
는  시점에서
시점에서  모델에 대한 예측 모드확률을
모델에 대한 예측 모드확률을  은
은  시점에서
시점에서  모델에 대한 추정 모드확률을 의미하며,
모델에 대한 추정 모드확률을 의미하며,  는 Eq. (9)와 같다.
는 Eq. (9)와 같다.
모든 모델에 대한 상효작용을 통해 얻은 mixing probability를 가중치로 하여  시점에서의 각 모드별 추정 상태변수와 오차 공분산 행렬은 Gaussian mixture를 통해 혼합된 상태벡터와 오차공분산 행렬을 얻을 수 있고, Eq. (10)처럼 표현할 수 있다.
시점에서의 각 모드별 추정 상태변수와 오차 공분산 행렬은 Gaussian mixture를 통해 혼합된 상태벡터와 오차공분산 행렬을 얻을 수 있고, Eq. (10)처럼 표현할 수 있다.
위 식에서  은 운용자가 설계한 동역학 모델의 개수를 나타낸다.
은 운용자가 설계한 동역학 모델의 개수를 나타낸다.
3.2 예측 과정
IMM에서의 예측과정은 모든 모델에 대해서 Eq. (11)과 같이 칼만필터의 예측과정을 수행한다.

예측 과정에서 입력은 상호작용과정에서 산출된 mixed 상태벡터와 오차공분산 행렬이다. 트랙존재확률의 예측과정은 Markov Chain모델에 근거한다.
Eq. (12)에서  는
는  시점에서 표적이 존재하였고,
시점에서 표적이 존재하였고,  시점에서도 표적이 존재할 사건을,
시점에서도 표적이 존재할 사건을,  는
는  시점에서 표적이 존재하지 않았다가
시점에서 표적이 존재하지 않았다가  시점에서 표적이 존재할 사건을 의미한다.
시점에서 표적이 존재할 사건을 의미한다.
3.3 유효 측정치 선정 과정
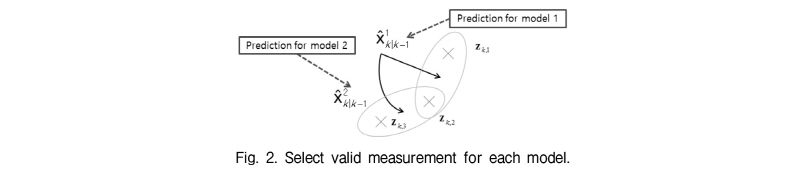
트랙의 각 모델별 예측치를 중심으로 쇄신에 사용할 유효 측정치를 선정하는 과정으로 측정치  가 Eq. (13)을 만족할 경우 해당 모델의 유효 측정치로 선정된다. 유효 측정치의 선정은 측정치와 각 모델의 예측치 사이의 statistical distance[10]를 이용한다.
가 Eq. (13)을 만족할 경우 해당 모델의 유효 측정치로 선정된다. 유효 측정치의 선정은 측정치와 각 모델의 예측치 사이의 statistical distance[10]를 이용한다.

Fig. 2는 각 모델별 유효 측정치 선정에 대해서 도시화한 것이다. 모델 1에서는 측정치  가 선정되었고, 모델 2에서는 측정치
가 선정되었고, 모델 2에서는 측정치  가 선정되었는데, 이 3개의 측정치 모두 최종적인 트랙의 유효 측정치가 된다.
가 선정되었는데, 이 3개의 측정치 모두 최종적인 트랙의 유효 측정치가 된다.
3.4 쇄신 과정
유효 측정치들을 이용하여 각 모델별 모드확률과 상태벡터, 오차 공분산 행렬을 쇄신하는 과정이다. 먼저 각 모드의 사후확률은 Eq. (14)와 같이 산출이 가능하다.
 은
은  모델의 유효 측정치 개수를 의미한다. 위 식에서
모델의 유효 측정치 개수를 의미한다. 위 식에서  는 측정치
는 측정치  에 대한 모델
에 대한 모델  의 사후확률이며 Eq. (15)처럼 표현된다.
의 사후확률이며 Eq. (15)처럼 표현된다.
 는 측정치
는 측정치  가 표적으로부터 기인했을 결합확률로써 Eq. (16)과 같다.
가 표적으로부터 기인했을 결합확률로써 Eq. (16)과 같다.
Eq. (16)에서  는 측정치
는 측정치  의 클러터 밀도를 의미하고,
의 클러터 밀도를 의미하고,  는 측정치
는 측정치  의 유사도를 나타내는데 각 모델 별 유사도
의 유사도를 나타내는데 각 모델 별 유사도  와 예측 모드확률의 Gaussian mixture로 산출된다.
와 예측 모드확률의 Gaussian mixture로 산출된다.

각 모델별 선정된 유효측정치의 결합확률은 Eq. (18)을 통해 얻을 수 있다.
앞에서 산출한 모델별 유효측정치의 결합확률을 이용하여 각 모델별 상태 벡터와 오차공분산 행렬을 얻을 수 있는데 Eq. (19)와 같다.
3.5 조합 과정
쇄신 과정에서 구한 각 모델의 상태변수, 오차공분산 행렬을 각 모드확률을 가중치로 하는 Gaussian mixture를 통해 최종적인 대표 추정치를 얻게 되며 Eq. (20)과 같다.
Eq. (20)에서 얻어진 값들은 최종적인 출력으로 다음 시점에서 입력으로 사용되지 않는다. N개의 모델이 존재할 경우 IMM 알고리듬은 N개의 추적필터가 수행하게 된다.
 (21)
(21)
Eq. (21)은 Update과정에서 얻은  를 이용해 트랙존재 사후확률을 산출하는 과정이다.
를 이용해 트랙존재 사후확률을 산출하는 과정이다.
Fig. 3은 IMM-IPDA의 one-loop 구조를 도시화 한 것이다.
IV. 시뮬레이션 연구
추적성능 분석을 위하여 500회의 몬테칼로 시뮬레이션을 수행하였고, 시뮬레이션 시간은 3,000 s이다. 저주파 능동예인소나를 운용하는 환경에 대한 시나리오는 Fig. 4와 같다.
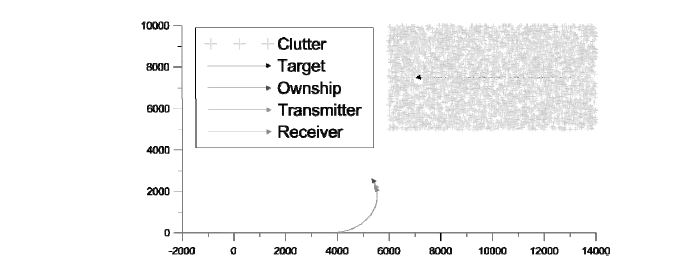
표적은 3 m/s로 등속 운동하고, 표적 궤적 주변에는 거짓 정보인 클러터들이 존재한다. 자함은 원점에서 시작하여 2.5 m/s로 등속 운동하다가 1500 s에서 자함이 0.08 °/s turn rate를 가지고 기동을 하기 시작한다. 송신기와 수신기는 자함으로부터 각각 300 m, 450 m떨어져 있으며 송, 수신기는 자함의 궤적을 그대로 따라 간다고 가정한다. 소나의 표적탐지확률은 0.8이고, 샘플링 타임은 30 s로서 매 스캔 마다 측정치 정보들이 입수된다. 클러터 밀도는 1 × 10-6으로 매 스캔 클러터 생성 평균 개수는 40개이다. 양상태 오차 모델링과 관련된 파라미터로는 음파도달시간 오차는 0.01 s, 음파속도 오차는 7.5 m/s, 송·수신기 위치 오차는 30 m, 각도 오차는 자함이 등속운동 할 때는 0.5°, 기동할 때는 1.5°로 설정하여, 자함이 기동할 때 측정치의 오차가 더 커지게 되는 환경을 구성하였다. Fig. 5는 양상태 소나로부터 획득된 표적 측정치의 오차를 거리로 환산하였을 때의 단일 시뮬레이션 결과이다.
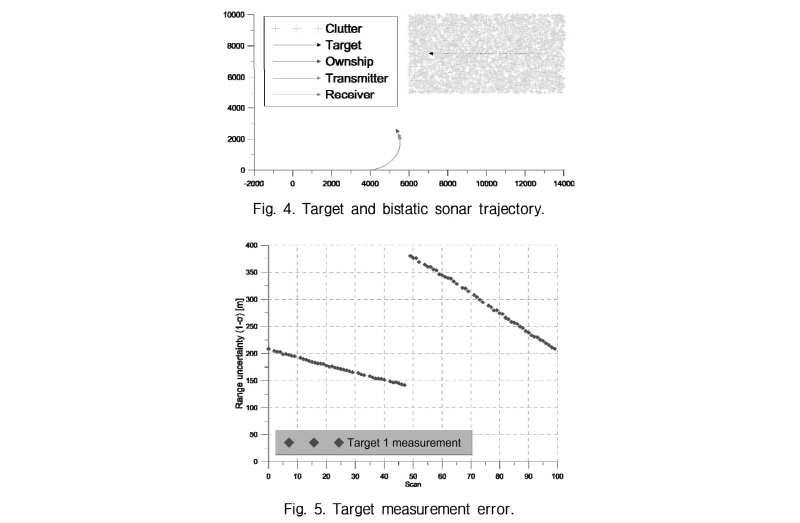
자함이 등속운동 하는 구간에서는 거리로 환산된 표적 측정치의 오차가 220 m에서 시작해서 대체로 낮지만 자함이 기동하는 구간인 50 scan이후로는 380 m 만큼 오차가 증가하는 것을 확인할 수 있다. 전체적으로 시간이 지날수록 오차가 감소하는 것을 볼 수 있는데, 이는 표적이 자함과 가까워지고 있기 때문이다. 자함이 기동하는 구간에서 표적 측정치의 오차가 클 때 추적 성능을 분석하기 위해 3가지 케이스에 대해서 시뮬레이션을 수행하였다.
▫공정잡음  의 단일모델 IPDA
의 단일모델 IPDA
▫공정잡음  의 단일모델 IPDA
의 단일모델 IPDA
▫공정잡음  의 다수모델 IMM-IPDA
의 다수모델 IMM-IPDA
IMM-IPDA의 경우 동역학 모델에 대한 모드천이확률은 Eq. (22)와 같이 설정하였다.
 (22)
(22)
표적추적 알고리듬의 성능지표로는 거짓트랙판별(False Track Discrimination, FTD)을 통해 수행되는데, 이는 추적을 수행 중인 모든 트랙들 중 트랙존재확률이 확정 문턱치 보다 높은 트랙들을 확정 트랙이라 정의하고 이 확정된 트랙들에 한해서 매 스캔마다 거짓트랙판별 과정을 수행한다. 확정트랙들 중 Eq. (23)을 만족하게 되면 표적을 추적중이라고 판단하여 CTT(Confirmed True Track)으로 분류된다.
 (23)
(23)
여기서  는 실제 표적의 상태벡터를,
는 실제 표적의 상태벡터를,  는 확정 트랙의 상태벡터를 나타내고,
는 확정 트랙의 상태벡터를 나타내고,  는 트랙이 생성될 시점에서의 오차공분산을 의미한다. 실제 표적과 거리 오차는 CTT에 대해서 산출하였다.
는 트랙이 생성될 시점에서의 오차공분산을 의미한다. 실제 표적과 거리 오차는 CTT에 대해서 산출하였다.
Figs. 6과 7은 FTD성능 지표인 Confirmed True Track Rate와 CTT에 대한 Range RMSE(Root Mean Square Error)를 그래프로 나타낸 것이다. 공정잡음이 큰 값 하나만 사용한 단일모델의 IPDA의 경우 공정잡음이 크기 때문에 추적이 제대로 수행되지 않다가 자함이 기동하는 구간 이후로 추적이 수행되는 것을 확인할 수 있다. 그리고 공정잡음이 작은 값 하나만 사용한 단일모델의 IPDA는 다수모델의 IMM-IPDA와 추적성능이 비슷하다가 자함이 기동하는 이후부터 추적성능의 저하가 생기는 것을 확인할 수 있다. 공정잡음을 작게 설정하게 되면 예측 오차 공분산 행렬의 값이 작게 되고 유효측정치 선정 과정에서 표적 측정치가 유효측정치로 선택되지 못하게 되는 경우가 발생하게 된다.
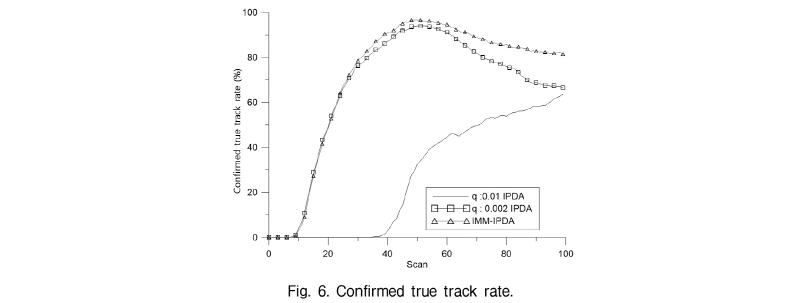
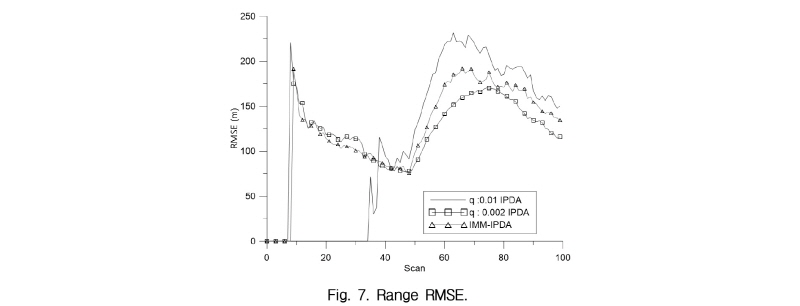
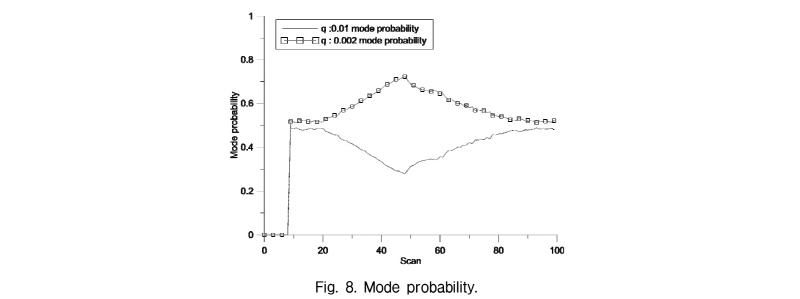
Fig. 8은 두 개의 공정잡음에 대한 모드 확률을 나타낸 것이다. 트랙이 생성될 때 두 모델에 대한 초기 확률 값은 0.5로 설정하였다. 자함이 등속운동 하는 구간에서는 공정잡음이 작은 모델에 모드 확률이 크지만, 자함이 기동하는 구간부터는 공정잡음이 큰 모델에 가중치가 증가하는 것을 확인할 수 있다.
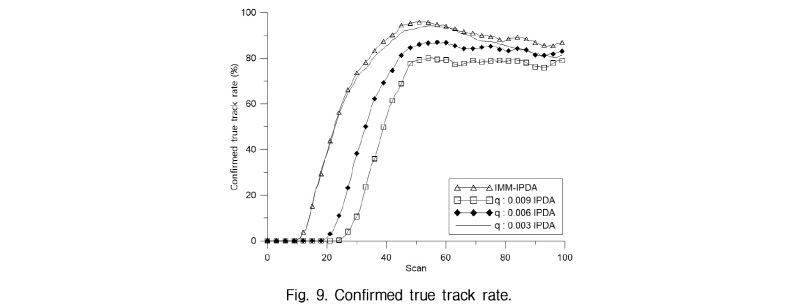
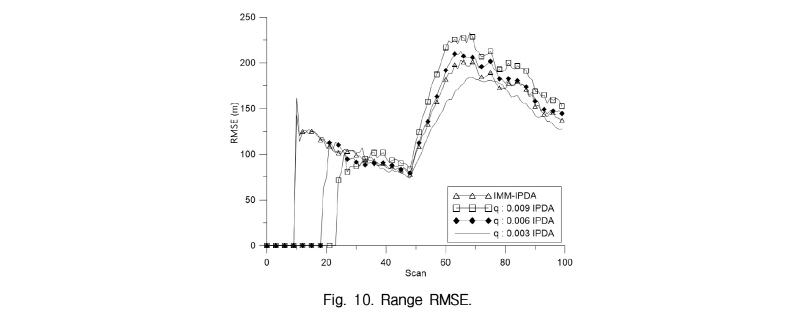
다음은 위와 동일한 시나리오에서 3가지의 서로 다른 공정잡음을 설정하여 시뮬레이션을 수행하였다. 각 케이스에 대한 공정잡음은 다음과 같이 설정하였다.
▫공정잡음  의 단일모델 IPDA
의 단일모델 IPDA
▫공정잡음  의 단일모델 IPDA
의 단일모델 IPDA
▫공정잡음  의 단일모델 IPDA
의 단일모델 IPDA
▫위 공정잡음 3가지 값 모두 사용한 다수모델 IMM-IPDA
Figs. 9와 10은 4 가지 케이스에 대한 CTT 빈도와 RMSE를 산출한 것이다. 상대적으로 공정잡음이 작은 값( )을 사용한 IPDA는 자함이 기동하지 않는 구간에서 성능이 좋지만, 자함이 기동한 이후로는 성능이 크게 감소하는 것을 확인할 수 있다. 반대로 상대적으로 공정잡음이 큰 값(
)을 사용한 IPDA는 자함이 기동하지 않는 구간에서 성능이 좋지만, 자함이 기동한 이후로는 성능이 크게 감소하는 것을 확인할 수 있다. 반대로 상대적으로 공정잡음이 큰 값( ,
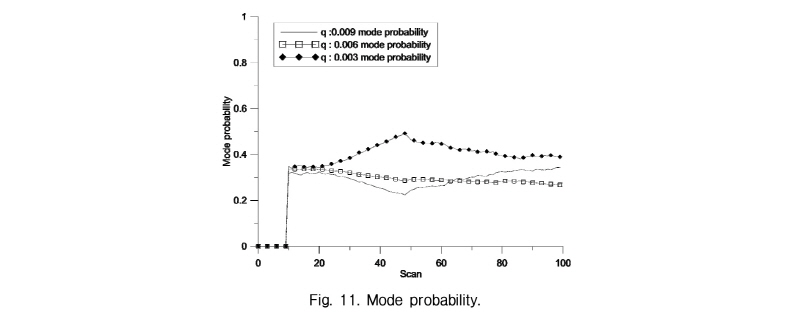
,  )을 사용한 경우는 자함이 기동하지 않는 구간에서는 성능이 좋지 않지만, 자함이 기동한 이후로는 성능의 감소가 작은 편이다. 공정잡음이 서로 다르게 설정한 IMM-IPDA의 경우 전체적으로 하나의 공정잡음을 사용한 IPDA보다 성능이 좋게 나온 것을 확인 할 수 있다. Fig. 11에서는 세 개의 공정잡음에 대한 모드 확률을 그래프로 나타낸 것이다. 앞의 결과와 유사하게 자함이 기동한 시점을 기준으로 볼 때 상대적으로 큰 공정잡음에 대한 모드 확률은 시간이 지남에 증가하고, 상대적으로 작은 공정잡음에 대한 모드 확률은 시간이 감소하고 있다.
)을 사용한 경우는 자함이 기동하지 않는 구간에서는 성능이 좋지 않지만, 자함이 기동한 이후로는 성능의 감소가 작은 편이다. 공정잡음이 서로 다르게 설정한 IMM-IPDA의 경우 전체적으로 하나의 공정잡음을 사용한 IPDA보다 성능이 좋게 나온 것을 확인 할 수 있다. Fig. 11에서는 세 개의 공정잡음에 대한 모드 확률을 그래프로 나타낸 것이다. 앞의 결과와 유사하게 자함이 기동한 시점을 기준으로 볼 때 상대적으로 큰 공정잡음에 대한 모드 확률은 시간이 지남에 증가하고, 상대적으로 작은 공정잡음에 대한 모드 확률은 시간이 감소하고 있다.