

I. 서 론
능동소나를 이용하여 수중물체의 속도를 추정하려면 Continuous Wave(CW) 펄스와 같이 단일 주파수를 송신하는 신호를 이용하는 것이 일반적이다. 하지만 수중물체의 속도가 빠르지 않으면 근거리에서는 잔향음의 영향으로 수중물체 탐지가 어려워 CW 펄스를 이용한 표적의 속도 추정이 용이하지 않다.[1,2] Hyperbolic Frequency Modulation(HFM) 펄스와 같이 시간에 따라 주파수가 변하는 광대역 펄스 신호는 잔향 환경하에서도 수중물체 탐지가 가능하지만 도플러 변화에 둔감하다. 따라서 1개의 HFM 펄스 반향음에 대하여 여러 도플러에 해당하는 레플리카(Replica)들을 이용해도 정합필터 출력단에서의 크기 차이가 거의 없어 잡음의 영향을 많이 받으므로 표적의 속도 추정이 어렵다.[3,4]
2017년도에 Wang 연구진은 동일한 대역의 상반된 스윕방향의 두 HFM 펄스를 이용하여 두 펄스 간 송신 시간간격과 탐지시간 차이의 변화를 통하여 수중물체 속도 추정이 가능하다는 것을 시뮬레이션으로 보여주었다.[1] 하지만 동일한 대역을 이용하므로 상호상관성에 의해서 잔향음 준위가 20 dB 이상 높아지므로 수중물체 탐지 성능이 그 만큼 저하될 수 밖에 없다. 상호상관성을 감소시키기 위해서는 주파수 대역을 분리하는 것이 가장 좋은 방법이다. 따라서 주파수 대역이 분리된 상반된 스윕방향의 두 HFM 펄스를 이용한 수중물체의 시선속도 추정 방법을 제안한다. 제안한 방법은 주파수 대역폭이 동일하지 않아도 되므로 Wang 연구진의 기법을 일반화한 것으로 볼 수 있다. 송신센서의 가용한 대역폭이 제한되는데 두 대역을 이용하면 각 펄스에서 사용이 가능한 주파수 대역이 줄어들어 잔향음 영향이 커질 수 있으므로 용도에 맞게 적절하게 주파수 대역을 설계해야한다.
본 논문은 2장에서는 HFM 펄스의 특성을 고찰하고 이론적으로 송신신호와 움직이는 표적에 의해 반향된 수신신호를 살펴본다. 3장에서는 상반된 스윕방향의 두 대역 HFM 특성을 고찰하고 수중물체 시선속도 추정 이론을 제시한다. 4장에서는 시뮬레이션을 통하여 제안한 방법에 대한 시선 속도 추정 성능을 분석하고, 마지막으로 5장에서 결론으로 마무리 짓는다.
II. HFM 펄스 특성
대역폭이 Hz이고, 펄스길이가 초인 HFM 펄스는 다음와 같은 식으로 생성하여 음원에서 송신한다.[5]
여기서 는 펄스길이(s), 은 시작주파수(Hz), 는 종료주파수(Hz)이다. 는 주파수 변화율을 의미하며, 이다. >0이면, 다운스윕(down-sweep) 펄스이고, 반대의 경우는 업스윕(up- sweep) 펄스이다. 시작주파수가 종료주파수보다 낮은 HFM 송신펄스를 도식화하면 Fig. 1과 같다.
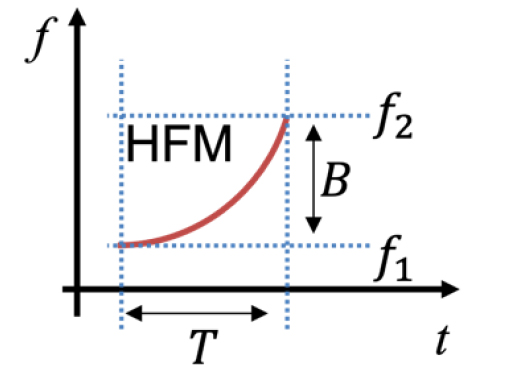
Fig. 1에서 는 대역폭 ()이다. 수중음원에서 송신된 HFM 펄스가 움직이는 수중물체에서 반향되어 음향센서에 수신되면 도플러 영향으로 아래와 같은 식으로 수신된다.
여기서 는 도플러 비율 인자 또는 압축인자이다. 송신기와 수신기의 위치는 동일(단상태 소나)하고 송수신기와 수중물체가 일직선상에 존재하며 송수신기는 움직이지 않는 경우를 가정하면, 수신기에서 나타나는 도플러 비율인자는 다음과 같이 근사화할 수 있다. 수중음속에 비해 수중물체의 속도가 매우 작기 때문이다.
여기서 는 수중물체의 속도이고, 는 수중음속으로 약 1500 m/s이다. 이면, 수신기와 수중물체가 가까워지고, 반대의 경우는 멀어진다.
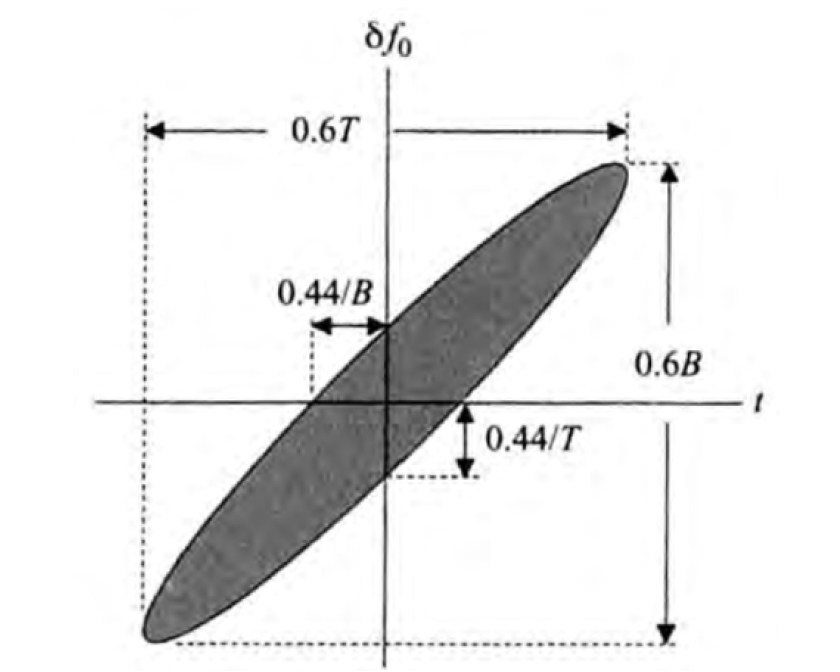
HFM 펄스의 -3 dB 모호도(Ambiguity)는 Fig. 2와 같다. 이 모호도가 의미하는 것은 잡음이 없는 이상적인 경우에 송신펄스와 여러개 레플리카(Replica)를 이용하여 수중물체를 탐지한다면 탐지시점에 시간해상도는 0.88/이고 도플러 해상도는 0.88/이다.[6] 이 모호도는 시간과 도플러 상에서 최대값 대비 -3 dB 범위를 보여주며 도플러 모호도가 ±0.3까지 영향을 미치므로 레플리카는 0.6 이상 떨어뜨려 생성하는 것이 효과적이다. 예를 들어, 단상태 소나로 송수신기와 수중 물체가 일직선상에 존재하며 송수신기가 움직이지 않는 경우를 가정하고, 송신 중심주파수가 5,000 Hz이고 대역폭이 400 Hz인 HFM 펄스 신호는 수중물체의 속도가 약 ±18 m/s 이하일 경우에 1개의 레플리카로만으로도 부정합이 -3 dB 이내이다.
III. 상반된 스윕방향의 두 대역 HFM 펄스 특성
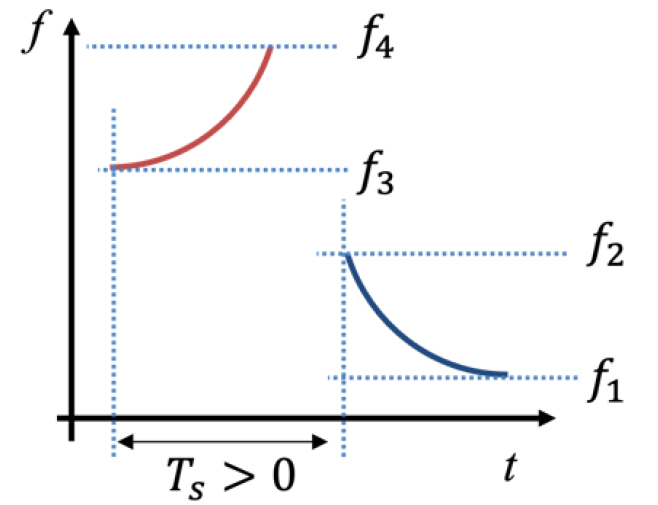
이제 상반된 스윕방향의 두 대역 HFM 펄스 특성을 살펴보자. Fig. 3과 같이 첫번째 HFM 펄스는 업스윕이고, 두번째 HFM 펄스는 다운스윕이다. 두 HFM 펄스를 이용하므로 두 펄스 간 시간 차이가 필요하며 이를 펄스 간 시작시간 차이 라고 하자. >0이면 업스윕-다운스윕 펄스 순으로 송신되고, 반대의 경우는 다운스윕-업스윕 펄스 순, 즉 순서가 바뀌어서 송신된다.
첫번째 업스윕 HFM 펄스의 수신시간()은 Eq. (4)와 같다.
여기서 수중물체가 정지 시 반향신호의 도달시간은 이고, 수중물체의 시선속도에 따른 도달시간 변화량은 이다. 이 변화량은 Eq. (5) 로 근사화할 수 있다. 는 Eq. (3)에서 로 근사화할 수 있지만, Eq. (5) 분모항의 는 1로 근사화하였다. 그 이유는 수중음속에 비해 수중물체의 속도가 매우 느리기 때문이다.
두번째 다운스윕 HFM 펄스의 수신시간()은 Eq. (6)과 같다.
여기서 수중물체가 정지 시 반향신호의 도달시간은 이고, 수중물체의 시선속도에 따른 펄스 간 시작시간 차이 변화량은 이고, 도달시간 변화량은 이다. 두 변화량은 다음과 같은 식으로 근사화할 수 있다.
움직이는 수중물체의 반향에 따른 업스윕 펄스 수신시간 대비 다운스윕 펄스의 수신시간은 Eq. (9)와 같다.
Eq. (9)를 정리하면 다음과 같다.
수중물체의 속도에 대한 식으로 전개하면 Eq. (11)과 같다.
여기서 두 펄스의 대역 폭이 동일하게 라면 아래 식과 같이 더욱 간략화할 수 있다.
여기서, /2를 제외한 분자항은 수중물체의 시선속도에 의한 시간 차이 변화량만을 나타내고, 분모항은 펄스길이, 대역폭, 종료주파수 (, ), 펄스 간 시작시간 차이()에 의한 상관관계를 보여준다. Eq. (12)는 에 대한 반비례식을 보여주며 분모항의 가 커질수록 특이점에 가까워지므로 속도 추정의 오차가 커질 것으로 예상된다. 즉, 시선속도가 일정한 수중물체에서 분자항은 변화에 무관하게 시선속도에 의한 시간 차이 변화량이고 분모항은 변화에 의해 속도추정값이 변화한다. =0일때, 속도추정에 영향을 주지 않으므로 속도추정 오차가 최소이다.
상반된 스윕방향의 두 대역 HFM 펄스를 이용하여 수중물체의 시선속도 추정이 가능한 원리를 시각적으로 살펴보자. Fig. 3과 같이 업스윕 HFM 펄스를 송신하고 다운스윕 HFM 펄스를 송신한다. 각 HFM 펄스의 펄스길이와 대역폭은 1 s와 400 Hz이고, 펄스 간 시작 시간 차이()는 1 s이다. 두 수중물체가 동일 거리에 있고 시선속도가 각각 0 kts와 5 kts로 수신기와 가까워지는 경우에 수신신호는 Fig. 4와 같이 수신된다. 적색 점선은 정합필터를 위한 0 kts 기준의 레플리카이고, 청색 점선은 5 kts의 수중물체에서 반향된 신호이고, 흑색 실선은 0 kts의 수중물체의 반향신호이다.
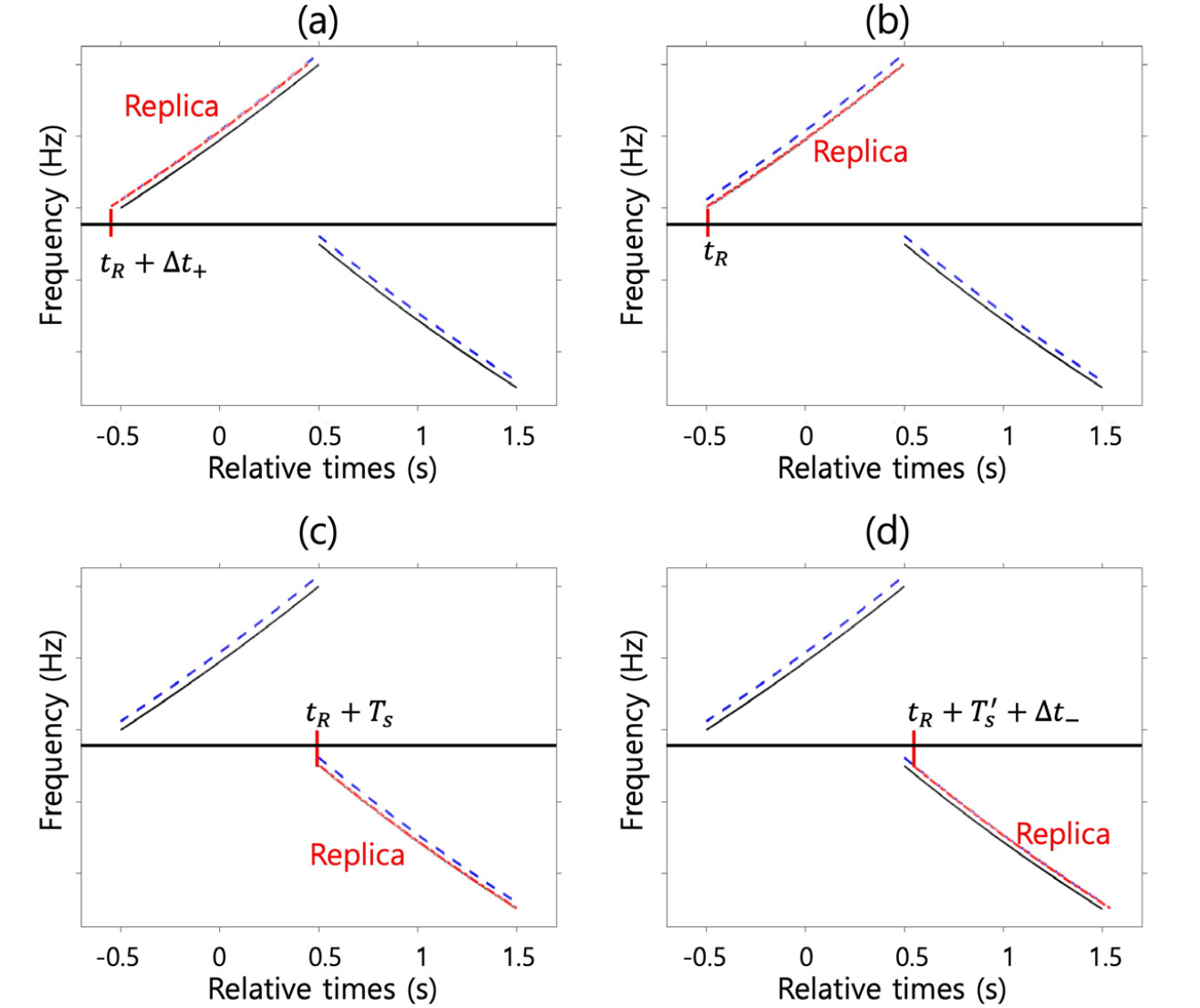
Fig. 4.
(Color available online) Graphical matching receiving time using two frequency band HFM with opposite sweep direction for underwater object at the speed of 5 kts and 0 kts, (a) up-sweep HFM pulse receiving time for underwater object at 5 kts, (b) up-sweep HFM at 0 kts, (c) down-sweep HFM at 0 kts, (d) down-sweep HFM at 5 kts.
Fig. 4(a)에서 업스윕 HFM 펄스와 정합을 위한 레플리카는 먼저 5 kts 수중물체의 반향신호와 시간에 최대 정합이되고, Fig. 4(b)에서 0 kts 수중물체의 반향신호와 시간에 완전히 정합되는 것을 알 수 있다. 여기서 는 음수이다. Fig. 4(c)에서 다운스윕 HFM 펄스와 정합을 위한 0 kts 기준의 레플리카는 0 kts의 수중물체의 반향신호와 시간에 완전히 정합이 되고, Fig. 4(d)에서 5 kts의 반향신호와 시간에 최대 정합된다. 이 시간변화는 업스윕 HFM 펄스와는 반대로 양수이다. Fig. 4(a), (d)에서 볼 수 있듯이 5 kts의 반향신호는 시작 및 종료 주파수 부근에 도플러 변이에 따른 일부 부정합이 발생한다.
IV. 시선속도 추정 시뮬레이션
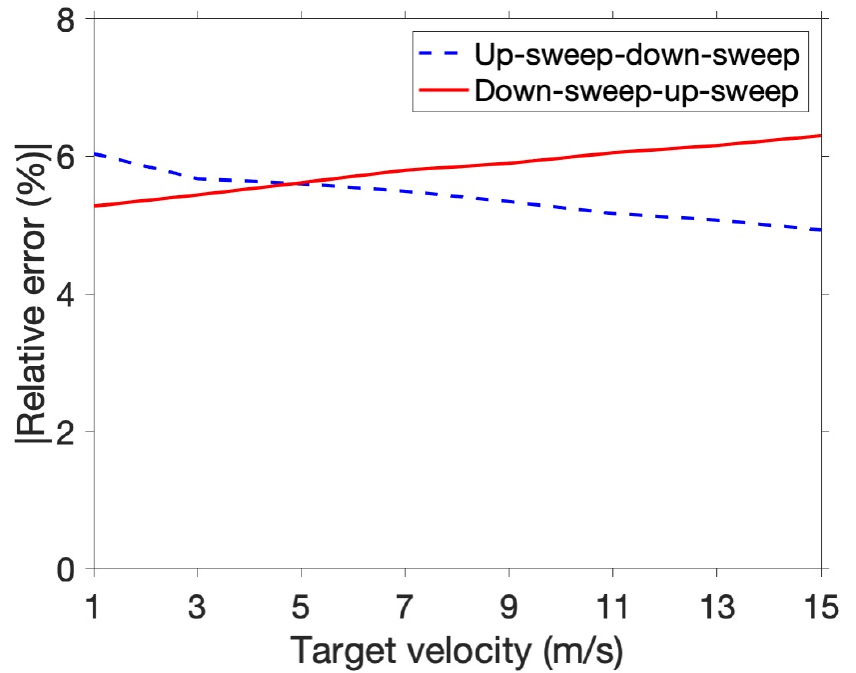
상반된 스윕방향의 두 대역 HFM 펄스를 이용하여 수중물체의 시선속도 추정에 대한 성능을 살펴보자. 첫번째 시뮬레이션은 수중물체 시선속도를 증가시키면서 상대오차를 확인하였다. 펄스길이와 대역폭은 III장과 동일하게 1 s와 400 Hz이고 신호대잡음비 Signal to Noise Ratio(SNR)는 -10 dB로 설정하였다. 그리고 펄스 간 시작시간 차이()는 1 s이다. 먼저 업스윕 후 다운스윕 HFM 펄스를 이용하는 경우로 Eq. (12)를 이용하여 시선속도를 추정하여 Fig. 5에 청색 점선으로 나타내었고, 시선속도가 증가함에 따라 상대오차가 줄어들며 4.9 % ~ 6.0 % 사이이다. 반대로 다운스윕 후 업스윕 HFM 펄스를 이용하는 경우는 적색 실선으로 상대오차의 절대값(실제 상대오차가 음의 값임)이 증가하며 약 5.3 % ~ 6.3 % 사이이다. 상대오차가 바이어스되어 나타나는 것을 알 수 있고, 이는 Eqs. (5)와 (8)에서 의 근사화에 따른 오차로 추정된다.
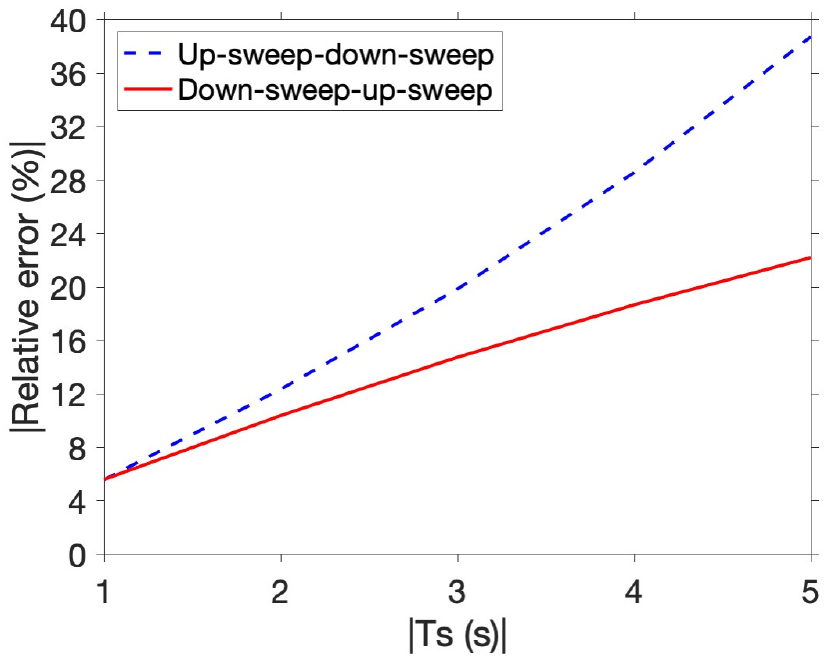
두번째 시뮬레이션은 수중물체 시선속도를 5 kts로 고정시키고 두 HFM 펄스 간 시작시간 차이를 증가시키면서 Eq. (12)를 이용하여 시선속도를 추정하여 속도 추정 성능을 확인하였다. 먼저 업스윕 후 다운스윕 HFM 펄스를 이용하는 경우로 Fig. 6에 청색 점선으로 나타내었다. 시간 차()가 증가함에 따라 상대오차가 급격하게 증가하며 오차범위는 5 % ~ 39 % 사이이다. 반대로 다운스윕 후 업스윕 HFM 펄스를 이용하는 경우는 적색 실선으로 상대오차의 절대값(실제 상대오차가 음의 값임)이 급격하게 증가하며 약 5 % ~ 23% 사이이다. 이러한 상대오차 증가 추세는 앞서 이론 부분에서 설명한 바와 같이 Eq. (12)에서 분모항의 가 커질수록 특이점에 가까워짐에 따른 현상이다.
세번째 시뮬레이션은 수중물체 시선속도를 5 kts로 고정시키고 입력 SNR을 -25 dB에서 -10 dB까지의 변화에 따른 상대오차를 Table 1에 나타내었다. 나머지 파라미터(펄스길이, 대역폭, 펄스 간 시작시간 차이)는 첫번째 시뮬레이션과 동일하게 설정하였다. 정합필터에 의한 이득은 이고, 입력 SNR이 증가함에 따라 출력 SNR도 거의 비례해서 증가한다. 시뮬레이션 결과를 살펴보니 업-다운 스윕의 경우에는 약 5.5 % ~ 5.8 %이고, 다운-업 스윕의 경우에는 약 -5.7 % ~ -5.6 %로 거의 일정하다. 따라서 수중물체가 탐지되면 시선속도 추정 성능의 차이는 거의 없다고 할 수 있다.
V. 결 론
본 연구에서는 상반된 스윕방향의 두 대역 HFM 펄스를 이용한 수중물체의 시선속도 추정에 관한 이론을 도출하였고, 이에 대한 시뮬레이션을 통하여 시선속도 추정 성능을 살펴보았다. 펄스길이와 대역폭은 1 s와 400 Hz이고 펄스 간 시작시간 차이가 1 s 일 때, 수중물체 시선속도를 15 m/s까지 증가시키면 최대 상대오차의 절대값은 6 % 정도이고, 수중물체 시선속도는 5 kts로 고정시키고 두 HFM 펄스 간 시간 차이를 증가시키면 상대오차는 급격히 증가하여 최대 40 % 정도까지 증가한다. 또한 SNR 변화에 따른 상대오차는 수중물체가 탐지되면 거의 동일하므로 속도 추정 성능은 유사하다. 따라서 상반된 스윕방향의 두 대역 HFM 펄스를 이용하여 수중물체의 시선속도를 추정하면 6 %의 오차로 최대 15 m/s의 표적 시선속도 추정이 가능하다는 것을 시뮬레이션을 통하여 확인하였다.
