

I. 서 론
수동 소나 시스템에서 음원 깊이 추정 분야는 표적 식별, 추적 등 다양한 전술에 활용할 수 있기 때문에 수 십 년 동안 진행되어 왔고, 지금도 많은 연구가 진행되고 있는 분야이다.[1,2,3,4,5] 연구가 지속적으로 진행되고 있는 이유 중 하나는 표적의 깊이 추정을 통해 잠수함인지 수상함인지 식별이 가능하고 나아가 표적의 위치추정에도 사용될 수 있기 때문이다.
본 논문은 수동 소나 시스템에서 표적으로 부터 발생되는 소음 (또는 신호)을 수직 선배열 센서를 이용하여 수신하고, 수신된 신호의 채널 임펄스 응답을 추정한다. 채널 임펄스 응답을 추정하는 기법으로 음선 기반 블라인드 디콘볼루션(Ray-based Blind Deconvolution, RBD)[5,6]을 이용되며, 채널 임펄스 응답의 패턴을 통해 음원깊이를 추정한다.
기존의 발표된 논문[1]은 채널 임펄스 응답의 패턴을 통해 음원이 해수면에 있는 표적인지 해수면 아래에 있는 표적인지만을 구분해주는데 목표가 있었다. 깊이 추정이 아닌 구분 알고리즘인 이유는 채널 임펄스 응답의 패턴에서 깊이를 나타내는 교차점이 두 깊이에서 나타나기 때문에 깊이 추정을 하는데 모호성이 발생하기 때문이다.
본 논문은 기존 논문의 문제점이었던 깊이 추정의 모호성을 제거하여 표적의 깊이 구분 알고리즘이 아닌 표적의 깊이 추정 알고리즘을 제시한다. 모호성은 해수면과 해저면의 반사계수의 특성을 이용하여 채널 임펄스 응답의 위상을 통해 제거한다.
본 논문의 구성은 다음과 같다. II장에서는 본 논문의 알고리즘을 설명하는 배경 이론에 대하여 설명하고, III장에서는 배경 이론을 이용하여 음원 깊이추정 알고리즘을 설명한다. IV장에서는 알고리즘을 검증하기 위하여 시뮬레이션을 수행한 결과에 대하여 설명하고, 마지막으로 V장에서는 본 논문의 결론을 맺는다.
II. 배경이론
2.1 반사계수
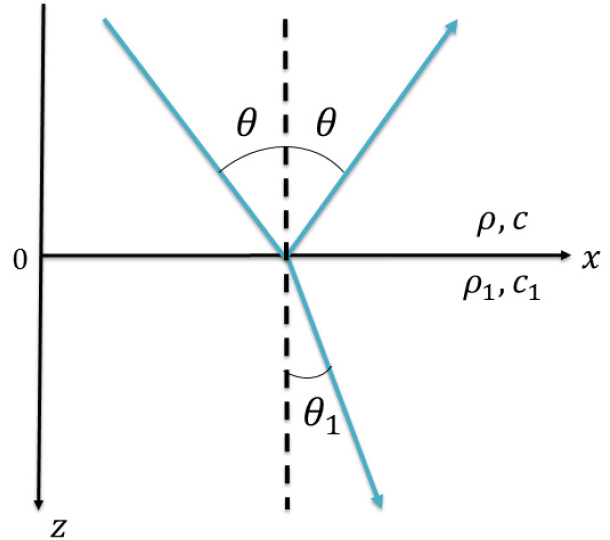
밀도와 음속이 다른 두 매질에 음파가 입사될 때 Fig. 1과 같이 음파의 반사와 투과가 나타난다. 반사계수는 입사하는 음파의 세기와 반사되는 음파의 세기의 비로 표현되며, Rayleigh에 의하여 다음과 같은 수식으로 표현된다.
Eq. (1)에서 는 입사각, 은 투과된 각을 의미하고, 은 로 밀도 와 의 비이며, 은 으로 음속 와 의 비로 계산된다.
이 실수이고, 그리고 인 경우에 반사계수는 다음과 같은 수식으로 표현될 수 있다.[7]
는 해수면 혹은 해저면에 반사되는 입사각과 반사각 사이의 위상 천이를 나타낸다.
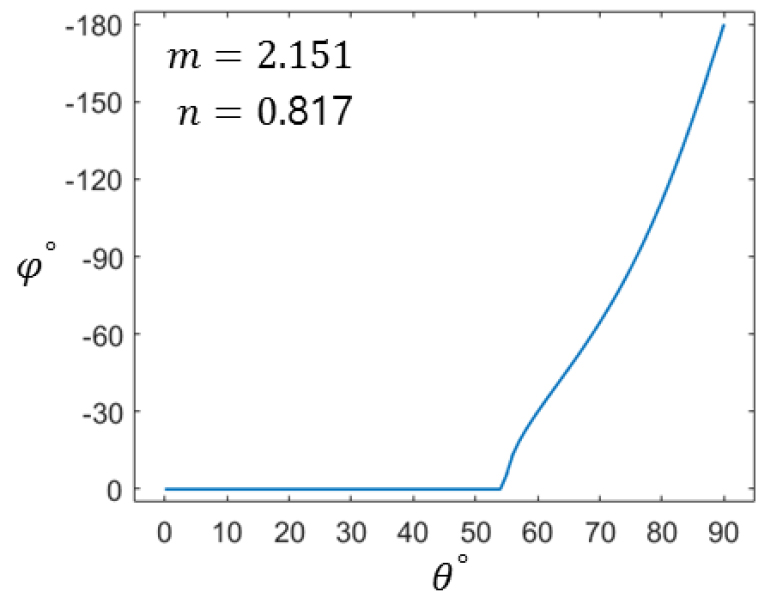
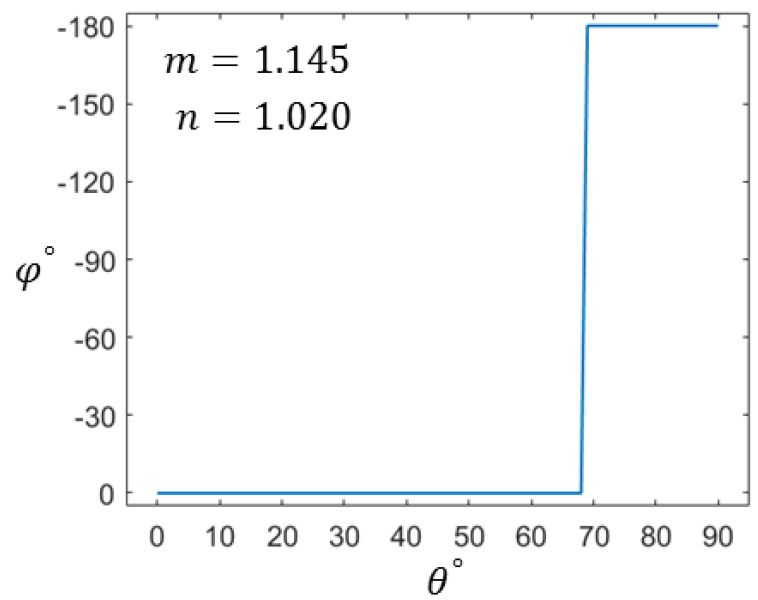
Fig. 2는 Eq. (3)에 의해 값이 2.151이고, 값이 0.817인 모래 해저질에서 나타나는 입사각과 반사각의 위상 천이를 나타낸다. 그리고 Fig. 3은 값이 1.145이고, 값이 1.020인 점토와 실트 해저질에서 나타나는 입사각과 반사각의 위상 천이를 나타낸다.
2.2 음선 기반 블라인드 디콘볼루션
선배열 센서를 사용하는 수동 소나 시스템에서 수신신호만을 이용하여 채널 임펄스 응답을 추정할 수 있는 RBD 기법을 Sabra et al.가 제안하였다.[5,6] 위 기법은 환경 및 송신신호에 대한 정보 없이 수신신호만으로 Channel Impulse Response(CIR)을 추정하기 때문에 수동 소나 시스템에서 유용하게 사용되는 기법이다.
Eq. (4)에서 는 번째의 수신기에 수신된 신호이며 는 채널 임펄스 응답, 는 송신신호를 뜻하며, 수신신호는 임펄스함수와 송신신호의 콘볼루션(, convolution)으로 계산된다.
Eq. (5)에서 , 는 각각 , 의 스펙트럼, , 는 각각 송신기와 번째 수신기의 위치벡터를 나타낸다. 그리고 는 송신기와 번째 수신기 사이의 전달함수를 나타내며, 수신신호의 스펙트럼은 전달함수와 송신신호의 곱으로 계산된다.
Eq. (5)의 송신 신호의 스펙트럼 는 Eq. (6)와 같이 송신신호의 세기를 나타내는 와 위상을 나타내는 로 분리할 수 있다.
Eq. (6)에서 만을 추출해 내기 위해서 송신신호 스펙트럼의 크기를 소거해야 하며, 이를 위해 수신신호 정규화가 필요하다.
각 센서에 수신되는 신호의 파워가 일정하다는 가정 하에 Eq. (7)와 같이 표현할 수 있으며, 는 수신신호의 정규화된, 스펙트럼을 의미한다.
Eq. (7)에서 를 약분하게 되면 Eq. (8)와 같이 전달함수와 송신신호의 위상 부분만 남게 되며 위상 보정 인자를 통하여 송신신호의 위상 부분을 보정하면 전달함수를 추정할 수 있다.
Sabra et al.의 논문에 따라 음선 정보를 이용하여 위상 부분을 보정하면 최종적으로 추정된 전달함수는 Eq. (8)의 마지막 수식과 같이 표현할 수 있으며 임의의 시간지연이 적용된 형식으로 표현되어 진다.
본 논문에서는 채널 임펄스 응답의 음파 도달 시간 패턴을 추정하는 것이 목적이므로 에 해당하는 임의의 시간 지연은 무시할 수 있다. 그리고 역 푸리에 변환을 통하여 계산하면 임의의 시간 지연이 적용된 시간 영역 임펄스 응답으로 표현할 수 있다.
III. 음원 깊이 추정 알고리즘
해수면이 비교적 평탄한 해양도파관에서 음원으로부터 수신기로 음파가 전달될 때 해수면, 해저면 반사에 의한 다중 경로로 음파가 수신되어진다. 이러한 반사파들에 의해 생성된 채널은 일정한 패턴을 보이며, 패턴 분석을 통해 음원의 수심을 추정할 수 있다.
해수면-해저면 반사파와 해저면-해수면 반사파를 나타내면 아이코널 방정식에 의해 Eqs. (9)와 (10)과 같이 표현할 수 있다.[8]
는 해수면 – 해저면, 해저면 – 해수면 반사에 해당하는 음선의 이동거리를 의미하고, , 는 각 음선이 이동한 총 시간을 나타낸다. Eq. (11)은 두 음선의 도달 시간 차이를 의미한다.
이상적인 해양도파관에서 다중경로에 의한 송신기와 수신기 간의 음선 이동은 Fig. 4와 같이 나타내며 해수면-해저면, 해저면-해수면 반사에 대한 경로 예시가 표현되어 있다.
는 Eq. (12)을 통하여 계산되고, 는 Eq. (13)을 통하여 계산된다. 는 해양도파관의 깊이를 의미한다.
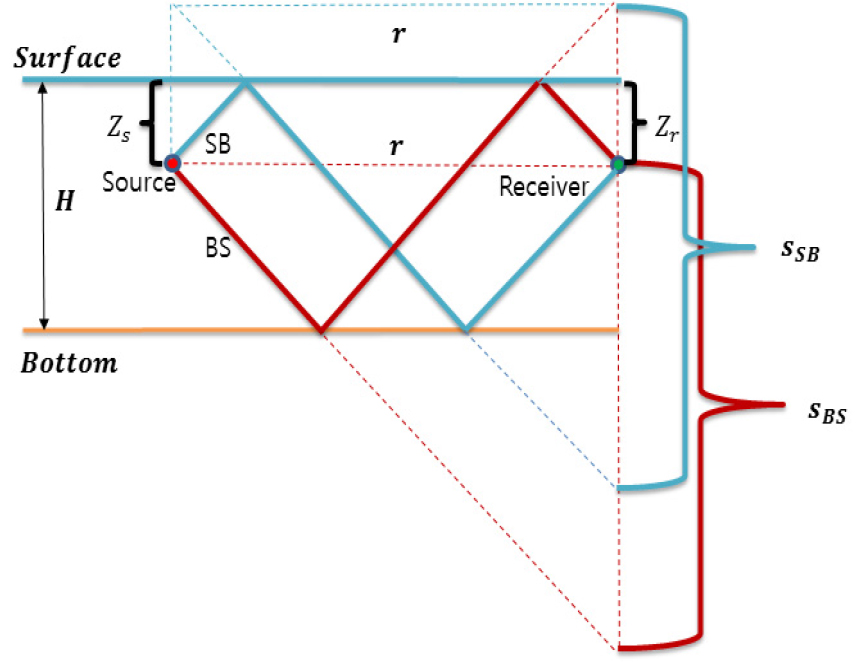
Eqs. (12)와 (13)에서 근사항으로 표현된 부분은 음원의 깊이와 수신기의 깊이 차이()가 0일 경우이며, 이때 해수면-해저면 반사파와 해저면-해수면 반사파의 경로 길이가 같다.
채널 임펄스 응답의 패턴은 다중 경로에 의한 상대적 도달 시간에 의해 결정되며, 두 경로의 도달 시간 차이가 0이라는 것은 채널 임펄스 응답에서 서로 교차함을 의미한다. 따라서 채널 임펄스 응답의 교차점이 음원의 깊이로 추정할 수 있다.
하지만 채널 임펄스 응답의 교차점이 Fig. 5와 같이 F점과 I점에서 나타나기 때문에 음원의 깊이를 추정하는데 모호성이 발생하며, 이를 제거하기 위해 다음과 같이 해수면과 해저면의 반사로 인한 위상차이의 특성을 이용한다. 해수면에서는 해수와 공기의 임퍼던스 차이가 크기 때문에 반사계수는 –1에 가깝고, 해수면이 잔잔한 경우에 전반사가 일어나 에 가까운 위상 천이가 나타난다. 그리고 해저면에서는 Eq. (3)의 해저면의 특성과 입사각에 따라 위상 천이가 발생한다.
음원 A에서 발생하는 음파의 위상을 Fig. 5와 같이 라고 가정하면 해수면 B에 반사된 음파는 위상 천이에 의해 가 되고, 해저면 C에 반사된 음파는 입사각도에 따라 로 위상 천이가 나타난다. 그리고 C점에서 반사된 음파는 다시 해수면 F에 반사되어 만큼의 위상천이가 나타나고, B점에서 반사된 음파는 해저면 E에 반사되어 와 같이 위상 천이가 발생한다.
채널 임펄스 응답은 위와 같은 위상 천이의 패턴을 갖고 형성되며, 이러한 패턴을 이용하여 다음과 같이 깊이 추정의 모호성을 제거할 수 있다.
음원의 깊이가 아닌 모호성이 나타나는 I점에서는 의 위상을 갖는 임펄스 응답과 의 위상을 갖는 임펄스 응답이 교차하며 둘은 만큼의 위상 차이를 갖는다. 음파의 입사각()이 작을수록 값이 작아지기 때문에 다중반사가 많이 나타나는 천해환경에서는 Eq. (3)에 따라 입사각이 작아져 의 값은 작아지고, 위상 차이의 값은 에 가까워진다. 이 와 같은 특성은 Fig. 2와 같이 모래로 이루어진 해저면의 경우 잘 나타난다.
음원의 깊이를 나타내는 F점에서는 과 의 의 차이의 위상을 갖는 임펄스 응답이 교차점을 형성하며, 입사각의 차이가 크지 않기 때문에 Eq. (3)에 따라 그 값이 작게 나타난다. 따라서 반사되는 임펄스 응답의 패턴을 비교해보았을 때 위상의 차이가 거의 나타나지 않는 임펄스 응답의 패턴이 만나는 교차점의 깊이가 음원의 깊이임을 알 수 있다. 하지만 Fig. 3과 같이 점토로 이루어진 해저면의 경우 해저면 반사파의 입사각 70도 이상에서 위상 천이 가 만큼 나타기 때문에 I점에서의 해수면 반사파와 해저면 반사파의 위상차이 가 0으로 계산된다. 따라서 점토질의 해저면의 경우 해저면 반사파의 입사각이 70도 이상의 경우 F점과 I점에서의 위상 차이가 나타나지 않기 때문에 모호성 제거가 어렵다.
IV. 시뮬레이션 및 결과
본 장에서는 음원 깊이 추정에 대한 시뮬레이션을 수행하였다. 시뮬레이션 환경은 Shallow Water Acoustic Variability EXperiment 2015(SAVEX15)의 시험과 동일하게 설정하였으며,[9] 구성은 Fig. 6과 같이 해저면이 모래이고, 수심 100 m, 음원 깊이 30 m, 음원과 수신기 배열 사이의 거리는 3000 m이다.
시뮬레이션은 음파 전달 모델인 BELLHOP을 사용하여 수행하였고, 거리-독립 환경을 고려하였다. 시뮬레이션을 위한 송신신호의 정보는 Hanning window가 적용된 1 s 길이의 신호이고 주파수는 400 Hz ~ 600 Hz 밴드의 Chirp 신호로 설계하였다.
Fig. 7의 Y축은 BELLHOP에서 설정한 수신기의 번호이며 수심 0 m에 있는 수신기부터 번호를 부여하여 2 m 간격으로 100 m 까지 총 51개를 형성하였다. 시뮬레이션 환경을 거리 3000 m로 설정하였기 때문에 대략 2초부터 수신신호가 측정됨을 볼 수 있다.
Fig. 8은 해당 주파수 대역에 해당하는 빔 출력을 나타내며, 설정한 배열 간격으로 인하여 여러 빔 각도에 해당하는 공간 에일리어싱이 발생한다. 하지만 주파수에 대해 비상관 합산 처리를 통하여 에너지가 높은 빔 각도를 Fig. 9와 같이 나타낼 수 있고,[9] 빨간색 선이 나타내는 것은 RBD에 사용된 음선의 입사각을 나타낸다.
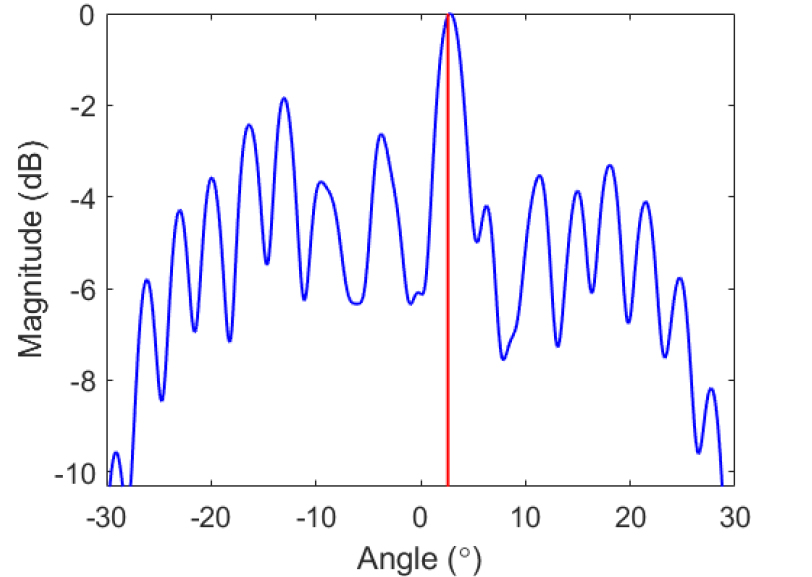
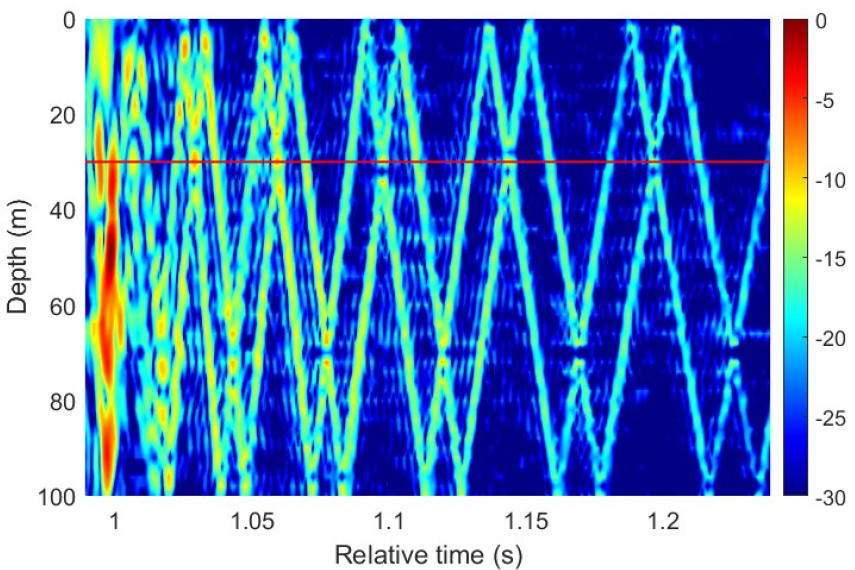
출력된 각도는 Fig. 9에서 보는 것과 같이 2.6이며, 이 각도를 이용하여 위상 보정 인자를 계산한다. 이를 이용하여 Eq. (8)을 계산하게 되면 Fig. 10과 같이 채널 임펄스 응답을 계산할 수 있다. 빨간색 선은 30 m의 깊이를 나타내는 지표이며, 결과에서 볼 수 있듯이 음원의 깊이와 동일한 깊이에서 교차점이 형성됨을 볼 수 있다. 하지만 Fig. 8에서 볼 수 있듯이 교차점이 30 m 지점에서 나타나지만 70 m에서도 교차점이 발생하기 때문에 해수면에 있는 음원이 30 m에 존재하는지 70 m에 존재하는지 깊이 추정에 대한 모호성이 발생한다.
모호성을 제거하기 위해 Fig. 11과 같이 채널 임펄스 응답의 교차점이 나타나는 A와 B부분을 확인하여 III장에서 언급하였던 임펄스 응답의 위상의 차이를 이용하면 모호성을 제거할 수 있다.
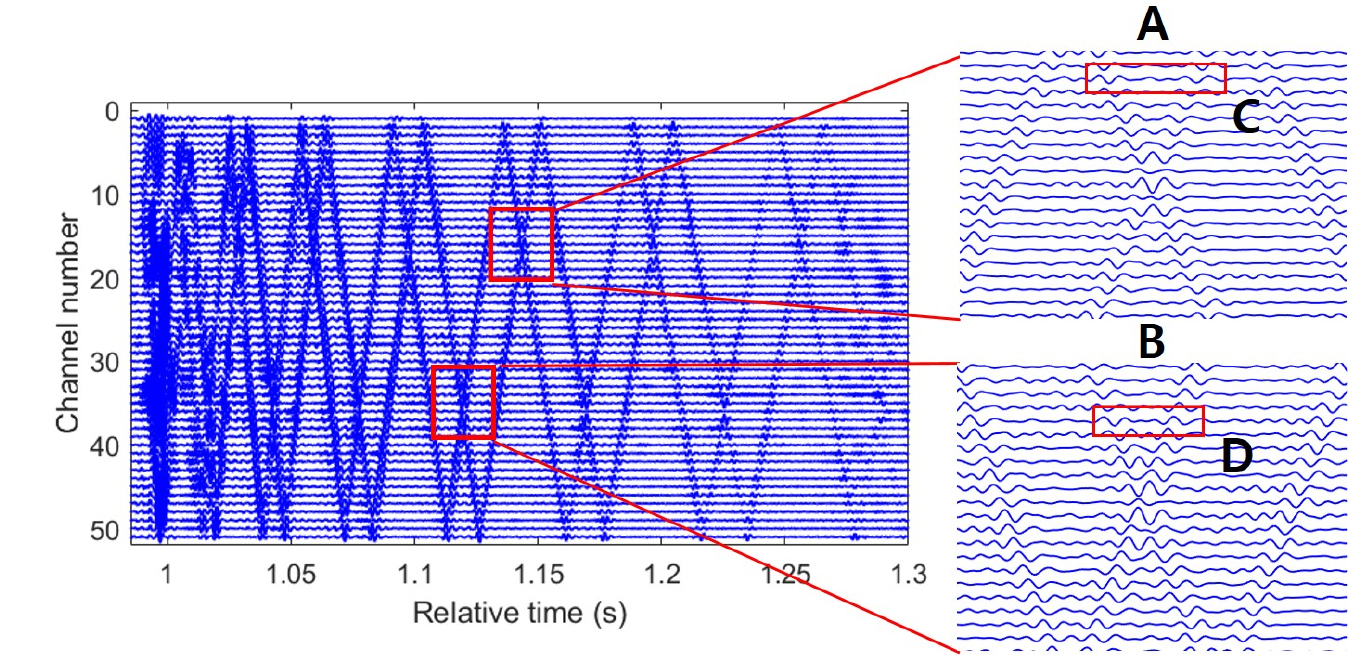
30 m 깊이의 A 부분은 해수면에 반사된 채널 임펄스 응답의 위상과 해저면에 반사된 채널 임펄스 응답의 위상 차이가 작게 나타나며, 따라서 30 m 지점이 음원의 깊이임을 추정할 수 있다. 그리고 70 m 깊이의 B 부분에서는 해수면과 해저면에 반사된 채널 임펄스의 위상차이가 크게 나타남을 확인할 수 있고. 따라서 70 m 깊이의 교차점은 음원추정에 있어서 모호성을 나타내는 부분이라고 추정할 수 있다.
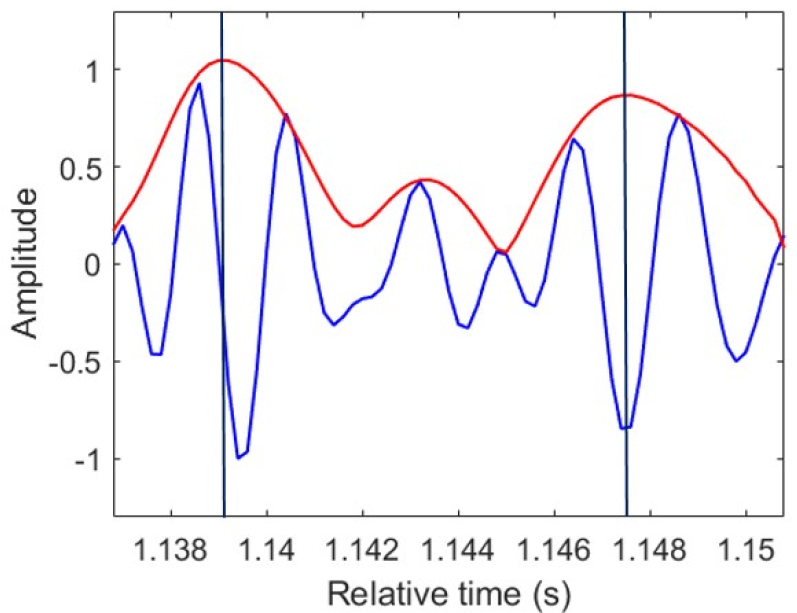
해수면 그리고 해저면에 반사된 채널 임펄스 응답의 위상 차이를 비교하기 위해 다음의 과정을 수행하였다. 첫 번째, Fig. 11의 C와 D처럼 교차점에서의 해수면 반사파의 위상과 해저면 반사파의 위상을 확인할 수 있도록 두 채널 임펄스 응답의 시작점과 끝점을 시간영역에서 추출한다. 두 번째, 채널 임펄스 응답의 최대값과 최소값이 +1과 –1이 되도록 정규화를 수행한다. 세 번째, 정규화된 두 채널 임펄스 응답의 포락선을 검출한다. 네 번째, 검출된 두 포락선의 진폭 값 중 최고값을 계산하고 최고 값이 나타난 시간을 추출한다. 다섯 번째, 추출한 시간에서의 채널 임펄스 응답의 중앙을 계산한다. 여섯 번째, 채널 임펄스 응답의 위상을 비교한다. Figs. 12와 13은 위의 과정을 수행한 결과이며, 파란 실선은 채널 임펄스 응답, 빨간 실선은 채널 임펄스 응답의 포락선, 검은 실선은 채널 임펄스 응답의 중앙을 나타낸다.
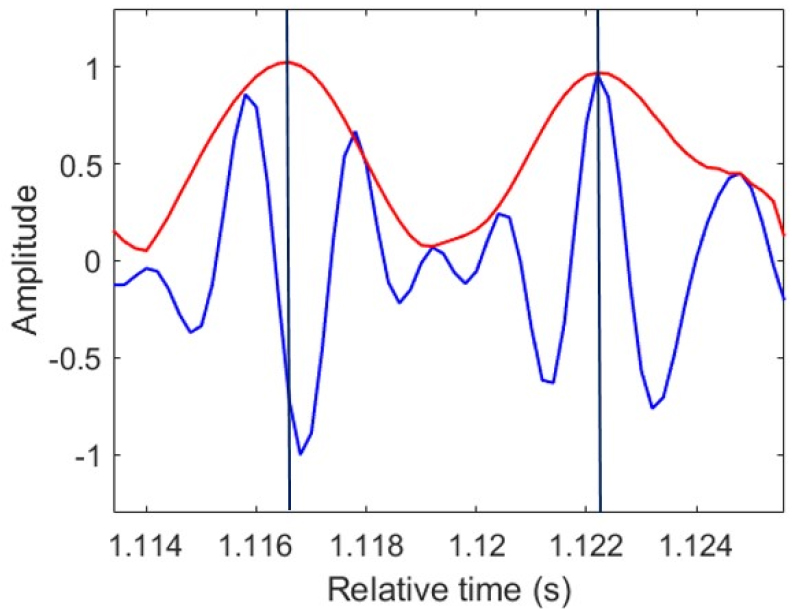
Fig. 12의 검은 실선으로 표시된 부분이 채널 임펄스 응답의 중앙이며, 실제 음원의 깊이가 존재하는 A 부분이기 때문에 두 채널 임펄스 응답의 중앙을 기준으로 비교해 보았을 때 위상 차이가 작다는 것을 확인할 수 있다. 그리고 Fig. 13의 검은 실선으로 표시된 채널 임펄스 응답의 중앙이며, 음원 깊이의 모호성이 존재하는 B 부분의 채널 임펄스 응답이기 때문에 두 채널 임펄스 응답의 중앙을 기준으로 비교해 보았을 때 위상 차이 약 만큼 나타나는 것을 볼 수 있다.
V. 결 론
본 논문은 수동 소나 시스템에서 채널 임펄스 응답을 이용하여 음원 깊이를 추정하는 알고리즘에 대해서 연구하였다. 채널 임펄스 응답은 RBD를 이용하여 추정되어졌고, 추정된 채널 임펄스 응답의 패턴에서 교차점은 음원의 깊이를 추정할 수 있는 단서가 되며, 이를 수식을 통하여 증명하였다. 하지만 채널 임펄스 응답의 교차점이 두 개의 깊이에서 나타나기 때문에 표적의 수심을 추정하기 위해서 모호성을 제거해야 했다. 제거하는 방법은 해수면과 해저면의 반사계수의 특성으로 나타나는 위상의 차이를 이용한 제거 방법을 사용하였으며, 제거 후 하나의 표적의 깊이를 추정할 수 있었다. 그리고 알고리즘을 검증하기 위하여 음향 전파 모델인 BELLHOP을 이용하여 시뮬레이션 하였다.
본 논문의 음원 깊이 추정 알고리즘은 두 가지 장점을 갖는다. 첫 번째로 수동 소나 시스템에서 수신신호만을 이용하여 음원의 깊이를 추정할 수 있다는 것이며, 깊이 추정을 위해서 송신 신호와 해양 환경에 대한 정보는 필요하지 않다. 두 번째로 실시간으로 음원의 깊이를 추정 할 수 있을 정도로 연산량이 많지 않다. 하지만 본 논문의 알고리즘은 한계점이 있으며, 이를 해결하는 것이 향후 연구 과제이다. 첫 번째 한계점은 천해환경의 거리-독립 환경에서만 적용 가능한 것이다. 채널 임펄스 응답은 환경에 따른 다중경로에 의하여 패턴이 결정되기 때문에 심해 그리고 거리-종속 환경에서는 패턴을 통한 음원 깊이 추정이 어렵다. 두 번째는 RBD를 이용하여 수직 선배열 센서에서 채널 임펄스 응답을 추정 시 선배열 센서의 개구 내의 채널 임펄스 응답만을 추정할 수 있다. 따라서 선배열 센서 개구 외의 깊이에서의 표적 음원의 깊이 추정은 보외법을 사용하여야 한다. 세 번째는 점토 해저질의 경우 일정 각도 이상의 입사각에서는 음원 깊이 추정의 모호성 제거 기법을 적용할 수 없다는 것이다.
