I. 서 론
II. 정합장 처리의 오정합 문제
2.1 수심 불일치
2.2 수신배열 센서의 기울기 불일치
III. 머신러닝 기반 정합장 처리
3.1 입력 데이터 전처리
3.2 음원 거리 매핑
3.3 순방향 신경망 모델
IV. SAVEX15 실험
4.1 해상 실험 환경
4.2 데이터 분석 결과
V. 수치 시뮬레이션
5.1 수심 불일치
5.2 수신배열 센서의 기울기 불일치
5.3 수심 및 배열 센서의 기울기 불일치
VI. 결 론
부록(Appendix)
I. 서 론
정합장 처리(Matched Field Processing, MFP)[1,2,3,4,5,6]는 Bucker[7]가 1976년 제안한 기법으로, 수신배열 센서를 이용하여 수중 음원의 위치(거리 및 심도)를 추정하는 방법이다. 이 기법은 파동 방정식을 이용한 음향 모델을 기반으로 하며, 현재까지도 활발한 연구가 진행되고 있다. 정합장 처리는 해양 환경 정보(음속 구조, 지음향 인자, 수심 등)와 수신배열 센서의 형상(배열 기울기 등)을 입력 변수로 사용하여 복제 음장을 생성한 뒤, 이를 배열 센서에 수신되는 실제 데이터와 비교하여 음원의 위치를 추정한다. 그러나 실제 환경에서는 해양 환경 및 배열 기울기에 대한 정확한 정보를 확보하기 어려우며, 이러한 불확실성으로 인해 정합장 처리의 성능이 저하될 수 있다. 특히, 입력 변수의 불일치로 인해 생성된 복제 음장과 실제 측정 신호 간의 상관성이 낮아지는 현상을 모델 오정합 문제[1]라고 한다. 예를 들어, 해양에서 측정된 실제 데이터의 수심과 음향 모델에서 사용된 수심이 불일치할 경우, 신기루 현상[8]이 발생하여 음원의 위치를 실제 위치와 다르게 추정할 수 있다. 또한, 수신배열 센서의 기울기 불일치는 상대적으로 더 큰 위치 추정 오류를 유발하는 것으로 보고된 바 있다.[8] 이러한 문제를 해결하기 위해 다양한 적응형 정합장 처리(Adaptive MFP) 기법[9,10,11]이 연구되고 있다.
최근 모델 오정합 문제를 극복하기 위한 새로운 접근 방식으로 머신러닝 기반 정합장 처리(ML-based MFP)가 제안되었다. 2017년 Niu et al.[12,13]은 머신러닝 기법을 활용하여 음향 모델을 사용하지 않고 수중 음원의 거리를 추정하는 방법을 연구하였다.[12,13] 기존에 활용되던 음향 모델 기반 정합장 처리(Model-based MFP)와 달리, 머신러닝 기반 정합장 처리는 훈련 데이터를 학습한 뒤 새로운 테스트 데이터의 음원 거리를 예측하는 방식으로 동작하므로 해양 환경 정보 및 배열 기울기 정보가 필요하지 않다는 장점이 있다.
Niu의 연구에서는 순방향 신경망(Feedforward Neural Network, FNN), 서포트 벡터 머신(Support Vector Machine, SVM), 랜덤 포레스트(Random Forest, RF) 등의 머신러닝 알고리즘을 활용하였으며, 음원의 거리 추정을 분류 문제로 간주하여 분석하였다. 연구 결과, 머신러닝 기반 정합장 처리는 음향 모델 기반 정합장 처리보다 성능이 우수한 것으로 나타났다. 특히, 훈련 데이터와 테스트 데이터가 유사한 환경에서 수집된 경우, 해양 환경 정보와 배열 기울기 정보를 요구하지 않으므로 모델 오정합 문제에 강인한 결과를 보였다. 그러나 훈련 데이터와 테스트 데이터 간의 해양 환경 변수 또는 배열 기울기의 차이가 날 경우, 기존 음향 모델 기반 정합장 처리와 마찬가지로 오정합 문제가 발생할 가능성이 있다. 하지만 이에 대한 분석 결과가 제시되지 않았으므로, 머신러닝 기반 정합장 처리 역시 오정합 문제에 대한 성능 분석이 필요하다.
본 논문에서는 기존 음향 모델 기반 정합장 처리 및 머신러닝 기반 정합장 처리를 활용한 수중 음원 거리 추정 성능을 분석하고, 오정합 문제가 발생할 경우 거리 추정 오차 및 그 원인을 실험 데이터와 수치 시뮬레이션을 통해 연구하였다. 특히, 수심 불일치가 존재할 경우, 두 기법 모두 신기루 현상이 발생하여 실제 음원의 거리와 다른 값을 추정하는 경향을 보였다. 또한, 수신배열 센서의 기울기 불일치는 그 불일치 정도에 따라 거리 추정 오차율이 달라지는 원인이 되었다. 나아가, 수심과 배열 기울기 불일치가 동시에 존재할 경우, 신기루 현상과 배열 기울기 변화에 따른 거리 추정 오차가 결합되어 오차가 더욱 커지는 경향을 보였다.
본 논문의 구성은 다음과 같다. II장에서는 정합장 처리의 수심 및 수신배열 센서 기울기 불일치에 따른 오정합 문제를 수식적으로 설명한다. III장에서는 머신러닝 기반 정합장 처리 기법을 설명한다. IV장에서는 SAVEX15 환경과 실험 데이터를 활용한 음향 모델 기반 정합장 처리와 머신러닝 기반 정합장 처리의 수중 음원 거리 추정 결과를 논의한다. V장에서는 수치 시뮬레이션을 통해 실험 데이터 결과를 분석하고, 오정합으로 인한 거리 추정 오류의 원인을 제시한다. VI장에서는 최종적으로 결론을 도출한다.
II. 정합장 처리의 오정합 문제
본 장에서는 오정합 문제 중 수심 불일치와 수신배열 센서의 기울기 불일치가 발생할 경우, 정합장 처리 기반 음원 위치 추정 성능에 미치는 영향을 분석한다. 수식 유도는 선행 연구[8]를 기반으로 하되, 본 연구에서는 거리 독립 조건을 가정하였다. 자세한 유도 과정은 부록에 제시하였다. 해수면을 =0, 해저면을 로 하는 압력 소멸 경계로 둘러싸인 이상적인 도파관에서 정규 모드 이론을 기반으로 계산된 정합장 처리의 음원 위치추정 식은 다음과 같이 정의된다.
여기서 는 수신배열 센서에 수신된 데이터를, 은 음향 모델을 이용해 계산된 복제 음장을 나타낸다. 는 번째 수신 센서와 음원 사이의 수평거리를, 는 번째 수신 센서가 위치한 지점에서의 수심을, 는 음원이 위치한 지점의 수심을, 그리고 ‘’는 복소켤레 연산을 나타낸다.
본 장에서는 데이터와 복제 음장 모두 거리 독립적 상황을 가정하며 이는 Eq. (2)와 같다.
여기서 은 모드 번호를, A는 모드의 진폭을, 은 고유함수를 의미한다. 이는 이상적인 도파관에서 로 표현된다. sin 함수의 내부 항은 수직파수이며 으로 정의된다. 이때 는 파수를 칭한다. 은 번째 수신 센서가 위치하는 수심에 따른 고유 함수값을, 은 n번째 모드의 수평 파수를 의미하고, 고유값이라고도 한다.
Eq. (1)에 Eq. (2)에서 정의한 데이터와 복제 음장을 각각 대입하여 정리하면, Eq. (3)과 같이 나타낼 수 있다. 이때 과 은 번째 모드에 따라 결정되는 진폭 항으로, 거리에 독립적인 항들로 구성된다.[8] 지수항에 포함된 과 은 각각 데이터와 복제 음장에서의 수평 파수 차이를 나타낸다. 정합장 처리 기반 거리 추정은 데이터와 복제 음장 간 수평 파수 차이에 의해 결정되므로, 대괄호 안에 포함된 첫 세 항은 거리 추정에 직접적인 영향을 미치지 않음을 알 수 있다.[8] 이에 따라, 음원 거리 추정에 유효한 항만을 남겨 식을 단순화하면 Eq. (4)와 같이 나타낼 수 있다.
여기서 교차항은 서로 다른 모드 간의 계산 항을 나타낸다. 정합장 처리를 활용한 거리 추정은 지수항에 포함된 아래의 두 가지 방정식을 동시에 만족함으로써 결정된다.
여기서 는 정수를 의미한다. 부록(Appendix) Eq. (A1)에 제시된 바와 같이, Eq. (5b)에서 수평 파수를 로 정의하고, 이를 테일러 급수 전개를 사용하여 표현하면 다음과 같다.
Eq. (6)을 활용하여 수심 불일치 및 수신배열 센서 기울기 불일치 조건에서의 정합장 처리 성능을 수식을 통해 다음 절에서 논의하고자 한다.
2.1 수심 불일치
본 절에서는 수심 불일치 조건이 정합장 처리 기반 음원 거리 추정 성능에 미치는 영향을 수식적으로 분석한다. 부록(Appendix) Eq. (A2)에 제시된 바와 같이, Eq. (6)에 수심 불일치 조건을 적용하여 수식을 전개하면, 데이터와 복제 음장 간 수심 차이에 따른 음원 거리 추정식인 Eq. (7)을 얻을 수 있다.
여기서 는 도파관의 실제 수심을, 은 음향 모델의 입력 변수 중 하나인 해양 환경 정보에서의 수심을 나타낸다. 실제 수심과 추정된 수심 간 불일치에 따른 정합장 처리의 거리 추정 결과는 Fig. 1(a)에서 확인할 수 있다. 실제 수심과 복제 음장의 수심이 같은 경우()에는 실제 송수신기 사이의 거리와 추정된 거리가 일치하여 정확한 추정이 가능하다. 반면, 실제 수심보다 깊은 수심으로 가정한 경우()에는 음원과의 거리가 실제보다 더 멀리 있는 것으로 추정되어 과대 추정(over estimation)이 발생한다. 반대로, 실제 수심보다 얕은 수심으로 가정한 경우()에는 음원과의 거리가 실제보다 더 가까운 것으로 추정되어 과소 추정(under estimation)이 발생한다. 이처럼 수심 불일치가 발생하면 음원이 실제와 다른 위치에 있는 것처럼 추정되는 결과를 도출하게 된다. 파란색 선은 과대 추정을, 하늘색 선은 정확 추정을, 초록색 선은 과소 추정을, 검은색 점선은 실제 송수신기 사이의 거리를 나타낸다. 이러한 모델 오정합을 신기루 현상에 비유하여 설명할 수 있다. 이는 실제 수심과 복제 음장 수심 간의 불일치로 인해 음원 거리 추정에 편향이 발생하고, 그 결괏값의 차이로 인해 거리 추정 오류가 발생하는 현상이다.
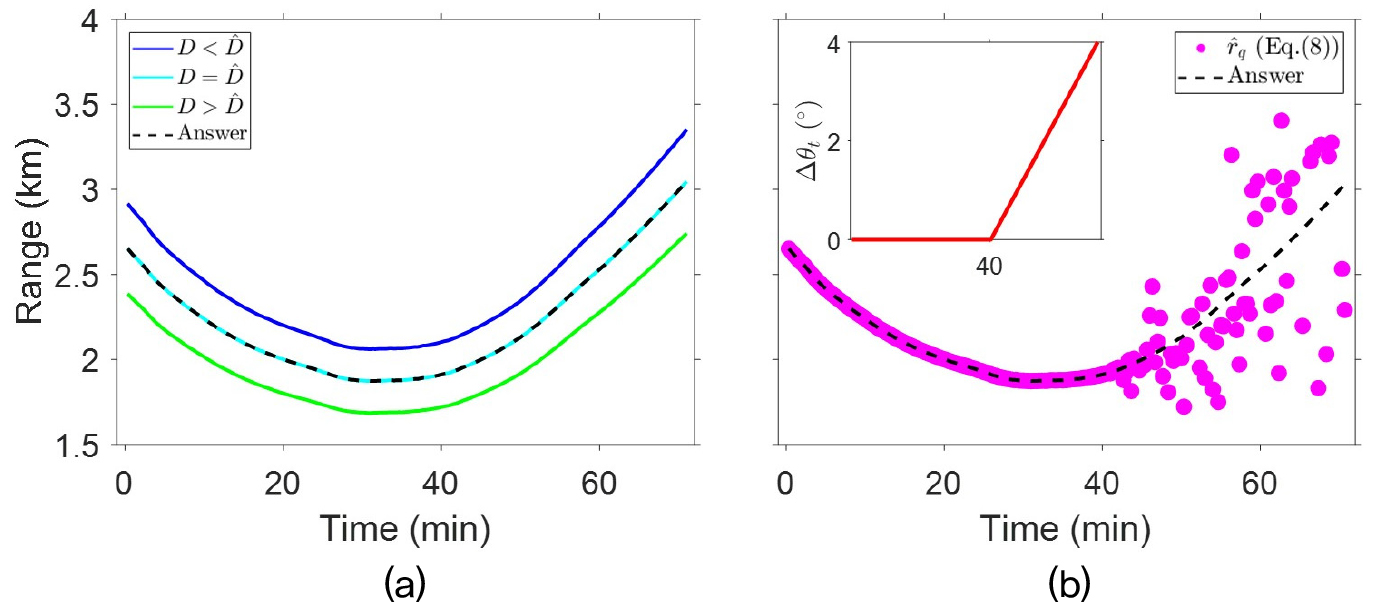
Fig. 1.
(Color available online) Model-based MFP performance results for depth and sensor tilt mismatches. (a) Depth mismatch: Over estimation occurs when the replica depth is greater than the actual depth, accurate estimation when they match, and under estimation when the replica depth is smaller. The blue, light blue, and green lines correspond to overestimation, accurate estimation, and underestimation, respectively, while the black dotted line represents the actual source range. (b) Sensor tilt mismatch: The upper-left figure illustrates the variation in the tilt of the receiving array over time. The black dotted line represents the actual source range, while the magenta dots indicate range estimates based on Eq. (8). As the sensor tilt increases, estimation errors become more pronounced.
2.2 수신배열 센서의 기울기 불일치
본 절에서는 수신배열 센서의 기울기 불일치가 정합장 처리 기반 음원 거리 추정 성능에 미치는 영향을 수식적으로 분석한다. 주로 복제 음장은 수직 배열 센서를 가정하며, 이는 기울기가 없는 이상적인 상황을 전제로 한다. 그러나 실제 측정된 데이터에서는 해류의 영향으로 수신배열 센서의 기울기가 발생하는 경우가 많다. 본 분석에서는 복제 음장 생성 시 가정된 수신배열 센서의 기울기와 실제 센서 기울기 간에 불일치가 존재하는 상황을 가정한다. 부록(Appendix) Eq. (A3)에 제시된 바와 같이, Eq. (6)에 수신배열 기울기 불일치 조건을 적용해 수식을 전개하면, 이에 따른 정합장 처리를 활용한 음원 거리 추정 식 Eq. (8)을 정의할 수 있다.
여기서 𝜃는 수신배열 센서에 들어오는 음파의 전파각도(grazing angle)[Fig. 3(a) 참조]를, 는 수직 배열 센서 기준으로부터 발생한 기울기를, 는 센서 사이의 간격, 는 센서 번호를 나타낸다. Fig. 1(b)는 수신배열 센서 기울기 불일치에 따른 정합장 처리의 거리 추정 결과를 나타낸다. 왼쪽 상단에 있는 그래프는 시간에 따른 수신배열 센서의 기울기 값(빨간색 선)을 의미한다. 여기서 전파각도는의 범위 내에 존재하며, 시간에 따라 변하는 랜덤 값을 사용하였다. 마젠타색 점은 음원 거리 추정값을, 검은색 점선은 실제 음원 거리를 나타낸다. 수신배열 센서의 기울기에 따라 정합장 처리의 음원 거리 추정 결과가 변하는 양상을 보였다. 수심 불일치로 인한 거리 추정 오차와는 달리, 센서 기울기의 영향을 받는 경우 사인 함수적 특성으로 인해 거리 오차가 특정 방향으로만 나타나지 않는 것이 확인되었다.
III. 머신러닝 기반 정합장 처리
본 장에서는 머신러닝 기반 정합장 처리를 적용한 음원 거리 추정 기법[12,13]을 논의한다.
3.1 입력 데이터 전처리
신호 처리 과정에서 복소 특성에 종속되지 않도록, 수신된 배열 압력을 정규화된 샘플 공분산 행렬(Sample Covariance Matrix, SCM)로 변환한다. L개의 센서에 수신된 데이터를 이산 푸리에 변환하면, Eq. (9)와 같이 주파수에 따른 데이터로 표현할 수 있다.
여기서 𝜖는 노이즈를, 는 소스 항을, 는 그린 함수를 나타낸다. 소스 진폭의 영향을 최소화하기 위해, 복소 압력은 다음과 같이 정규화된다.
정규화된 샘플 공분산 행렬은 번의 스냅샷된 데이터를 평균하여 켤레 대칭 행렬을 형성한다.
여기서 는 켤레 전치 연산자를 의미하며, 는 s번째 스냅샷에서의 정규화된 음압을 나타낸다. Eqs. (10)과 (11)에 따른 데이터 전처리는 그린 함수가 음원 위치 추정에 활용될 수 있도록 보장한다. 는 복소 공분산 행렬로 대각선 및 상삼각 행렬의 실수 및 허수 항을 묶어 의 크기를 가지는 하나의 입력 벡터 을 형성하며, 순방향 신경망 모델에 입력된다. 입력을 벡터화함으로써 메모리 사용이 최적화되고 계산 속도가 향상된다.
3.2 음원 거리 매핑
분류 문제에서 음원 거릿값 은 간격이 로 균등한 개의 거리 중심값( ) 중 가장 가까운 구간 중심에 매핑된다. 이 거리 은 1× 크기의 이진 벡터 로 변환되며, Eq. (12)와 같다.
여기서 은 입력 벡터 에 대해 음원이 거리 에 존재할 확률을 나타내는 정답 벡터로 사용된다. 예측 시에는 소프트맥스(softmax) 출력 분포 중 가장 높은 확률을 갖는 클래스가 최종적으로 추정된 음원 거리로 결정된다.
3.3 순방향 신경망 모델
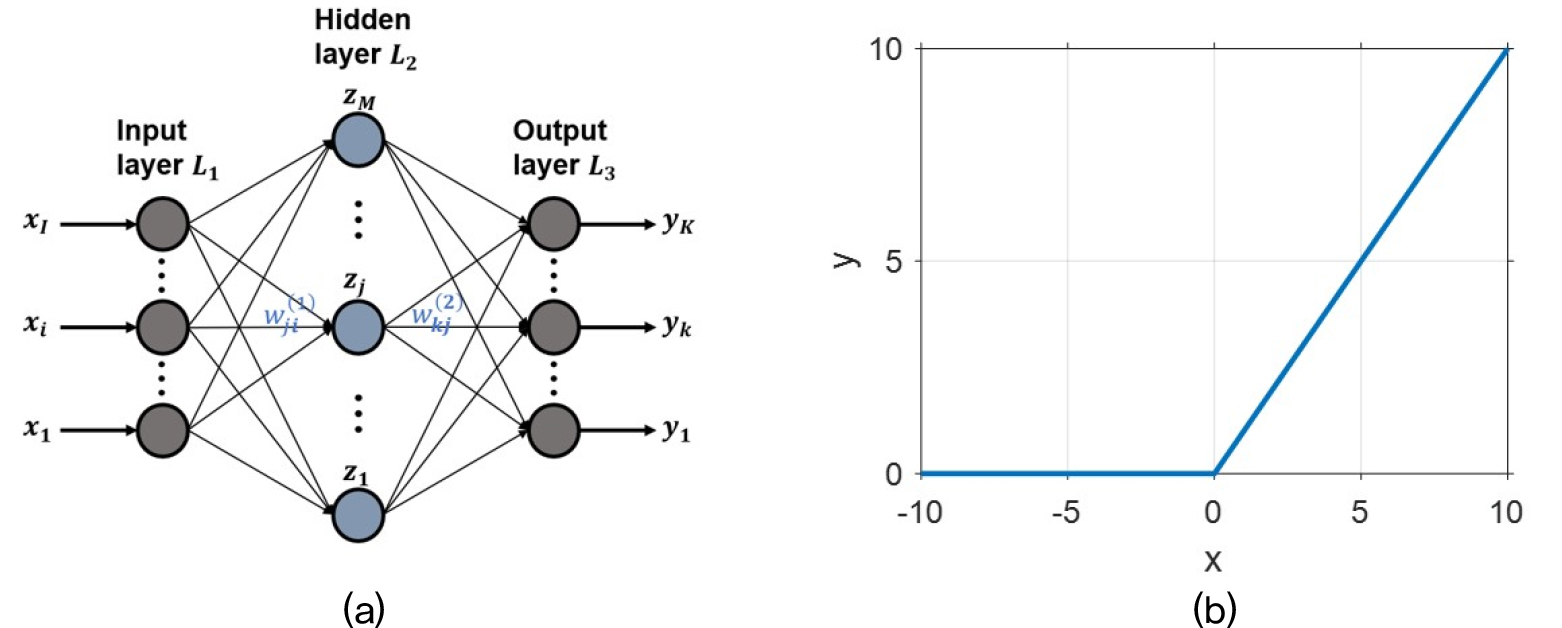
본 연구에서는 입력층, 은닉층, 출력층로 구성된 3층 구조의 순방향 신경망 모델(Feedforward Neural Network, FNN)을 사용하였으며, 해당 모델의 구조는 Fig. 2(a)와 같다. 입력층은 개의 입력 변수로 구성되며, 이는 다음과 같은 형태로 표현된다.
은닉층의 번째 뉴런이 받는 입력은 다음과 같다.
여기서 은 은닉층의 뉴런 수를, 와는 각각 가중치와 편향을, 는 가중 합 또는 전달함수를 나타낸다. 활성화 함수를 적용하면 Eq. (15)와 같이 표현되며, 본 연구에서는 은닉층의 활성화 함수로 Rectified Linear Unit(ReLU)를 사용하였다. 이와 관련된 수식은 Eq. (16)과 Fig. 2(b)에서 확인할 수 있다.
출력층에서는 개의 출력 뉴런을 사용하며 Eq. (17)로 표현된다. 이때 와는 각각 출력층의 가중치와 편향을 나타낸다.
출력층의 활성화 함수로는 소프트맥스 함수를 사용한다. 이는 다중 클래스 분류 문제에서 주로 활용되며, 모델의 출력을 각 클래스에 대한 확률 분포로 변환하는 역할을 하며 다음과 같이 정의된다.
신경망 훈련은 KL 발산(Kullback Leibler divergence) 을 최소화하는 것을 목적으로 하며, 실제 훈련에서는 크로스 엔트로피 손실 을 최소화하는 형태로 진행된다. KL 발산과 크로스 엔트로피의 수식은 Eq. (19)와 같다.
N개의 데이터 샘플에 대한 평균 크로스 엔트로피 손실 함수는 다음과 같이 정의된다.
신경망 훈련의 목표는 모델의 가중치를 학습하여 크로스 엔트로피 손실 함수를 최소화하는 것이다. 이는 Eq. (21)과 같이, 실제 라벨 와 모델이 예측한 확률 간의 로그 손실을 평균적으로 최소화하는 최적화 문제로 정의된다.
본 연구에서 사용한 신경망 모델은 에 개, 에 각각 128개와 64개, 에 개의 뉴런으로 구성된다. 과적합을 방지하기 위해 L2 정규화 기법을 적용하였으며, 최적화 알고리즘으로는 Adam Optimizer를 사용하였다. 모델 학습 시 초기 학습률은 0.001, 최대 반복 횟수(epoch)는 50회로 설정하여 훈련을 진행하였다.
IV. SAVEX15 실험
4.1 해상 실험 환경
2015년 5월, 동중국해 북동부 해역에서 연구선 온누리호(R/V Onnuri)를 이용한 Shallow-water Acoustic Variability EXperiment 2015(SAVEX15)[14] 해상 실험이 수행되었다. 실험 해역의 평균 수심은 약 100 m이며, 3.75 m 간격의 16개 센서로 구성된 56.25 m 길이의 수직 배열 센서가 음향 데이터 수신을 위해 사용되었다. Fig. 3(a)는 해상 실험이 수행된 지역의 모식도이며, 음속 구조는 JD145(5월 25일) 전후 두 개의 Conductivity, Temperature, and Depth(CTD) 측정값의 평균으로 비대칭적인 수중 음향 축을 이루고 있다. Fig. 3(b)는 실험 해역의 일부 해저지형 정보를 나타낸다. 본 연구에서 분석하는 두 개의 데이터는 서로 다른 날짜에 수신되었으며, 이동 경로를 중첩하여 나타냈다. 5월 26일 17시 37분부터 18시 10분 사이에 수신된 데이터(검은색 점선)는 모델 학습을 위한 훈련 데이터로 활용되었으며, 5월 25일 18시 14분부터 19시 24분 사이에 수신된 데이터(마젠타색 실선)는 테스트용으로 사용되었다. 선박의 이동 경로는 수직 배열 센서(VLA, 빨간색 점)로부터 1.8 km ~ 3 km 범위 내에 위치하며, 이동방향은 화살표 방향과 같다. 여기서 VLA는 Vertical Line Array를 의미한다. Fig. 4는 SAVEX15 데이터에서 수직 배열 센서와 음원 간의 위치 관계를 기반으로 한 좌표계와 데이터의 수직 배열 기울기 분석 결과를 나타낸다. Fig. 4(a)는 수직 배열을 중심으로 해수면 근처의 온누리호가 음원으로 이용되는 상황을 나타낸다. 상향 진행하는 음향 경로는 양의 경사각(𝜃)으로 정의하며, 수신배열이 반시계 방향으로 회전하는 경우의 기울기 변화량()을 양으로 정의한다. Fig. 4(b)는 해당 시간에 추정된 수직 배열 기울기 각을 나타낸다.[9] 그래프에서 빨간색 선은 시간에 따른 훈련 데이터의 수신 배열 기울기를, 파란색 선은 테스트 데이터의 수신 배열 기울기를 나타내며, 검은색 점선은 두 데이터 간 시간에 따른 배열 기울기 차이를 나타낸다.
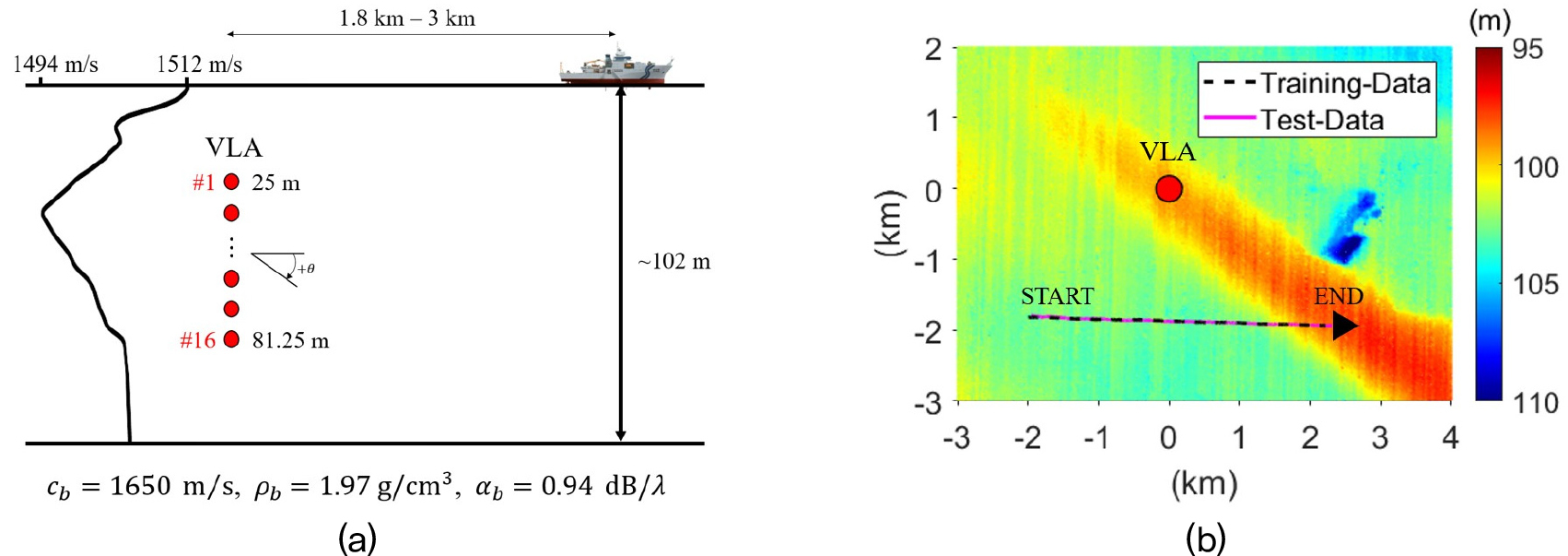
Fig. 3.
(Color available online) Schematic of a source-tow run on JD 15145-15146 (May 25-26) using the R/V Onnuri during SAVEX15. (a) A 16-element, 56 m long VLA moored in approximately 100 m deep water recorded the ship radiated noise (e.g., 200 Hz-900 Hz). The SSP is an average of two measured CTD profiles collected on JD 145, featuring an asymmetrical underwater sound channel. (b) shows the overlaid GPS ship tracks of the R/V Onnuri. The black dotted line represents the ship moving at 4 knots (2.05 m/s) for 34 minutes (17:37-18:10 UTC), labeled as Training-Data. The magenta line represents the ship moving at 2 knots (1.03 m/s) for 71 minutes (18:14-19:24 UTC), labeled as Test-Data. The arrow direction indicates the movement direction, and the red dot represents the VLA.
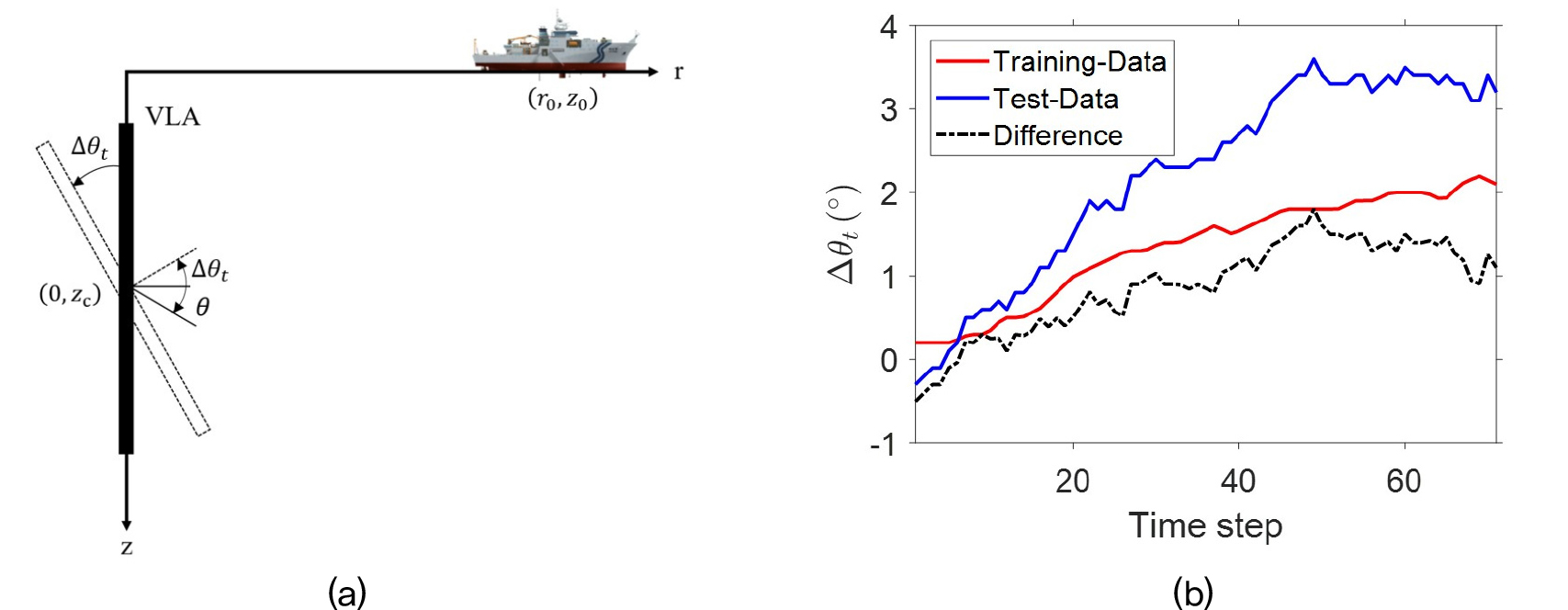
Fig. 4.
(Color available online) (a) Coordinate system including a VLA centered at (0,) and a surface ship located at (,). A positive grazing angle is assigned to an upgoing ray path, while the tilt angle is defined as positive for counter-clockwise rotation in the source-receiver plane. (b) The red line shows the estimated tilt angle of the Training-Data, the blue line shows that of the Test-Data, and the black dotted line represents their difference, derived from the data as the estimated tilt angle of the receiving array.
4.2 데이터 분석 결과
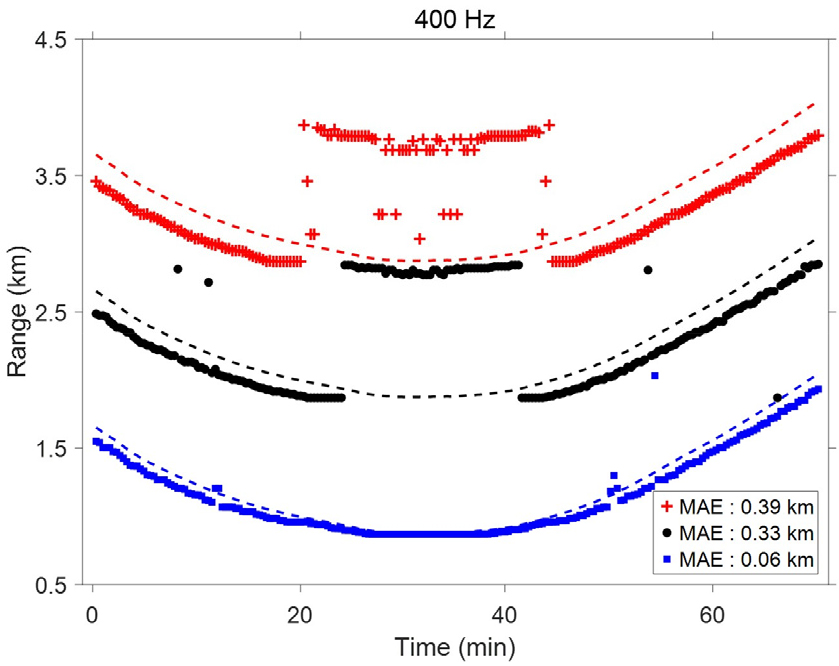
본 절에서는 Fig. 3에 제시된 해양 음향 환경 조건에서 수신된 데이터를 활용하여, 테스트 데이터를 기반으로 수행된 음향 모델 기반 정합장 처리와 훈련 데이터로 학습된 모델을 이용해 테스트 데이터를 추론하는 머신러닝 기반 정합장 처리를 적용한 음원 거리 추정 결과를 분석한다. Fig. 5(a) ~ (c)는 300 Hz, 400 Hz, 500 Hz에서의 음향 모델 기반 정합장 처리를 적용한 테스트 데이터의 음원 거리 추정 결과이다. 검은색 선은 실제 선박 이동 경로를, 파란색 점은 음향 모델 기반 정합장 처리 기법으로 추정된 음원 거리를 나타낸다. 테스트 데이터는 약 1.03 m/s 속도로 71 min 동안 이동하는 선박으로부터 방사된 광대역(200 Hz ~ 900 Hz) 소음이다. 테스트 데이터를 2 s 간격으로 분할한 뒤, 각 구간에서 24개의 스냅샷을 추출하고 이를 평균화하여 공분산 행렬(Cross Spectral Density Matrix, CSDM)을 계산한다. 본 분석에서는 결과 해석의 명확성과 연산량 감소를 위해 20개 데이터 간격으로 샘플링하여 총 213개의 테스트 데이터 샘플을 사용하였다. 복제 음장의 계산을 위해 정규 모드 기반의 KRAKEN 모델[15]을 사용하였으며, 수심 100 m의 거리 독립적인 평탄한 해저 지형을 가정하였다. 세부적인 음향 모델 기반 정합장 처리 방법은 Reference [16]을 참고하였다. Fig. 5(a) ~ (c) 결과를 분석하면, 복제 음장은 100 m의 수심을 가정하였으나 실제 수심은 음원의 이동 경로에 따라 변동하므로 수심 불일치가 발생하며, 이로 인해 신기루 현상이 나타난다. 또한, 복제 음장에서 가정한 수신배열 센서의 기울기와 실제 수신배열 센서 기울기 간 불일치로 인해 거리 추정 오차가 발생하였다. 특히 수직 배열 센서 기준으로부터 발생한 기울기가 약 1.3° 이상일 때(≥1.3°) 거리 추정 오차가 비선형적으로 증가하였다. 이는 II장에서 분석한 Eq. (7)과 Eq. (8)을 통해 수식적으로 설명할 수 있다. 또한 상대적으로 높은 주파수에서 배열 기울기에 따른 오정합 문제의 민감성이 증가함에 따라 거리 추정 오차가 심해지는 구간이 앞당겨지는 것이 확인되었다. 이는 Eq. (2)의 데이터 압력장을 통해 설명할 수 있다. 지수항()에 포함된 항을 살펴보면, 수평파수()와 송수신기 사이의 거리()가 곱해져 있다. 주파수가 높아질수록 수평 파수 값 역시 커지기 때문에 전체 값도 커지게 된다. 이는 수신배열 센서 기울기가 존재하는 데이터와 수직 배열을 가정하는 복제 음장 간의 차이로 이어져 주파수에 따라 비선형적으로 오차가 달라지는 원인으로 분석할 수 있다. 이를 통해, 음향 모델 기반 정합장 처리를 적용한 음원 거리 추정 성능은 오정합 문제, 특히 수심 불일치와 수신배열 센서 기울기 불일치의 영향을 받으며 주파수 대역에 따라 성능 차이가 발생하는 것을 확인할 수 있다.
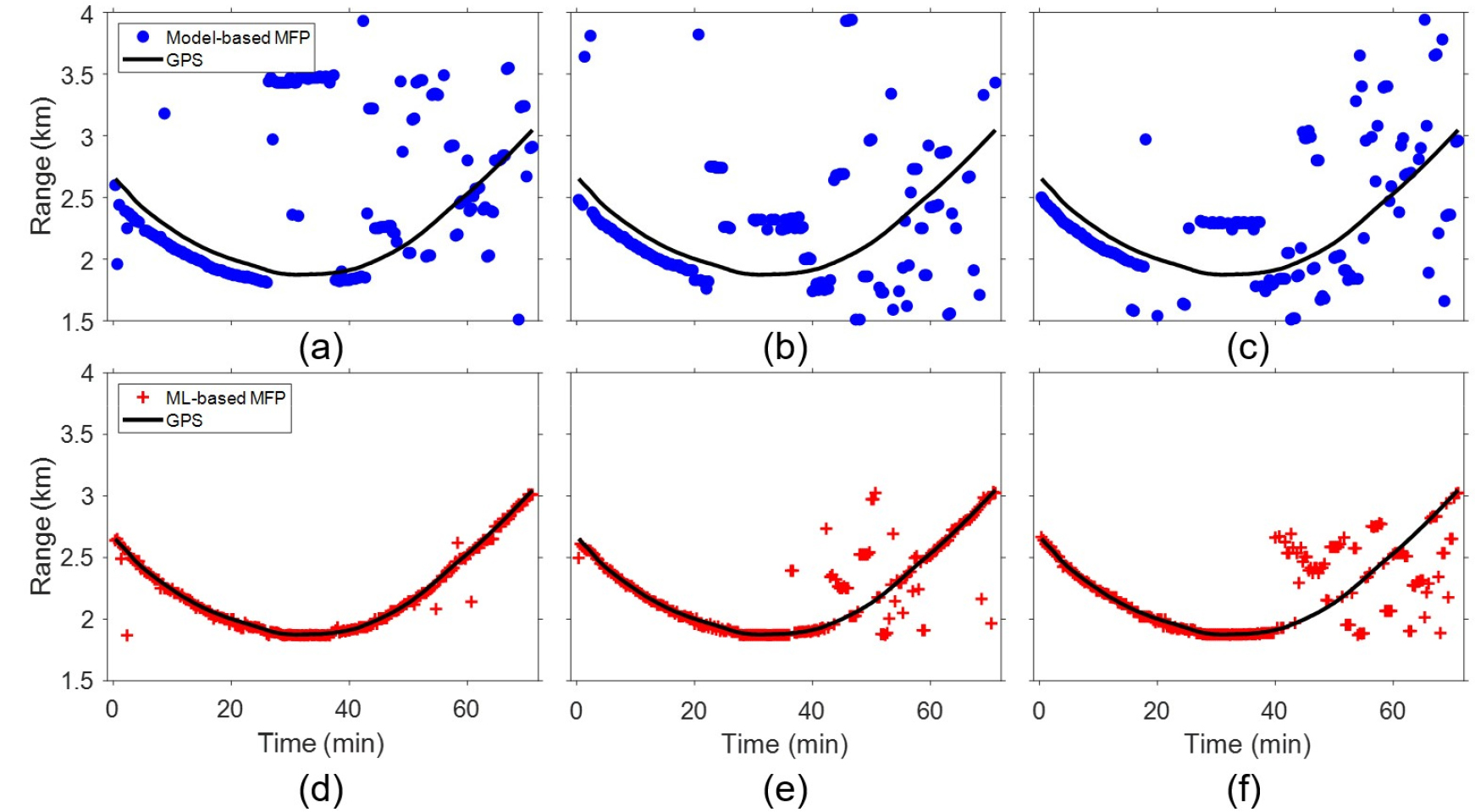
Fig. 5.
(Color available online) (a, b, c) show the source range estimation results of the Test-Data using Model-based MFP at 300 Hz, 400 Hz, and 500 Hz. The black line indicates GPS ship tracks of the R/V Onnuri, while the blue dots represent the source range estimated by Model-based MFP. (d, e, f) show the source range estimation results using ML-based MFP at 300 Hz, 400 Hz, and 500 Hz, where the model was trained on Training-Data, evaluated on Test-Data, and the red plus symbols represent the source range estimation results.
Fig. 5(d) ~ (f)는 300 Hz, 400 Hz, 500 Hz에서의 머신러닝 기반 정합장 처리를 적용한 음원의 거리 추정 결과이다. 머신러닝 알고리즘으로 학습된 모델을 훈련 데이터로 훈련한 뒤, 테스트 데이터로 음원 거리 추정 성능을 평가하였다. 훈련 데이터는 약 2.06 m/s 속도로 34 min 동안 이동하는 200 Hz ~ 900 Hz의 광대역 선박 소음 데이터이며 테스트 데이터와 동일한 데이터 전처리를 적용하였다. 결과 해석의 명확성과 연산량 감소를 위해 4개 데이터 간격으로 샘플링하여 총 510개의 훈련 데이터 샘플을 사용하였다. 검은색 선은 실제 선박 이동 경로, 빨간색 플러스 기호(+)는 머신러닝 기반 정합장 처리 기법으로 추정된 음원 거리이다. 머신러닝 기반 정합장 처리 결과를 분석하면, 훈련 데이터와 테스트 데이터는 온누리호가 유사한 경로를 따라 이동한 데이터이므로 수심이 거의 동일하여 수심 불일치가 발생하지 않았다. 하지만 Fig. 4(b)를 통해 시간에 따라 훈련 데이터와 테스트 데이터의 수신배열 센서 기울기 값에 차이가 있음을 확인할 수 있다. 이러한 이유로, 머신러닝 기반 정합장 처리는 수신배열 센서 기울기 불일치로 인한 오정합 문제가 발생한다. 음향 모델기반 정합장 처리 결과와 비교했을 때, 머신러닝 기반 정합장 처리는 수심 불일치가 존재하지 않으므로 신기루 현상이 발생하지 않았으나 수신배열 센서 기울기 불일치에 따른 거리 추정 오차가 발생함을 확인할 수 있다. 단, 머신러닝 기반 정합장 처리는 모델 학습 시 레이블링 범위가 사전에 정의되므로 음원 거리 추정이 해당 범위 내에서만 수행된다는 차이가 있다. 음향 모델 기반 정합장 처리 결과와 동일하게 주파수가 높아질수록 수신배열 센서 기울기에 따른 거리 추정 오차가 증가하였다. 음향 모델 기반 정합장 처리는 데이터의 수신배열 센서 기울기가 약 1.3° 이상일 경우 오차가 크게 증가하였고, 머신러닝 기반 정합장 처리는 훈련 데이터와 테스트 데이터 간 기울기 차이가 약 1.3°를 초과할 때부터 오차가 크게 발생하기 시작하였다. 따라서 머신러닝 기반 정합장 처리 역시 훈련 및 테스트 데이터 간 수신배열 센서 기울기의 일치 여부에 따라 거리 추정 성능이 달라짐을 확인할 수 있다.
V. 수치 시뮬레이션
본 장에서는 오정합 조건에 따른 음향 모델 기반 정합장 처리와 머신러닝 기반 정합장 처리의 음원 거리 추정 성능을 시뮬레이션으로 분석한다. 수심 불일치와 수신배열 센서 기울기 불일치 조건이 각각 개별적으로 존재하는 경우와 두 불일치가 동시에 존재하는 경우로 나누어 분석한다. 해상실험 데이터(Fig. 5 참조)와의 비교를 위해 앞서 분석한 훈련 데이터와 테스트 데이터의 해양 음향 환경 조건, 온누리호의 이동경로, 수신배열 센서의 기울기 정보를 동일하게 사용하였다. 데이터와 같은 조건을 만들기 위해 잡음 환경에서 음향 신호의 신호 대 잡음비는 실 데이터 값인 32 dB로 설정하였다.
5.1 수심 불일치
수심 불일치를 고려하기 위해 정규 모드 기반 KRAKEN 모델을 사용하여 생성한 데이터의 수심은 103 m, 복제 음장의 수심은 100 m로 설정하였다. Fig. 6(a) ~ (c)는 300 Hz, 400 Hz, 500 Hz에서의 음향 모델 기반 정합장 처리를 적용한 음원의 거리 추정 결과이다. 실제 수심보다 복제 음장의 수심을 얕게 설정한 결과, 음원과의 거리가 실제보다 더 가까운 것으로 나타나는 과소 추정이 발생하였다. 이는 II장에서 언급한 Eq. (7)로 설명 가능하다. Fig. 6(c)에서는 모든 구간에서 과소 추정이 일관되게 발생하지 않으며, 추정 오차가 크게 나타나는 특정 구간이 관찰된다. 이러한 현상은 음속 구조, 수심, 수신배열 센서의 설치 깊이 등 환경 요인에 따라 음향 전파 경로에 주기성이 나타나기 때문이며, 그 결과 데이터와 복제 음장 간 상관도가 높은 지점이 일정한 간격으로 반복되는 양상을 보인다. 해당 간격은 ray-cycle distance[17]와 일치하며, 이는 환경 및 배열 구조에 기인한 인위적인 상관도 증가 현상으로 해석할 수 있다.
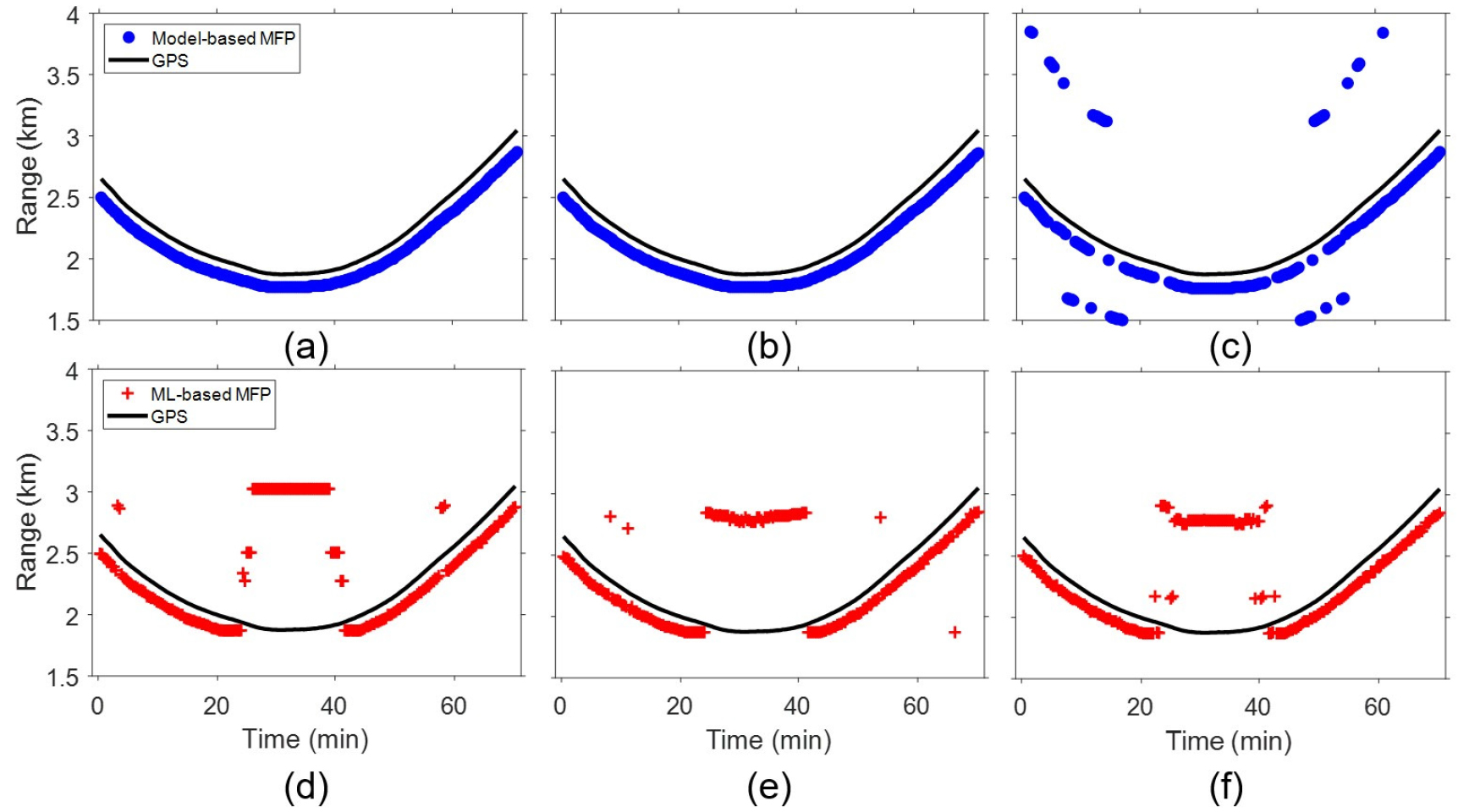
Fig. 6.
(Color available online) Depth mismatch cases for Model-based MFP simulation results are shown in (a), (b), and (c) at 300 Hz, 400 Hz, and 500 Hz, respectively. Depth mismatch cases for ML-based MFP simulation results are presented in (d), (e), and (f) at 300 Hz, 400 Hz, and 500 Hz, respectively.
Fig. 6(d) ~ (f)는 300 Hz, 400 Hz, 500 Hz에서의 머신러닝 기반 정합장 처리를 적용한 음원의 거리 추정 결과이다. 음향 모델 기반 정합장 처리 결과와 마찬가지로, 수심 불일치로 인해 음원 거리가 과소 추정되었으며, 이와 함께 ray-cycle distance에 해당하는 간격에서 주기적인 추정 오차가 발생하였다. 특히 CPA 부근의 성능 저하는, 부록(Appendix) Fig. 1A에 제시된 바와 같이 송수신기 간 거리 변화에 따른 머신러닝 기반 정합장 처리의 정확도 저하에서 비롯된다. 이를 통해, 음향 모델 기반 정합장 처리뿐만 아니라 머신러닝 기반 정합장 처리 역시, 수심 불일치에 따른 오정합 문제가 발생함을 확인할 수 있다.
5.2 수신배열 센서의 기울기 불일치
본 절에서는 수신배열 센서의 기울기 불일치에 따른 음향 모델 기반 정합장 처리와 머신러닝 기반 정합장 처리 성능을 분석한다. Fig. 7(a) ~ (c)는 각각 300 Hz, 400 Hz, 500 Hz에서의 음향 모델 기반 정합장 처리의 음원 거리 추정 결과이다. Fig. 5(a) ~ (c)의 SAVEX15 데이터를 활용한 음향 모델 기반 정합장 처리 결과와 마찬가지로, 수신배열 센서 기울기가 1.3° 이상일 경우, 거리 추정 오차가 크게 발생하며 이는 Eq. (8)로 설명할 수 있다. 또한 주파수가 높아질수록 기울기 불일치에 따른 거리 추정 오차가 민감해지는 것을 확인할 수 있다.
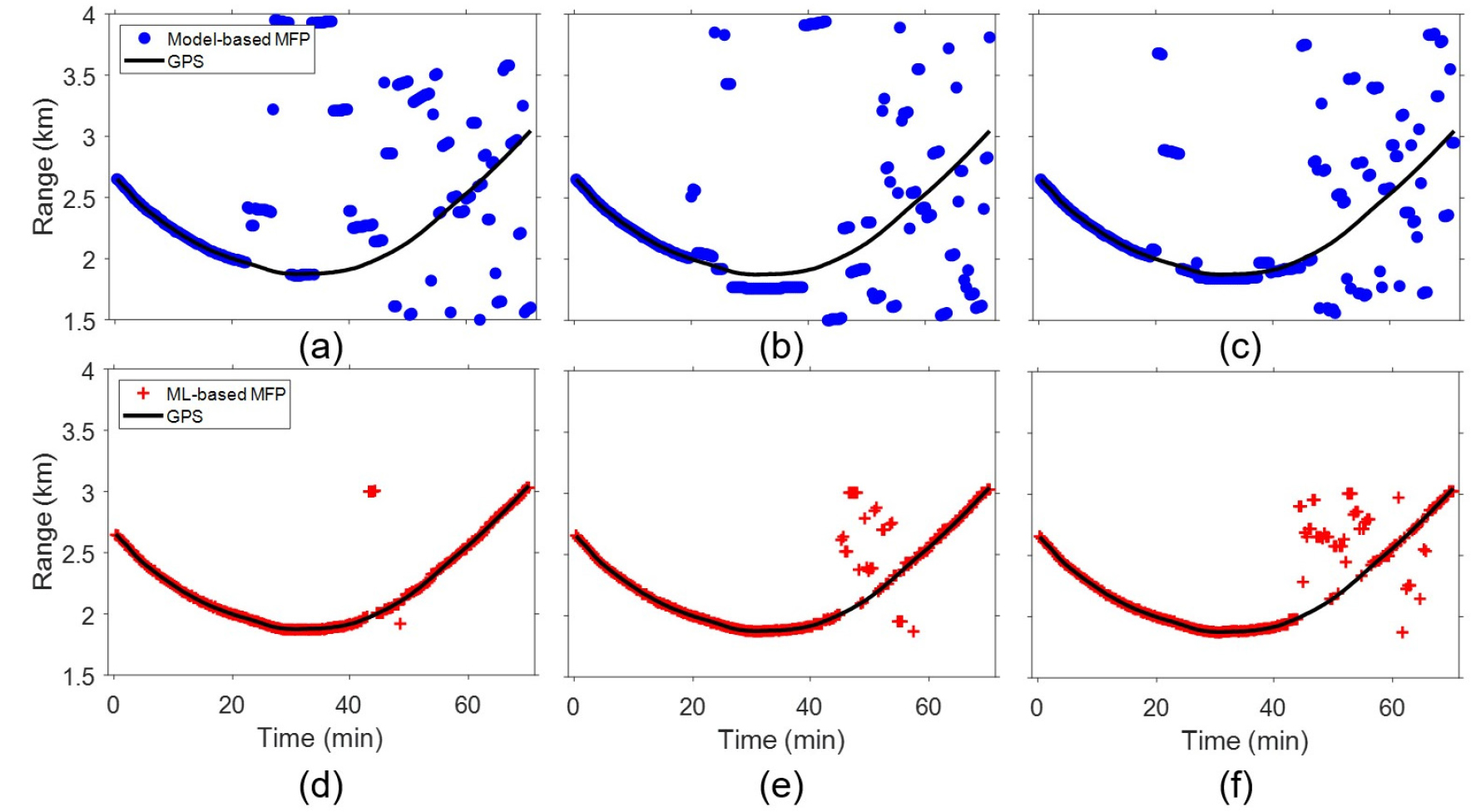
Fig. 7.
(Color available online) Tilt mismatch cases for Model-based MFP simulation results are shown in (a), (b), and (c) at 300 Hz, 400 Hz, and 500 Hz, respectively. Tilt mismatch cases for ML-based MFP simulation results are presented in (d), (e), and (f) at 300 Hz, 400 Hz, and 500 Hz, respectively.
머신러닝 기반 정합장 처리 결과는 Fig. 7(d) ~ (f)이며 순서대로 300 Hz, 400 Hz, 500 Hz일 때의 결과이다. 음향 모델 기반 정합장 처리는 데이터의 수신배열 기울기와 복제 음장의 기울기 값 차이에 의해 거리 추정 성능이 달라진다. 반면, 머신러닝 기반 정합장 처리는 훈련 데이터와 테스트 데이터 간 수신배열 기울기 차이가 1.3° 이상이 되는 경우부터 거리 추정 오차가 증가하기 시작한다. 음향 모델 기반 정합장 처리에 비해 상대적으로 추정 오차가 작은 이유는 모델을 훈련시킬 때 라벨링 범위를 훈련 데이터의 거리 구간으로 설정하였기 때문이다. 그러나 머신러닝 기반 정합장 처리 역시, 주파수가 높아질수록 수신배열 기울기 불일치에 따른 오정합 문제로 거리 추정 성능이 저하되는 것을 확인할 수 있다.
5.3 수심 및 배열 센서의 기울기 불일치
본 절에서는 앞서 언급한 수심 불일치와 수신배열센서의 기울기 불일치가 동시에 존재하는 데이터를 사용하여 음향 모델 기반 정합장 처리와 머신러닝 기반 정합장 처리의 음원 거리 추정 결과를 분석한다. Fig. 8(a) ~ (c)는 음향 모델 기반 정합장 처리를 적용한 음원의 거리 추정 결과이며 순서대로 300 Hz, 400 Hz, 500 Hz 단일 주파수에서의 결과이다. 수심 불일치에 의해 과소 추정이 발생하고 단일 오정합이 존재할 때보다 수신배열 센서 기울기 불일치에 따른 거리 추정 오차가 크게 발생하였다. 또한 주파수가 높아질수록 기울기 불일치에 따른 거리 추정 오차가 더욱 민감해지는 양상을 보였다. 단일 불일치 조건보다 두 개의 불일치가 동시에 발생한 상황에서의 음향 모델 기반 정합장 처리 결과 성능이 저하되는 것을 확인할 수 있다.
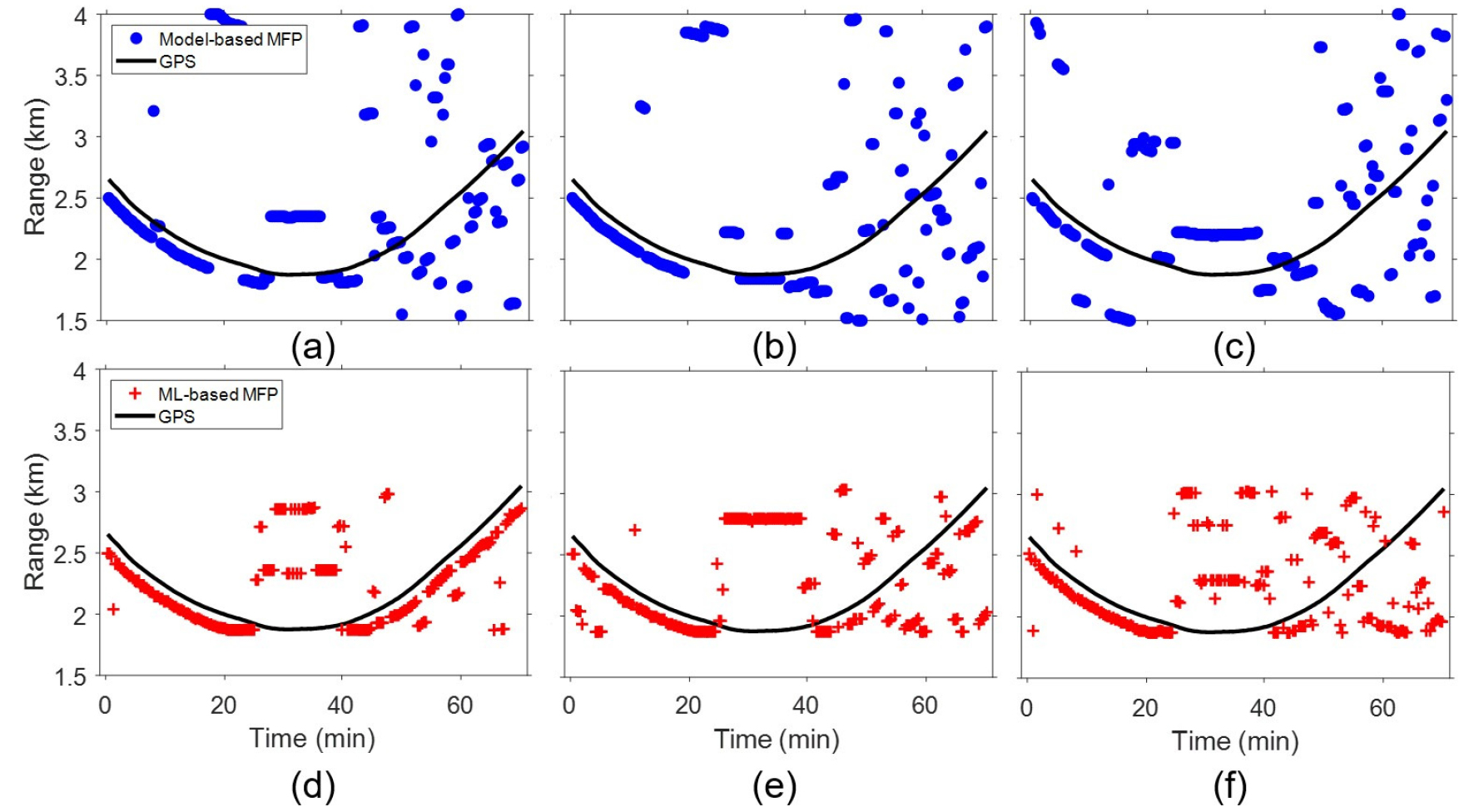
Fig. 8.
(Color available online) Depth & Tilt mismatch cases for Model-based MFP simulation results are shown in (a), (b), and (c) at 300 Hz, 400 Hz, and 500 Hz, respectively. Depth & Tilt mismatch cases for ML-based MFP simulation results are presented in (d), (e), and (f) at 300 Hz, 400 Hz, and 500 Hz, respectively.
머신러닝 기반 정합장 처리 결과는 Fig. 8(d) ~ (f)이며 순서대로 300 Hz, 400 Hz, 500 Hz일 때의 결과이다. 머신러닝 기반 정합장 처리 역시 수심 불일치에 의한 과소 추정과 수신배열 기울기 불일치에 의한 거리 추정 오차가 발생하였다. 음향 모델 기반 정합장 처리는 데이터의 수신배열 기울기와 복제 음장을 생성하는 데에 사용된 배열 기울기 값 차이에 의해 거리 추정 성능이 달라진다. 반면, 머신러닝 기반 정합장 처리는 훈련 데이터와 테스트 데이터의 수신배열 기울기 차이에 따라 오차가 달라졌다. 머신러닝 기반 정합장 처리 역시, 주파수가 높아질수록 오정합 문제에 따른 성능이 저하되는 것을 확인할 수 있다. 또한 단일 불일치 조건보다 두 개의 불일치가 동시에 발생한 상황에서의 머신러닝 기반 정합장 처리 결과 성능이 저하되는 것을 확인할 수 있다. 이를 통해, 음향 모델 기반 정합장 처리뿐만 아니라 머신러닝 기반 정합장 처리 역시 오정합 문제로 인해 음원 거리 추정 성능이 저하될 수 있음을 확인할 수 있다.
VI. 결 론
음향 모델 기반 정합장 처리는 정확한 해양 환경 정보 및 수신배열 센서의 기울기 정보를 얻기 어려운 경우 오정합 문제가 발생하여 음원 위치 추정 성능이 저하된다. 이를 해결하고자 Niu의 머신러닝 기반 정합장 처리에 관한 연구가 진행되었으나 오정합 관점에서 분석한 결과는 제시되지 않았다.
본 논문에서는 실제 해상 실험 데이터와 수치 시뮬레이션 결과를 바탕으로, 기존 음향 모델 기반 정합장 처리와 머신러닝 기반 정합장 처리를 오정합 문제 특히, 수심 불일치와 수신배열 센서 기울기 불일치 조건에서 수식적으로 분석하였다. 두 기법 모두 수심 불일치에 의한 신기루 현상이 발생하였고 상대적으로 높은 주파수에서 추정 성능이 저하되었다. 음향 모델 기반 정합장 처리는 데이터의 수신배열 기울기와 복제 음장 생성에 사용된 수신배열 기울기 값 차이에 따라 거리 추정 성능이 영향을 받았다. 반면 머신러닝 기반 정합장 처리는 훈련 데이터와 테스트 데이터의 수신배열 센서 기울기 값 차이에 따라 결과가 달라졌다. 또한, 단일 오정합 조건보다 복수의 오정합이 동시에 존재하는 경우, 두 기법 모두 추정 성능이 저하된다는 것을 확인하였다. 이러한 결과를 통해, 머신러닝 기반 정합장 처리 역시 오정합 문제로 인해 음원 거리 추정 성능이 저하될 수 있다는 사실을 확인하였으며, 이는 본 연구의 주요 의의이다.