

I. 서 론
II. 능동 소음 제어 알고리듬
III. 식기 세척기 소음 환경 분석
IV. 능동 소음 제어 시스템 구성
V. 전산해석을 통한 제어 성능 예측
VI. 제어 성능 시험
VII. 결 론
I. 서 론
최근 삶의 질 향상과 기술이 발전함에 따라 소비자들의 가전제품에 대한 요구 사항이 까다로워지고 있다. 모터에 의해 가동되는 가전제품이 작동하면서 내는 소음은 주거 환경에서 발생하는 주된 소음의 원인으로 볼 수 있다. 이러한 소음은 인간에게 스트레스를 주고 휴식을 방해한다. 따라서 최근에는 가전제품의 기능적 성능뿐만 아니라 소음이나 진동을 고려하는 연구가 요구되고 있다.[1,2] 이러한 요구사항을 만족시키기 위해 가전제품 중에서 오랫동안 주거 환경에서 자리 잡아온 세탁기나 냉장고 같은 경우에는 제품의 소음 저감에 대한 연구가 지속적으로 이루어 져왔다.[3,4,5,6,7,8,9]
반면에 최근 빌트인 가전제품 시장의 규모가 커짐에 따라 사용량이 증가한 가정용 식기세척기의 경우에는 소음 저감에 관한 연구가 아직 미흡한 실정이다. 가정용 식기세척기의 소음에는 펌프 회전에 의한 소음과 노즐에서 물이 분사되면서 내부 구조물에 부딪히는 소음이 있다. 이러한 소음을 저감하기 위한 방법으로 흡, 차음재를 이용하는 수동적 소음제어를 이용해 왔다. 하지만 흡, 차음재를 이용하는 방법은 500 Hz 미만의 저주파 영역의 소음에 대해서는 소음 저감 효과가 비교적 적은 편이다. 한편 최근 Digital Signal Processor(DSP) 장비의 발달로 실시간으로 신호를 처리해 소음을 제어하는 능동 소음 제어에 대한 연구가 많은 분야에서 활발히 이루어지고 있다.[10,11,12] 능동 소음 제어는 수동 소음 제어와 달리 저주파 소음 저감에 효과가 있고 제품의 내부 구조에 대한 제약이 적은 장점이 있다. 식기세척기에서도 능동 소음 제어에 관한 연구[13]가 진행 되었지만 컴퓨터 시뮬레이션으로 제어 성능을 확인하고 실제 시험을 통해 제어 성능을 검증한 연구는 아직 진행되지 않았다.
본 논문에서는 가정용 식기세척기에 발생하는 소음을 능동 제어하여 소음을 저감시키는데 목적을 두고 있다. 능동 소음 제어를 하기 위하여 먼저 식기세척기 소음 환경 분석을 수행하였다. 소음 환경 분석을 통해 제어 대상 소음을 선정하였다. 해당 소음을 제어하는데 가장 적절한 참조 신호와 스피커 위치를 선정하여 제어 시스템을 구성한다. 그리고 Filtered-x Least Mean Square(FxLMS) 알고리듬 기법을 이용하여 제어기를 설계하고 전산해석으로 소음 저감을 예측하였다. 설계한 제어기를 DSP 장비에 탑재하여 제어 성능 시험을 진행하여 제어 전후 소음 수준을 비교하였다.
II. 능동 소음 제어 알고리듬
본 연구에서는 능동소음제어기 설계를 위해 두 가지 알고리듬을 사용하였다. 첫째는 능동 제어기 운용에서 요구되는 2차 경로(제어 스피커에서 측정점까지의 경로)의 모델링을 위해 LMS 알고리듬[14]을 사용하였다. 그리고 둘째는 2차경로가 존재하는 모델의 능동제어기 운용을 위해 FxLMS 알고리듬[15]을 사용하였다.
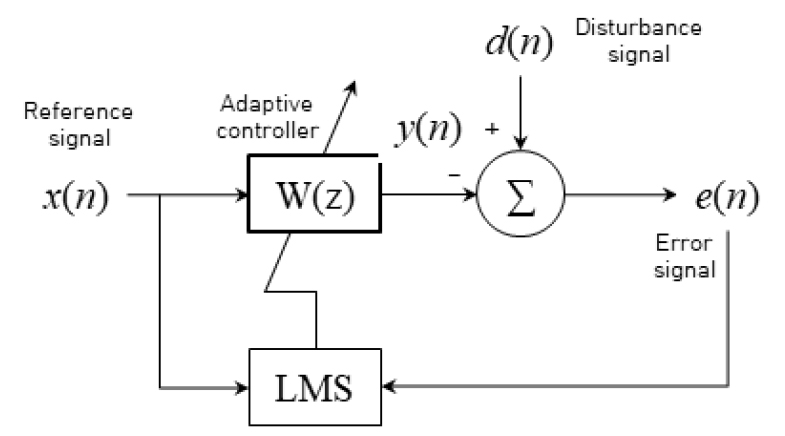
LMS 알고리듬의 블록선도를 Fig. 1에 나타내었다. Fig. 1에서 보는 바와 같이 참조 신호 x(n)이 필터 차수가 I차의 제어기인 W를 통과한 후의 신호 y(n)과 외란신호 d(n) 사이의 오차 신호 파워를 최소화시키는 제어기를 설계하는 기법 이다. 오차신호 e(n)은 다음의 Eq. (1)과 같이 나타낼 수 있다.
여기서
여기서 I는 필터 차수를 뜻한다. 이 때 Eq. (1)을 이용하여, 오차 신호의 파워를 나타내면 다음과 같다.
여기서 J는 목적함수를 뜻한다. Eq. (4)의 목적함수를 최소화하는 필터 계수를 구하기 위해, 경사 하강 법을 이용하였으며, 다음과 같이 표현할 수 있다.
여기서 μ는 수렴계수이다. 수렴 계수가 커짐에 따라 필터의 수렴 속도가 빨라지는 반면 수렴 계수가 너무 크면 필터는 발산하게 된다. 그러므로 적절한 수렴 계수의 선택이 중요하다. 수렴 계수의 범위는 다음과 같이 표현 될 수 있다.
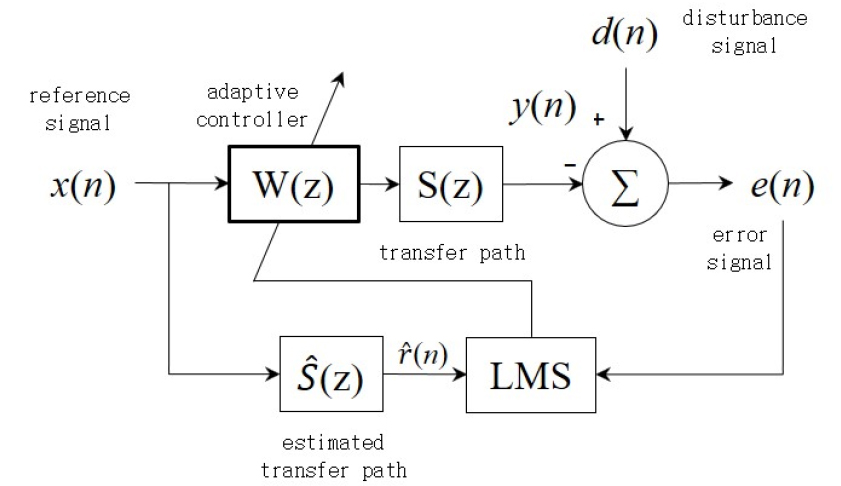
FxLMS 알고리듬의 블록 선도를 Fig. 2에 나타 내었다. FxLMS 알고리듬은 LMS 알고리듬에서 참조신호가 전달경로를 통과한 신호가 입력으로 들어가게 된다. 은 실제 전달 경로 를 2.1절에서 설명한 LMS 알고리듬 방식을 통해 Finite Impulse Response(FIR) 필터 형식으로 추정한 전달 경로를 의미한다. 여기서 오차 신호 은 다음과 같이 나타낼 수 있다.
이 때 Eq. (7)을 이용하여, 오차 신호의 파워를 나타내면 다음과 같다.
Eq. (8)의 목적함수를 최소화하는 필터 계수를 구하기 위해, 경사 하강 법을 이용하였으며, 다음과 같이 표현할 수 있다.
또한 수렴 계수의 범위는 다음과 같이 표현 될 수 있다.
여기서 은 전달 경로의 충격응답에 의해 생겨진 벡터의 놈을 의미하고, 은 참조 신호의 파워를 의미하고 는 전달 경로의 시간 지연 요소를 의미한다.
III. 식기 세척기 소음 환경 분석
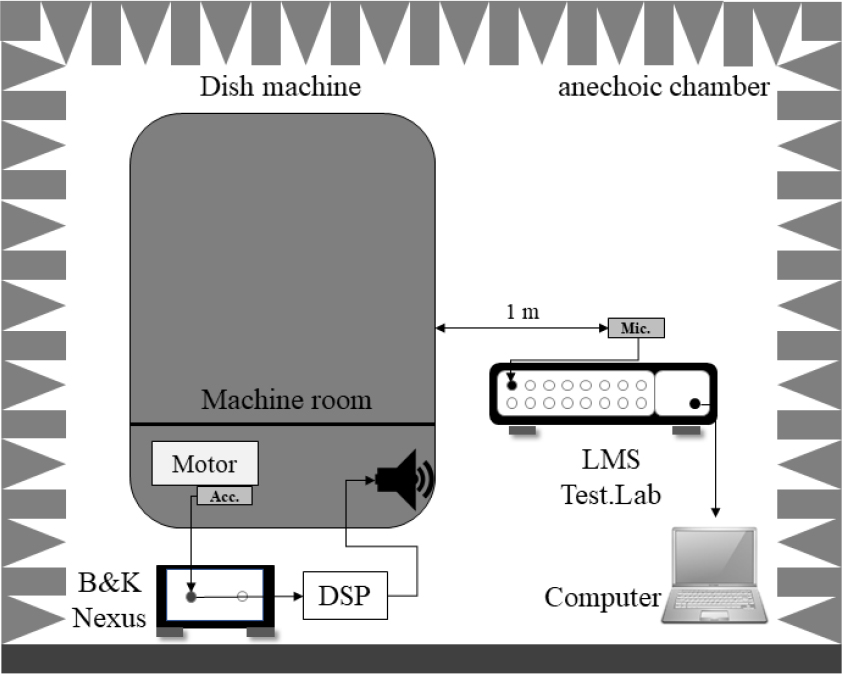
능동 소음 제어를 하기 앞서 식기 세척기의 소음환경 분석을 실시하였다. Fig. 3은 식기 세척기 능동 소음 제어를 하기 위한 장치구성도를 나타낸다. 시험 대상은 가정용 식기 세척기로 상단부에는 물이 분사되면서 식기가 세척되는 공간이 있고, 하단부에는 펌프를 가동하기 위한 기계실이 구성되어 있다. 시험은 반 무향실에서 진행하였으며, 소음을 측정하기 위한 마이크로폰(B&K Type 4190)의 위치는 식기 세척기 전방 1 m, 높이는 식기 세척기 높이 절반인 0.5 m에 두었다. 그리고 신호를 계측 하는 장비로 LMS. Test lab을 사용하였다.
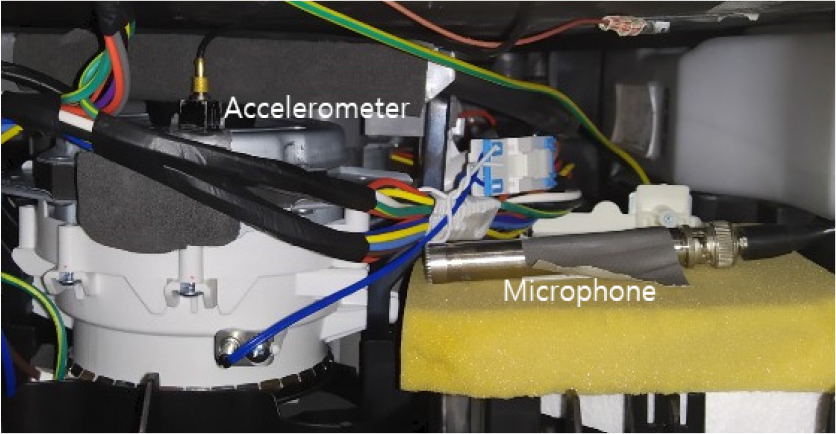
소음 신호와 상관성 높은 참조 신호를 찾기 위해, 주 소음원으로 추정되는 펌프에 가속도계(B&K type 4501)를 부착하였고 펌프 근처에 마이크로폰(B&K type 4190)을 설치하였다. 가속도계 부착 위치와 마이크로폰 위치를 Fig. 4에 나타내었다. 펌프에 직접 부착한 가속도계는 펌프회전과 관련된 진동 신호를 얻을 수 있고 펌프 근처 마이크로폰은 펌프 회전과 관련된 음압 신호를 얻을 수 있다. 선택한 참조신호가 소음원과 얼마나 상관성이 있는지를 평가하기 위하여 참조 신호와 오차 신호사이의 상호 상관 함수를 계산 하였다. 상호 상관 함수는 제어 성능과 직결되는 지표이다[16].
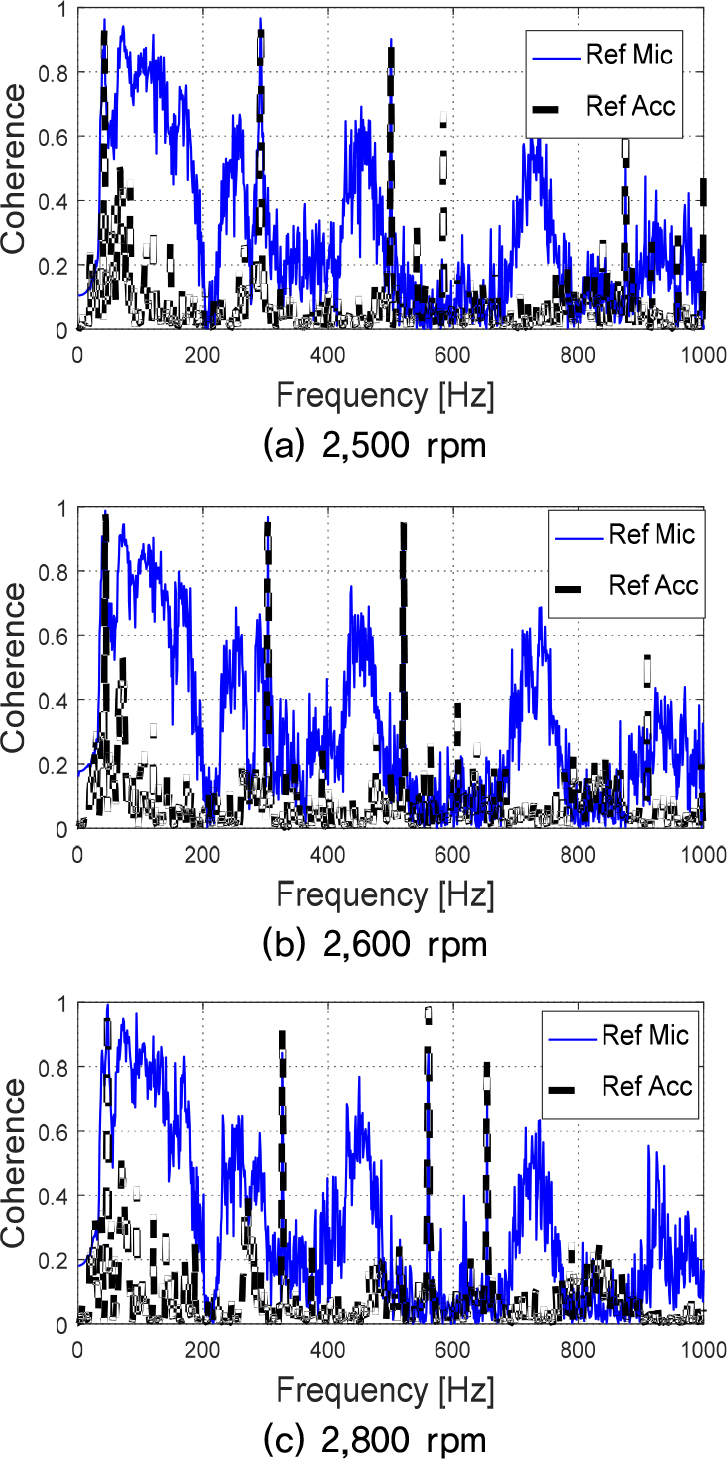
식기세척기를 구동시키는 펌프의 회전수를 2,500 rpm, 2,600 rpm, 2,800 rpm으로 바꿔가면서 소음을 측정하였다. 샘플링 주파수는 2,048 Hz로 하였으며, 이 때 주파수 간격은 1 Hz로 하였다. 그리고 90 % 중첩하여 100회 평균하였다. Fig. 5는 펌프 rpm회전수에 따른 상호 상관 함수를 나타낸 것이다. Fig. 5를 보면 참조 신호 센서가 가속도계 일 때 전방 1 m 소음과 펌프 가속도 사이의 상호 상관 함수 값이 높게 계산 되었다. 반면 참조 신호 센서가 마이크로폰 일 때는 7차, 12차 성분에서 뿐만 아니라 200 Hz 대역에서 높은 상호 상관 함수 값을 가지고 400 Hz ~ 500 Hz 대역과 700 Hz ~ 800 Hz 대역에서 0.5 이상의 상호 상관 함수 값을 가진다. 상호 상관 함수 값을 고려했을 때는 참조 신호 센서가 마이크로폰 일 때 제어 성능이 더 잘나올 것이라고 예상 할 수 있다. 하지만 마이크로폰으로 제어를 하게 되면 식기 세척기의 소음뿐만 아니라 제어 스피커에서 나오는 소음도 측정되기 때문에 제어 전압이 발산하는 음향 피드백 현상이 발생하여 제어 시스템을 구현하기에 어려움이 많다. 따라서 제어 스피커에서 나오는 소음의 영향을 받지 않는 가속도계 신호를 참조 신호로 선정하였다.
IV. 능동 소음 제어 시스템 구성
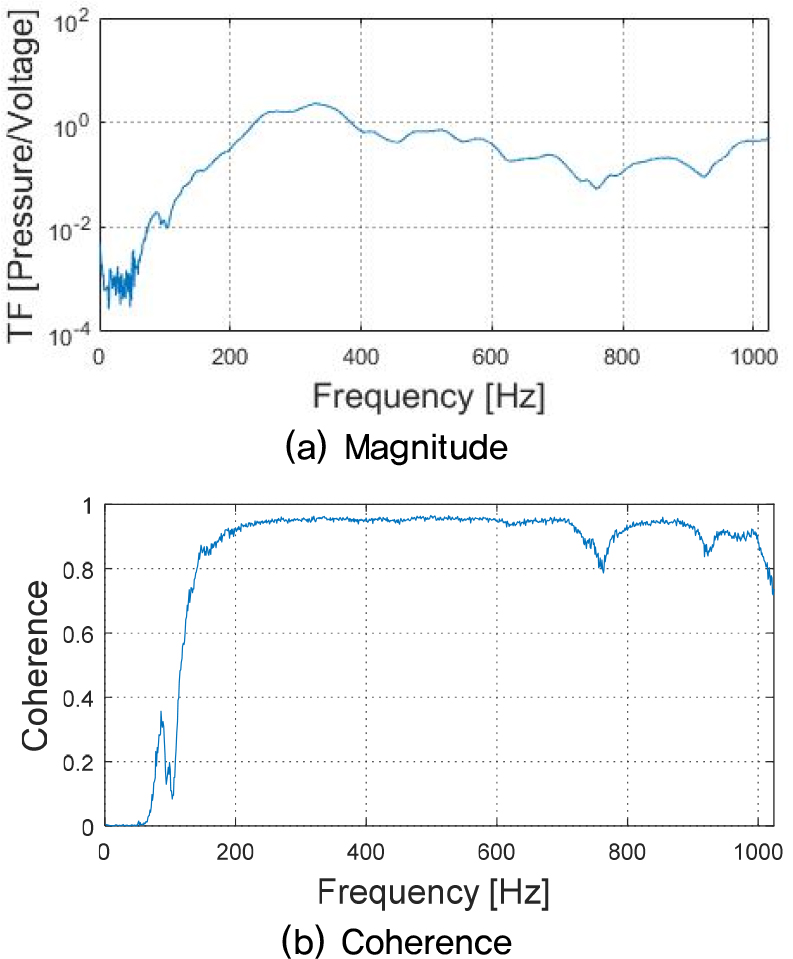
장치 구성도를 나타낸 Fig. 3을 보면 오차 신호 센서인 마이크로폰은 식기 세척기의 전방 1 m, 높이 0.5 m 지점에 위치시켜 음압을 계측하였다. 참조 신호 센서인 가속도계는 주된 소음원이라 추정되는 펌프의 진동을 측정하기 위해 펌프의 외부에 부착하였다. 가속도 계에서 측정된 신호는 B&K 사의 Nexus 장비를 거쳐 전압 신호로 바뀐다. 그리고 이 전압 신호는 DSP 장비를 거쳐 스피커에 전달된다. 액츄에이터인 스피커는 펌프 회전 소음이 오차 신호 센서로 전달되는 중간에 위치시켰다. 스피커의 전달함수를 측정하기 위하여 스피커에 1V 백색잡음 전압을 인가하고 외란신호를 측정하였다. 그리고 전압 대비 음압의 전달함수와 상호 상관 함수를 Fig. 6에 나타내었다. 전달함수와 상호 상관 함수에 근거 하여 스피커가 본 연구에서의 관심 주파수인 펌프 작동 주파수의 7차,12차 배수 성분 주파수에서 제어 신호를 발생 시키는데 적절한 사양을 가지고 있다고 판단 할 수 있다.
V. 전산해석을 통한 제어 성능 예측
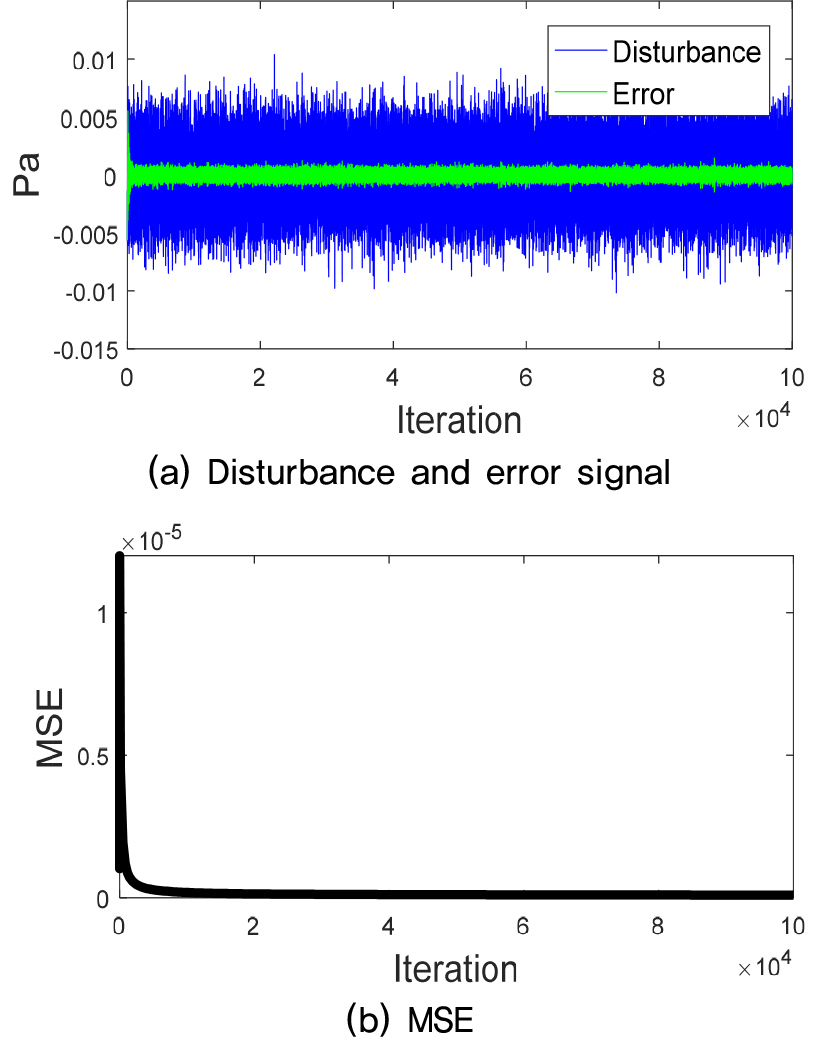
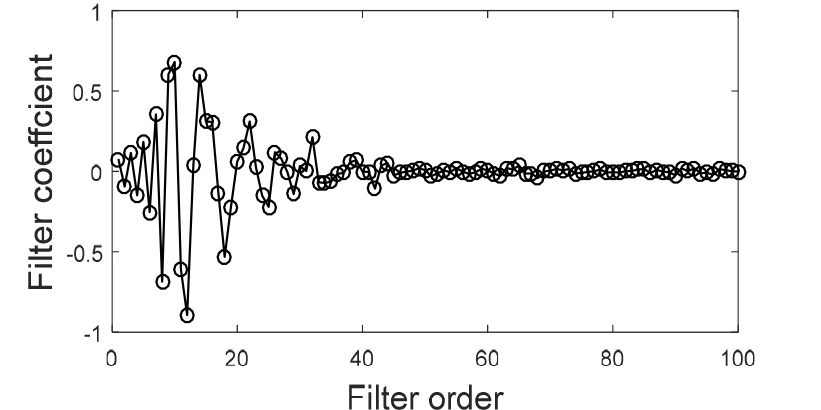
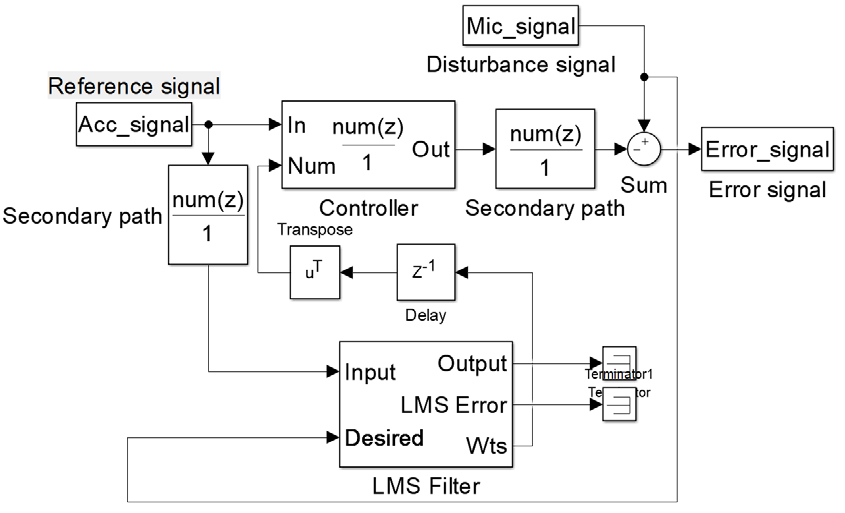
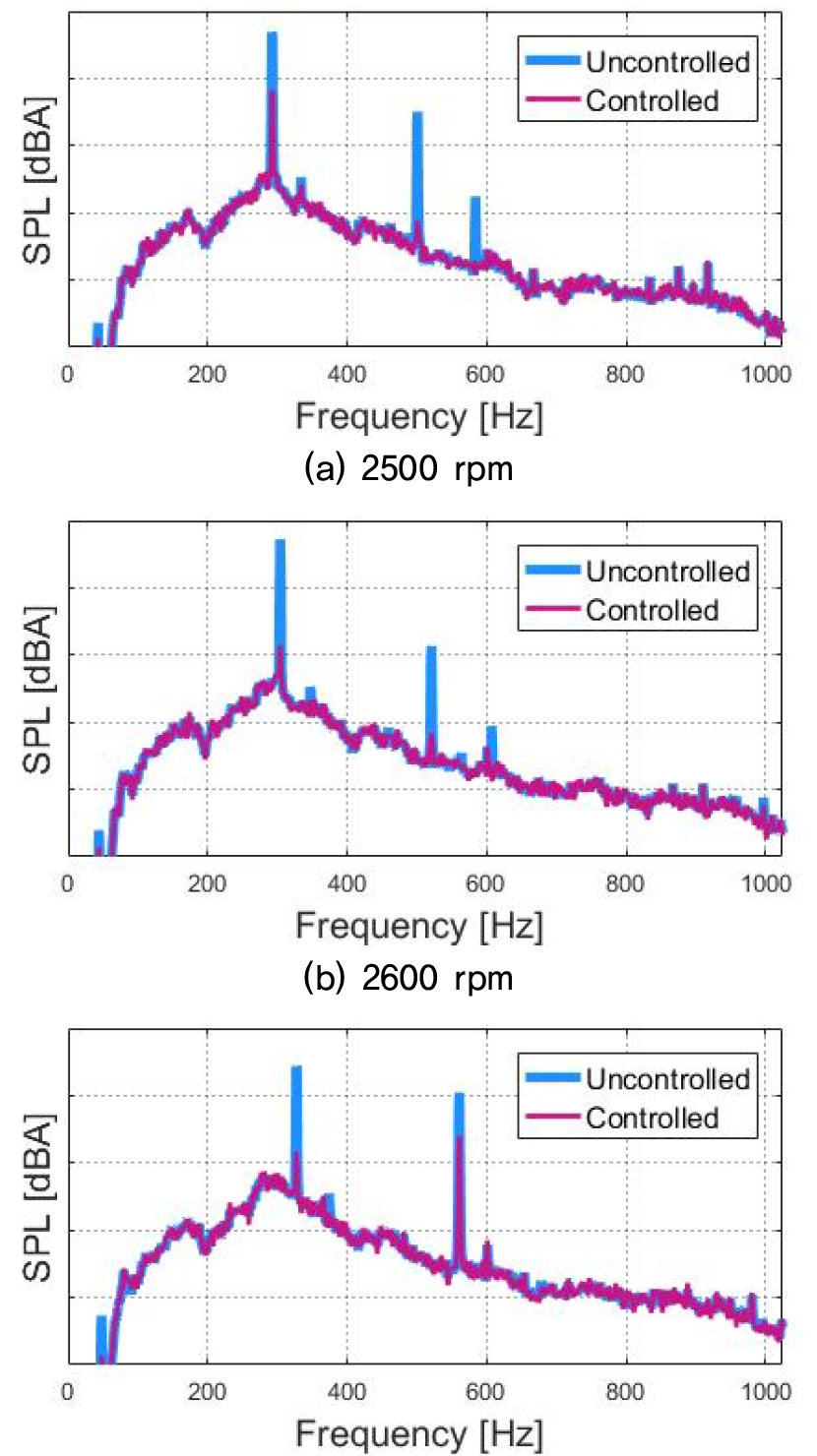
제어 성능 시험을 수행하기 앞서 Mathwork사의 Simulink를 이용하여 제어 시뮬레이션을 수행하였다.이 모델을 구축하기 위해 먼저 스피커에 가해지는 백색 잡음 전압을 입력 신호로 하고 전방 1 m에서 측정되는 음압을 오차 신호로 하여 LMS 알고리듬을 적용하여 스피커 전달 경로를 구하였다. Fig. 7는 LMS 알고리듬을 적용 시킨 결과를 나타낸다. Fig. 7(a)를 보면 필터를 통과함에 따라 오차 신호가 0에 가까이 수렴하는 것을 확인 할 수 있고, Fig. 7(b)를 보면 필터를 통과함에 따라 평균 제곱 오차가 0에 수렴하는 것을 확인 할 수 있다. 그리고 Fig. 8을 보면 필터 차수가 40차 이상이 되면 필터 계수 값이 거의 일정한 값이 나옴을 확인 할 수 있다. 그리고 회전수 별로 측정한 가속도계 신호를 참조 신호 x라하고 구한 스피커 전달경로를 통과시켜 FxLMS 알고리듬을 적용하였다. Fig. 9은 식기세척기 능동제어 Simulink 모델을 보이고 있다. LMS의 입력으로는 가속도 신호가 앞서 구한 스피커 전달 경로를 통과한 신호가 들어가게 되고 Desired에는 마이크로폰 신호가 들어가게 된다. 그리고 Wts으로 FIR 필터 계수가 계산되어 제어기에 들어가게 된다. 마이크 신호에서 가속도 신호가 제어기와 전달경로를 거친 신호를 빼서 오차 신호를 계산한다. 여기서 계산된 오차 신호가 제어 후의 음압이 된다. Fig. 10은 회전수에 따른 제어 전후 음압 스펙트럼을 나타 낸 것이다. 앞서 계산한 상호 상관 함수의 값이 높은 주파수에서 제어 성능을 확인 할 수 있다. 제어 전후 펌프 작동주파수의 7차,12차 배수 성분의 SPL값과 overall Sound Pressure Level(SPL) 값을 Table 1에 나타내었다. 펌프 작동주파수의 7차 배수 성분에서는 회전수 별로 8.69 dB, 15.78 dB, 12.71 dB 만큼 줄었고 12차 배수 성분에서는 회전수 별로 16.20 dB, 13.02 dB, 6.48dB 만큼 줄었다. 그리고 overall SPL은 회전수 별로 4.01 dB, 3.84 dB, 2.57 dB 만큼 줄었다.
VI. 제어 성능 시험
제어 시뮬레이션에서 제어 성능을 확인 한 제어기를 DSP 장비에 탑재하여 제어 성능 시험을 수행 하였다. 제어 전후 시험 결과를 비교하기 위하여 설계한 제어기를 끈 상태에서 20 s를 측정하고 연달아 제어기를 켠 상태에서 20 s를 측정하였다. Fig. 11은 FxLMS 알고리듬을 이용하여 구한 제어기를 이용한 식기 세척기의 소음 저감 시험을 수행한 결과를 나타낸 것이다. 시험 결과는 제어 전 후 전방 1 m에서 측정 되는 음압을 비교하여 회전수 별로 나타내었다. 그리고 제어 시험을 4회 수행하여 제어 전후 펌프 작동주파수의 7차, 12차 배수 성분의 SPL값과 overall SPL 값을 Table 2에 나타내었다. Table 2에서 시험 4회에 대한 평균값을 보면 펌프 작동주파수의 7차 배수 성분에서는 회전수 별로 1.93 dB, 4.44 dB, 5.15 dB 만큼 줄었고 12차 배수 성분에서는 회전수 별로 6.67 dB, 2.34 dB, 4.27 dB 만큼 줄었다. 그리고 overall SPL은 회전수 별로 0.80 dB, 2.58 dB, 1.48 dB 만큼 줄었다.
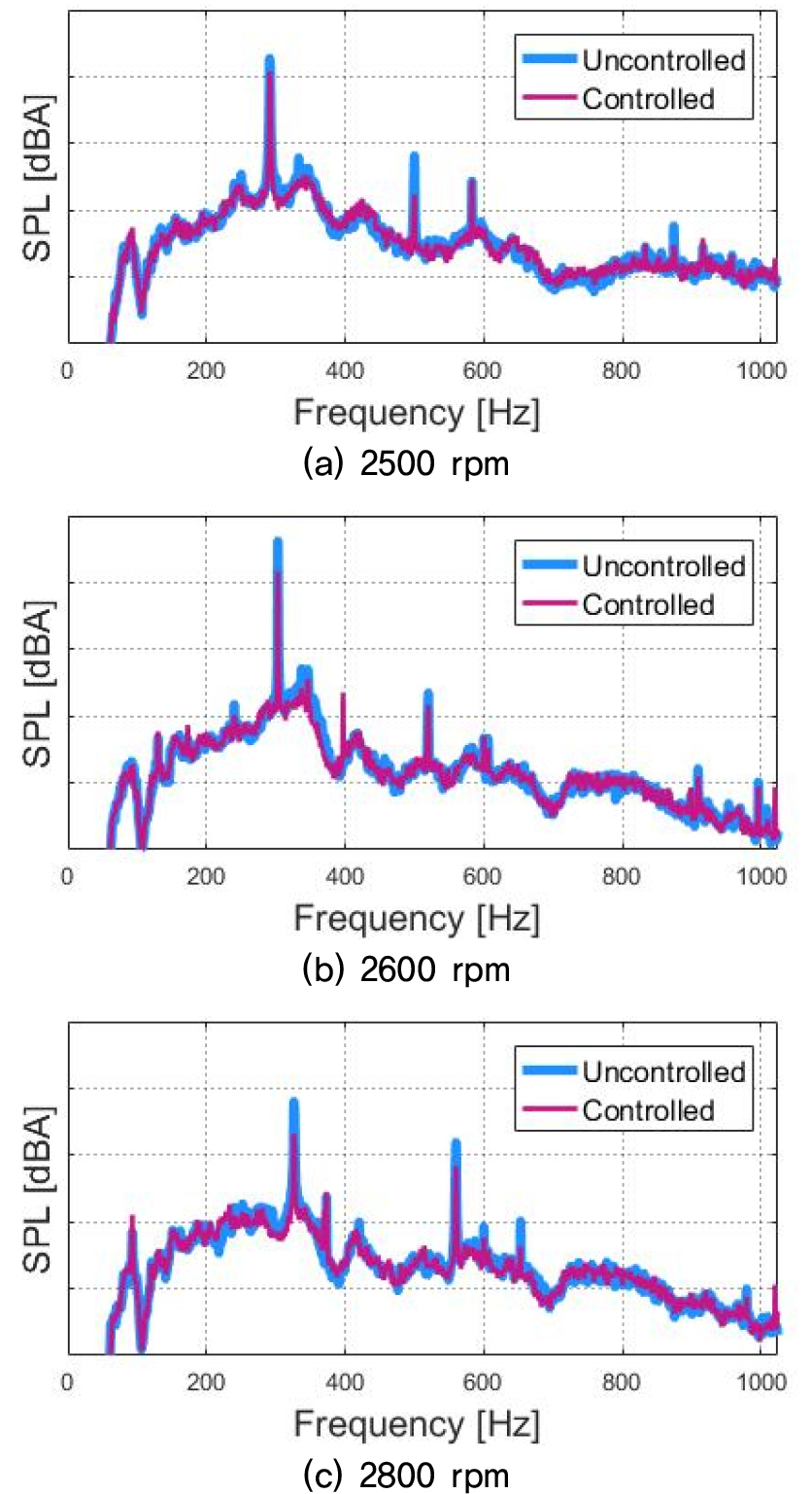
Table 2.
Control performance of the active noise control system denoted by the reduction in SPL at 7th and 12th harmonics of rpm and in overall SPL.
시뮬레이션 결과와 제어 성능 시험 결과가 다소 차이를 보이는데 이는 스피커가 이상적인 스피커가 아니기 때문에 너무 낮은 전압이나 높은 전압이 인가되었을 때 스피커 출력이 앞에서 구한 스피커 전달함수의 비만큼 출력되지 않는다. 따라서 제어 전압이 스피커에 가해졌을 때 시뮬레이션에서 스피커가 내는 출력과 시험에서 스피커가 내는 출력이 다르기 때문이다.
VII. 결 론
본 연구는 FxLMS 알고리듬을 이용하여 식기세척기의 펌프에서 발생하는 소음을 능동제어 하였다. 능동 소음 제어를 구현하기 위하여 먼저 LMS 알고리듬을 적용하여 스피커 전달 경로를 추정하였다. 그리고 오차 센서는 식기 세척기 전방 1 m 마이크로폰으로 하였고, 참조 신호로는 주 소음원으로 추정 되는 펌프에 부착한 가속도계로 선정하였다. 그리고 FxLMS를 적용하여 오차 신호를 최소화 하는 제어기 필터 계수를 구하였다. 최종적으로 구한 제어기 필터 계수를 DSP 장비에 탑재하여 능동 소음 제어를 구현하여 제어 성능을 확인하였다. 본 연구를 통하여 다음과 같은 결론을 얻을 수 있었다.
(1) 실제 시스템(본 연구에서는 식기 세척기)에 대해 FxLMS 알고리듬 기반의 능동 소음 제어 기법을 적용하였다. 소음 저감효과를 확인하기 위해 오차 센서의 선정 및 위치 설정, 그리고 오차 신호의 정보를 담고 있는 참조 신호의 선정과 관련된 소음 환경 분석이 요구 되었다. 참조 신호 센서는 펌프에 부착한 가속도계와 펌프 근처 마이크로폰으로 하였다. 가속도계는 펌프 작동주파수의 7, 12차 성분에서 높은 상호 상관 함수 값을 가졌고, 마이크로폰은 펌프 작동주파수의 배수 성분뿐만 아니라 넓은 대역에서 높은 상관 함수 값을 가졌다. 하지만 마이크로폰은 음향 피드백 현상 때문에 제어 시스템을 구현하기 어렵기 때문에 참조 신호 센서로 가속도계를 선정하였다.
(2) 본 연구에서는 식기 세척기의 회전수를 변화 시켜가면서 전산 해석을 통해 제어기를 설계하였고 제어 성능을 예측하였다. 그리고 설계한 제어기를 DSP 장비에 탑재시켜 능동 소음 제어 시험을 4회 수행한 결과 3가지 회전수에 대해서 다음과 같은 소음 저감 효과가 있음을 확인 하였다. 2500 rpm에서는 펌프 작동 주파수의 7차, 12차 주파수에서 각각 평균1.93 dB, 6.67 dB가 감소하는 효과가 있었고 overall SPL에서는 평균 0.84 dB가 감소하는 효과가 있었다. 그리고 2600 rpm에서는 펌프 작동 주파수의 7차, 12차 주파수에서 각각 평균 4.43 dB, 2.34 dB가 감소하는 효과가 있었고 overall SPL에서는 평균 2.58 dB가 감소하는 효과가 있었다. 그리고 2800 rpm에서는 펌프 작동 주파수의 7차, 12차 주파수에서 각각 평균 5.15 dB, 4.28 dB가 감소하는 효과가 있었고 overall SPL에서는 평균 1.48 dB가 감소하는 효과가 있었다.
