

I. 서 론
II. 감지 물리량에 따른 수동 소나센서 구조와 전후방 평면파 수신 특성
III. 소음원 파수별 음압장 및 입자가속도장의 이론적 비교
IV. 2차원 모델을 이용한 소음원 파수별 음압장 및 입자가속도장 비교
V. 수동 소나센서 감지 물리량에 따른 플랫폼 진동소음 수신 특성 비교
VI. 결 론
I. 서 론
수동 소나의 탐지성능은 표적 신호의 음원준위, 음파 전달손실, 배열이득, 소음준위 등에 의하여 결정된다.[1] 탐지성능 향상을 위하여 수동 소나센서 레벨에서 달성하고자 하는 주요 목표성능은 높은 배열이득과 낮은 소음준위이다. 배열이득을 높이는 것은 배열 센서의 크기, 채널 간 성능 편차 최소화, 빔포밍 기법 등을 통해 구현이 가능하며,[2,3] 낮은 소음준위는 소음원의 종류에 따라 적절한 기법들이 적용되어야 한다. 소음을 유발하는 소음원의 종류는 매우 다양한데, 파도나 조류, 해양생물 등에 의해 발생하는 해양 배경소음이 있으며 플랫폼 진동소음, 유동소음, 센서의 전기적 잡음 등 소나장비에서 자체적으로 생성되어 유입되는 자체소음이 있다. 각각의 소음원은 소나 탑재 플랫폼, 운용 조건, 주파수 대역, 주변 환경 등에 따라서 그 영향력이나 중요도가 상이하므로, 목표로 하는 소음원의 종류와 특성에 부합하는 적절한 저감 방안이 요구된다.
특히 선체에 부착되어 운용되는 선체부착형 수동 소나의 경우 플랫폼의 기계류 구동에 의한 저주파 대역의 진동소음이 자체소음 중에서 매우 지배적으로 나타나는 경우가 많으며, 해당 대역의 진동소음을 차단하는 것은 선체부착형 수동 소나센서의 주요 설계목표가 된다. 플랫폼 진동소음을 차단하기 위한 선체부착형 수동 소나센서는 일반적으로 해수와의 음향 임피던스 부정합을 위해 낮은 임피던스의 연질 차음 배플을 삽입하여 후면소음을 차단하는 설계 개념을 적용한다.[2,4,5] 수동 소나센서의 기본 소자로서 음압 감지식 하이드로폰을 적용하는 경우, 낮은 음향 임피던스의 차음 배플과 높은 음향 임피던스의 조절판으로 구성된 다층 구조를 하이드로폰의 후방에 위치시킨다. 이때 차음 배플에 의한 음압의 반사특성으로 인해 저주파 대역에서 전방 표적신호 수신 성능과 후면 진동소음 차단 성능이 저하되는 단점이 있다.[2,6] 이러한 음압 감지 방식의 단점을 보완하기 위하여, 음압과 반사특성이 반대로 나타나는 입자속도 또는 입자가속도를 감지하는 하이드로폰을 수동 소나센서에 적용하는 연구들이 수행되었다.[7,8,9,10,11,12] 입자속도 또는 입자가속도 감지형 하이드로폰이 적용된 수동 소나센서의 경우, 음압 감지형 하이드로폰이 적용된 것에 비하여 저주파 대역 수신 성능이 개선될 뿐만 아니라 조절판이 없어 무게가 매우 가볍다는 특징이 있다.
이러한 수동 소나센서들의 후면 진동소음 차단 성능을 나타내는 지표로는 전후방 감도 차이, 수중 진동민감도 등이 있다.[12,13] 전후방 감도 차이는 전방과 후방으로 입사하는 평면파에 대한 수신감도의 차이를 의미한다. 전후방 감도 차이가 높을수록 수동 소나센서가 후방으로 입사되는 소음에 비해 전방으로 입사하는 표적 신호를 더 민감하게 수신한다고 할 수 있다. 전후방 감도 차이는 통상적인 수신감도 시험 절차에 의해 측정되므로 비교적 간단하다. 하지만 이는 평면 입사파에 대한 특성이므로 실제 플랫폼 구조물에 장착된 조건에서 복잡하게 형성 및 전달되는 소음원의 특성을 대표한다고 보기는 어렵다. 반면에 수중 진동민감도는 플랫폼 구조물 진동에 대한 수동 소나센서의 응답을 의미한다. 수중 환경에서 플랫폼 모사 구조물에 수동 소나센서를 설치한 후 가진기로 구조물에 진동을 인가한다. 이때 구조물에 유발되는 가속도와, 그로 인해 야기되는 진동 유기소음에 대한 소나센서의 응답 특성으로부터 산출된다. 수중 진동민감도는 전후방 감도 차이에 비해 플랫폼을 포함한 실제 운용 환경과 비교적 유사한 조건에서 평가가 가능하다는 장점이 있다. 하지만 시험 복잡도가 높고, 플랫폼 모사 구조물의 진동모드 영향이 형상이나 재질 등에 따라 달라질 수 있어 표준화된 절차 수립이나 일반화된 성능 평가가 어려우며 공개된 연구 사례들도 많지 않다. 선체 굽힘파 유기소음에 대한 원론적이고 개념적인 연구[2,14]가 수행된 바 있으나, 실제 플랫폼의 진동소음은 세부적인 소음원 특성과 유체전달 및 구조전달 경로가 매우 다양하게 존재하므로 실질적인 분석이 쉽지 않다.
복잡다단한 플랫폼 진동소음 영향을 최소화하기 위해서는 소음의 발생과 전달에 관한 물리적인 분석과 다양한 소음원에 대한 비교가 필요하다. 또한 입자속도 또는 입자가속도와 음압과의 상관 관계가 평면파 진행 조건과는 달라질 것이기 때문에, 입자속도나 입자가속도와 같이 음압 이외의 물리량을 감지하는 하이드로폰에 대한 특성 분석도 동반되어야 한다.
이에 본 논문에서는 수동 소나센서의 후면 진동소음 민감도가 진동소음원의 종류와 감지 물리량에 따라 어떻게 달라지는지에 관하여 분석하고자 한다. 먼저 II장에서는 기존의 전후방 수직입사 평면파를 기준으로 감지 물리량에 따른 수동 소나센서 설계 구조와 전후방 수신감도 스펙트럼에 대하여 정리한다. III장에서는 구조물의 굽힘파 유기소음처럼 수직입사 평면파가 아닌 다양한 파수로 형성되는 소음원에 대하여 음압장과 입자가속도장 크기를 이론적으로 비교하고, IV장에서 2차원 유한요소모델 해석을 통해 이를 검증한다. V장에서는 음압 감지식 및 입자가속도 감지식 하이드로폰으로 구성된 수동 소나센서에 대하여 진동소음원의 종류에 따른 민감도를 3차원 유한요소해석을 통해 비교, 분석한다.
II. 감지 물리량에 따른 수동 소나센서 구조와 전후방 평면파 수신 특성
수동 소나센서는 대부분 전방과 후방에서 수직으로 입사하는 평면파를 기준으로 설계와 성능 평가가 이루어진다. II장에서는 감지 물리량에 따라 구분되는 두 종류의 수동 소나센서 배플 레이어 구조와 각각의 전후방 평면파 수신감도 스펙트럼 특징에 대하여 정리하고자 한다. 먼저 음압 감지 하이드로폰이 적용된 수동 소나센서의 일반적인 구조는 Fig. 1(a)와 같다. 다수의 하이드로폰들이 하나의 채널로 연결되어 있으며 음향창으로 수밀 몰딩된 구조이다. 후방에는 두 층의 배플 구조가 존재한다. 후면소음을 차단하기 위한 낮은 음향 임피던스의 차음 배플 층과 저주파 수신 성능 저하를 최소화하기 위한 높은 임피던스의 조절판 층으로 구성된다.
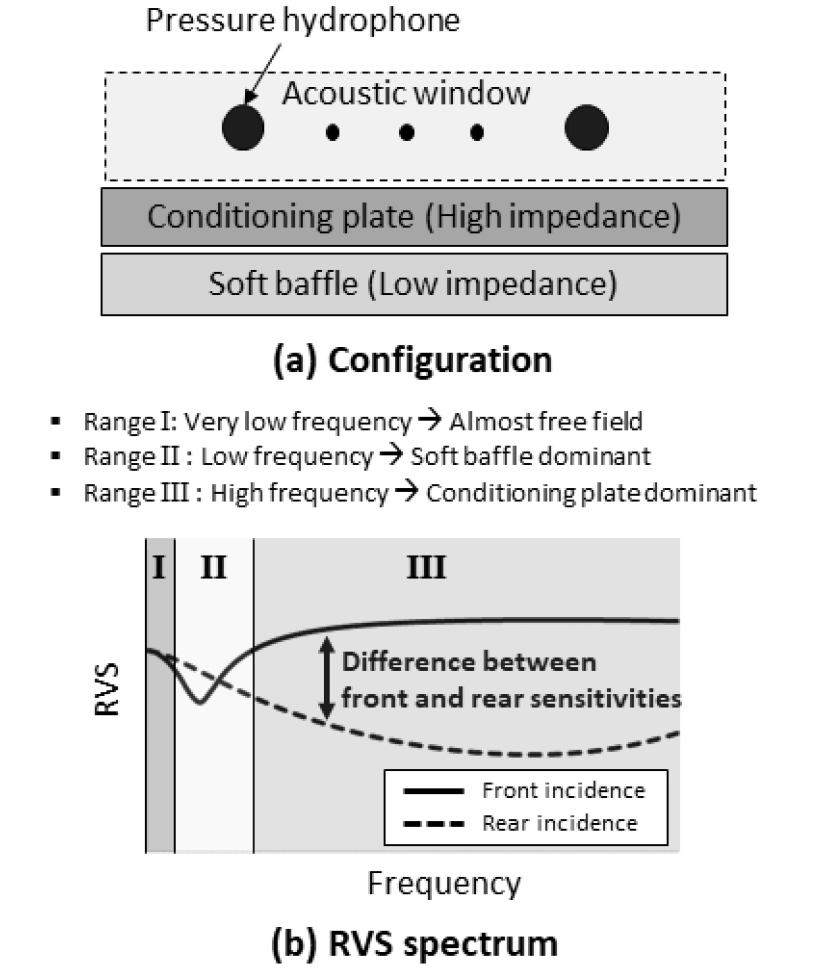
이러한 음압 감지식 수동 소나센서의 전후방 수신감도 스펙트럼은 전반적으로 Fig. 1(b)과 유사한 형태로 나타난다. Fig. 1(b)는 밀도 7800 kg/m3, 음속 5800 m/s, 두께 20 mm 스틸 재질의 조절판과 밀도 600 kg/m3, 음속 300 m/s, 두께 30 mm의 차음 배플이 무한평판 형태로 존재하는 1차원 가정 하에서, 조절판 전방으로 20 mm 이격된 지점에서의 음압 크기를 전압으로 환산한 수신 전압감도(Receiving Voltage Sensitivity, RVS)스펙트럼이다. 주파수와 관계없이 일정한 값의 음압–전압 변환 감도를 가정하여 환산하였다. 해석은 상용 유한요소해석 프로그램인 COMSOL Multiphysics의 1차원 모델을 사용하였다. 실선과 점선은 각각 전방과 후방에서 입사하는 평면파에 대한 수신감도이며, 전후방감도 차이는 전방 수신감도와 후방 수신감도의 차이로 정의된다. 높은 전후방 감도 차이는 후방 소음신호보다 전방 표적신호에 민감하다는 의미(평면파에 한하여)로 선체부착형 수동 소나센서의 중요한 성능 지수이다.
Fig. 1(b)의 영역 I, 즉 매우 낮은 주파수 대역에서는 파장 대비 배플의 두께가 매우 작아서 대부분의 음파가 투과되므로, 전방과 후방 수신감도 모두 하이드로폰 자체의 자유음장 수신감도와 유사하다. 영역 II에서는 음속이 낮아 파장 대비 두께가 큰 차음 배플에서의 반사 영향이 먼저 발현된다. 차음 배플은 해수 대비 음향 임피던스가 낮으므로 음압은 반대 위상으로 반사된다. 따라서 경계면에 가까이 위치한 음압 감지 하이드로폰의 전방 수신감도가 주파수에 따라 떨어졌다가 증가하는 널(null)이 발생한다. 후방 수신감도는 배플의 차음 효과에 의해 주파수에 따라 감소한다. 전방 수신감도에서 발생되는 널에 의해 후방 수신감도가 더 높아지는 감도 역전현상이 발생하는데, 수동 소나센서 관점에서 이는 전방 표적신호보다 후방 소음신호에 더 민감한 것을 의미한다. 특히 플랫폼 자체 진동소음은 저주파 대역에서 주로 발생하기 때문에 이러한 감도 역전현상은 수동 소나센서의 탐지성능을 저하시킨다. 영역 III에서는 음파의 반사가 조절판에서 지배적으로 나타난다. 이때 입사파와 반사파의 음압이 동일 위상으로 중첩되어 전방 수신감도가 증가한다. 후방 수신감도는 차음 배플 및 조절판의 임피던스 부정합 효과로 인해 감소하며 이로 인해 전후방 감도 차이는 증가한다.
입자가속도 감지식 수동 소나센서의 개략도는 Fig. 2(a)와 같으며 입자가속도 감지를 위한 가속도계가 음향창에 수밀 몰딩된 구조이다. 입자가속도는 보강, 상쇄 등의 반사 특성이 음압과 반대 경향으로 나타나며 조절판 없이 차음 배플만 필요하기 때문에 소나센서의 경량화가 가능하다. 입자가속도 감지 방식의 전후방 수신감도를 Fig. 1(b)와 동일한 방법으로 계산하면 Fig. 2(b)와 같은 개형으로 나타난다.
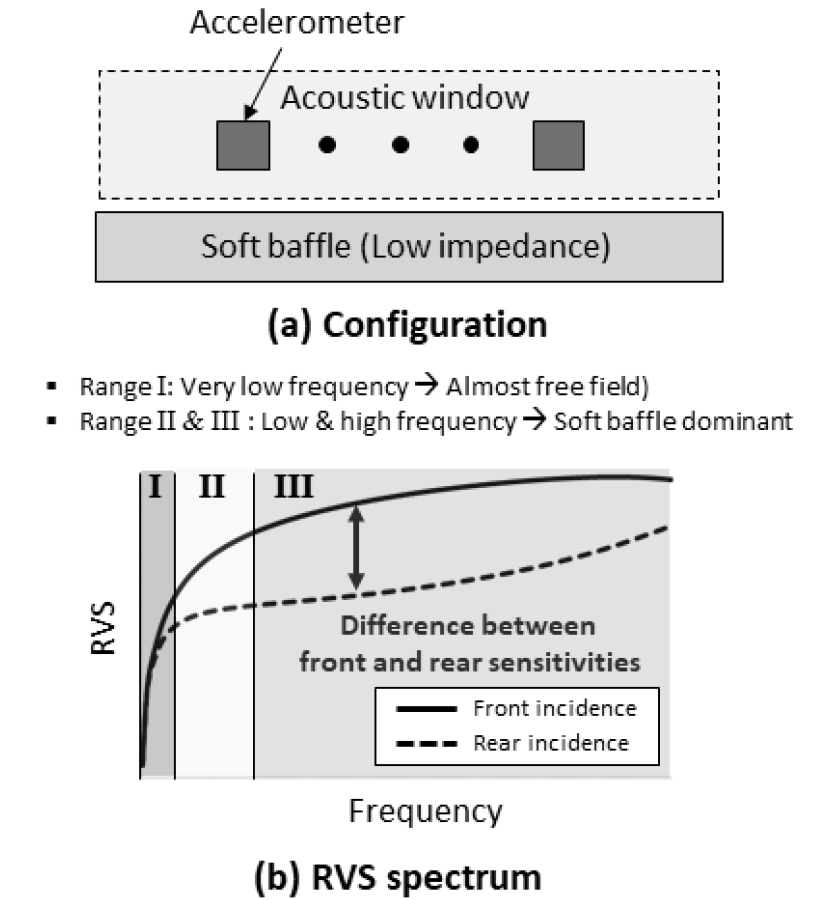
영역 I에서는 음압 감응식과 동일하게 대부분의 음파가 투과하기 때문에, 가속도계 자체의 자유음장 수신감도와 유사하여 전방과 후방 수신감도가 비슷한 값을 갖는다. 영역 II부터는 주파수가 증가함에 따라 점차 차음 배플의 반사 효과가 나타난다. 차음 배플은 해수 대비 임피던스가 낮으므로 반사파의 입자가속도가 입사파와 동일한 위상으로 발생한다. 따라서 반사면에 가까이 위치한 입자가속도 감지 하이드로폰의 전방 수신감도는 증가하게 되고, 후방 수신감도는 차음 효과에 의하여 전방 수신감도보다 낮아지면서 전후방 감도 차이가 증가한다. 입자가속도 감응식 소나센서는 조절판이 없으므로 음압 감응식 센서에서 구분되었던 영역 III의 특징이 나타나지는 않으며 전체적인 전방, 후방 수신감도가 고주파 대역으로 갈수록 증가하는 경향을 가진다. 입자가속도 감지 방식은 음압 감지 구조의 저주파 영역 II에서 나타나는 수신감도 널과 전후방 감도 역전 현상이 나타나지 않으며, 무거운 조절판이 없어지기 때문에 경량화 측면에서 유리하다는 이점이 있다.
III. 소음원 파수별 음압장 및 입자가속도장의 이론적 비교
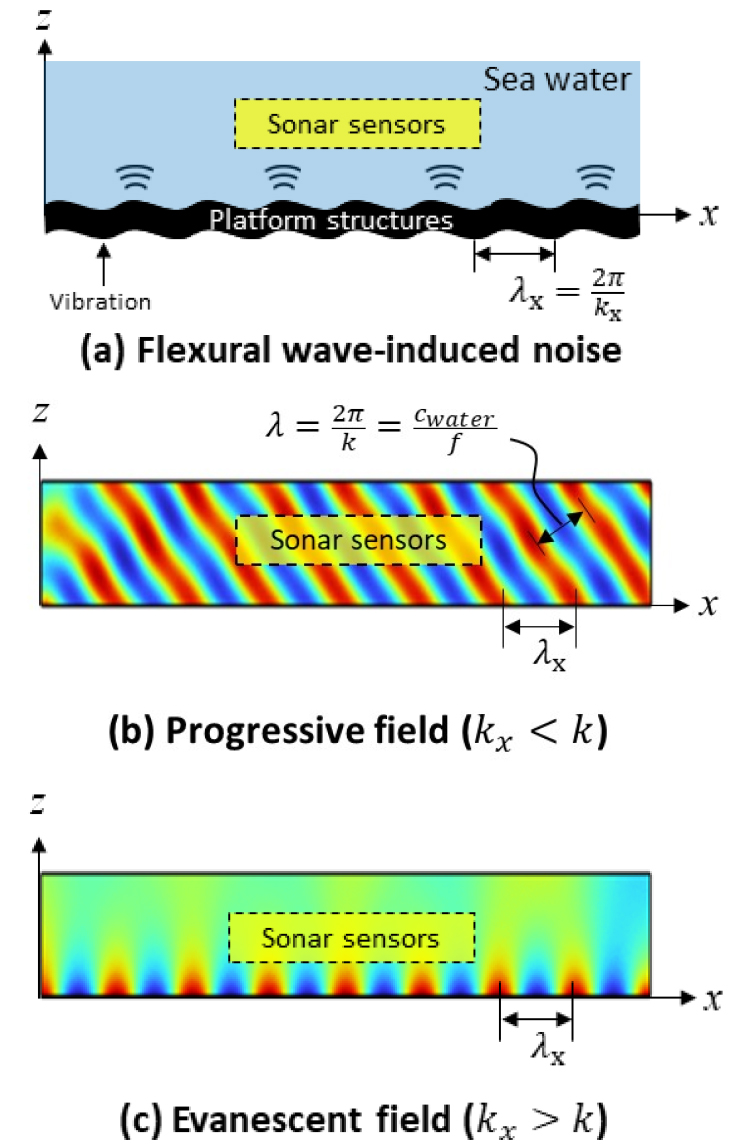
III장에서는 II장에서 언급된 수직입사 평면파와는 다른 형태로 전달되는 플랫폼 진동 유기소음이 수동 소나센서에 미치는 영향을 이론적 방법으로 분석하고자 한다. 플랫폼에 의한 진동 유기소음은 수직으로 입사되는 평면파보다 더 복잡한 형태로 나타난다. 특히 Fig. 3(a)에 도시된 것처럼 기계류 진동 등에 의하여 플랫폼 구조물에 굽힘파가 발생하면, 굽힘파가 인접한 음향 매질인 해수로 음파를 방사하고, 방사된 음파가 플랫폼에 근접한 소나센서로 도달하게 되는 굽힘파 유기소음이 발생한다. 구조물과 해수 간 경계면, 즉 Fig. 3(a)의 축에서의 소음원 파수는 구조–음향 연성 조건에 의하여 굽힘파의 파수 와 같으며, 굽힘파의 파장 와는 역수 관계이다. 음향 매질, 즉 해수 영역에서 음파의 파수 와 파장 𝜆 또한 서로 역수 관계이며 이는 주파수 와 음속 에 의해서 결정된다. 굽힘파 유기소음에 의해 형성되는 해수 매질의 음향장은 굽힘파의 파수 와 음파의 파수 간 대소 관계에 따라 Fig. 3(b)의 진행파와 Fig. 3(c)의 소멸파 두 가지 양상으로 나타난다.[15]
진행파와 소멸파 소음에 의해 형성되는 음압장과 입자가속도장의 비교를 통해 선체부착형 소나센서가 음압을 감지할 때와 입자가속도를 감지할 때 굽힘파 유기소음에 대한 수신 특성을 유추할 수 있다. 음압장을 도출하기 위한 주파수 영역 파동방정식 Helmholtz equation과 2차원 xz 평면좌표계에서의 일반해는 각각 다음과 같다.
는 음압, 는 복소 진폭, 𝜔는 각주파수, 와 는 각각 와 방향 파수를 나타내며 파수 와는 아래의 관계를 갖는다.
굽힘파 유기소음의 관점에서 는 축 상에 놓여진 굽힘파의 파수로 소음원 경계의 파수와 같으며 k는 굽힘파가 소음을 방사하는 매질, 즉 해수에서의 음파 파수이다.
소음원의 파수가 음파의 파수보다 작을 때, 즉 인 경우 음압장은 Eq. (2)와 같으며 Fig. 3(b)와 같이 방향으로 전파하는 진행파가 생성된다. 음압장 p로부터 입자가속도장 을 구하기 위하여, 소신호 가정(small-signal approximation) 하에서의 Euler equation을 주파수 영역에서 기술하면 아래의 Eq. (4)와 같이 나타낼 수 있다.
여기서 는 매질의 밀도이다. 방향 일축 입자가속도 감지 하이드로폰을 상정하여, Eqs. (2)와 (4)로부터 방향의 입자속도 와 입자가속도 를 구하면 아래와 같다.
일축 입자가속도 감지 방식과 음압 감지 방식의 상대적인 소음 민감도 비교를 위하여 음압 대비 방향 입자가속도의 크기 비율을 계산하면 다음과 같다.
진행파에서는 소음원의 파장 또는 파수 가 정해지면 매질로 전파되는 평면파의 각도와 입자가속도의 축 성분이 결정된다. 소음원의 파수 가 증가할수록 음파는 경계면의 수직 방향을 기준으로 점차 경사를 가지며 전파하게 되어 음압 대비 방향 입자가속도 성분의 크기가 점차 감소함을 알 수 있다. 후면소음 최소화가 목표인 수동 소나센서의 관점에서 보면 소음원 파수 가 커질수록, 즉 후면 경사입사 소음에 대하여 음압 감지 방식이 일축 입자가속도 감지 방식보다 진행파 소음을 더 민감하게 수신할 수 있음을 의미한다.
반대로 소음원의 파수 가 음파 파수 보다 커지게 되면, 즉 인 경우 Eq. (3)에서 가 되어 음압장은 다음과 같이 표현된다.
여기서 이며, Fig. 3(c)와 같이 방향으로는 전파되나 방향으로는 지수적으로 감쇠되는 소멸파가 생성된다. 소멸파에 대해서도 동일한 과정으로 음압 대비 방향 입자가속도의 크기 비를 구하면 다음과 같다.
소멸파 영역에서는 가 증가할수록, 즉 소음원의 공간적 구배가 조밀할수록 음압 대비 방향 입자가속도의 상대적 크기가 증가하게 된다. 이는 입자가속도 감지 방식이 음압 감지 방식보다 소멸파 영역에서 발생하는 후면소음을 더 민감하게 수신할 수 있음을 의미한다.
IV. 2차원 모델을 이용한 소음원 파수별 음압장 및 입자가속도장 비교
IV장에서는 III장의 이론적 분석 결과를 검증하기 위하여 Fig. 4와 같이 2차원 유한요소 모델에 대한 주파수 영역 해석을 수행하였다. 해석에는 COMSOL Multiphysics를 사용하였으며, 진행파와 소멸파의 영향을 정확하게 분석하기 위하여 양쪽 끝단에서의 경계조건 영향이 없는 이상적인 원형 모델을 구성하였다. 매질은 해수이고 최외곽 경계에서는 반사가 없도록 완전 정합 경계 조건을 설정하였다.
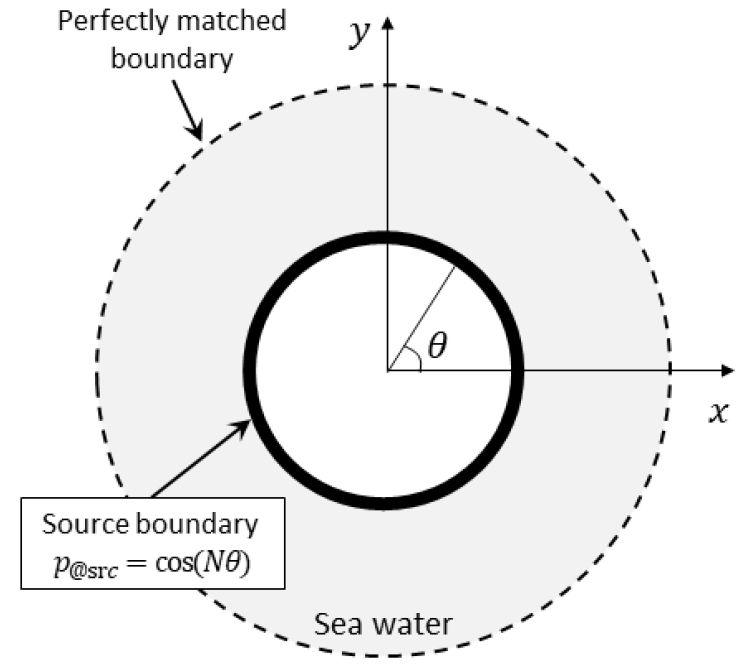
소음원의 파수에 따른 음향장만을 고려하기 위하여 구조물은 모델에 포함하지 않았으며, 다음과 같이 원주를 따라 존재하는 소음원 경계조건을 상정하였다.
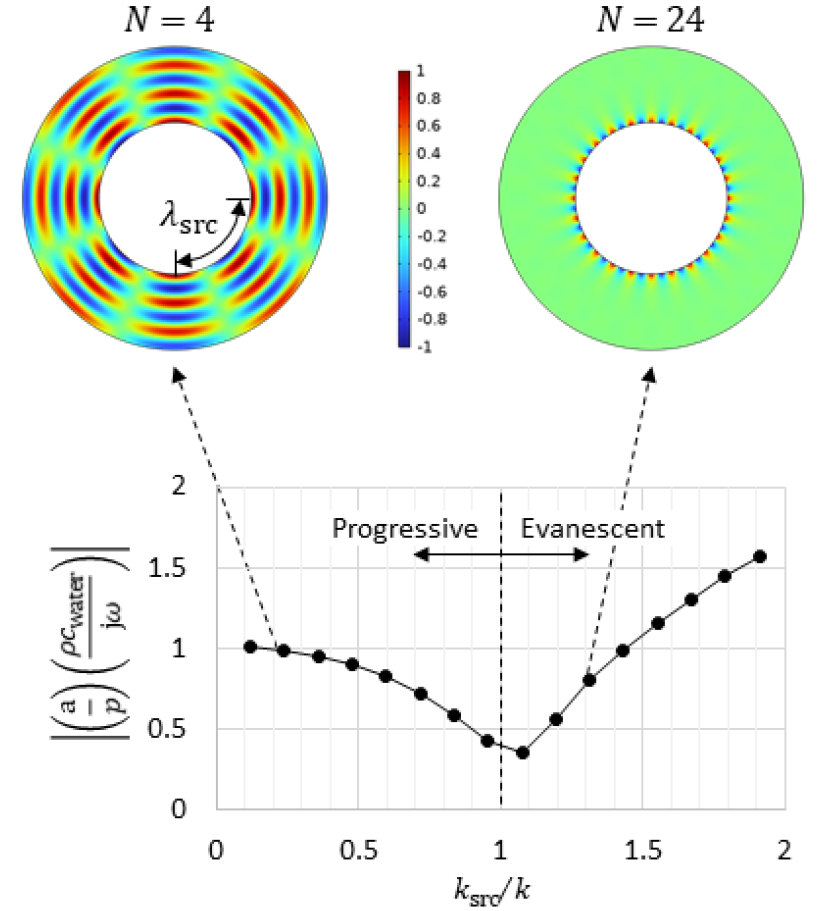
는 소음원 경계에서 음압의 복소 진폭, 𝜃는 소음원 경계의 위치별 각도이고, 은 원주상에 소음원이 몇 파장 존재하는지를 의미한다. 예를 들어 N= 4인 경우, Fig. 5의 좌상단 그림과 같이 원주를 따라 네 개 파장의 소음원이 정상파 형태로 존재하는 것이다. 원형 소음원 경계의 반지름은 R이고 주파수는 f0일 때 소음원 파장과 파수는 각각
이며, 음파의 파장과 파수는 각각
가 된다. 원주상의 소음원 파장 수 N을 2에서 42까지 증가하면서 해석을 수행하였으며, 이때 Eqs. (11), (12), (13), (14)를 통해 산출되는 , , 와 음파 파수 대비 상대적 소음원 파수 , 그리고 이에 따라 분류되는 음향장의 종류를 Table 1에 정리하였다.
Table 1.
The number of circumferential noise source wavelengths and the corresponding parameters used in the two dimensional model.
음파 파수 대비 소음원 파수의 상대적 크기에 따라 진행파와 소멸파 두 종류의 소음 형태를 확인할 수 있다. Fig. 5의 상단은 두 종류 소음에 대한 대표적인 음압 분포 예시를 나타낸다. 소음원 파수가 작으면 N=4에 해당하는 좌상단 그림과 같이 외부로 전파하는 진행파 소음이 발생하고, 소음원 파수가 크면 우상단의 N=24인 경우와 같이 전파하지 못하고 거리에 따라 지수적으로 감쇠되는 소멸파 소음이 발생하는 것이 확인된다.
소음원의 상대적 파수 에 따라 소음원 경계에서의 음압 대비 입자가속도의 상대적 크기를 계산하면 Fig. 5의 하단 그래프와 같다. 입자가속도는 수직방향 성분만 고려하였으며 음압과 동일한 단위에서 비교하기 위하여 해수의 임피던스 와 주파수 𝜔로 보상하였다. 진행파 영역에서는 파수 증가에 따라 음압 대비 입자가속도 크기가 감소하지만, 반대로 소멸파 영역에서는 파수 증가에 따라 음압 대비 입자가속도 크기가 증가하고 있다. 즉 진행파 소음에 둔감하기 위해서는 음압보다 입자가속도 감지식 센서가 유리한 반면에, 소멸파 소음에 대해서는 입자가속도보다는 음압 감지식 센서가 유리하다고 볼 수 있다. 이는 III장의 이론적 분석 결과와 일치한다.
V. 수동 소나센서 감지 물리량에 따른 플랫폼 진동소음 수신 특성 비교
플랫폼 구조물의 굽힘파 유기소음은 굽힘파의 파수에 따라서 진행파와 소멸파 소음으로 분류되고, 이에 따라 발생하는 음압장과 입자가속도장에 극명한 차이가 있다는 것을 이론적 분석 및 2차원 해석모델을 통해 확인하였다. V장에서는 실제와 더 유사한 조건에서 음압 및 입자가속도 감지 소나센서의 후면 진동소음 수신 특성을 비교해보고자 한다. 이를 위하여 플랫폼 구조물과 수동 소나센서 구조를 모두 포함하는 3차원 모델을 구성하여 후면 진동소음 민감도 해석을 수행하였으며, 플랫폼이 없는 후방 수직입사 평면파에 대한 수신 특성과 비교하였다.
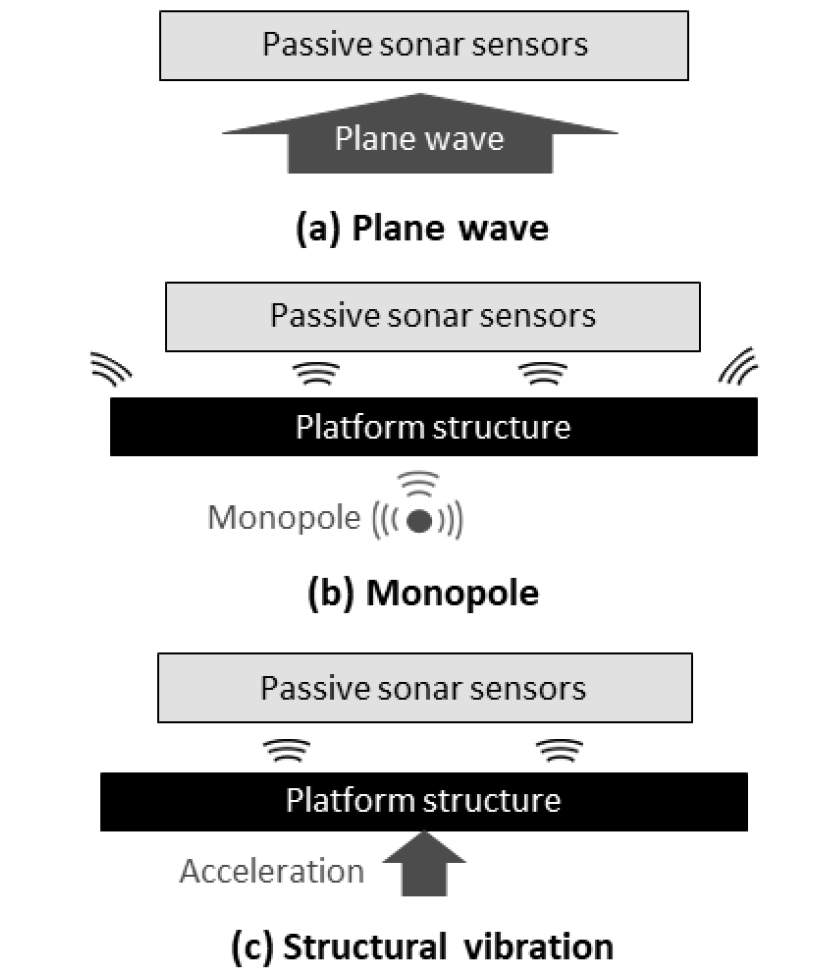
후면 진동소음은 다양한 조건을 고려하기 위하여 Fig. 6에 도시된 세 가지 종류로 선정하였다. 먼저 Fig. 6(a)의 평면파 소음원은 플랫폼 구조물 없이 후방에서 수직으로 들어오는 평면파에 대한 수동 소나센서의 민감도를 의미한다. 이는 현재 소나센서의 성능 평가에 적용되고 있는 후방 수신감도 시험 조건과 동일하다. 두 번째 경우는 Fig. 6(b)의 모노폴 소음원이며, 플랫폼 구조물이 존재하는 상황에서 후방의 진동소음이 소음원의 형태로 생성된 이후에 복합적인 경로로 소나센서까지 전달되는 조건을 모사하고자 하였다. 마지막은 Fig. 6(c)의 구조물 가진이며 플랫폼 구조물에 수직방향 가속도 경계조건을 주어 해석을 수행하였다. 이는 플랫폼 구조를 통해 기계류의 진동이 직접적으로 구조물을 가진하여 굽힘파가 발생하고, 굽힘파에 의해 유기된 소음이 센서까지 전달되는 진동 유기소음에 해당한다.
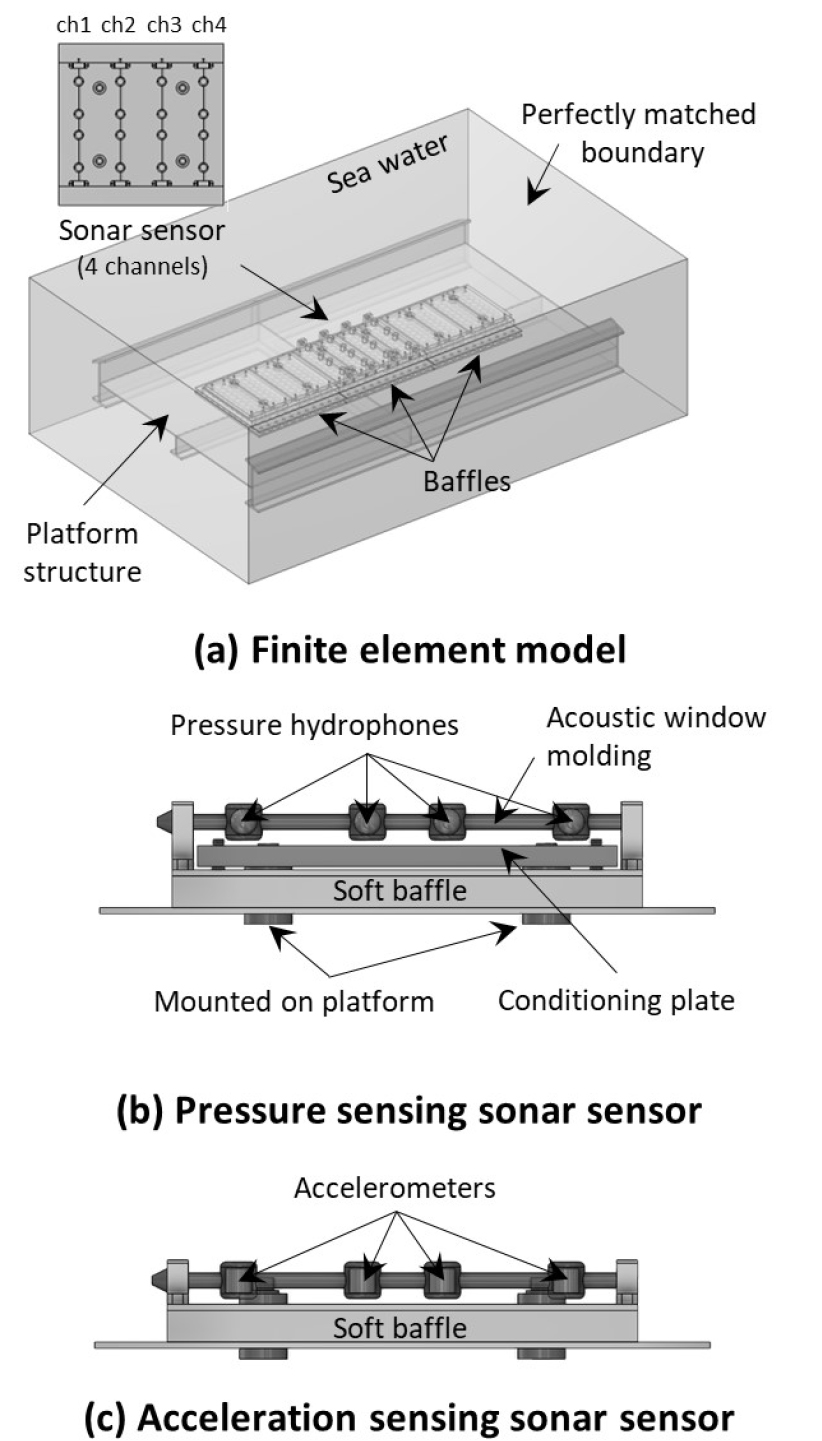
해석에 사용된 3차원 유한요소 모델은 Fig. 7(a)과 같다. 알루미늄 재질의 플랫폼 구조물에 3개의 배플 구조물이 수평으로 배열되어 있으며 모두 해수로 둘러싸인 구조를 가진다. 해수 영역의 최외곽에는 음파 반사가 발생하지 않도록 완전 정합 경계조건을 설정하였다. 가운데 배플 구조물에는 하이드로폰 배열 센서 4개 채널이 등간격으로 배치되어 있으며, 각각의 채널은 하이드로폰 4개가 병렬로 연결되어 수밀 몰딩된 구조를 갖는다. 세부적인 구조는 하이드로폰이 감지하는 물리량에 따라 Fig. 7(b), (c)와 같으며 이는 II장에서 언급한 수동 소나센서와 유사한 구조이다. 음압 감지식 소나센서는 무지향성의 음압 하이드로폰을 사용하고 후방에 조절판과 차음 배플이 위치한다. 입자가속도 감지식 소나센서는 일축 가속도계를 하이드로폰으로 사용하며 조절판 없이 음압 감지식과 동일한 차음 배플을 사용한다. 구조물 간 연결 조립 부위에는 댐핑 재료를 적용해 구조 진동의 직접적 전달을 최소화하였다.
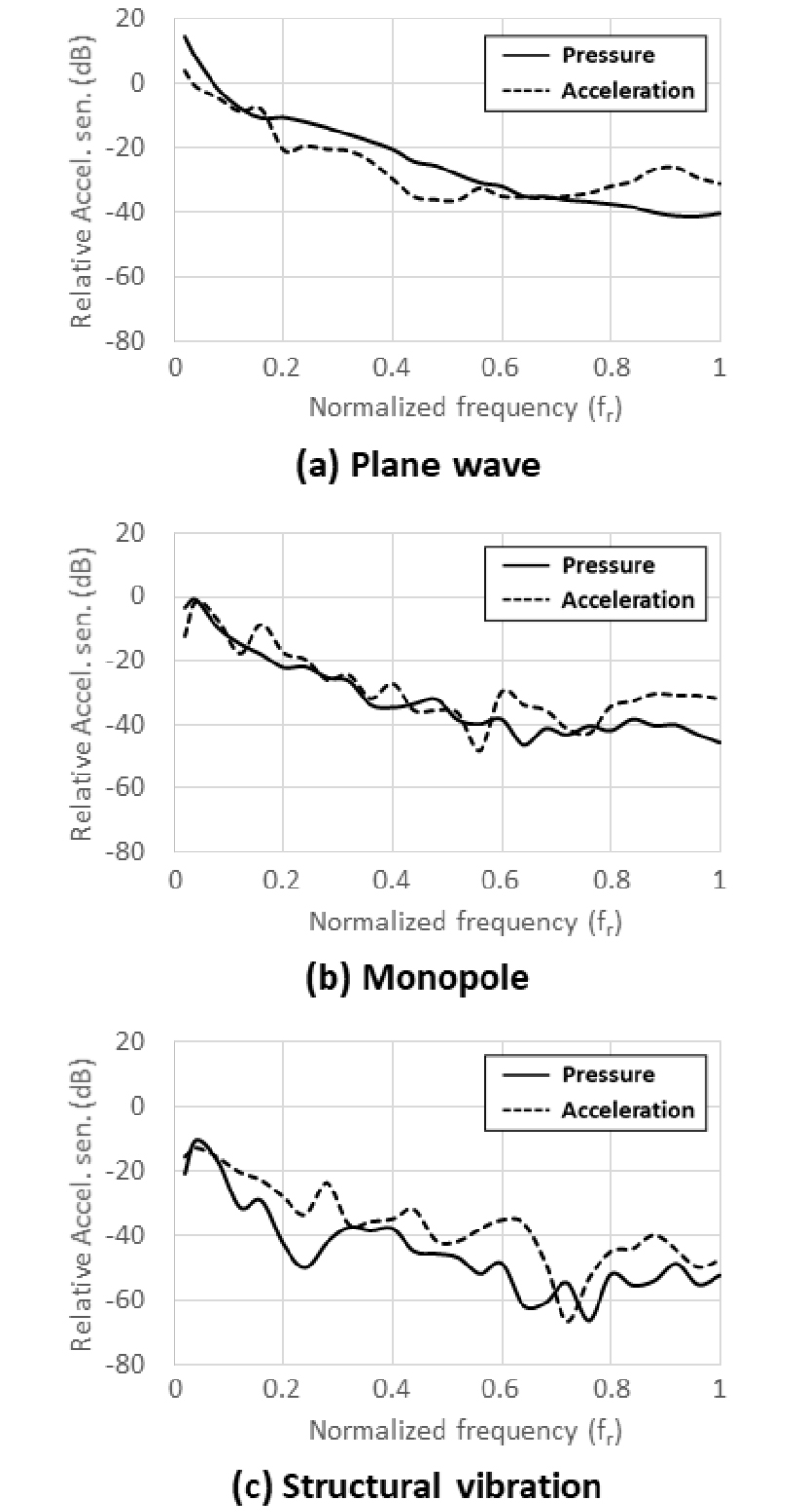
세 가지 진동소음원 종류별로 유한요소해석을 통해 산출된 음압 감지식과 입자가속도 감지식 수동 소나센서의 후면 진동소음 민감도를 Fig. 8에 비교하였다. 채널의 위치에 따른 민감도 변화는 전체적인 결론을 도출함에 있어 큰 차이가 없었기 때문에 중앙에 위치된 두 번째 채널의 결과만 나타내었다. 실선은 음압 감지식, 점선은 입자가속도 감지식 소나센서의 민감도이다. 가로축은 진동소음원의 주파수이고, 세로축은 가속도 감도로서 수동 소나센서의 후면 진동소음 민감도를 비교할 수 있는 지표이다. 주파수는 수동 소나센서의 최대 수신주파수 값으로 정규화하여 나타내었고, 가속도 감도는 산출된 수동 소나센서의 수신전압 크기를 진동소음원의 가속도 크기로 나눔으로써 계산된다. 여기서 가속도 크기 값은 진동소음원의 종류별로 다르게 산출되는데, 구조물이 없는 Fig. 7(a)의 후방 평면파 소음원의 경우는 아래의 Eq. (15)으로 산출되는 평면파의 입자가속도 크기 A를 진동소음원의 가속도 값으로 정의하였다.
는 후방 입사파의 음압 크기이고 는 해수의 음향임피던스로 1.5 Mrayls을 적용하였다. 플랫폼 구조를 포함하는 Fig. 6(b)의 모노폴 소음원과 Fig. 6(c)의 구조물 가진의 경우, 아래의 Eq. (16)와 같이 구조물 표면에서 법선방향 가속도 크기 의 면평균 값을 진동소음원의 가속도 크기 값으로 정의하였다.
Fig. 8(a)와 (c), 즉 평면파 소음원과 플랫폼 구조 유기소음에 대한 음압과 입자가속도 감지식 센서의 가속도 감도를 비교해보면 경향이 서로 다름을 알 수 있다. Fig. 8(a)의 평면파 소음원에서는 정규화 주파수 0.6 이하 저주파 대역에서 입자가속도 감지 소나센서의 가속도 감도가 음압 감지 소나센서보다 더 낮게 나타나지만, Fig. 8(c)의 구조물 가진의 경우에는 입자가속도 감지 소나센서의 가속도 감도가 더 높게 나타난다. 이러한 차이는 앞서 이론 및 2차원 모델을 통해 확인된 진행파와 소멸파에 대한 음압장과 입자가속도장의 차이에 기인하는 것으로 볼 수 있다. 평면파 소음원은 완전한 진행파이지만, 구조물 가진의 경우 대부분의 굽힘파 유기소음이 소멸파의 형태로 발생하기 때문에 입자가속도 감지식 소나센서가 더 높은 후방 진동소음 민감도를 보이게 된다. 플랫폼의 굽힘파 유기소음이 소멸파의 형태로 나타나는 것은 Fig. 9를 통해 확인할 수 있다. 두 그림은 각각 정규화 주파수 이 0.1과 1일 때 구조 가진에 대한 플랫폼 변형 해석 결과를 나타내는데, 두 주파수에서 모두 굽힘파가 공간적으로 조밀하게 나타나 음파의 파장에 비해 굽힘파 파장이 매우 작음을 알 수 있다. 즉 음파의 파수보다 굽힘파의 파수가 훨씬 크기 때문에 소멸파 소음이 지배적으로 나타나며, 이로 인해 입자가속도 감지식 소나센서가 구조 가진에 더 민감한 특성을 갖게 된다.
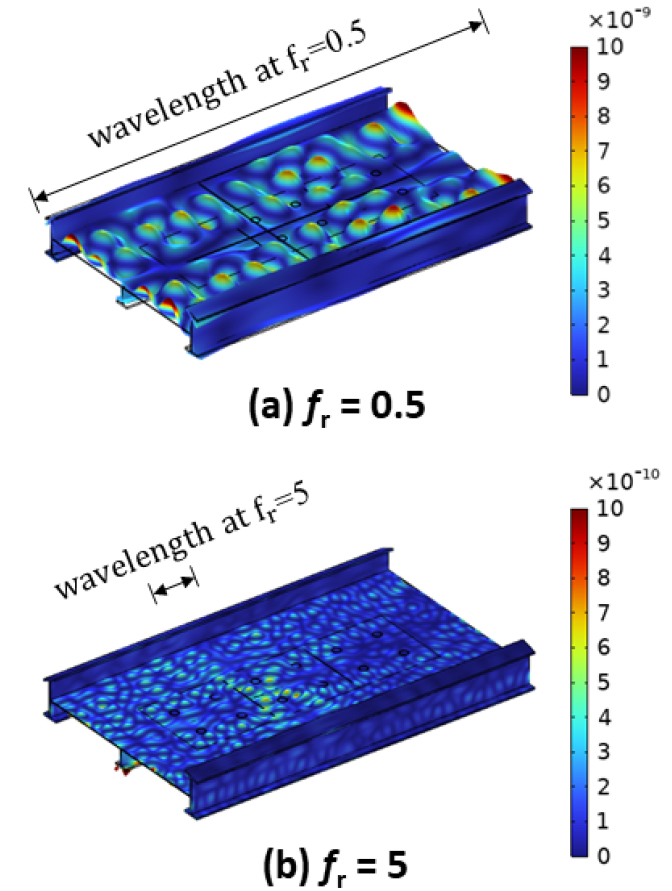
Fig. 8(b)의 모노폴 소음원에서는 음압과 입자가속도 감지 방식이 서로 유사한 수준의 가속도 감도를 보이는데, 이는 모노폴이 진행파와 소멸파 두 가지를 모두 유발하는 소음원이기 때문이다. 음원이 직접 플랫폼 구조를 투과하거나 회절을 통해 진행파의 형태로 전달되는 경로도 있지만, 음파가 플랫폼 구조를 가진하여 굽힘파가 발생하고, 굽힘파가 다시 음파를 방사하는 굽힘파 유기소음이 소멸파의 형태로 전달되는 경로가 동시에 존재한다. 따라서 모노폴 소음원은 Fig. 8(a)의 평면파 소음원과 Fig. 8(c)의 구조 가진 특성을 모두 갖기 때문에 음압 감지와 입자가속도 감지가 유사한 값을 가진다고 볼 수 있다.
플랫폼 구조물을 포함하는 3차원 모델에 대해서 진동소음원 종류에 따라 음압과 입자가속도 감지 방식이 서로 다른 민감도 특성을 가지는 것을 확인하였다. 진동소음원의 종류는 플랫폼의 형상, 재질, 내부 구조, 운용조건 등에 따라 다양하게 나타날 것이다. 따라서 후면 진동소음 저감 측면에서 적절한 하이드로폰의 감지 물리량과 그에 따른 소나센서 구조를 선정하기 위해서는 플랫폼의 진동소음 발생 양상을 파악하는 것이 상당히 중요하다고 할 수 있다.
VI. 결 론
본 논문에서는 수동 소나센서의 감지 물리량(음압 또는 입자가속도)에 따른 플랫폼 진동소음원 종류별 수신 특성을 분석하였다. 기존에 고려되어 왔던 수직입사 평면파 조건 외에도, 조금 더 현실적인 진동소음 발생 조건들에 대한 비교를 수행하였다. 먼저 음파 파수 대비 소음원 파수의 크기에 따라 진행파와 소멸파로 분류하고, 각 종류별로 소음원 파수에 따른 음압장과 입자가속도장의 상대적 크기 경향성이 달라지는 것을 이론 및 2차원 모델 해석을 통하여 확인하였다. 소음원 파수가 낮은 진행파 영역에서 발생하는 소음에 대해서는 입자가속도 감지 방식이 음압 감지 방식에 비해서 둔감할 수 있으나, 소음원 파수가 높은 소멸파 소음에 대해서는 반대로 입자가속도 감지 방식이 민감할 수 있음을 보였다. 플랫폼 구조물을 포함하는 3차원 모델에서도 진동소음원의 종류에 따라 음압과 입자감속도 감지 방식의 진동소음 민감도가 달라졌으며, 해당 결과가 이론 및 2차원 모델을 통해 분석된 소음원 파수별 음압장 및 입자가속도장 비교 결과와 경향이 일치함을 확인하였다.
이는 현재까지 수직입사 평면파 조건에서 수행되어 온 수동 소나센서의 후면소음 차단 성능이 실제 플랫폼 진동소음에 대한 모든 차단 성능을 대변할 수 없으며 심지어 반대 경향으로도 나타날 수 있음을 시사한다. 소음원의 종류에 따라서도, 감지 물리량에 따라서도 후면소음 민감도가 상이하게 나타날 수 있기 때문에, 저감하고자 하는 목표 소음원에 따 라서 하이드로폰 감지 물리량의 선택과 소나센서 구조의 설계가 적절하게 이루어져야 할 것이다. 추후 플랫폼 진동소음 발생 양상과 전달 경로 등에 대한 연구들이 추가적으로 수행된다면, 실질적으로 수동 소나센서의 후면 진동소음 차단성능 구현에 있어 많은 도움이 될 것으로 판단된다.
