

I. 서 론
수중음향 변환기인 클래스 IV 굴곡 트랜스듀서는 압전 스택이 삽입된 타원 원통형 쉘에 의해 압전 스택의 종방향 진동변위보다 더 큰 진폭의 굴곡 진동 변위를 얻을 수 있어 더 큰 진폭의 음압을 방사할 수 있다.[1,2,3] 이 트랜스듀서의 특성 해석을 위해 금속 타원 원통 쉘의 이론적 진동해석에 관한 다수의 연구 결과가 보고되어 있다.[4,5,6] 그러나 이러한 이론적 해석법은 매우 복잡하여 물리적인 요소의 이해가 간단하지 않으며 계산 결과의 산출을 위한 컴퓨터 프로그램의 구축에 큰 노력이 요구되고 있다. 최근 클래스 IV 굴곡 트랜스듀서의 정확한 설계 및 성능 예측을 위하여 유한요소법을 이용한 특성 해석 및 설계 요소를 최적화하는 연구가 보고되고 있다.[7,8,9] 그러나 유한요소 해석법 역시 설계 요소와 성능과의 물리적인 인과관계 및 효과의 예측이 힘들며 방대한 계산량으로 인하여 많은 시간과 계산 자원의 소모가 요구된다.
본 연구에서는 클래스 IV 굴곡 트랜스듀서에 있어서 압전 스택의 종방향 진동변위와 이로부터 나타나는 금속 타원 원통 쉘의 굴곡 진동 변위의 비를 간단히 도출하기 위하여 타원 둘레 길이의 근사계산법을 이용한 이론적 해석법을 제안하고 실험적으로 그 유효성을 확인한 결과를 보고한다.
II. 진폭 확대율 도출
클래스 IV 굴곡 트랜스듀서는 압전 소자들의 적층 구조인 압전 스택을 타원 원통형 쉘의 안쪽 장축 방향으로 진동하도록 배치한 형태이다. 쉘 구조의 특성상, 압전 스택의 변형보다 훨씬 큰 변위가 원통형 쉘 구조물에서 발생하므로 비교적 낮은 입력 전압에서도 큰 진폭을 제공할 수 있어 에너지 변환이 매우 효율적이다. 이러한 진폭 확대의 원리를 Fig. 1에 나타내었다. Fig. 1(a)는 클래스 IV 굴곡 트랜스듀서 구조에 있어서 원통형 쉘 구조물만을 별도로 분리하여 나타낸 것이고, Fig. 1(b)는 압전 스택에 의해 발생된 응력에 의하여 금속 타원 쉘이 변형되는 모양과 변형 방향을 나타낸 것이다. 타원의 장축 방향 화살표는 압전 스택의 응력에 의한 변형 방향을 나타내고, 단축 방향의 화살표는 장축 방향의 변형에 기인한 단축 방향의 변형 방향을 나타내고 있다. 클래스 IV 굴곡 트랜스듀서의 동작에 있어서 금속 타원 쉘은 타원의 장반경이 이고 단반경이 라고 할 때 장축 방향의 진동 변위에 의해 단축 방향의 진동 변위가 확대된다. Fig. 1(b)에 나타낸 것과 같이 장축 방향의 진동에 의한 장반경의 변화를 라고 할 때 이 변위에 의해 줄어드는 단반경의 변화를 라고 두자. 이러한 변형이 일어나는 동안 타원 원통의 중간 면을 나타내는 점선의 길이 변화는 무시할 수 있다. 즉, 점선으로 나타낸 타원의 둘레 길이는 항상 일정하다고 볼 수 있으며 이는 실용적인 클래스 IV 굴곡 트랜스듀서의 형상 변화의 범위에서는 합리적인 가정으로 볼 수 있다.

일반적인 곡선의 길이는 다음 식으로 주어진다.
곡선이 타원인 경우 방정식은 다음 식으로 쓸 수 있으며,
이때 로 두어 도함수를 구하면 다음과 같이 구해진다.
따라서 Eq. (3)을 Eq. (1)에 대입하면 타원의 둘레는 Eq. (4)와 같이 표현할 수 있다.
Eq. (4)의 적분은 해석적으로는 쉽지 않아 수치적인 방법으로 적분하는 것이 일반적이다. 본 연구에서는 엄밀한 근사식을 도입하여 타원의 둘레 길이는 일정하다고 가정하여 장반경의 변화에 따른 단반경의 변화 경향을 해석한다. 적용한 엄밀 근사식으로는 오차가 가장 작은 것으로 알려진 라마누잔(Ramanujan)의 근사식을 도입하였다.[10] 이 근사법에 따르면, Fig. 1에 나타낸 것과 같이, 압전 스택에 의한 변형이 없는 경우 및 변형이 있는 경우의 타원 둘레는 각각 Eqs. (5)와 (6)과 같이 표현할 수 있다.
변형 전후의 타원 둘레 길이의 변화는 없다는 가정에 따라 Eqs. (5)와 (6)을 일치시키면 다음의 관계를 얻을 수 있다.
진폭 확대율을 로 두어, Eq. (7)을 정리하면 다음과 같이 정리할 수 있다.
여기서 종횡비를 , 장축 방향의 변형을 로 두었다. 도출된 Eq. (8)로부터 클래스 IV 굴곡 트랜스듀서의 진폭 확대율, 는 금속 타원 원통 쉘의 종횡비에 의존함을 알 수 있다.
III. 진동 변위 측정
실험을 위하여, Fig. 2에 보인 것과 같은, 클래스 IV 굴곡 트랜스듀서를 제작하였다. 각 부분의 치수는 Table 1에 정리하여 나타내었다. 이론에서의 가정을 만족시키기 위하여 압전 스텍의 직경 는 타원 원통의 길이 와 동일하게 설계하였다. 그 외 치수의 비율은 사용되고 있는 일반적인 클래스 IV 굴곡 트랜스듀서의 비율과 유사하게 정하였다.
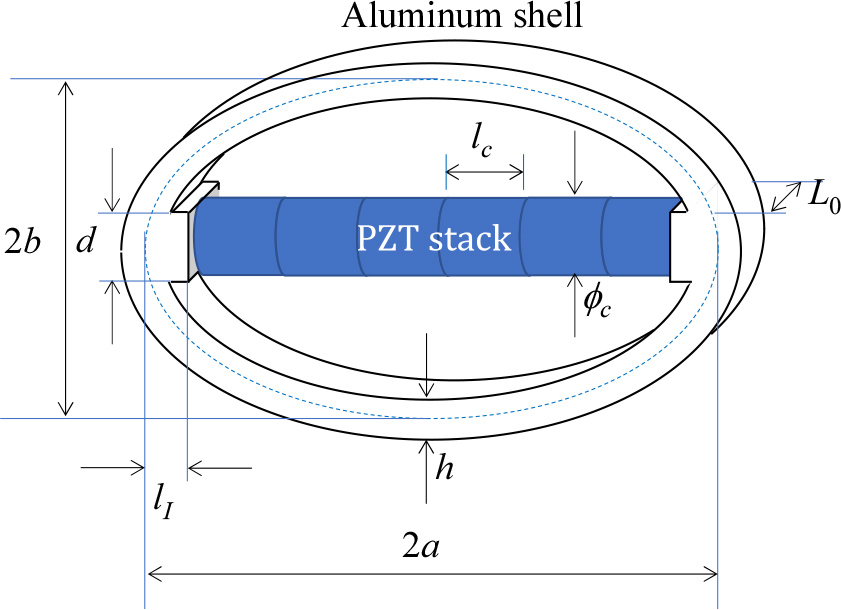
Table 1.
Dimensions of each part of the transducer.
| Part | Size (mm) |
| a | 40.0 |
| b | 20.0, 25.0, 30.0, 35.0, 40.0 |
| d | 12.0 |
| h | 1.0 |
| L0 | 10.0 |
| lI | 4.0 |
| lc | 12.0 |
| 𝜙c | 10.0 |
원통형 쉘의 장반경 길이 와 두께 를 일정하게 두고 단반경 길이 에 변화를 주어 5가지 다른 종횡비를 가지는 알루미늄 타원형 쉘을 제작하였다(Fig. 3 참조).
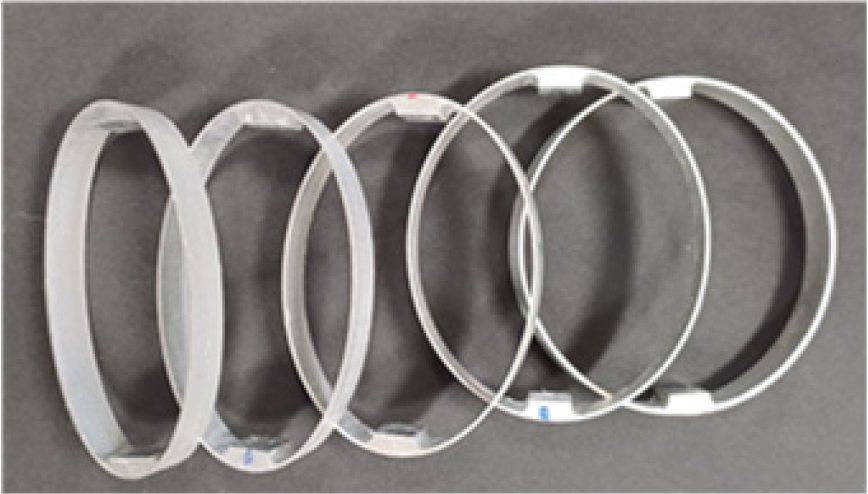
Fig. 4는 압전 스택의 모식도를 나타낸 것으로, 압전 진동자 6개를 사용하여 각 2개씩 분극 방향을 서로 마주 보도록 접합하고 다시 길이 방향으로 접합한 후 전원선을 연결하였다. 압전 스택의 전체 길이는 72.18 mm이며, 금속 원통형 쉘의 재료인 알루미늄은 밀도 𝜌=2,710 kg/m3, 영률 =68.9 MPa이다. 그 외 압전 스택의 물성값은 Table 2에 정리하였다.
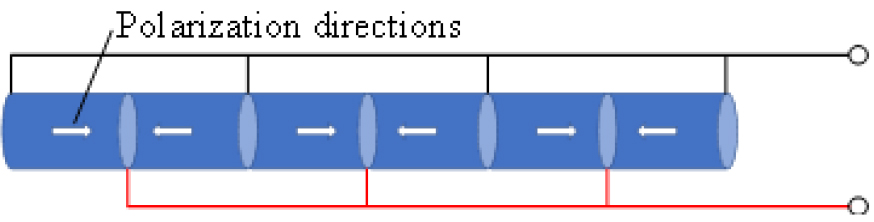
Table 2.
Material constant of the piezoelectric stack.
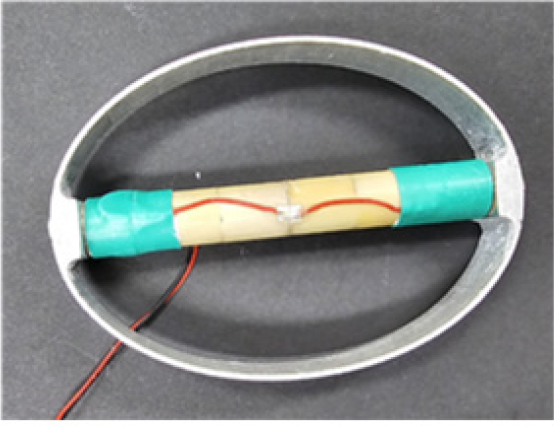
제작된 압전 스택을 타원 원통 쉘에 삽입시켜 클래스 IV 굴곡 트랜스듀서를 제작하였고, 한 예를 Fig. 5에 나타내었다.
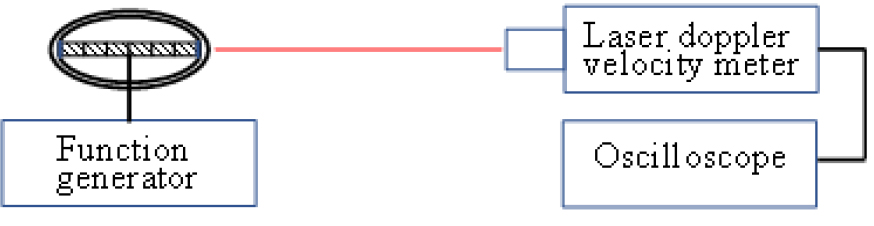
제작된 5가지 다른 종횡비를 가진 클래스 IV 굴곡 트랜스듀서는 압전 스택 전기단자에 정현파 신호를 인가하였다. 이때 인가된 정현파 신호의 구동 주파수는 종횡비가 다른 각 쉘에 대한 기본 공진주파수이며, 이는 레이저 도플러 진동 속도계(Laser Doppler Velocimetry, LDV)를 이용하여 측정된 값이다. 즉 5종의 쉘 각각에 대해 진동 진폭이 가장 큰 단축 방향의 쉘 표면에서의 LDV 출력이 가장 크게 나타나는 주파수를 찾아 기본 공진주파수로 결정하였다. 함수발생기를 이용하여 각 경우의 기본 공진주파수로 인가할 때 발생하는 타원 쉘의 진동 변위를 타원의 장반경 방향과 단반경 방향에 대해 각각 레이저 도플러 진동계(NOVA-Series, optomet.)를 이용하여 진동 변위를 측정하였다(Fig. 6 참고).
IV. 결과 및 분석
상술한 5종의 클래스 IV 굴곡 트랜스듀서에 대해서 장축 방향 및 단축 방향에서 측정한 진동 변위의 비를 Table 3에 나타내었다. 여기서 진폭 확대율 는 각 쉘에 대해 5회 반복 측정의 평균값을 나타낸 것이다. 이 결과를 보면 종횡비()가 증가할수록 진폭 확대율은 감소하는 경향을 보인다. 또한 종횡비가 증가함에 따라 공진주파수도 증가함을 알 수 있다. 구동 전압은 각 경우에 있어서 신호 대 잡음비를 고려하여 측정이 쉬운 전압을 선택하였다. 구동 전압에 특정 경향이 없는 것은 타원 원통형 쉘과 압전 스택과의 접착 상태에 기인한 변환 효율의 변화 때문으로 생각된다.
Table 3.
Amplitude magnification ratio depending on the aspect ratio of the elliptical cylinder.
| Aspect ratio r | 0.5 | 0.625 | 0.75 | 0.875 | 1 |
|
Driving frequency f (kHz) | 9.82 | 10.86 | 11.12 | 12.44 | 13.45 |
| Driving voltage (Vpp) | 10.0 | 4.0 | 8.5 | 8.0 | 9.0 |
| Amplitude magnification ratio G | 5.9 | 3.5 | 2.0 | 1.9 | 2.2 |
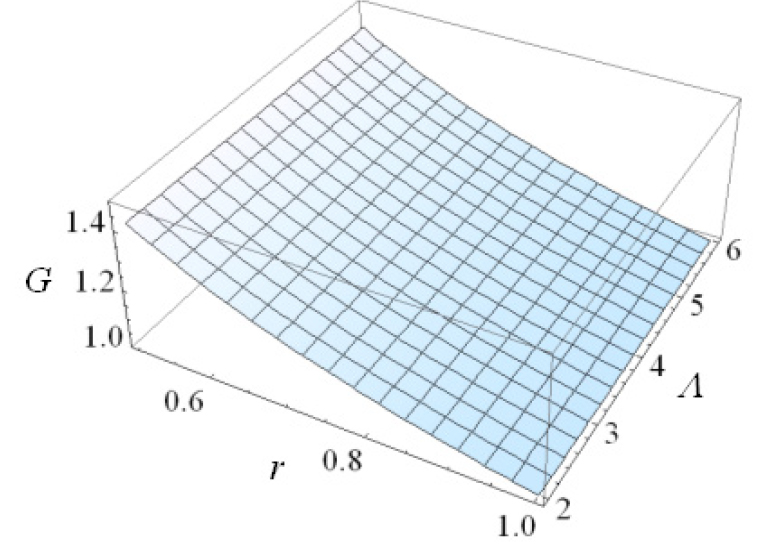
한편 Eq. (8)을 사용하여 설계된 트랜스듀서의 진폭 확대율을 타원 원통의 종횡비 및 장축 방향의 변형 변화에 따라 계산한 결과를 Fig. 7에 나타내었다. 이 결과는, 앞서 나타낸 실험 결과와 같이, 종횡비(b/a)가 증가할수록 진폭 확대율은 감소하는 경향을 보이지만 축 방향 변형의 변화에는 큰 변화가 없음을 확인할 수 있다.
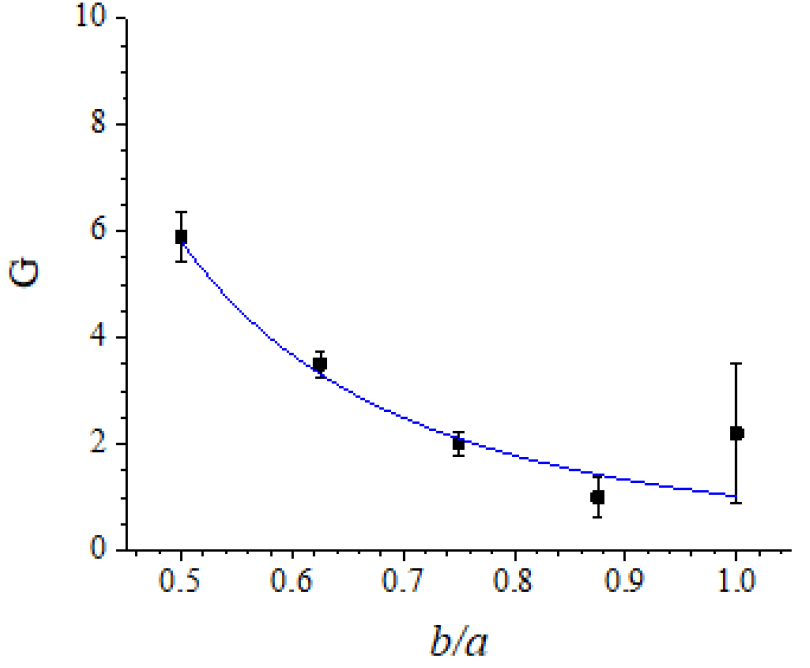
실용적인 활용을 위하여 도출한 Eq. (8)의 진폭확대율을 기준함수로 하여 Table 3의 실험 결과를 회귀 분석하여 구한 회귀함수를 Eq. (9)에 나타내었다.
여기서
,
,
이며 =3.5, =2.85, =-11.68로 구해졌다. Eq. (9)의 계산 결과와 Table 3의 실험 결과를 비교하여 Fig. 8에 나타내었다. 이 결과를 보면 많은 영역에서 회귀함수 결과와 실험 결과가 잘 일치함을 알 수 있어, 본 연구에서 제안한 종횡비에 따른 진폭 확대율 해석법의 유효성을 확인할 수 있었다. 단 종횡비가 1에서 비교적 큰 차이가 발생하였는데 이는 압전 스택과 타원형 쉘 사이의 결합력 차이에 의한 오차로 생각된다. 좀 더 구체적으로 추론해 보면, 타원형 알루미늄 쉘의 종횡비가 1인 경우, 즉 쉘이 원형에 가까운 형상을 가지게 되면 내부에 삽입된 압전 스택의 고정력이 감소하여 기계적 결합이 불완전해질 가능성이 존재한다. 이러한 경우 압전 스택과 쉘 사이의 접촉력이 감소하면서 압전 스택이 진동할 때 쉘과의 접촉면에서 미세한 분리가 발생할 수 있다. 결과적으로 압전 스택과 알루미늄 쉘이 독립적으로 진동하게 되며 두 구속 요소 간의 진동 위상 차이가 발생할 가능성이 높아진다. 특히 LDV를 이용한 진동 측정 시 쉘의 진동과 압전 스택의 진동이 상이한 위상을 가지면 LDV가 측정하는 속도 신호에 시간적으로 불균일한 도플러 주파수 변화를 유발할 수 있다. 이는 측정된 진동변위가 일정하지 않은 형태를 보이게 만들며 반복적인 측정에서도 편차가 크게 나타나는 원인이 된다. 이러한 현상은 Fig. 8에서 확인할 수 있듯이, 종횡비가 1인 경우의 측정 데이터에서 상대적으로 큰 편차로 나타났다. 따라서 압전 스택과 쉘 간의 기계적 결합력 변화가 시스템의 진동 응답에 미치는 영향을 정량적으로 분석할 필요가 있으며 이에 대한 고찰은 향후 연구과제로 남겨 둔다.
V. 결 론
본 연구에서는 클래스 IV 굴곡 트랜스듀서의 종횡비에 따른 진폭 확대율 특성을 이론적으로 도출하였고, 실험적으로 검증하였다. 타원 쉘의 종횡비가 증가함에 따라 진폭 확대율이 감소하는 경향을 확인하였으며, 이는 이론적 계산과 실험 결과 모두에서 일관된 양상을 보였다. 특히, 실험 데이터를 기반으로 회귀 분석을 통해 도출된 함수는 이론식과 높은 일치를 보여, 제안된 해석법의 유효성과 실용성을 입증하였다. 본 연구 결과는 클래스 IV 굴곡 트랜스듀서의 설계 최적화와 성능 예측에 있어 중요한 기초 자료를 제공하며, 다양한 종횡비와 장축 방향 변형 조건에서도 적용할 수 있는 해석법을 제시한다. 또한 수중음향 변환기 설계 및 제작의 효율성을 높이는 데 기여할 수 있을 것으로 기대된다.
