I. 서 론
II. 시간 지연 신호의 수치 모형화
2.1 능동 소나에서 일반적인 시간 지연 신호 모델
2.2 능동 소나에서 두 개의 수신기를 사용한 시간 지연 추정 모델
III. 가중 딕션너리를 이용한 시간 추정
IV. 모의실험 결과
V. 결 론
I. 서 론
수중 음향 분야에서 시간 지연은 목표물의 위치 추정이나 방위 등을 추정할 수 있어서 오랫동안 연구되어온 분야이다. 그뿐만 아니라 로봇 공학 등에서도 목표물 위치 추정 문제나 추적에서 많이 쓰이고 있다.[1,2,3,4,5] 보통 능동 소나에서는 목표물과 소나 사이의 거리를 알기 위해서 표적에서 돌아오는 반사음의 도래 시간 추정을 사용한다. 거리가 탐지된 표적은 추적이 필요하게 되는데, 추적 정보 등을 구하기 위해서는 정확한 방위 정보도 함께 요구된다. 능동 소나에서는 보통 빔 형성기를 통하여 그 방향을 추정하고, 시간 지연은 주로 타겟의 거리를 추정하는 데 사용한다.[6] 그러나 미리 형성된 빔으로 방향을 추정할 경우 빔폭 만큼의 부정확한 영역이 생기게 된다. 따라서 소나의 응용에 따라서 이 빔폭을 이상의 정확도가 요구될 경우 이를 위한 방위 추정 방법이 요구된다.
본 논문에서는 능동 소나에서 하나의 채널을 사용해서 타겟의 거리를 추정하기 위해 주파수 영역에서 시간 지연 추정할 때 생기는 잡음 증폭 문제를 개선한 새로운 방법을 제안하고, 이를 표적 추적 등에 사용하기 위해 두 개의 수신기를 사용한 시간 지연 추정 방법을 제안한다. 또 모의실험을 통해서 제안한 방법이 잡음에 대한 영향을 덜 받음을 보인다.
본 논문의 구성은 2장에서 시간 지연 현상을 수치 모델화하고, 3장에서 주파수 영역에서 시간 지연 추정을 할 수 있는 새로운 알고리즘을 제안한다. 4장에서 제안한 알고리즘의 성능을 비교실험하고, 5장에서 결론으로 요약한다.
II. 시간 지연 신호의 수치 모형화
이 장에서는 능동 소나에서 일반적으로 고려하는 시간 지연 신호 모델을 알아보고 이 모델을 두 개의 수신기가 있는 경우로 확장해 본다.
2.1 능동 소나에서 일반적인 시간 지연 신호 모델
이상적인 시간 지연을 나타내는 간단한 신호 모델은 다음과 같다.
여기서 s(n)는 발신 신호이고, 는 s(n)에 대한 감쇠 계수이고, τ는 지연시간이다. 이 모델에 부가 잡음까지 고려하면 Eq. (1)은 다음과 같은 모델이 된다.
여기서 η(n)는 부가 잡음이다. 이 모델에서 s(n), η(n)는 서로 상호 상관 관계가 없다.
2.2 능동 소나에서 두 개의 수신기를 사용한 시간 지연 추정 모델
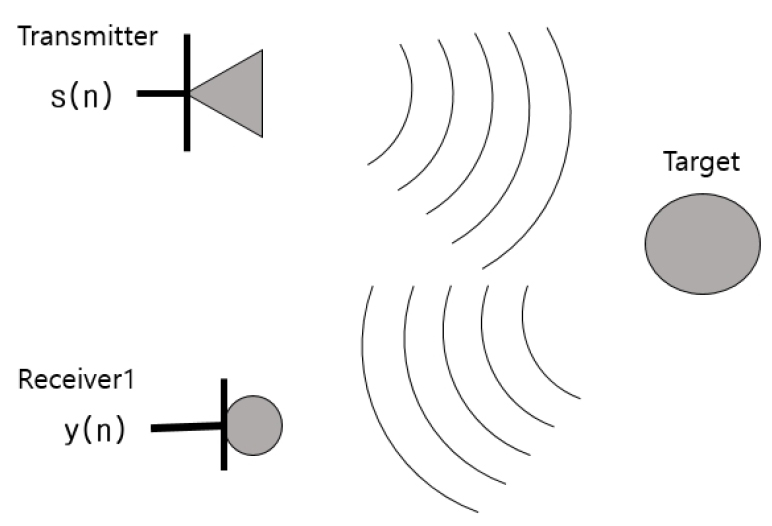
Eq. (1)은 송신기와 수신기 각각 하나일 때 일반적인 능동 소나를 모델하고 있다. 일반적으로 Fig. 1처럼 모델링하는 경우는 수신기가 특정 방향으로 지향된 하나의 수신 빔과 송신기를 단순 모델링할 때 많이 쓴다. 이 경우는 방위 정보는 수신빔이 지향하는 방향을 그대로 사용한다. 그러나 이렇게 미리 지향한 빔으로 방위를 추정할 경우 수신빔의 폭 때문에 불확실한 방위각 영역이 존재한다. 따라서 레이더나 소나에서 모노펄스 방식과 같이 지향한 수신빔을 둘로 나눠서 수신 신호를 나누고 그들 사이의 관계를 이용하여 좀 더 상세한 방위 정보를 얻고 있다.[7]
III. 가중 딕션너리를 이용한 시간 추정
이상적인 모델 Eq. (1)로부터 시간 지연을 추정하기 위해서 시간 지연 현상을 시간 지연 시스템으로 생각한다면, 그 시스템의 입력은 소나의 송신 신호, s(n), 이고, 출력 신호, y(n), 는 소나로 되돌아온 반사파 신호로 생각할 수 있다. 시간 지연 값을 추정하기 위해서 Eq. (1)의 양변을 N-point DFT를 취하면 다음 식과 같다.[8]
여기서 F( )는 DFT 이고, , 는 반사음 도달할 때까지의 시간 값이다. Eq. (3)은 다음과 같이 다시 쓸 수 있다.
여기서 Y(k), S(k)는 각각 y(n), s(n)의 N-point DFT이다.
Eq. (4)에서 시간 지연을 추정하기 위해서 Eq. (5)처럼 입력, S(k), 과 출력, Y(k),의 비를 통해서 시스템의 전달 함수의 주파수 특성을 구한다.
Eq. (5)를 보면 시간 지연 추정 문제는 주파수 추정 문제로 바꿔 생각할 수 있음을 알 수 있다. 그러나 이 추정 방법에서는 모델 Eq. (2)에서 설명한 부가 잡음에 대한 고려가 없이 출력의 푸리에 변환을 송신 신호의 푸리에 변환으로 나눈 것이다. 따라서 Eq. (2)를 이용하여 다시 쓰면, Eq. (5)는 Eq. (6)과 같이 되고, 이때 부가 잡음의 푸리에 변환값을 송신의 푸리에 변환값으로 나누는 항이 존재하게 된다.
여기서 k = 0 ~ N-1이고 E(k)는 잡음 η(n)의 푸리에 변환이다. Eq. (6) 을 보면 H(k)는 주파수가 인 신호라고 할 수 있고, 구하고자 하는 시간 지연 값은 H(k)의 푸리에 변환으로부터 구할 수 있다. 이 경우 두 가지 단점을 발견할 수 있는데, 첫째는 신호의 길이가 충분히 길지 않으면 주파수 해상도가 떨어져서 정확한 주파수 값을 추정하지 못할 수 있다. 둘째는 Eq. (6)의 두 번째 항을 보면 잡음과 신호의 주파수 성분비로 구성되어 있다. 이는 나누는 S(k)의 특정 주파수 빈의 값이 ‘0’이거나 매우 작은 값이면 잡음 항을 나눈 결과가 ‘이상 증폭’ 되는 현상이 생김을 알 수 있다. 따라서 입력과 출력의 비를 사용하지 않는 새로운 주파수 추정 방법이 요구된다.
새로운 주파수 추정 방법을 유도하기 위해서 Eq. (4)를 모든 k에 대해서 다시 쓰면 Eq. (7)과 같이 쓸 수 있다.
또 Eq. (7)은 Eq. (8)과 같이 행렬식으로 쓸 수 있다.
여기서 이다. S는 s(n)의 푸리에 변환 값을 대각요소로 하는 대각 행렬이고, 행렬 를 Eq. (7)에서 보면 모든 열이 존재 가능한 후보 주파수 항들로 이루어진 행렬이다. 이 행렬 를 ‘딕션너리’라고 부른다.[9]
Eq. (4)와 Eq. (8)을 비교해 보면 미지수 벡터 의 요소는 참 지연에 해당하는 하나의 요소값만 ‘0’이 아니고, 나머지 항들은 ‘0’이 되는 ‘해의 희소성’ 특징이 있음을 알 수 있다. 따라서 해를 구할 때 해의 희소성을 이용한다면 더 좋은 추정이 가능하다. 이를 위해서 희소성 추정 분야에서 많이 사용하는 l1 정규화 항을 부가하여 다음과 같이 다시 쓴다.[9,10
여기서 를 딕션너리라고 할 때 는 에서 에 대한 가중 역할을 하고 있으므로 본 논문에서는 이 를 ‘가중 딕션너리’라고 하기로 한다. 그리고 일반적으로 행렬 는 열의 수가 행의 수보다 더 큰 행렬이 된다. 이는 변수보다 식의 수가 적은 경우인 과소 결정계(underdetermined)가 되어, Eq. (8)의 해를 구할 때 직접적으로 역행렬을 사용하지 않고, 딕션너리에 있는 해의 후보 중에서 적당한 것을 선택하고, 그 선택의 결과에 대한 평가를 반복하는 방법으로 최적의 해를 찾는다.[9] Reference [9]에는 이렇게 해를 구하는 방법으로 Greedy 방법을 소개하고 있다. 이렇게 구한 Eq. (8)의 해인 벡터 의 요소는 추정하려는 지연 시간과 관련된 주파수 성분의 계수와 1:1 대응한다. 따라서 중 어떤 요소가 의미 있는 크기의 값을 갖는다면 그에 해당하는 주파수가 존재하는 것으로 해석할 수 있다.
Eq. (8)을 이용하여 시간 지연을 추정할 때 부가 잡음의 영향을 보기 위해서 다시 쓰면 Eq. (10)과 같다.
Eq. (10)를 앞서 기술한 Greedy 방법으로 해를 구할 때 두 가지 방법으로 해를 구할 수 있다. 첫 번째 방법은 Eq. (10)의 우변에 있는 대각 행렬 S의 역행렬을 좌우 변에 곱하여 다음 Eq. (11)과 같이 만든 후 Reference [9]에 소개된 Greedy 방법으로 해를 구하는 것이다.
이 경우 우변에 나누는 항에서 잡음 증폭 현상을 예상할 수 있으나, Eq. (9)에서 소개한 l1 정규화 항을 부가하고 Greedy 방법으로 해를 구할 때, Eq. (6)으로부터 N개의 H(k)의 데이터 열을 만들고 이를 DFT를 이용하여 주파수 분석을 하는 것보다는 견실한 해를 구할 수 있을 것이 기대된다. 두 번째 방법은 Eq. (10)에서 우변에 있는 대각 행렬 S를 그대로 두어 행렬 W를 가중하는 행렬 구실을 하도록 한다. 이 경우는 잡음 항을 나누는 경우가 없어서 잡음의 이상 증폭 현상이 생기지 않는다. 그리고 이 역시 Eq. (9)에서 소개한 l1 정규화 항을 부가하고 Greedy 방법으로 해를 구할 때 낮은 신호 대 잡음 비인 경우에도 견실한 해를 구할 수 있을 것이 기대된다. 이렇게 l1 정규화 항을 포함한 Eqs. (10)과 (11)을 Greedy 방법으로 푸는 소프트웨어 툴은 여러 가지 라이브러리 형태로 발표되어 사용되고 있다. 그중에는 l1-magic,[11] MOSEK,[12] PDCO-CHOL,[13] PDCO -LSQR,[13] 그리고 SPGL1[14]이 일반적으로 많이 쓰이고 있다. 본 논문에서는 이들 중에서 프로그램 사용법이 잘 준비되어서 매트랩 프로그램 환경에서 쉽게 쓸 수 있는 SPGL1을 사용하였다.[14]
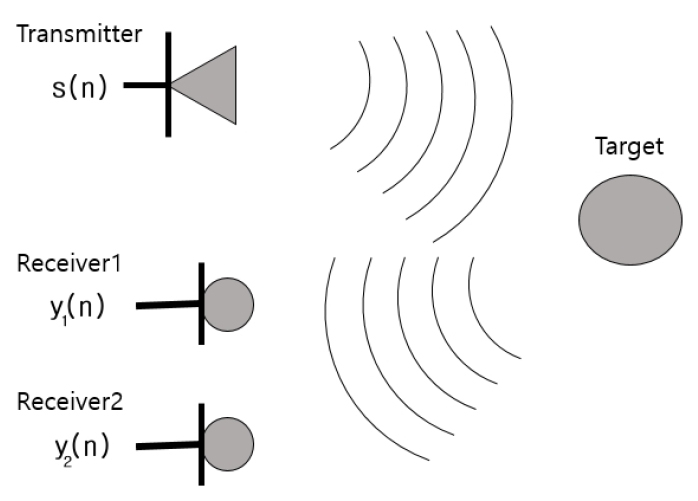
Eq. (10)을 그대로 사용한다면 Fig. 1과 같은 송신기 하나에 수신기 하나일 때 시간 지연을 추정하는 데 사용할 수 있으나, Eq. (10)을 두 개의 수신기마다 사용한다고 가정하면, 각각의 수신기마다 목표물에서 오는 지연 시간을 따로 추정하고, 이 개별 수신기의 시간 지연 값들의 차를 구한다면 두 수신기 간의 상호 시간 지연 값 을 구할 수 있다. 여기서 은 Fig. 2의 수신기1에서 추정된 지연 시간이고, 은 Fig. 2의 수신기2에서 추정된 지연 시간이다. 그리고 이를 통해서 다음 Eq. (12)으로 방위각으로도 환산할 수 있다.
여기서 l은 두 수신기의 이격 거리이다. c는 전달 속도 이고 는 방위각이다.
IV. 모의실험 결과
제안된 알고리즘의 성능을 확인하기 위해서 Eq. (8)에서와 같이 송신 신호를 가중치로 사용한 가중 딕션너리의 경우와 Eq. (6)에서와 같이 송신 신호를 사용하여 바로 나누는 경우를 각각 사용한 시간 지연 추정 실험을 하였다.
본 비교실험을 위한 발신 신호는 시간 - 대역폭 곱이 각각 150과 500인 두 종류의 선형 주파수 변조 신호를 사용하였다. 또 두 개의 수신 채널 간의 시간 지연을 y1(n)보다 y2(n)가 5 표본 뒤지게 도착하도록 타겟과 두 수신기들을 구성하였다. 즉, y2(n) = y1(n−5) 이다. 각 신호 y1(n)과 y2(n)에는 두 백색 가우시안 잡음, η1(n)과 η2(n)가 각각 부가하었다. 이들 부가 잡음들은 서로 상관관계가 없도록 하였다. 그리고 모의실험에서는 신호 대 잡음 비를 달리하면서 실험하였다. 그리고 Eq. (10)와 같이 가중 딕션너리를 사용하는 경우와 Eq. (11)에서 가중치를 사용하지 않은 딕션너리를 사용하는 방법에 각각 l1 정규화 항을 부가하여 Greedy 방법으로 두 수신기 사이의 시간 지연을 추정하였다. 또 Eq. (6)를 사용한 방법과 주파수 영역 방법은 아니지만, 시간 지연추정 분야에서 기준 알고리즘이라고 할 수 있는 일반 상호 상관(Generalized Cross Correlation-Phase transform,GCC-PHAT)[3]1) 방법을 사용하여 추정 실험을 하였다. 실험 결과를 정리하여 보이기 위해서 신호 대 잡음 비에서 성공적으로 시간 지연 값을 추정하는 비율을 그래프로 나타내었다. 이 그래프를 통하여 잘못된 추정을 시작하는 신호 대 잡음 비(문턱값)를 확인하고, 개별 알고리즘의 문턱값들을 서로 비교하여 볼 수 있도록 하였다.
1) matlab의 phase array toolbox에 속하는 gccphat사용.
Fig. 3은 시간 - 대역폭 곱이 150인 경우 신호 대 잡음비의 범위가 –20 dB부터 70 dB 사이에서 정확한 추정을 한 결과를 비율로 나타내어 비교하였다. 각 알고리즘들 사이의 성능을 비교하기 위해서 정확한 추정을 한 비율이 1에서 0.9로 떨어지는 경우를 기준으로 하였다. 이 기준으로 보면 Eq. (10)와 같이 가중 딕션너리를 사용하는 제안 알고리즘은 –16 dB에서 0.9로 떨어졌고, Eq. (11)와 같이 가중 딕션너리를 사용하지 않고, l1 정규화 항만을 부가하여 Greedy 방법으로 해를 구하는 경우는 –1 dB에서 0.9로 떨어졌다. 즉 같은 l1 정규화를 하고 같은 반복적 해법을 사용한 때도 가중 딕션너리 사용 여부에 따라 약 15 dB의 성능 차이를 보였다. 반면에 Eq. (6)와 같은 주파수 축 방법을 사용하였을 때 48 dB에서 벌써 0.9에 이르렀다. 또 일반 상호 상관[3] 방법은 34 dB에서 정확한 추정 비율이 0.9에 이르렀다. 이를 통해서 제안한 방법이 잡음 증폭 현상이 없이 주파수 영역에서 시간 지연을 추정할 수 있음을 알 수 있다. 그리고 잡음 증폭 현상이 있는 일반 방법보다 64 dB 정도의 신호 대 잡음비 이득이 생김을 알 수 있다.
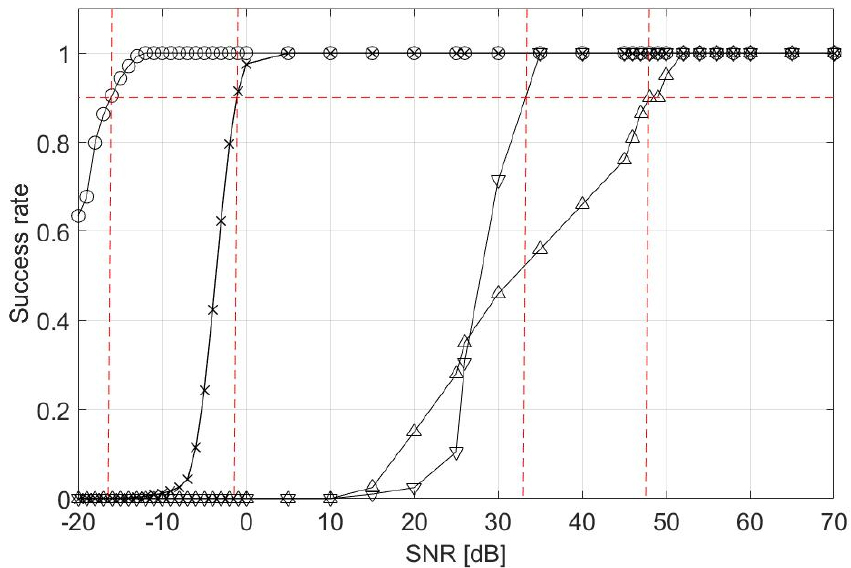
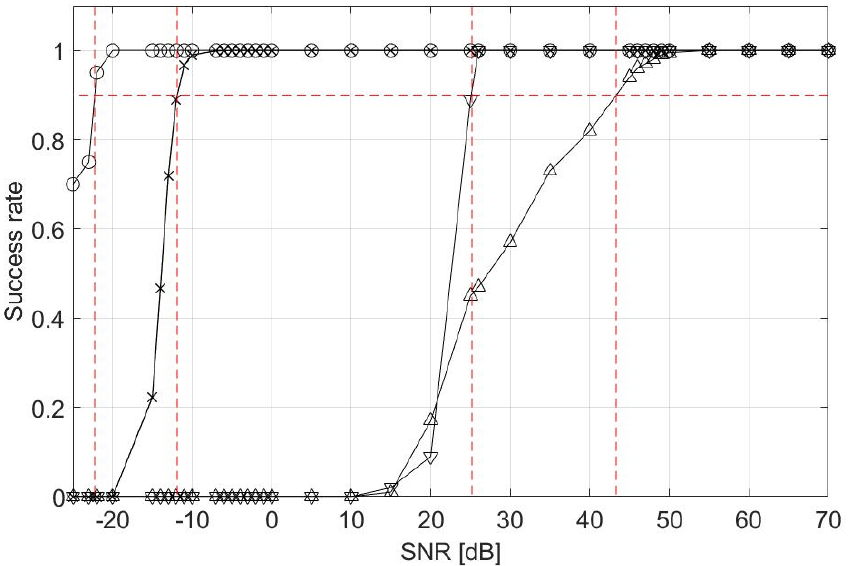
Fig. 4은 시간 - 대역폭 곱이 500인 경우 신호 대 잡음비의 범위가 –25 dB부터 70 dB 사이에서 정확한 추정하는 비율을 비교하였다. 성능 비교 기준은 Fig. 3과 같다. 이 기준으로 보면 Eq. (10)와 같이 가중 딕션너리를 사용하는 제안 알고리즘은 –22 dB에서 0.9로 떨어졌고, Eq. (11)와 같이 가중 딕션너리를 사용하지 않고, l1 정규화 항만을 부가하여 Greedy 방법으로 해를 구하는 경우는 –12 dB에서 0.9로 떨어졌다. Fig. 3에서와 같이 똑같은 목적함수와 방정식 해법을 사용하지만, 가중 딕션너리 사용 여부에 따라 10 dB의 차이를 내고 있음을 알 수 있다. 반면에 Eq. (6)와 같은 주파수 축 방법을 사용하였을 때 43 dB에서 벌써 0.9에 이르렀다. 또 일반 상호 상관[3] 방법은 25 dB에서 정확한 추정 비율이 0.9가 되었다. 이 결과에서도 제안한 방법이 잡음 증폭 현상이 없이 주파수 영역에서 시간 지연을 추정할 수 있음을 알 수 있고, 잡음 증폭 현상이 있는 일반 방법보다 65 dB 정도의 신호 대 잡음비 이득이 생김을 알 수 있다.