

I. 서 론
최근 수중운동체의 정숙화 기술이 발전함에 따라 수동소나(passive sonar)를 이용한 탐지가 어려워지고 이를 해결하기 위해 능동소나(active sonar) 사용 빈도가 높아지고 있다. 능동핑을 이용하여 표적 탐지/추적을 수행하는 능동소나에서는 능동핑에 대한 에코로서 관심표적에 대한 정보 외에 해양지형, 침선, 해양생물체 및 산란과 반향 등에 의한 클러터 정보가 함께 나타나는 특징이 있다. 이러한 고밀도 클러터 환경에서의 표적 추적은 수동소나를 이용한 표적 추적과 달리 클러터 간섭에 의해 데이터 연관(data association)이 안정적이지 못한 단점이 있다. 고밀도 클러터 환경에서의 안정적인 표적 탐지/추적을 위해서 클러터로 판별되는 탐지정보는 제거하고 관심표적으로 판별되는 탐지정보는 유지하여 능동핑에 대한 추적이 지속적이고 안정되게 수행하도록 하는 연구[ 1,2]가 진행되어 왔다. 특히 레이더 분야에서 클러터 제거기능으로서 단일핑 및 누적핑을 이용한 기법이 연구되고 있다. 단일핑 클러터 제거기법으로서 Markov random field를 이용한 segmentation 기법[3] 및 고밀도 클러터 환경에서의 허프변환을 이용한 추적 초기화 연구[4,5]가 대표적이다.
본 논문에서는 클러터 제거 기능을 능동소나 고밀도 수중 클러터 환경에 적용하여 수중환경에서의 클러터 제거 및 관심표적에 대한 탐지/추적 성능 향상을 검증하고자 한다. 본 논문의 2장에서 고밀도 수중 클러터 환경에서 관심표적에 대한 탐지 및 추적의 문제점을 기술하고, 3장에서 이러한 문제점을 해결하기 위한 알고리즘을 제안한다. 4장에서는 모의신호와 해상실험데이터를 이용하여 제안한 알고리즘을 검증하며 5장에서 결론을 기술한다.
II. 고밀도 클러터환경에서의 능동소나 표적추적
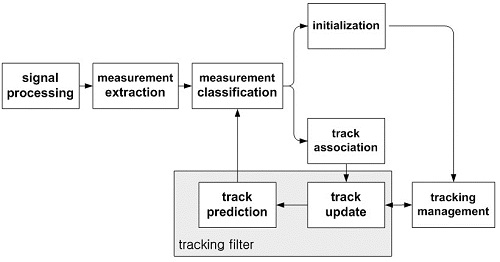
일반적인 능동소나표적 추적 알고리즘은 Fig. 1과 같이 측정치 추출, 측정치 분류, 초기화, 연계, 추적 필터, 표적 관리로 구분된다. 측정치 추출은 입력으로서 탐지데이터를 수신하고 문턱값을 적용하여 추적에 필요한 측정치를 추출한다. 측정치 분류에서 추출된 측정치와 기존 표적과의 근접도를 계산한다. 근접도 내에 있으면 기존 표적과의 연계에 사용할 연계용 측정치로 분류하고 근접도 외에 있으면 새로운 표적 생성을 위한 초기화용 측정치로 분류한다. 초기화용 측정치는 초기화 단계에서 누적 여부를 판별하여 누적 문턱값을 넘을 경우 새로운 표적으로 초기화된다. 연계용 측정치는 기존 표적과 연계하여 갱신 및 예측의 추적 필터링을 수행한다. 표적에 대한 갱신, 삭제는 표적관리에서 수행한다.
위의 일반적인 추적 알고리즘을 적용한 능동소나 표적추적에서는 능동핑 에코 특성으로 인해 클러터가 고밀도로 생성되므로 다음과 같은 문제가 발생한다.
1.고밀도 클러터 환경에서 오탐지 데이터에 대한 추적을 불필요하게 수행한다.
2.클러터의 간섭에 의해 관심표적에 대한 추적이 지속적이지 못하거나, 실제 표적 기동궤적과의 편차가 크게 나타난다.
3.실표적 데이터와 공존하는 다수의 오탐지 데이터는 운용자가 콘솔화면에서 관심표적을 식별하고 관리함에 있어서 어려움을 유발시킨다.
III. 클러터제거 알고리즘
고밀도 클러터 환경에 대한 추적의 문제점을 극복하기 위해 본 논문에서는 지속적이고 안정적인 추적의 기반이 되는 허프변환을 이용한 클러터 제거 알고리즘을 제안된 추적 알고리즘에 적용하였다.
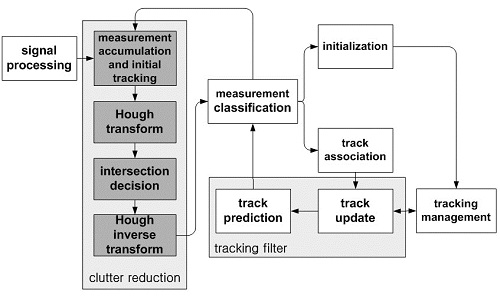
본 논문에서 제안된 추적 알고리즘은 Fig. 2와 같이 측정치 추출에서 클러터 제거기능을 추가하였다.
클러터 제거기능을 수행하기 위해 누적핑 탐지데이터를 허프변환하여 산출되는 특징정보를 이용하는 알고리즘을 제안한다. 누적 핑을 이용한 허프변환은 Hough에 의해 제안된 특징 검출 방법[4,5]을 누적 능동핑 탐지 데이터에 적용한 방법이다. 이는 과거의 여러 핑 탐지 데이터를 누적/관리하고 이들이 허프 파라미터 공간(Hough parameter space)에서 교차하는 지를 판단하여 관심표적 탐지 데이터를 추출한다. 허프변환에서 직교좌표계 2차원 평면에서의 측정치는 허프변환에 의해 거리-각의 2차원 평면에서의 곡선으로 변환된다. 데이터 공간과 허프 파라미터 공간과의 상호 상관관계는 다음과 같다.  와
와  는 데이터 공간에서의 좌표지점을 나타내며,
는 데이터 공간에서의 좌표지점을 나타내며,  와
와  는 허프 파라미터 공간에서의 거리와 각을 나타낸다.
는 허프 파라미터 공간에서의 거리와 각을 나타낸다.
 coordinate and
coordinate and  Hough transform.
Hough transform. .
.허프변환 클러터 제거 알고리즘은 다음과 같다.
1.능동소나 탐지데이터로부터 측정치( )를 추출한다.
)를 추출한다.
 .
.2.측정치( )를 매 핑 누적하여 누적 측정치 그룹(
)를 매 핑 누적하여 누적 측정치 그룹( )을 생성한다.
)을 생성한다.
 .
.3.물리적으로 수중표적으로부터 기인될 가능성이 있는 측정치를 식별하기 위해  ,
,  에 대해 rectangular gating을 이용한 초기추적을 수행하여 초기 추적된 측정치 그룹(
에 대해 rectangular gating을 이용한 초기추적을 수행하여 초기 추적된 측정치 그룹( )을 생성한다.
)을 생성한다.
4.측정치 그룹( )에 대해 허프변환(HT)을 수행하여 허프 파라미터 공간에서의
)에 대해 허프변환(HT)을 수행하여 허프 파라미터 공간에서의  개의
개의  로 구성된
로 구성된  와
와  개의
개의  로 구성된
로 구성된  을 생성한다.
을 생성한다.
 .
.5. 의 유사도를 판단한다.
의 유사도를 판단한다.
 .
.6.유사도를 갖는  에 대해 허프 역변환(inverse HT)을 수행하여 클러터가 제거된 측정치
에 대해 허프 역변환(inverse HT)을 수행하여 클러터가 제거된 측정치  를 추출한다.
를 추출한다.
 .
. 는
는  번째에서 추출된 측정치
번째에서 추출된 측정치  에서 클러터가 제거된 측정치의 개수를 나타낸다.
에서 클러터가 제거된 측정치의 개수를 나타낸다.
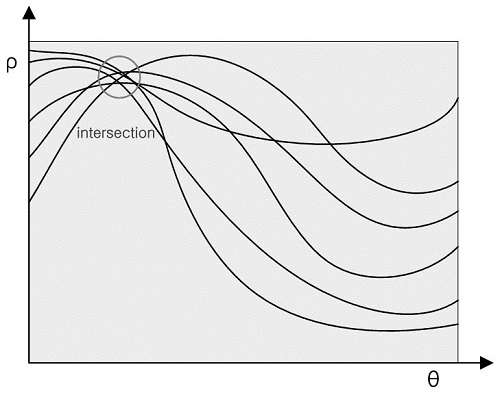
수중표적의 기동 특성에 따라 핑에 대한 누적 횟수 설정과  및
및  설정을 변경할 수 있다. Fig. 4와 같이 허프 파라미터 공간에서의 교차점은 데이터 공간에서의 표적의 이동경로로 역변환된다. 교차점으로 표현되지 않는 데이터 공간에서의 측정치는 클러터로서 식별되어 제거된다. 본 논문에서 제안한 추적 알고리즘에서 허프변환을 반영한 측정치 추출 단계는 Fig. 2의 측정치 추출단계 클리터 제거기능과 같이 탐지데이터 누적, rectangular gating을 통한 초기추적, 허프변환, 허프 파라미터 공간에서의 교차점 판단, 역변환을 통한 새로운 측정치 생성으로 이루어진다.
설정을 변경할 수 있다. Fig. 4와 같이 허프 파라미터 공간에서의 교차점은 데이터 공간에서의 표적의 이동경로로 역변환된다. 교차점으로 표현되지 않는 데이터 공간에서의 측정치는 클러터로서 식별되어 제거된다. 본 논문에서 제안한 추적 알고리즘에서 허프변환을 반영한 측정치 추출 단계는 Fig. 2의 측정치 추출단계 클리터 제거기능과 같이 탐지데이터 누적, rectangular gating을 통한 초기추적, 허프변환, 허프 파라미터 공간에서의 교차점 판단, 역변환을 통한 새로운 측정치 생성으로 이루어진다.
허프변환을 통해 생성된 새로운 측정치는 추적 단계의 필터 입력으로 사용된다. 추적 필터로서 기존에 여러 형태의 필터가 제안되었는데, 본 논문에서는 초기화된 표적의 추적 초기 단계에서 빠른 수렴과 지속적인 추적을 위해 CMKF-L[6]을 적용하였다. 측정치의 좌표계를 극좌표에서 직교좌표계로 변환하면서 측정치의 비선형 특성이 선형 특성으로 전환된다. 이에 기인하여 확장 칼만필터(extended Kalman filter)와 같은 비선형 필터를 사용할 필요가 없게 된다. CMKF-L의 상태 벡터(state vector)  , 측정치 벡터(measurement vector)
, 측정치 벡터(measurement vector)  , 상태 방정식(state equation), 측정치 방정식(measurement equation), 상태천이 행렬(state transition matrix)
, 상태 방정식(state equation), 측정치 방정식(measurement equation), 상태천이 행렬(state transition matrix)  , 측정 행렬(measurement matrix)
, 측정 행렬(measurement matrix)  는 다음과 같으며 표적 초기화는 표적기동에 대한 물리적 특성을 고려한 rectangular gating을 통해 수행하였다.
는 다음과 같으며 표적 초기화는 표적기동에 대한 물리적 특성을 고려한 rectangular gating을 통해 수행하였다.  와
와  는 공정잡음(processing noise)과 측정잡음(measurement noise)를 나타내며,
는 공정잡음(processing noise)과 측정잡음(measurement noise)를 나타내며,  와
와  은 이에 대한 분산을 각각 나타낸다. 오차공분산은
은 이에 대한 분산을 각각 나타낸다. 오차공분산은  로 표시한다.
로 표시한다.
 ,
, ,
, ,
, ,
, ,
, ,
, ,
, .
.일반적으로 측정잡음 분산  행렬은 다음과 같다.
행렬은 다음과 같다.
 ,
, ,
, .
. 과
과  는 직교좌표계 데이터 공간에서의 거리 및 방위를 나타낸다.
는 직교좌표계 데이터 공간에서의 거리 및 방위를 나타낸다.  과
과  로 측정치의 좌표변환에 따른 오차를 표시한다. 초기 오차 공분산
로 측정치의 좌표변환에 따른 오차를 표시한다. 초기 오차 공분산  행렬은 필터 초기화의 일반적인 내용[7]을 참고하였다.
행렬은 필터 초기화의 일반적인 내용[7]을 참고하였다.
CMKF-L을 통해 갱신, 예측된 표적정보는 표적관리에서 M-of-N 형태로 관리되며 표적 궤적 유지 또는 삭제가 이루어진다. 표적관리에서의 표적정보는 다음 프레임의 탐지데이터와 회귀적으로 연관된다.
IV. 실험 및 고찰
본 논문에서 제안한 알고리즘을 검증하기 위해서 모의신호와 해상실험데이터를 이용하였다. 모의신호 생성을 위해 클러터의 확률적 발생빈도는 PD(탐지 확률) 80%, Pfa(오탐지 확률) 0.05%와 탐지구역(surveillance area)을 기반으로 포아송 분포(Poisson distribution)로 계산하였다. 공간적 분포는 위의 확률적 발생빈도와 탐지구역을 기반으로 균등 분포(uniform distribution)로 생성하였다. 신호준위는 클러터 평균 SNR 10 dB의 레일리 분포(Rayleigh distribution)로 계산하였다. 표적은 x-y(100, 100)에서 xv-yv(4 ,2)속도로 20 프레임동안의 이동경로를 보여주며, 표적의 신호는 20 dB로 설정하였다. 이는 가우시안 분포(Gaussian distribution)로서 위치 평균 0, 위치 표준편차 2.0, 신호크기 평균 0, 신호크기 표준편차 0.1로 생성하였다. 실험은 직교 좌표계 기준으로 수행하였고 CMKF-L의 공정 잡음( )은 0.01로 설정하였다.
)은 0.01로 설정하였다.  행렬과
행렬과  행렬 구성을 위해
행렬 구성을 위해  는 0.5,
는 0.5,  는 1,
는 1,  는 1,
는 1,  는 1로 설정하였다.
는 1로 설정하였다.  와
와  는 좌표변환에 따른 속도 오차와 침로 오차를 나타낸다. 실험에서의 측정치는 점으로 나타내었으며, 추적은 원으로 표시하였다.
는 좌표변환에 따른 속도 오차와 침로 오차를 나타낸다. 실험에서의 측정치는 점으로 나타내었으며, 추적은 원으로 표시하였다.
|
Fig. 5. Tracking before clutter reduction (simulation data). |
|
Fig. 6. Tracking after clutter reduction (simulation data). |
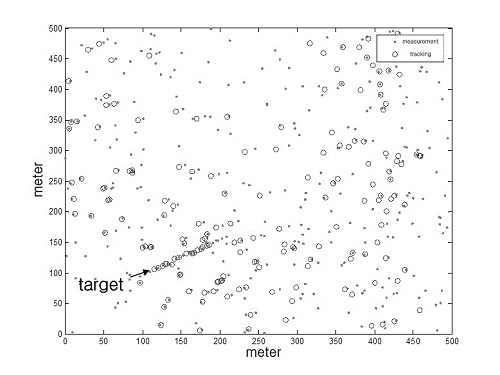
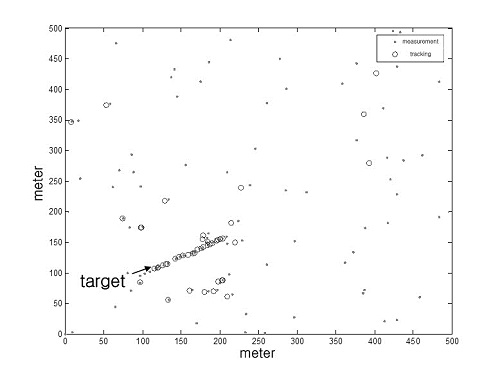
Fig. 5와 Fig. 6은 모의신호를 이용하여 허프변환 클러터 제거기능의 적용전과 적용후의 탐지데이터에 대한 추적성능을 각각 나타내고 있다. 제안된 알고리즘을 적용하기 전의 탐지 데이터에 비해 적용한 후의 탐지 데이터에서 클러터가 상당부분 제거됨을 알 수 있다. 클러터 제거 전의 추적에서 클러터의 간섭으로 관심표적의 추적이 지속적이며 안정적으로 수행되지 않은 점에 비해 클러터 제거 후의 관심표적 추적은 클러터의 간섭 없이 지속적이고 안정되게 진행됨을 알 수 있다. 클러터 제거 전의 경우, 빈번하게 클러터에 대한 불필요한 추적이 수행되었다. 이로 인해 운용자가 화면에서 관심표적을 식별하는데 많은 어려움을 주었다.
|
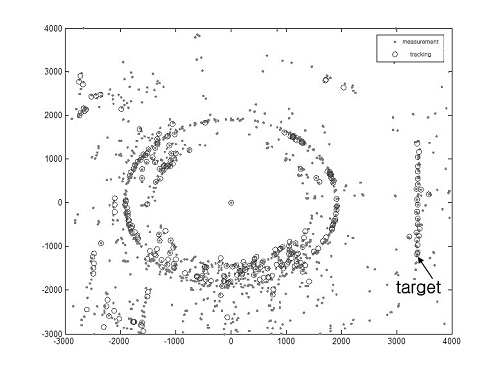
Fig. 7. Tracking before clutter reduction (real sea-trial data). |
|
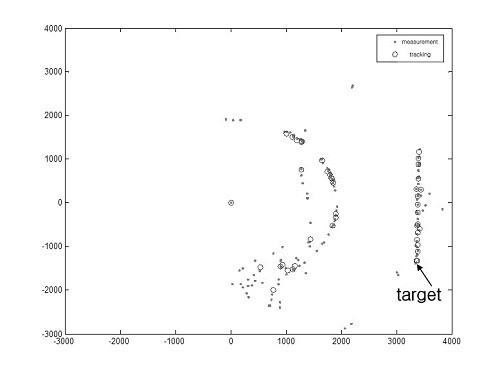
Fig. 8. Tracking after clutter reduction (real sea-trial data). |
반면에 클러터 제거 후의 추적은 소수의 클러터에 대한 추적은 이루어졌지만, 관심표적에 대한 추적이 주요하게 수행되어 운용자 관심표적 식별에 도움을 주었다.
Fig. 7과 Fig. 8은 해상실험 데이터를 이용하여 클러터 제거기능 적용 전과 적용 후의 탐지데이터에 대한 추적성능을 보여준다. 2월에 수심평균 1000 m 이상인 울산동방해역에서 선체고정형음탐기(hull mounted sonar)를 이용하여 FM 펄스를 송/수신해 해상데이터를 획득하였다. 해당 해역의 클러터 탐지 요인은 해저지형과 잔향음인 것으로 판단된다. 허프변환 클러터 제거기능을 적용 한 후의 경우 클러터가 상당부분 제거됨을 알 수 있다. 일부 잔재하는 클러터에 대한 추적도 수행되었지만 관심 표적에 대한 추적이 지속적이며 안정되게 수행됨을 알 수 있다.
|
Fig. 9. Number of target tracking before clutter reduction (simulation data). |
|
Fig. 10. Number of target tracking after clutter reduction (simulation data). |
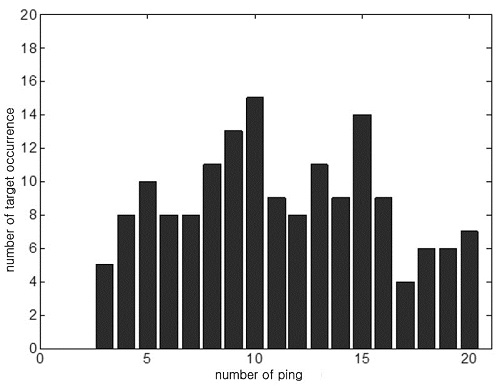
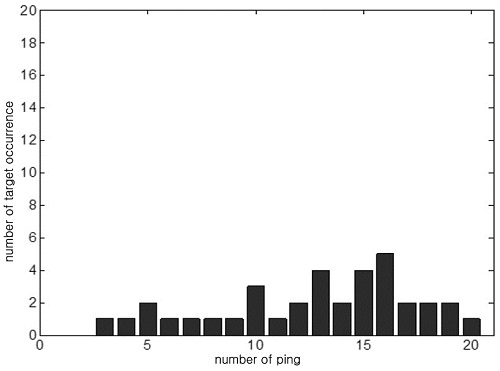
Fig. 9와 Fig. 10은 모의신호를 이용한 소나표적 추적에서 허프변환 클러터 제거기능을 수행하기 전과 후의 추적표적의 수를 실험 수행시간(핑 수)에 따라 나타낸다. Fig. 11과 Fig. 12는 해상실험데이터를 이용한 경우의 결과를 나타낸다. 클러터 제거기능을 적용하기 전의 추적에서는 클러터에 대한 추적이 다수 수행되어 제안된 알고리즘을 적용한 후의 추적과 비교하여 클러터에 대한 추적표적의 수가 상대적으로 많음을 알 수 있다.
|
Fig. 11. Number of target tracking before clutter reduction (real sea-trial data). |
|
Fig. 12. Number of target tracking after clutter reduction (real sea-trial data). |
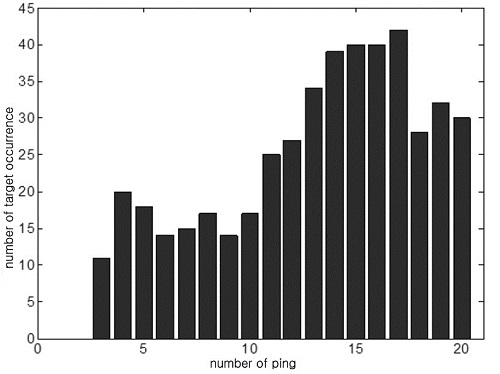
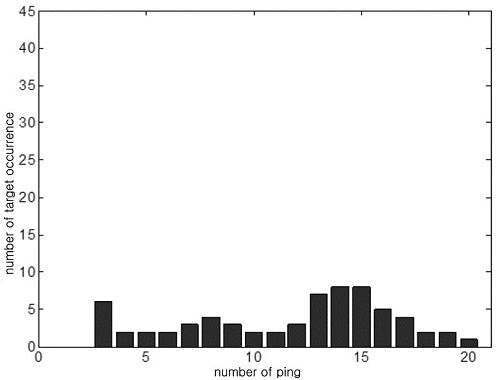
탐지시간(핑 별)에 따라 클러터 제거 전과 제거 후의 추적표적 수를 비교하여 허위표적 제거율을 계산하였다. 허위표적 제거율은 모의신호의 경우 전체 20핑 대비 평균 78%이고, 해상실험데이터의 경우 평균 84%이다.
V. 결 론
본 논문에서는 고밀도 클러터 환경에서 표적에 대한 추적 성능의 열화 및 오탐지 데이터에 대한 추적을 방지하고자 허프변환 클러터 제거 기능을 이용하여 측정치 추출 및 추적을 수행하였다. 기존 고밀도 클러터 환경에서의 추적과 대비하여 허프변환 클러터 제거기능을 통한 추적은 관심표적에 대한 추적이 지속적이고 안정되게 수행되었고, 클러터와 같은 오탐지 데이터에 대한 추적이 방지되었다.
제안된 알고리즘은 능동핑을 통한 수중운동체 탐지 및 추적에서 고밀도 클러터 환경을 배제하는데 유용하게 활용될 수 있을 것이다. 허프변환 클러터 제거기능은 탐지데이터의 누적을 필요로 한다. 향후 누적 핑 수를 줄이는 보완이 필요하다.
