

I. 서 론
II. 갭 필링과 클러터 필터링
III. 미러링 기반의 갭 필링 방법
3.1 미러링 기반의 갭 필링의 원리 및 문제점
3.2 개선안 : 다중대역 미러링
3.3 시뮬레이션 및 실험
IV. 자기회귀(Autoregressive) 모델 기반의 갭 필링
4.1 배경
4.2 개선안
4.3 시뮬레이션 및 실험
V. 계산량 및 오차 비교
IV. 결 론
I. 서 론
초음파진단기의 펄스파 도플러 모드[1]에서 대상체의 속도를 나타내는 스펙트럼 영상 및 음향과 B모드 2차원 단층 영상을 실시간으로 동시에 보여주는 B-D 동시모드(B-D simultaneous mode)는 도플러 영상을 구성하는 신호가 B모드 2차원 단층영상의 어느 부위에서 얻어지는지를 실시간으로 파악할 수 있다는 장점이 있어 널리 사용되어 왔다. 가장 기본적인 B-D 동시모드의 데이터 획득 방법은, 일정 시간간격으로 초음파 송수신을 계속 반복하되, 한 번은 B모드를 위해, 그 다음 번은 펄스파 도플러 모드를 위해 시분할 송수신하는 방법이다. 이와 같은 방법은 도플러 신호 표본화 관점에서 표본화하는 시간 간격은 늘 일정하므로 신호처리 관점에서는 쉽지만 도플러 모드의 실질적 PRF(Pulse Repetition Frequency)를 절반으로 떨어뜨리므로 알리아싱(aliasing)이 심하게 발생하는 문제가 있다.
B 모드를 위한 송수신을 도플러를 위한 송수신 사이사이에 배치하면서도 도플러 PRF를 떨어뜨리지 않기 위한 시도는 여러 가지가 있어왔으나,[2-6] 그 중 가장 실용적으로 널리 구현되어 온 방법이 소위 갭 필링(gap filling) 방법[2-3], [7-9]이다. 이 방법에서는 도플러 모드와 B모드를 매번 번갈아 송수신하지 않고, 일정 구간 동안은 도플러 모드만을 위해 반복 송수신하고, 그 다음 구간 동안은 B모드만을 위해 반복 송수신하며, 이 전체 동작을 계속 반복하는 것이다. 이 경우, 각 구간의 시간적 길이를 조절함으로써 도플러와 B모드를 위한 시간 배분 비율이 어느 정도 자유로이 조절 가능하고, 또 도플러의 PRF가 절반으로 떨어지지 않는다는 장점이 있지만, B모드를 위하여 송수신하는 구간에서는 도플러 데이터가 얻어지지 않는다는 문제가 있다. 그 구간은 도플러 데이터 입장에서는 갭이 된다. 이 도플러 데이터를 쓰면 일반적 도플러 데이터를 처리하는 방법으로는 정상적 도플러 음향 및 스펙트럼 영상을 얻을 수 없다. 따라서 일반적으로는 그 갭 전후의 인접한 데이터들을 써서 갭을 적절히 채워 연속적 도플러 데이터 형태로 바꾸어준 다음 기존 신호처리방법과 거의 동일한 신호처리를 한다. 펄스 도플러 모드에서 이렇게 갭을 만들고 이를 채우는 과정을 사용하는 방법을 여기서는 [3,8]에서 부른 대로 갭 필링이라 부르기로 한다.
갭 필링은 데이터의 일부 구간이 주기적으로 유실되었을 때 그 신호를 복원하는 일종의 보간(inter-polation)이라 볼 수 있다. 일반적 음성 또는 음악 데이터에 그러한 보간을 적용하는 연구는 이전부터 이루어져 왔으며, 그 예들이 있다.[12-13] 하지만, 특히, 저가형 또는 휴대용 초음파진단기는 실시간 영상을 제공해야 하는 반면 장치의 복잡도가 어느 정도 제한되어 있기 때문에 가능한 한 연산량을 줄여야 하므로 이러한 방법들을 그러한 초음파진단기에 그대로 적용하기는 어렵다.
또 갭 필링은 이미 몇몇 선발업체의 여러 시스템에 적용되어 출시되어 왔으나 그 방법들이 정확히 공개되어 있지는 않고 있고, 다만 논문, 특허 등에서 일부 보고되어 있다.[2-3], [7-9] 이들 중 연산량이 적어 저가 또는 휴대용 초음파진단기에 구현하기가 그나마 가장 용이해 보이는 것이 미러링(mirroring)에 기반한 갭 필링 방법이고,[7] 그 다음이 자기회귀(auto-regressive) 모델에 기반한 방법이다.[9] 이 논문에서는 이 두 가지 방법을 휴대용, 또는 저가형 시스템에 적용하려 하였고, 그 과정에서 가능한 한 연산량은 그다지 늘지 않도록 하면서도 성능을 개선하는 알고리즘들을 찾고자 하였다.
갭 필링 알고리즘의 성능은 보통 결과의 도플러 음향 보다는 스펙트럼 영상에서 큰 차이를 보이므로 이 논문에서는 도플러 스펙트럼 영상의 아티팩트(artifact) 저감에 관해서만 연구하였다.
II. 갭 필링과 클러터 필터링
속도 ![]() 로 움직이는 산란체로부터의 초음파 에코신호의 도플러 편이주파수
로 움직이는 산란체로부터의 초음파 에코신호의 도플러 편이주파수 ![]() 는 일반적으로 다음과 같이 나타내진다.[1]
는 일반적으로 다음과 같이 나타내진다.[1]
![]() (1)
(1)
이 때 ![]() 는 송신된 초음파의 중심주파수,
는 송신된 초음파의 중심주파수, ![]() 는 초음파 빔과 산란체 운동방향이 이루는 각,
는 초음파 빔과 산란체 운동방향이 이루는 각, ![]() 는 초음파음속이다.
는 초음파음속이다.
혈류에서는 주로 적혈구가 산란체 역할을 하며, 초음파 에코 신호에는 무수히 많은 적혈구로부터의 신호가 중첩되어있다. 따라서 기저대역의 도플러 신호는 주파수 도메인에서 다음과 같이 표현할 수 있다.
![]() (2)
(2)
이 때 *는 주파수도메인에서의 convolution, ![]() 는 k번째 산란체의 도플러 편이 주파수를 나타내고,
는 k번째 산란체의 도플러 편이 주파수를 나타내고, ![]() 는 k번째 산란체로부터 돌아온 신호의 진폭과 위상을 나타낼 뿐 아니라 수신신호의 대역폭, 또 transit effect[10-11]등의 다양한 현상에 의한 주파수축상에서의 흐려짐도 반영한다. 이 신호는 샘플 볼륨내의 혈류 분포를 그대로 반영하고 있으며, 수정된 피리오도그램(modified periodogram)[1]을 써서
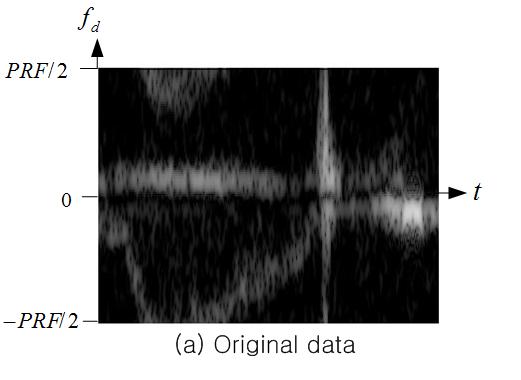
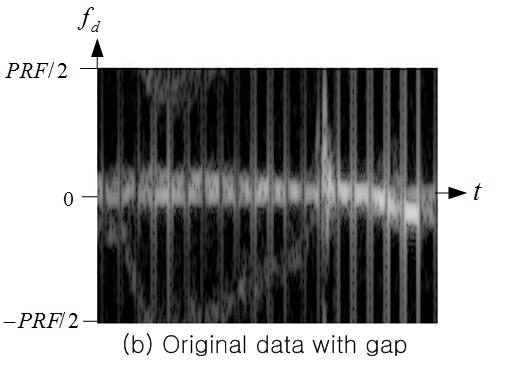
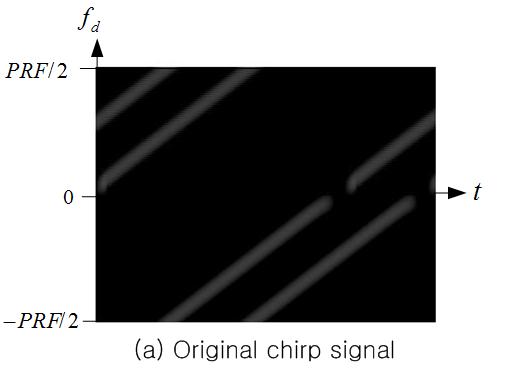
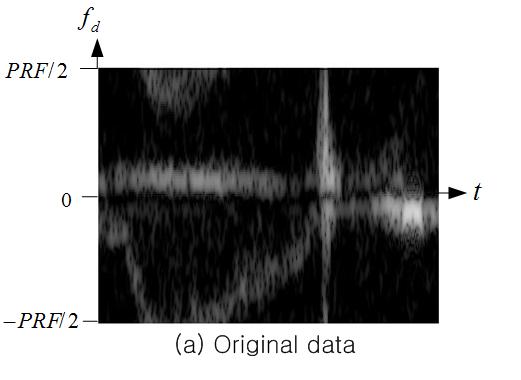
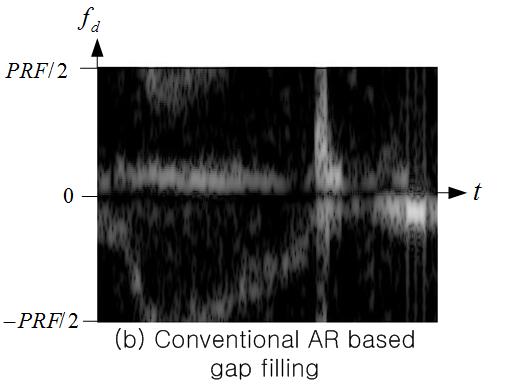
는 k번째 산란체로부터 돌아온 신호의 진폭과 위상을 나타낼 뿐 아니라 수신신호의 대역폭, 또 transit effect[10-11]등의 다양한 현상에 의한 주파수축상에서의 흐려짐도 반영한다. 이 신호는 샘플 볼륨내의 혈류 분포를 그대로 반영하고 있으며, 수정된 피리오도그램(modified periodogram)[1]을 써서 ![]() 를 추정하여 영상으로 스펙트럼을 나타냄으로써 혈류 유속분포를 실시간으로 화면에 표시한다. 그 일례를 그림 1(a)에 나타내었다. 이 영상을 구성하기 위한 원본 도플러 데이터의 중간중간에 규칙적으로 일정 구간을 0으로 치환하여 갭 필링 B-D 동시 모드에서의 도플러 데이터를 모사(simulation)한 후 갭 필링 하지 않은 채 그대로 처리해 보면 그 결과 영상에는 그림 1(b)와 같이 심각한 아티팩트가 생기게 된다.
를 추정하여 영상으로 스펙트럼을 나타냄으로써 혈류 유속분포를 실시간으로 화면에 표시한다. 그 일례를 그림 1(a)에 나타내었다. 이 영상을 구성하기 위한 원본 도플러 데이터의 중간중간에 규칙적으로 일정 구간을 0으로 치환하여 갭 필링 B-D 동시 모드에서의 도플러 데이터를 모사(simulation)한 후 갭 필링 하지 않은 채 그대로 처리해 보면 그 결과 영상에는 그림 1(b)와 같이 심각한 아티팩트가 생기게 된다.
도플러 신호 처리에서, 혈류 이외의 주변 조직 등으로부터의 신호인 클러터(clutter)는 불필요하여 보통 고역 여파기(high-pass filter)로 제거하고 있다. 그러나, 도플러 신호에 갭이 있는 경우, 클러터 신호를 일반적 고역 여파기로 제거하려면 과도 응답이 발생하는 문제점이 생기게 된다. 이를 피하기 위해 갭과 갭 사이의 연속된 도플러 신호 구간에서만 클러터 신호를 필터링하였으며, 이 때 발생하는 과도응답은 필터의 상태변수를 투영 초기화(projection initialization)[14]를 사용하여 최소화하였다. 아래에서는 이렇게 클러터 필터링을 한 신호에 대해 갭 필링하였다. 투영 초기화를 쓰더라도 앞부분에는 과도응답이 일부 남아 있으므로, 데이터의 순서를 역방향으로 뒤집어서도 필터링했고, 순방향 필터링과 역방향 필터링 결과를 교차 페이드(crossfade)하여 가능한 한 과도응답의 영향을 줄였다. 교차 페이드 할 때, 두 필터링 결과 신호의 가운데 부분의 위상이 일치하도록 위상을 보정해서 두 신호의 위상차에 의한 신호 진폭의 감소를 최소화하였다.
III. 미러링 기반의 갭 필링 방법
3.1 미러링 기반의 갭 필링의 원리 및 문제점
갭 필링 방법 중 가장 단순해 보이는 방법중 하나가 미러링(mirroring)을 기반으로 하는 방법이다.[7] 이것은 계산량이 매우 적어 보여 소형, 또는 저가형 시스템에 적합해 보인다. 이 방법의 원리를 간략히 다음과 같이 나타낸다: 기저대역의 도플러 신호를 매우 단순히 복소지수신호로 모델, 아래와 같이 나타내자.
![]() (3)
(3)
![]() 에 해당하는 부분은 실제 신호를 가지고 있고,
에 해당하는 부분은 실제 신호를 가지고 있고, ![]() 부분은 갭 구간이라 실제 신호가 없으며, 따라서
부분은 갭 구간이라 실제 신호가 없으며, 따라서 ![]() 부분의 신호로부터 미러링해서
부분의 신호로부터 미러링해서 ![]() 부분을 만들어내어야 하는 경우를 가정해 보자. 또,
부분을 만들어내어야 하는 경우를 가정해 보자. 또, ![]() 은 상수로 가정하자.
은 상수로 가정하자.
미러링 기반 갭 필링 방법은 말 그대로 복소평면상에서 갭 이전의 데이터를 거울에 비추어 갭 내부의 데이터를 만들자는 것인데, 다음과 같이 구현하면 간단히 계산할 수 있다: 일단, ![]() 가 실수축상에 오도록 원점을 중심으로
가 실수축상에 오도록 원점을 중심으로 ![]() 을 회전시킨 다음, 실수축을 거울로 삼아 미러링하여(즉 n의 부호를 바꾸고 공액복소수를 취하여) 잃어버린 데이터
을 회전시킨 다음, 실수축을 거울로 삼아 미러링하여(즉 n의 부호를 바꾸고 공액복소수를 취하여) 잃어버린 데이터 ![]() 을 만든다:
을 만든다:
![]()
for ![]() (4)
(4)
![]() 을 다시 역회전시켜 원래의 초기 위상을 가진
을 다시 역회전시켜 원래의 초기 위상을 가진 ![]() 를 만든다. 이것이 갭 필링할 데이터이다. 즉
를 만든다. 이것이 갭 필링할 데이터이다. 즉
![]()
for ![]() (5)
(5)
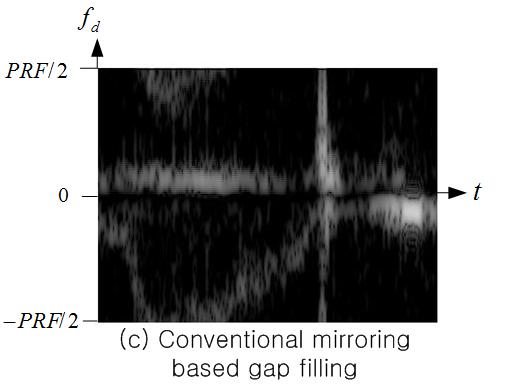
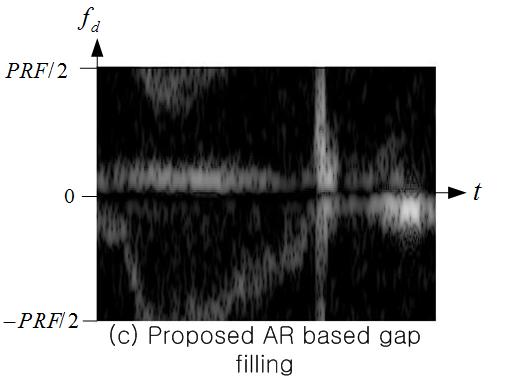
이런 경우는 갭 필링이 이상적으로 이루어졌다. 그러나, 실제 도플러 신호는 (2)와 같이 여러 가지 주파수성분을 가지는 신호인데, 이런 신호에서는 위와 같은 ![]() 관계가 성립하려면 모든 주파수성분들의 주파수가 동일하거나 초기위상이 동일해야 한다. 따라서, 일반적 도플러 신호에서는 미러링은 이상적이지 못하고 오차가 발생할 수밖에 없다. 이러한 오차로 말미암아 이런 방법으로 갭 필링된 신호의 스펙트럼에는 그림 1(c)와 같이 종종 눈에 띄는 아티팩트가 발생한다. 이러한 오차는 신호의 대역폭이 넓을수록 더욱 커지는데, 실제로 기저대역 도플러 데이터는
관계가 성립하려면 모든 주파수성분들의 주파수가 동일하거나 초기위상이 동일해야 한다. 따라서, 일반적 도플러 신호에서는 미러링은 이상적이지 못하고 오차가 발생할 수밖에 없다. 이러한 오차로 말미암아 이런 방법으로 갭 필링된 신호의 스펙트럼에는 그림 1(c)와 같이 종종 눈에 띄는 아티팩트가 발생한다. 이러한 오차는 신호의 대역폭이 넓을수록 더욱 커지는데, 실제로 기저대역 도플러 데이터는 ![]() 의 전 대역에 걸친 스펙트럼도 가질 수 있기 때문에 이 방법을 실용적으로 적용하기는 곤란해 보인다.
의 전 대역에 걸친 스펙트럼도 가질 수 있기 때문에 이 방법을 실용적으로 적용하기는 곤란해 보인다.
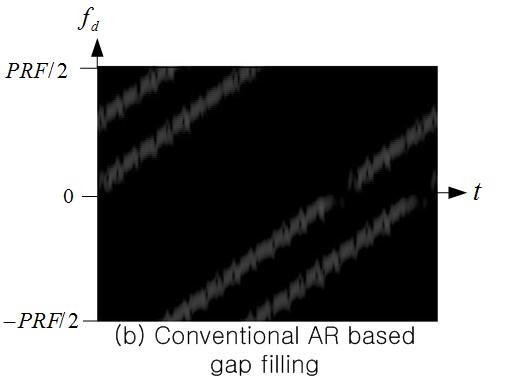
그림 1에 일례로 (a)갭이 없는 연속된 도플러 신호로부터 얻은 도플러 스펙트럼 영상, (b)이 데이터에 인위적으로 갭을 설정, 데이터의 일정 구간을 주기적으로 삭제(0으로 치환)한 신호로부터 얻은 도플러 스펙트럼 영상, (c)그 갭을 위와 같은 미러링을 통해 갭 필링한 신호로부터 얻은 도플러 스펙트럼 영상을 비교하였다. 이 때 데이터를 얻은 초음파진단기는 (주)삼성메디슨의 Accuvix XG이며, 중심주파수 3MHz의 위상배열(phased array) 프로브를 사용하여 20대 중반 건강한 남성 심장의 aortic valve 부근에서 기저대역 도플러 신호 데이터를 획득하였다. 이 데이터를 원본 데이터로 하고, 이것에서 매 100개 중 마지막 20개의 데이터를 0으로 치환하여 갭이 있는 도플러 신호를 만들었다. 이 논문에서 일례로 나타내는 도플러 영상은 모두 갭과 실제 데이터를 합하여 1900개의 데이터로 영상을 구성하였다.
3.2 개선안 : 다중대역 미러링
기존 미러링 기반 갭 필링의 그러한 문제점을 줄이기 위하여 다음과 같은 개선안을 제안한다: 도플러 신호를 N개의 부대역(sub-band)로 나누어 각 부대역 내의 신호들의 주파수 차이를 줄여주고, 이 각각의 부대역에 대해 미러링 기반의 갭 필링을 해서 미러링의 오차를 줄인 다음, 각 부대역에서 갭 필링된 신호를 모두 더하도록 한다. 이 때, N개의 필터의 주파수응답을 모두 더한 경우 평탄한 주파수특성을 갖도록 해 주어야 한다. 그 뿐 아니라, 각 부대역의 주파수별 위상 지연이 동일하여야 필터링된 부대역 신호를 모두 더한 결과 신호가 평탄한 주파수특성을 가지게 된다. 따라서 필터는 FIR(Finite Impulse Response) 필터로 구성하였다. N을 증가시킬수록 미러링의 오차는 줄어들게 되나 계산량 등을 고려, 적절한 필터 차수 및 N을 선택할 필요가 있고, 여기서는10차, 또 N=4로 두었다.
3.3 시뮬레이션 및 실험
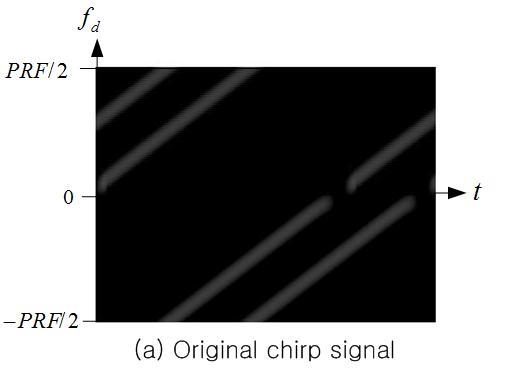
다음과 같은 단순한 조건으로 신호를 만들어 컴퓨터 시뮬레이션으로 기존 갭 필링 방법과 제안된 갭 필링 방법의 성능을 비교하였다: 클러터 신호는 이상적으로 제거된 것으로 가정하고, 혈류신호는 대역폭이 넓은 경우를 고려하기 위해 두 복소 쳐프(complex chirp) 신호의 합으로 모델하였는데, 두 쳐프 신호간의 정규화된 주파수(normalized frequency, ![]() ) 차이는
) 차이는 ![]() 이다. 즉,
이다. 즉,
 (6)
(6)
여기서 %는 modulo 연산자이다. 또, ![]() ,
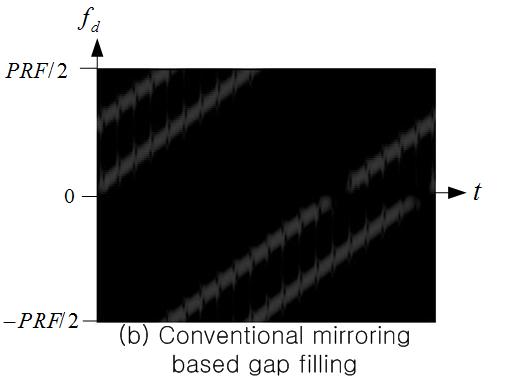
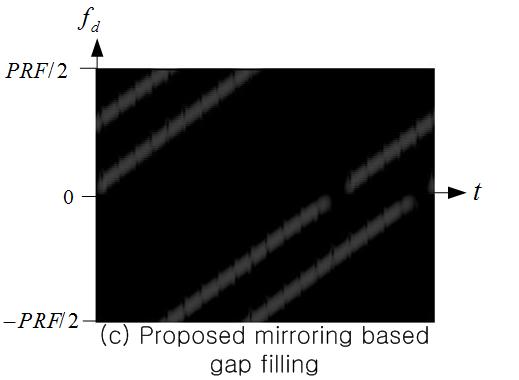
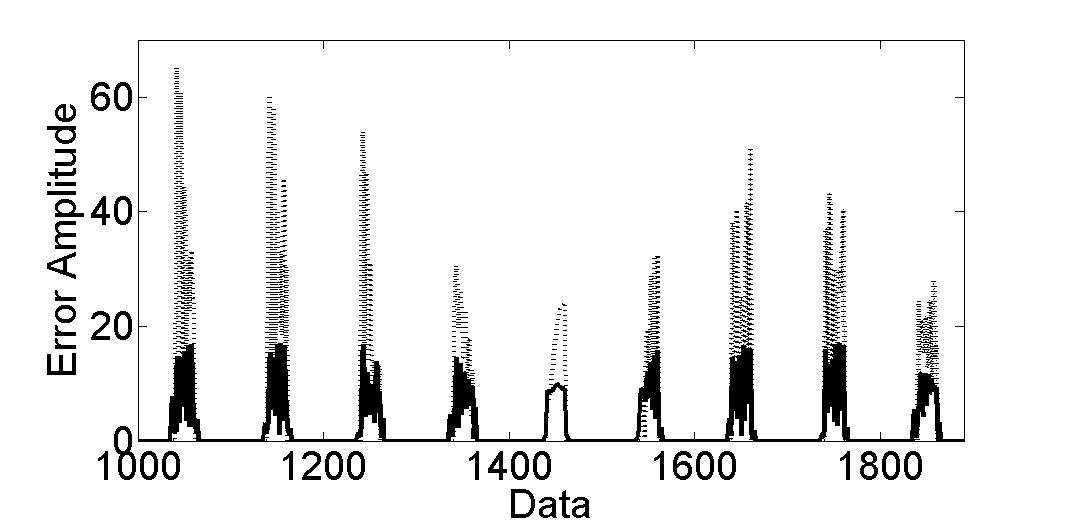
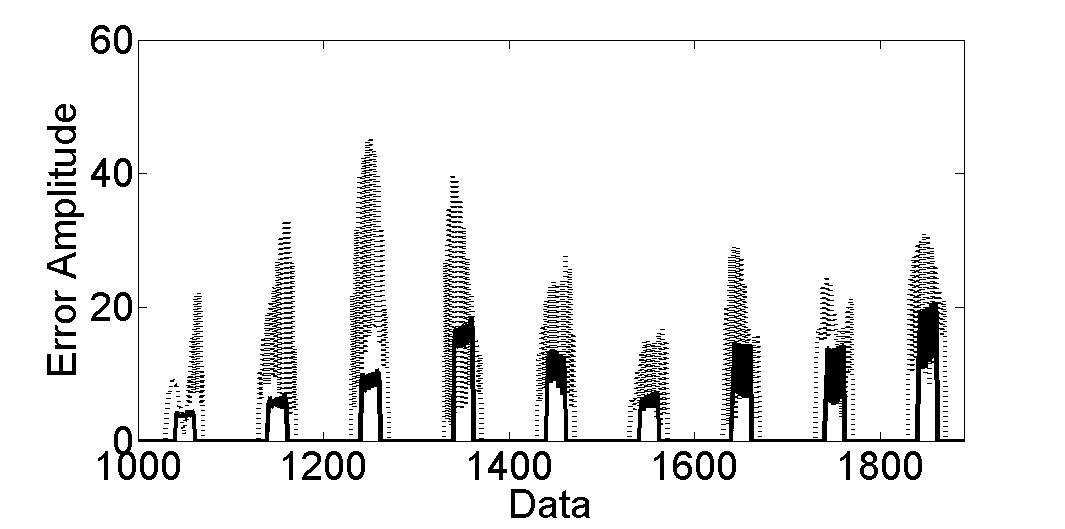
, ![]() 이다. 즉, 쳐프 신호 중 100개 중 마지막 20개의 연속한 데이터를 갭으로 간주하였다. 그림 2에 (a)갭이 없는 원본 데이터, (b)기존의 단순한 미러링 기반의 갭 필링, 또 (c)제안된 다중대역 미러링을 사용한 갭 필링으로부터의 신호로 구성한 도플러 스펙트럼 영상을 비교하였다. (b)에서 종종 관찰되던 아티팩트가 (c)에서 상당부분 사라졌음을 알 수 있다. 그림 2의 (a)를 기준으로 한 (b) 및 (c)의 갭 필링 데이터들의 오차의 절대값을 그림 3에 그래프로 나타내었다. 이 그래프들은 그림 2의 영상의 우측 절반에 해당한다.
이다. 즉, 쳐프 신호 중 100개 중 마지막 20개의 연속한 데이터를 갭으로 간주하였다. 그림 2에 (a)갭이 없는 원본 데이터, (b)기존의 단순한 미러링 기반의 갭 필링, 또 (c)제안된 다중대역 미러링을 사용한 갭 필링으로부터의 신호로 구성한 도플러 스펙트럼 영상을 비교하였다. (b)에서 종종 관찰되던 아티팩트가 (c)에서 상당부분 사라졌음을 알 수 있다. 그림 2의 (a)를 기준으로 한 (b) 및 (c)의 갭 필링 데이터들의 오차의 절대값을 그림 3에 그래프로 나타내었다. 이 그래프들은 그림 2의 영상의 우측 절반에 해당한다.
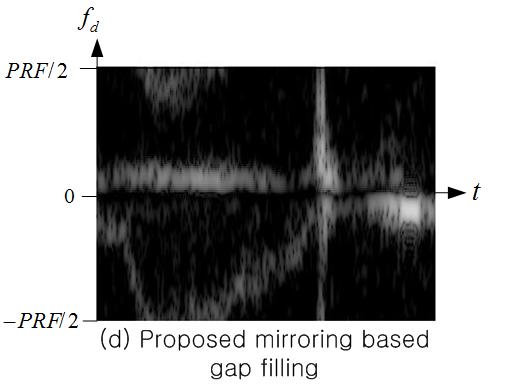
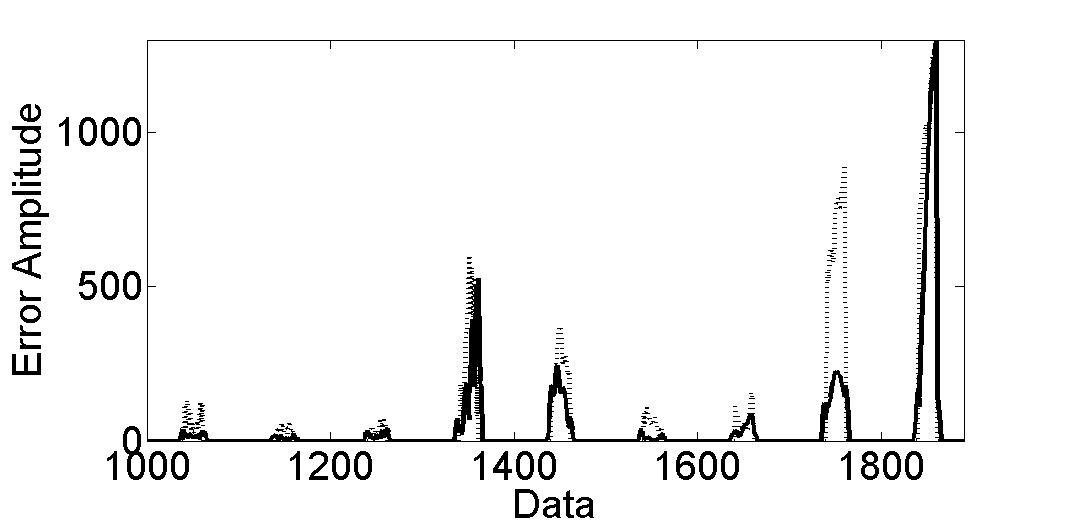
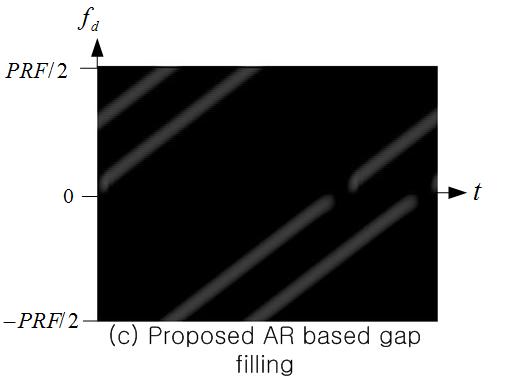
제안된 방법의 유효성은 그림 1에서 사용한 초음파진단기에서 인체로부터 얻은 펄스도플러 데이터를 써서도 검토되었다. 그림 1(d)는 제안된 다중대역 미러링을 사용한 갭 필링으로부터의 신호로 구성한 도플러 스펙트럼 영상이다. 기존 방법 1(c)에 비해 아티팩트가 현저히 줄어 제안된 방법의 유효성이 잘 나타나고 있다. 그림 4에 그림 3과 마찬가지로 그림 1(a)를 기준으로 한 (c) 및 (d)의 갭 필링 데이터들의 오차를 그래프로 나타내었다.
IV. 자기회귀(Autoregressive) 모델 기반의 갭 필링
4.1 배경
앞에서 살펴본 미러링 기반의 갭 필링 보다는 조금 더 복잡하고 성능도 더 좋아 보이지만 계산량이 그나마 많지 않아서 휴대용 초음파진단기에 적용 가능해 보이는 갭 필링 방법 중에는 자기회귀 모델을 이용한 것이 있다.[9]
신호 ![]() 에 대한 자기회귀 모델은 아래와 같은 수식으로 나타낼 수 있다:[15]
에 대한 자기회귀 모델은 아래와 같은 수식으로 나타낼 수 있다:[15]
![]() (7a)
(7a)
![]() (7b)
(7b)
이 때 p는 자기회귀 모델의 차수, ![]() 또는
또는 ![]() 는 모델 파라미터이고,
는 모델 파라미터이고, ![]() 이다. 이 때 위 첨자 f는 순방향을 나타내고, b는 역방향을 나타낸다.
이다. 이 때 위 첨자 f는 순방향을 나타내고, b는 역방향을 나타낸다. ![]() 은 순방향 예측오차,
은 순방향 예측오차,![]() 은 역방향 예측오차이고, 적절한 조건을 만족하는 경우 이것들은 백색잡음이다.
은 역방향 예측오차이고, 적절한 조건을 만족하는 경우 이것들은 백색잡음이다.
자기회귀 모델을 나타내는 파라미터는 ![]() 대신 반사계수
대신 반사계수 ![]() 를 쓰기도 하는데,
를 쓰기도 하는데, ![]() ,
, ![]() 이다. 또 반사계수와 예측오차와의 관계는 아래의 수식으로 나타내어진다:
이다. 또 반사계수와 예측오차와의 관계는 아래의 수식으로 나타내어진다:
![]() (8a)
(8a)
![]() (8b)
(8b)
모델 파라미터 또는 반사계수를 추정하는 여러 가지 알고리즘이 있으나 여기에서는 matlab의 ar_burg 함수를 사용하였다. 이 함수는 Burg의 격자 기반 알고리즘을 사용하고 있다.
[9]를 간략히 요약하자면 다음과 같다: 갭 직전 일정 길이의 데이터로부터 자기회귀 모델 파라미터 ![]() 및 예측오차의 표준편차를 구한다. 이를 각각
및 예측오차의 표준편차를 구한다. 이를 각각 ![]() ,
, ![]() 라 하자. 또 갭 직후 일정 길이의 데이터로부터도 별도로 모델 파라미터
라 하자. 또 갭 직후 일정 길이의 데이터로부터도 별도로 모델 파라미터 ![]() 및 예측오차의 표준편차를 구한다. 이를 각각
및 예측오차의 표준편차를 구한다. 이를 각각 ![]() ,
, ![]() 라 하자. 다음, 이들을 적절히 섞는다: 예컨대
라 하자. 다음, 이들을 적절히 섞는다: 예컨대 ![]() ,
, ![]() 이다. 다음, 표준편차가
이다. 다음, 표준편차가 ![]() 인 백색 가우시안 랜덤 잡음을 만들고,
인 백색 가우시안 랜덤 잡음을 만들고, ![]() 로부터
로부터 ![]() 를 구한 다음, 이 잡음과
를 구한 다음, 이 잡음과 ![]() 를 식(7), (8)에 대입해서 갭을 채울 데이터를 만들어 낸다. 만들어 내는 데이터의 길이는 갭의 길이보다 넉넉히 만들어 갭 전후의 원래 데이터와 교차 페이드한다. 만들어 낸 데이터의 스펙트럼은 갭 전과 후의 신호의 자기회귀 모델을 사용하여 만들었으므로 그 신호들의 스펙트럼을 닮게 되어 있다.
를 식(7), (8)에 대입해서 갭을 채울 데이터를 만들어 낸다. 만들어 내는 데이터의 길이는 갭의 길이보다 넉넉히 만들어 갭 전후의 원래 데이터와 교차 페이드한다. 만들어 낸 데이터의 스펙트럼은 갭 전과 후의 신호의 자기회귀 모델을 사용하여 만들었으므로 그 신호들의 스펙트럼을 닮게 되어 있다.
4.2 개선안
기존 방법보다 원래 데이터에 더욱 유사한 데이터를 만들 수 있도록 개선하기 위해 제안하는 방법은 다음과 같다: 자기회귀 모델의 기본적 정의에 의해, 주어진 신호 ![]() ,
, ![]() 로부터 추정된 자기회귀 파라미터 및 추정된 백색잡음의 분산 등을 사용하면 식(7)와 같이 주어진 신호 범위 바깥의 신호, 즉
로부터 추정된 자기회귀 파라미터 및 추정된 백색잡음의 분산 등을 사용하면 식(7)와 같이 주어진 신호 범위 바깥의 신호, 즉 ![]() ,
, ![]() 들을 외삽할 수 있다. 따라서, 갭 직전 신호들로부터 추정된 자기회귀 모델을 써서 외삽함으로써 갭 내부 신호를 만들 수 있다. 다음, 갭 직후의 신호들을 역방향으로 배치한 후 이들로부터 추정된 자기회귀 파라미터를 써서 외삽하면 역방향으로 외삽한 별도의 갭 내부 신호를 만들 수 있다. 이렇게 새로이 만들어 진 두 신호를 교차 페이드함으로써 갭 필링을 수행할 수 있다.
들을 외삽할 수 있다. 따라서, 갭 직전 신호들로부터 추정된 자기회귀 모델을 써서 외삽함으로써 갭 내부 신호를 만들 수 있다. 다음, 갭 직후의 신호들을 역방향으로 배치한 후 이들로부터 추정된 자기회귀 파라미터를 써서 외삽하면 역방향으로 외삽한 별도의 갭 내부 신호를 만들 수 있다. 이렇게 새로이 만들어 진 두 신호를 교차 페이드함으로써 갭 필링을 수행할 수 있다.
제안된 방법과 [9]의 차이점은 다음과 같다: 첫째, 제안된 방법은 갭 외부에서는 어떠한 교차 페이드도 사용하지 않고 원래의 데이터를 그대로 사용하며, 따라서 갭의 시작부분에서는 매우 자연스럽게 원래의 데이터와 연결되고, 갭 내부에서 한 번만 교차 페이드한다. 반면에 기존 방법은 갭의 전과 후에서 각각 교차 페이드하고 있다. 따라서 제안된 방법에 비해 기존 방법은 보다 더 넓은 범위에서 원래의 데이터에 인공적 데이터를 섞고 있다. 따라서 원래 데이터에 대해 오차를 가지는 구간이 더 길게 되며 결과 스펙트럼도 더 많은 오차를 가지게 된다. 둘째, 갭 부근에서 스펙트럼 중심주파수가 변화할 경우를 고려하자. 기존 방법은 갭 필링할 데이터를 만들 때 갭 전과 후의 자기회귀 모델 정보를 평균하였고, 따라서 새로이 만들어낸 갭 내부 데이터의 스펙트럼은 시간적으로 일정하다. 그러나, 제안된 방법은 갭 전과 후는 독자적으로 외삽하였으므로 각 부분의 스펙트럼을 각각 반영하고 있고, 이것이 교차 페이드되므로 결과적으로 갭 필링된 전체 데이터의 스펙트럼이 시간적으로 더 부드럽게 변화하는 모양을 가지게 된다. 다만, 제안된 방법은 자기회귀모델로 외삽하는 과정을 갭 전, 후에서 두 번 수행해야 하므로 계산량이 [9]에 비해 늘어난다.
4.3 시뮬레이션 및 실험
실험조건, 가정, 사용한 데이터 등은 미러링 기반 갭 필링의 경우와 동일하다. 모든 경우에 AR의 차수는 20으로 두었고, AR 파라미터를 구하기 위한 데이터의 길이는 40으로 두었다. AR의 차수를 줄일수록 계산량이 적어져 유리한 반면 갭 필링된 신호의 스펙트럼이 흐려져서 원본 신호에 대한 오차가 커지게 되고, AR 차수를 늘리게 되면 계산량이 늘어나는 반면 스펙트럼이 흐려지지는 않지만 혈류의 시간에 따른 변화를 잘 반영하지 못해 오차가 커지게 된다. 우리의 실험에서는 약 20차 정도가 적절하다고 보였다. 몇몇 차수에 따른 원본 데이터를 기준으로 한 갭 구간에서의 갭 필링된 데이터의 오차의 rms (root-mean-square) 값을 표 1에 나타내었다. 이 때의 오차는 인체로부터의 데이터를 사용하여 구하였는데, 영상으로 나타낸 부분만이 아니라, 인체 심장 여러 부위에서 얻은 도합 16000 샘플의 데이터들을 모두 사용하였다.
표 1. 차수에 따른 갭 필링 데이터 오차 비교 Table 1. Comparison of gap filling data errors along AR order. | |||
방법 차수 | 10 | 20 | 30 |
기존 | 1579 | 1420 | 1602 |
제안 | 339 | 271 | 320 |
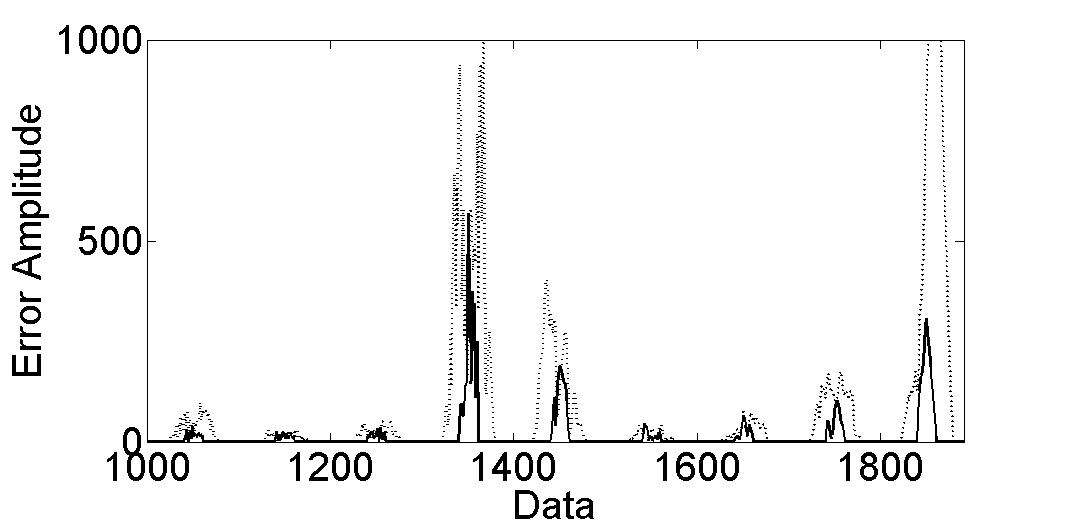
복소 쳐프 신호에 대해 원본 데이터, 또 두 가지 방법으로 갭 필링한 데이터들의 스펙트럼을 그림 5에서 비교하였다. 예상대로, 제안된 방법이 보다 원본에 가깝게 부드러운 주파수 변화를 보이고 있다. 같은 방법으로 인체 데이터의 스펙트럼을 그림 6에서 비교했다. 제안된 방법이 원본 영상과의 차이가 보다 적음을 알 수 있다. 또, 그림 7에는 그림 3과 마찬가지로 그림 5의 (a)를 기준으로 한 (b)와 (c)의 갭 필링 데이터의 오차의 절대값을 그래프로 나타내었다. 그림 8에도 마찬가지로 그림 6의 (a)를 기준으로 한 (b)와 (c)의 오차의 절대값을 그래프로 나타내었다. 예상대로, 제안된 방법에서, 오차의 진폭 및 오차가 나타나는 구간이 더 작고 좁음을 알 수 있다.
V. 계산량 및 오차 비교
지금까지의 simulation 및 실험에서의 알고리즘들은 matlab으로 코딩하여 PC에서 수행시켰다. 이 때의 수행시간을 각 알고리즘별로 산출, 비교하였다. 16000 샘플의 도플러 기저대역 복소데이터를 처리하여 스펙트럼 데이터를 산출하는 데 걸리는 시간을 matlab의 tic 및 toc 함수로 초 단위로 측정하였다. 그 결과를 표 1에 정리하였다. 여기서, 방법 중 ‘기본’은 갭 필링이 없는 원본 데이터를 처리하는 경우를 말한다. 표에서 나타낸 대로, 제안된 방법들은 계산시간이 기본 방법에 비해 각각 약 1.15배(미러링 기반), 또는 1.34배(AR 모델 기반) 증가하였다. 각 방법에서의 원본 데이터를 기준으로 한 갭 구간에서의 갭 필링된 데이터의 오차의 rms(root-mean-square)값도 표 2에 함께 나타내었다. 이 때도 표 1과 마찬가지로 인체 심장 여러 부위에서 얻은 도합 16000 샘플의 데이터들을 모두 사용하였다.
