

I. 서 론
II. 위치 추정 알고리즘
2.1 도플러 효과
2.2 도플러 중심(t0,f0) 찾기
2.3 최단접근점 찾기
2.4 소음원 좌표 찾기
2.4.1 소음원 좌표 구하기
2.4.2 소음원 좌표 구하기
III. 위치 추정 시뮬레이션
3.1 시뮬레이션 환경
3.2 도플러 신호 생성 및 최대값 추출
3.3 소음원의 위치 구하기
IV. 결 론
I. 서 론
과거 수중에서 움직이는 물체의 내부 소음원을 찾는 연구로는 일정한 속도로 움직이는 물체의 위치를 배열을 이용하여 높은 공간 분해능을 갖도록 추정하는 연구,[1-3] 도플러 효과를 이용하여 1차원상,[4] 2차원상[5]에 위치한 소음원의 위치를 구하는 연구가 있었다.
본 연구주제인 도플러 효과로 소음원 위치 추정과 관련한 연구에 대해 살펴보면 다음과 같다. Xu et al.[4]은 1차원 상에 위치한 소음원을 하나의 수중청음기와 하나의 신호발생기로 찾는 방법을 제시하였다. 일정한 속도로 운행하고 있을 때 각각의 소음원과 신호발생기의 도플러 중심에서의 시간차를 이용하여 일직선상에 위치한 상대적인 거리로서 소음원을 찾게 된다. 그리고 Kim[5]은 2차원 상에 위치한 소음원을 각기 다른 일정한 속도로 왕복 운행하였을 때 하나의 수중청음기와 하나의 신호발생기로 찾는 방법을 도플러 중심에서의 시간차를 통해 제시하였다. 전자는 소음원과 신호발생기가 1차원 위치라는 조건 때문에 배의 진행경로 위에 놓이게 되는데 수중청음기로부터 떨어진 거리가 같게 되어 최단접근점은 고정값이 된다. 후자는 이러한 최단접근점이 달라짐을 오로지 도플러 중심의 시간차로 해결하고자 하였으나 어떻게 도플러 중심을 찾는지는 언급이 되어 있지 않고 알고 있는 상태라 가정하였다. 실제 해상상태의 소음원은 일반적으로 3차원 공간에 위치해 있기 때문에 앞선 연구들로 찾는 것에 많은 제약이 있었으며 위치를 추정하기 위해서는 여러 개의 수중청음기가 필요하게 된다. 본 연구에서는 신호발생기 한 개와 두 개의 수중청음기를 가지고, 수중소음원이 각기 다른 속도로 왕복 운행한다고 가정하였을 때, 도플러 효과를 기반으로 위치를 추정하는 기법을 제안한다. 위치 추정을 하는 알고리즘의 주된 원리는 도플러 효과를 확인할 수 있는 스펙트로그램에서 최소자승법 이용하여 도플러 변이가 일어나는 지점 을 찾는 것과 최단접근점을 찾는 것이다. 3차원 시뮬레이션 결과를 통해 본 연구에서 제시한 위치 추정 알고리즘의 타당성을 확인하였다.
을 찾는 것과 최단접근점을 찾는 것이다. 3차원 시뮬레이션 결과를 통해 본 연구에서 제시한 위치 추정 알고리즘의 타당성을 확인하였다.
II. 위치 추정 알고리즘
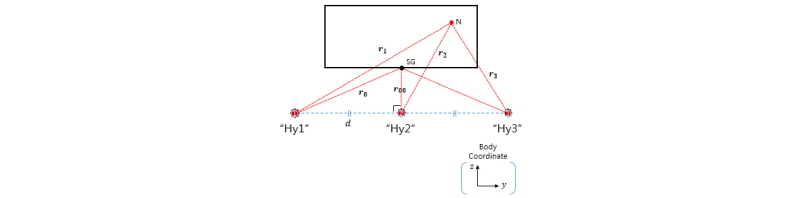
도플러 효과를 기반으로한 내부 소음원의 위치 추정을 위한 환경은 Fig. 1과 같다. 기준이 되는 신호발생기(Signal Generator, SG)를 선수쪽 배 하단 면에, 소음원은 Fig. 1과 같이 운항체의 내부에 위치해 있다고 가정 하였다. 이때 수중청음기 Hy2는 왕복하여 이동하고 있는 배의 신호발생기 경로의 수직선상 아래  만큼 떨어진 곳에 배치를 하고 나머지 하나 수중청음기 Hy1은 수평선상에
만큼 떨어진 곳에 배치를 하고 나머지 하나 수중청음기 Hy1은 수평선상에  만큼 떨어진 곳에 놓는다.
만큼 떨어진 곳에 놓는다.
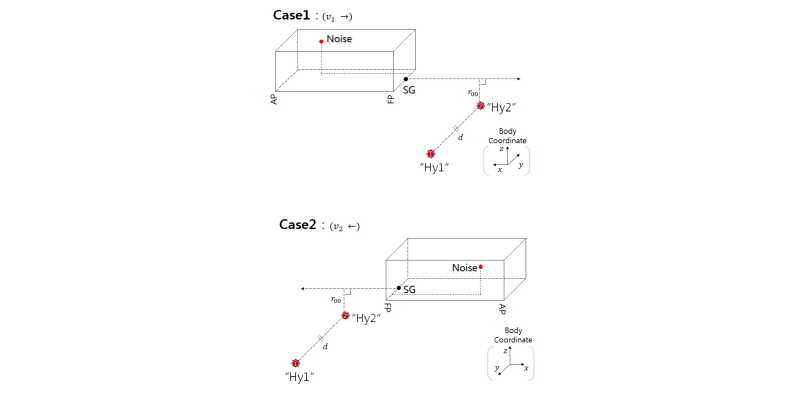
소음원의 위치를 추정하기 위해 Fig. 1과 같이 왕복 운행을 하면서 두 개의 수중청음기에서 신호를 계측한다. Fig. 1의 Case1은 Hy1이 물체좌표계에서  방향에 위치한 상태에서
방향에 위치한 상태에서  의 속도로
의 속도로  방향으로 등속도로 운행하는 상황이고 Case2는 Hy1이 물체좌표계에서
방향으로 등속도로 운행하는 상황이고 Case2는 Hy1이 물체좌표계에서  방향에 위치한 상태에서
방향에 위치한 상태에서  의 속도로
의 속도로  방향으로 등속도 운행을 하는 상황이다. 위와 같은 조건을 부여함으로써 두 개로 한정되어 있는 수중청음기의 정보를 두 배로 늘릴 수 있게 된다.
방향으로 등속도 운행을 하는 상황이다. 위와 같은 조건을 부여함으로써 두 개로 한정되어 있는 수중청음기의 정보를 두 배로 늘릴 수 있게 된다.
다음의 소절에서는 위와 같은 조건하에서 소음원의 위치를 추정하는 알고리즘에 대해 설명하겠다. 2.1절에서는 본 연구의 배경이론인 등속도로 움직이는 파원에 대하여 발생하는 도플러 효과에 대해 설명하고, 2.2절과 2.3절에서는 각각 도플러 중심 을 찾기 방법과 최단접근점
을 찾기 방법과 최단접근점 을 탐색하는 방법을 서술하였다. 2.4절에서는 앞에 정보를 이용하여 소음원의 좌표를 찾는 방법을 제안하였다.
을 탐색하는 방법을 서술하였다. 2.4절에서는 앞에 정보를 이용하여 소음원의 좌표를 찾는 방법을 제안하였다.
2.1 도플러 효과
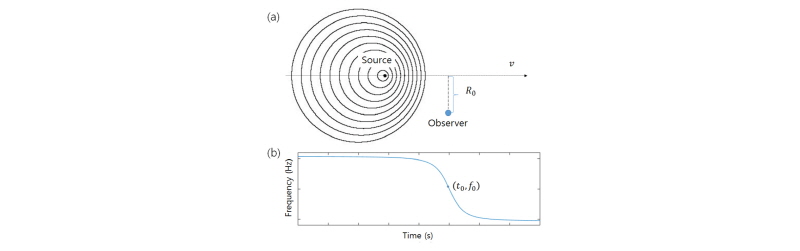
움직이는 하나의 파원과 하나의 고정된 관찰자가 있다고 하면 이 때 등속도  로 이동하는 파원과 고정된 관찰자의 위치가 가장 짧은 거리가 되는 지점은 Fig. 2(a)와 같이
로 이동하는 파원과 고정된 관찰자의 위치가 가장 짧은 거리가 되는 지점은 Fig. 2(a)와 같이  로 나타낼 수 있는데 시간에 따라 변화하는 주파수를 식[4]으로 나타내면 다음과 같다.
로 나타낼 수 있는데 시간에 따라 변화하는 주파수를 식[4]으로 나타내면 다음과 같다.
 and single frequency
and single frequency  , at a fixed observer, (b) time- frequency plot of measured acoustic signal at a fixed observer position.
, at a fixed observer, (b) time- frequency plot of measured acoustic signal at a fixed observer position.
 (1)
(1)
이때  는 음속이며,
는 음속이며,  는 도플러 변이가 일어나는 시간과 주파수를 나타내는 도플러 중심이다.
는 도플러 변이가 일어나는 시간과 주파수를 나타내는 도플러 중심이다.
Fig. 2(b)는 Eq.(1)을 바탕으로 시간에 따라 변화하는 주파수를 그린 그래프로서 그래프 형상에 영향을 미치는 변수로는  ,
,  ,
,  ,
,  가 있다. 본 연구에서 위치 추정 알고리즘은
가 있다. 본 연구에서 위치 추정 알고리즘은  는 알고 있다고 가정하고
는 알고 있다고 가정하고  ,
,  ,
,  를 찾는 것이다.
를 찾는 것이다.
2.2 도플러 중심 찾기
찾기
최소자승법을 이용하여 도플러 중심을 찾기 위해서는 먼저 탐색범위를 설정해야 한다. 수중에서 배의 소음 주파수[6]는 약 10 Hz에서 약 10,000 Hz까지 걸쳐있다. 도플러 효과를 나타내는 Eq.(1)에서 최단접근점  와 운행 중인 배의 속도
와 운행 중인 배의 속도  는 실험환경에서 다양하게 변경 시킬 수 있는 변수이다. 이때 Eq. (1)을 통해 도플러 효과로 인하여 생긴 주파수의 최대/최소의 차이는 Eq.(2)로 표현할 수 있다.
는 실험환경에서 다양하게 변경 시킬 수 있는 변수이다. 이때 Eq. (1)을 통해 도플러 효과로 인하여 생긴 주파수의 최대/최소의 차이는 Eq.(2)로 표현할 수 있다.
 . (2)
. (2)
Fig. 3은 배의 속도를 8 m/s로 두었을 때 Eq.(2)를 통해 10 Hz에서 10,000 Hz까지 도플러 효과로 인해 변화 한 최대 주파수와 최소 주파수의 차이를 나타낸 그래프이다.
|
Fig. 3. The maximum difference of frequency based on Doppler effect when the center frequency is from 10 Hz to 10,000 Hz. |
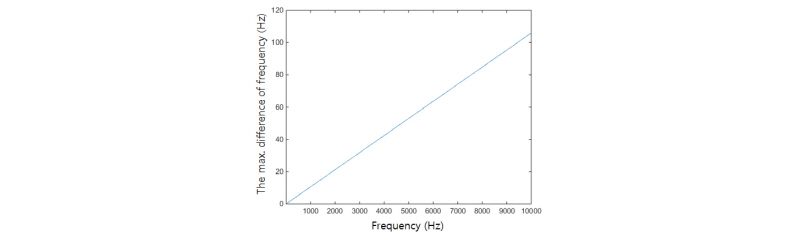
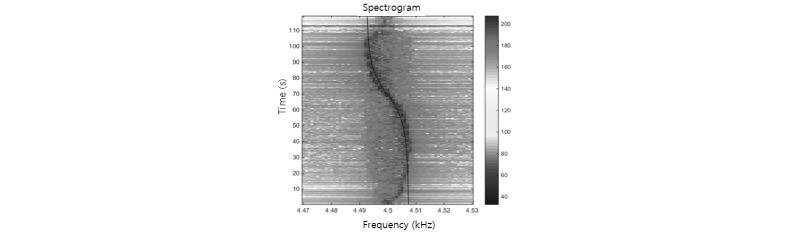
Fig. 3에서 보면 도플러 효과로 인하여 생긴 주파수의 최대, 최소의 차이는 약 120 Hz 이내임을 알 수 있고, 주파수가 변화하는 시간은 실험환경에서의 최단접근점과 배의 속도로 결정되는데 Fig. 4를 보면 약 40 s안에 주파수가 변화하는 것을 알 수 있다. 위의 결과를 통해 초기 탐색범위는 시간은 50 s, 주파수는 120 Hz로 설정한다.
최소자승법으로 도플러 중심을 찾는 알고리즘은 Fig. 5(a)와 같다. 우선 설정된 초기탐색범위를 이산화 시킨다. 시간 구간은 등 간격으로 100개의 점으로 나누고, 주파수 구간은 200개의 점으로 분할한다. 총 20,000개의 시간, 주파수 쌍에 대해, 최소자승법을 이용해 ‘Eq.(1)과 측정값으로부터 얻은 자료의 차이’를 최소화하는 시간, 주파수 쌍을 구한다. 이를 1차 최적값이라 칭한다. 이후 1차 최적값을 중심으로 탐색범위를 재분할 한다. 시간과 주파수 구간은 동일하게 100개, 200개로 고정을 시키나, 각각의 간격을 직전간격의 80 %로 줄여서 최소자승법을 이용하여 재탐색을 진행한다. 이와 같은 과정을 반복하여 n-1차 최적값과 n차 최적값의 차이가 오차한계보다 작을 때, 해당 값을 도플러 중심으로 선택한다.
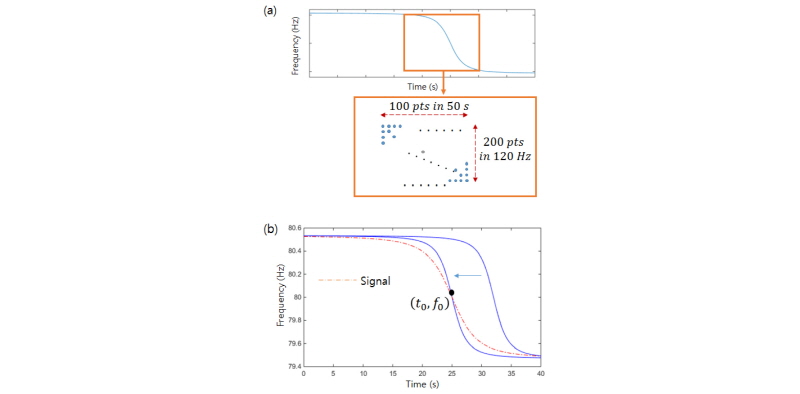
 . (a) A choice of searching domain, (b) Example of optimiza-tion process. The right solid line is a curve obtaining from 1st searching process and the left solid line is that from final searching process. The dash-dot line is a true curve.
. (a) A choice of searching domain, (b) Example of optimiza-tion process. The right solid line is a curve obtaining from 1st searching process and the left solid line is that from final searching process. The dash-dot line is a true curve.Fig. 5(b)는 위와 같은 알고리즘을 40번 시행했을때의 결과를 보여준다. 그림의 가장 우측에 있는 실선은 1차 탐색에서 얻어진 값이고, 좌측에 있는 실선은 최종 탐색에서 얻어진 값이다. 일점쇄선은 실제값을 보여준다. Fig. 5(b)에서 보면 도플러 중심 추정에 대한 알고리즘은 실제값을 잘 추정하는 것을 확인할 수 있으나, 그래프의 전체적인 모양은 서로 일치하지 않는다. 이는 도플러 중심은 최단접근점인  의 함수가 아니지만, 그래프의 전체 형상은
의 함수가 아니지만, 그래프의 전체 형상은  에 의존적이기 때문이다.
에 의존적이기 때문이다.
2.3 최단접근점 찾기
본 절에서는 최단접근점을 찾기 위한 알고리즘을 서술한다. 본 연구에서 가정한 실험조건에 의해 내부소음원과 수중청음기간의 최단접근점은 소음원과 Hy1, 소음원과 Hy2, 소음원과 Hy3 사이에 세 개가 존재한다. 이들 각각을  ,
,  ,
,  라 한다. 또한 신호발생기와 수중청음기간의 최단접근점도 존재한다. 신호발생기는 Hy2에 대해서 수직으로 놓여있으므로, Hy1과 Hy3에 대해서는 좌우 대칭의 형상이다. 그렇기 때문에 신호발생기와 Hy1과 신호발생기와 Hy3간의 최단접근점은 동일하다. 결국 이 경우에 최단 접근점은 두 개가 존재한다. 본 연구에서는 신호발생기가 Hy1과의 최단접근점은
라 한다. 또한 신호발생기와 수중청음기간의 최단접근점도 존재한다. 신호발생기는 Hy2에 대해서 수직으로 놓여있으므로, Hy1과 Hy3에 대해서는 좌우 대칭의 형상이다. 그렇기 때문에 신호발생기와 Hy1과 신호발생기와 Hy3간의 최단접근점은 동일하다. 결국 이 경우에 최단 접근점은 두 개가 존재한다. 본 연구에서는 신호발생기가 Hy1과의 최단접근점은  , 신호발생기와 Hy2의 최단접근점은
, 신호발생기와 Hy2의 최단접근점은  로 놓았다. Fig. 6은 y-z 평면상에 Fig. 1의 Case1과 Case2의 좌표계를 합해서 소음원의 위치, 신호발생기의 위치, 각각의 수중청음기의 위치를 기하학적으로 표현을 한 것이다. 이때 Hy3은 Fig. 1의 Case2일 때 +y방향 쪽에 있는 수중청음기 Hy1을 뜻한다.
로 놓았다. Fig. 6은 y-z 평면상에 Fig. 1의 Case1과 Case2의 좌표계를 합해서 소음원의 위치, 신호발생기의 위치, 각각의 수중청음기의 위치를 기하학적으로 표현을 한 것이다. 이때 Hy3은 Fig. 1의 Case2일 때 +y방향 쪽에 있는 수중청음기 Hy1을 뜻한다.
Fig. 6의 5개의 최단접근점에 대한 탐색은 2.2절에서 서술한 최소자승법 알고리즘을 이용한다. 각각의 최단접근점에 대한 구간을 설정하여 처음에는 성기게 최적점 탐색을 수행하고, 이후 간격을 줄여가며 세밀하게 최적점 탐색을 수행한다.
2.4 소음원 좌표 찾기
2.4.1 소음원  좌표
좌표  구하기
구하기
Table 1은 왕복 운행하여 두 가지 경우의 신호를 받은 수중청음기 Hy2에 대한 스펙트로그램 분석이다. 먼저 수중청음기에서 받은 신호의 수신 시간(receiving time to hydrophone)과 최단접근점이 되었을 경우의 시간과는 배의 진행경로와 수중청음기 사이의 거리에 따른 신호 전달 시간이 존재하기에 물속에서의 음속  m/s을 고려하여 위와 같이 수식적으로 쓸 수 있다.
m/s을 고려하여 위와 같이 수식적으로 쓸 수 있다.
Table 1. Spectrogram analysis. | ||||
“Hy2” | Case 1 | Case 2 | ||
SG | Noise | SG | Noise | |
CPA time |
|
|
|
|
Receiving time to Hydrophone ( = Doppler center) |
|
|
|
|
Spectrogram analysis |
|
| ||








 . (3)
. (3)
 . (4)
. (4)
도플러 중심은 2.2절에서 설명한 방법으로 찾아내게 되고 스펙트로그램 분석항을 보면 등속도로 진행 중인 배에 대해 Eqs.(3)과 (4)로 나타 낼 수 있기에 Eq.(5)와 같이 소음원의  좌표를 구할 수 있게 된다.
좌표를 구할 수 있게 된다.
 . (5)
. (5)
2.4.2 소음원  좌표
좌표  구하기
구하기
앞서 2.3절에서는 Case 1에서  ,
,  ,
,  ,
,  을 Case 2에서
을 Case 2에서  ,
,  ,
,  ,
,  을 구할 수 있다. 구한 최단접근점들을 가지고 Fig. 6에서 소음원의
을 구할 수 있다. 구한 최단접근점들을 가지고 Fig. 6에서 소음원의  좌표와
좌표와  좌표를 구할 수 있다.
좌표를 구할 수 있다.
 , (6)
, (6)
 . (7)
. (7)
 . (8)
. (8)
먼저 Case 1의 수중청음기들에서 계측한 신호를 통해  ,
,  ,
,  ,
,  을 구한 다음 Eq.(6)을 통해 Eqs.(7), (8)과 같이 소음원의
을 구한 다음 Eq.(6)을 통해 Eqs.(7), (8)과 같이 소음원의  ,
,  좌표
좌표 를 구할 수 있다.
를 구할 수 있다.
 , (9)
, (9)
 . (10)
. (10)
 . (11)
. (11)
다음으로 Case 2의 수중청음기들에서 계측한 신호를 통해  ,
,  ,
,  ,
,  을 구한 다음 Eq.(9)를 통해 Eqs.(10), (11)과 같이 소음원의
을 구한 다음 Eq.(9)를 통해 Eqs.(10), (11)과 같이 소음원의  ,
,  좌표
좌표 를 구할 수 있다.
를 구할 수 있다.
 , (12)
, (12)
 , (13)
, (13)
 , (14)
, (14)
 . (15)
. (15)
마지막으로 Case 1과 Case 2의 수중청음기들에서 계측한  ,
,  ,
,  ,
,  을 구한 다음 Eqs.(12)와 (13)처럼 식을 만들 수가 있고 이 두 식의 연산을 통해 Eqs.(14), (15)와 같이 소음원의
을 구한 다음 Eqs.(12)와 (13)처럼 식을 만들 수가 있고 이 두 식의 연산을 통해 Eqs.(14), (15)와 같이 소음원의  ,
,  좌표
좌표 를 구할 수 있다.
를 구할 수 있다.
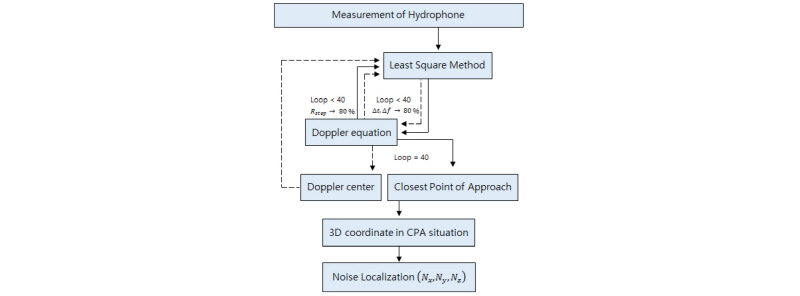
앞서 설명하였던 3차원 상에 존재하는 소음원을 도플러 효과를 이용하여 찾아보기 위한 위치 추정 알고리즘을 최종적으로 Fig. 7과 같이 정리할 수가 있다. 먼저 수중청음기에서 받아들인 신호와 도플러 식을 최소자승법을 이용하여 도플러 중심을 구하게 되는데 이때 시행하는 횟수가 40번이 될 때까지 시간간격  과 주파수간격
과 주파수간격  을 80 %로 점차 줄여가며 시행하여 찾아내었다. 구한 ‘도플러 중심’을 고정시키고 ‘보게 될 점 사이의 간격
을 80 %로 점차 줄여가며 시행하여 찾아내었다. 구한 ‘도플러 중심’을 고정시키고 ‘보게 될 점 사이의 간격  ’을 80 %로 줄여가며 최소자승법을 40번 수행한 결과 수중청음기와 파원(소음원과 신호발생기)사이의 최단접근점을 구할 수 있게 된다. 이와 같은 흐름으로 한 개의 신호발생기와 두 개의 수중청음기를 이용하여 위에서 구한 도플러 중심과 최단접근점을 바탕으로 3차원 상에 위치한 소음원의 위치를 추정하는 것을 제안하였다.
’을 80 %로 줄여가며 최소자승법을 40번 수행한 결과 수중청음기와 파원(소음원과 신호발생기)사이의 최단접근점을 구할 수 있게 된다. 이와 같은 흐름으로 한 개의 신호발생기와 두 개의 수중청음기를 이용하여 위에서 구한 도플러 중심과 최단접근점을 바탕으로 3차원 상에 위치한 소음원의 위치를 추정하는 것을 제안하였다.
III. 위치 추정 시뮬레이션
3.1 시뮬레이션 환경
II장에서는 소음원 위치 추정 알고리즘을 제시하였는데 이를 검증하기 위해 시뮬레이션을 Fig. 1과 같은 환경으로 진행하였다. 먼저 배의 크기가 30 m × 20 m × 10 m라 할 때 배 하단면 신호발생기는 80 Hz로 소음원은 120 Hz의 주파수를 내고 있으며 신호발생기를 기준으로 (20 m, 8 m, 6 m)에 위치해 있다고 가정하였다. 이때 수중청음기 Hy2의 위치인  는 10 m만큼 떨어진 곳에 배치를 하고 다른 수중청음기 Hy1의 위치인
는 10 m만큼 떨어진 곳에 배치를 하고 다른 수중청음기 Hy1의 위치인  는 24 m만큼 떨어진 곳에 위치해 놓는다.
는 24 m만큼 떨어진 곳에 위치해 놓는다.
배의 속도와 관련하여 첫 번째 경우의  은 5 m/s의 등속도로 운행을 하고 두 번째 경우는
은 5 m/s의 등속도로 운행을 하고 두 번째 경우는  은 8 m/s의 등속도로 운행하고 있는 것으로 시뮬레이션을 설정하였다.
은 8 m/s의 등속도로 운행하고 있는 것으로 시뮬레이션을 설정하였다.
3.2 도플러 신호 생성 및 최대값 추출

 . (16)
. (16)
먼저 본 연구의 목표인 소음원의 위치를 찾기 위해 도플러 신호를 생성한다. 신호발생기의 주파수  와 소음원의 주파수
와 소음원의 주파수  , Eqs.(1)과 (16)을 바탕으로 신호대잡음비(Signal to Noise Ratio, SNR)가 100인 도플러 신호를 생성하였다.
, Eqs.(1)과 (16)을 바탕으로 신호대잡음비(Signal to Noise Ratio, SNR)가 100인 도플러 신호를 생성하였다.
위와 같이 만든 신호를 고속푸리에변환(Fast-Fourier Transform, FFT)을 적용하여 주파수 분석을 수행하였는데 모든 데이터를 사용하면 양이 많아져서 제대로 된 처리가 불가하고 처리 시간 또한 많이 걸리게 된다. 따라서 도플러 변이가 확연하게 일어난 부분을 보기 위해 최대 신호값들을 추출해야했다. 신호발생기는 중심 주파수가 80 Hz 였기에 70 Hz에서 90 Hz까지의 최대값을 찾았고 소음원은 중심 주파수가 120 Hz로 설정하였기에 110 Hz에서 130 Hz까지의 신호에서의 최대값을 찾았다.
3.3 소음원의 위치  구하기
구하기
위의 위치 추정 알고리즘에서 수중청음기 Hy2의 스펙트로그램 분석을 해본 결과 실제 값과 시뮬레이션 결과 값은 Tables 2와 3과 같이 나왔으며 2.3절을 통해 소음원의 위치를 신호발생기로부터 떨어진 거리로 추정해본 결과 찾고자 하는 소음원의 좌표가 (20 m, 8 m, 6 m)라고 하였을 때 Fig. 8과 Table 4와 같이 나옴을 알 수 있다.
Table 2. Spectrogram analysis (Case 1). | ||||
“Hy2”(Case1) | ②(true value) | ②(estimated value) | ||
SG | Noise | SG | Noise | |
CPA time |
|
|
|
|
Receiving time to hydrophone ( = Doppler center) |
|
|
|
|
Spectrogram analysis |
|
| ||










Table 3. Spectrogram analysis (Case 2). | ||||
“Hy2”(Case2) | ②(true value) | ②(estimated value) | ||
SG | Noise | SG | Noise | |
CPA time |
|
|
|
|
Receiving time to hydrophone ( = Doppler center) |
|
|
|
|
Spectrogram analysis |
|
| ||










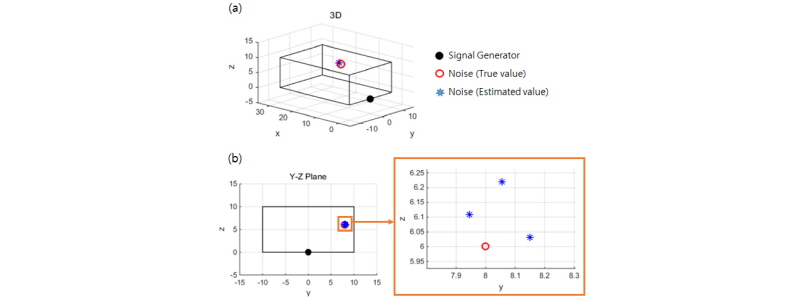
 plane result. The right figure shows the variation of estimated results for hydrophone choice.
plane result. The right figure shows the variation of estimated results for hydrophone choice.
 ,
, 

 ,
, 

 ,
, 

2.4.1절에서  는 Eq.(5)에서 구할 수 있고, 2.4.2절에서 Eqs.(6) ~ (15)을 통해
는 Eq.(5)에서 구할 수 있고, 2.4.2절에서 Eqs.(6) ~ (15)을 통해  는 3종류가 나옴을 확인할 수 있다. 따라서 Table 4의 소음원 위치 추정 결과값들
는 3종류가 나옴을 확인할 수 있다. 따라서 Table 4의 소음원 위치 추정 결과값들 은 총 3종류가 나온다.Type 1은 Case1에서 구한
은 총 3종류가 나온다.Type 1은 Case1에서 구한  와
와  , Type 2는 Case2에서 구한
, Type 2는 Case2에서 구한  와
와  , 그리고 Type 3은 Case1의
, 그리고 Type 3은 Case1의  과 Case2의
과 Case2의  을 이용하였다. 초기에 설정하였던 소음원의 위치(20 m, 8 m, 6 m)와 비교해 보았을 때 위치 추정 알고리즘을 통해 구한 소음원의 위치는 크게 벗어나지 않음을 확인 할 수 있다.
을 이용하였다. 초기에 설정하였던 소음원의 위치(20 m, 8 m, 6 m)와 비교해 보았을 때 위치 추정 알고리즘을 통해 구한 소음원의 위치는 크게 벗어나지 않음을 확인 할 수 있다.
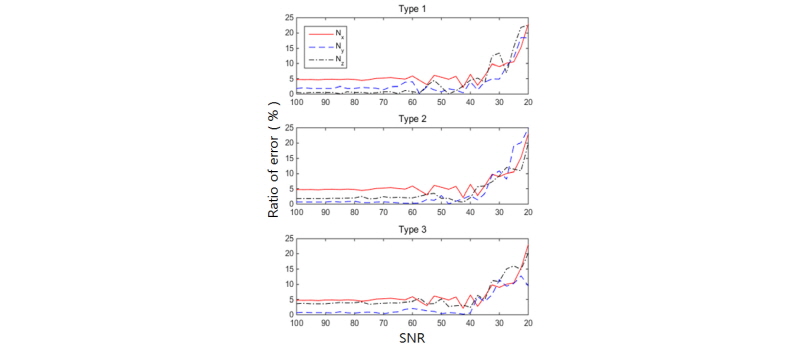
신호대잡음비를 100 dB에서 20 dB까지 2.5 dB간격으로 각각 Type별 위치 추정한 소음원 위치의 오차율은 Fig. 9와 같은 결과 값을 얻을 수 있다. 이 그래프들로 보아 신호대잡음비가 낮아질수록, 특히 40 dB 아래인 상황일수록 오차가 커지는 경향을 파악할 수가 있다.
IV. 결 론
일정한 속도로 주행하는 물체의 신호는 항상 도플러 효과가 있기에 이것을 기반으로 하여 3차원상에 위치한 소음원의 위치를 한 개의 신호발생기와 두 개의 수중청음기를 이용하여 추정하는 위치 추정 알고리즘을 제안하였다. 추정한 결과 신호발생기를 기준으로 소음원을 거의 정확하게 찾을 수 있었다.
본 연구에서는 소음원이 하나일 경우에 대하여 시뮬레이션을 하였는데 소음원이 여러 곳에 위치해 있어도 위치 추정 알고리즘은 서로의 소음원에 대해 각각 독립적으로 찾을 수 있기에 여러 소음원이 위치해 있어도 찾을 수 있을 것으로 판단된다. 그리고 해상에서 운행하는 배에서 발생하는 소음을 두 개의 수중청음기만을 이용하여 찾을 수 있다는 점에서 경제적으로도 이점이 있다고 판단된다.
Fig. 9에서 보면 신호대잡음비가 낮아지면 위치 추정 오차값이 커짐을 볼 수 있어 신호대잡음비가 굉장히 낮아지면 낮은 분해능이 논란이 될 수 있으나 본 연구는 운행상 발생하는 배에 있는 소음을 찾는 것이다. 그러므로 신호대잡음비가 낮아지는 상황에 있으면 해상 상태에서의 소음인 것인지 배 안에서 발생하는 소음인지 구별 되지 않기에 주변 소음으로 볼 수 있다. 그러므로 이 연구는 신호대잡음비가 매우 낮을 때는 고려하지 않았다.
위치 추정 알고리즘은 Fig. 1과 같이 수중청음기 하나 Hy2가 배의 진행방향의 수직선상 아래에 위치해 있을 때만 가능하였는데 이러한 제한조건은 추후에 개선해야 될 부분이라 생각된다.
