

I. 서 론
수중 환경에서는 데이터 전송을 위해 음향 신호를 전송하게 된다. 지상 환경에서 신호가 전파될 때 소요되는 전파 지연과 달리 수중 환경에서의 음향 신호의 전파 지연은 상당히 길게 된다.[1-4] Chitre et al.[5]은 수중 음향 통신과 네트워킹 및 매체 접근 제어 프로토콜에 대해 발표하였다. Fullmer와 Garcia-Luna- Aceves[6]은 FAMA(Floor Acquisition Multiple Access)를 발표하였고, Molins와 Stojanovic[7]은 수중 음향 네트워크를 위해 슬롯 FAMA를 발표하였다. Peleato와 Stojanovic[8]은 애드-혹 수중 음향 센서 네트워크를 위해 DACAP(Distance Aware Collision Avoidance Protocol)을 제안하였다. Syed et al.[9]은 수중 음향 네트워크에서의 에너지 효율적인 매체 접근 제어 프로토콜을 위해 톤 기반의 T-Lohi(Tone Lohi)를 제안하였다. 톤을 사용할 경우 노드들에서 톤에 대한 리스닝 작업이 추가로 필요할 수 있으므로, 본 논문에서는 별도의 톤을 사용하지 않는 매체 접근 제어 프로토콜을 제안한다. Chirdchoo et al.[10]은 수중 음향 네트워크에서 이웃 노드들에 대한 폴링에 기반한 RIPT (Receiver-Initiated Packet Train) 프로토콜을 제안하였다. 이웃 노드들에 대한 폴링을 위해서는 노드들간의 수중 전파 지연을 미리 알 필요가 있는데, 사전에 예측한 노드들간 수중 전파 지연을 사용할 경우 부정확할 수 있다. 본 논문에서는 폴링을 사용하지 않는 매체 접근 제어프로토콜을 제안한다. Ng et al.[11]은 수중 음향 매체 접근 제어를 위해 ROPA(Reverse Opportunistic Packet Appending) 프로토콜을 제안하였다. ROPA는 수신자에 의해 핸드쉐이크가 시작되는 RIPT와 달리 송신자에 의해 핸드쉐이크가 시작되는데, 역시 이웃 노드들의 전송을 스케쥴링하기 위해 노드들간의 수중 전파 지연을 미리 알 필요가 있다. Noh et al.[12]은 수중 네트워크에서의 전송 스케쥴링에 기반한 DOTS(Delay-aware Opportunistic Transmission Scheduling) 프로토콜을 제안하였다. DOTS 전송 스케쥴링을 위해 각 노드에서의 지연 지도의 관리를 필요로 한다. 각 노드에서 지연 지도는 이웃 노드들의 매체 접근 제어 프레임들의 전송을 관찰하여 매체 접근 제어 프레임들의 시간스탬프 값들을 이용하여 관리 및 업데이트된다. 본 논문에서는 지연 지도의 관리 및 업데이트가 필요 없는 매체 접근 제어 프로토콜을 제안한다. Shahabudeen et al.[13]은 수중 음향 네트워크를 위한 고성능 매체 접근 제어 프로토콜에 대해 분석을 수행하였다. 지상 환경에서도 매체 접근 제어 프로토콜에 대한 분석 연구가 수행되어 왔는데, Bianchi[14]은 IEEE 802.11 DCF(Distributed Coordination Function)에 대한 성능 분석을 수행하였고, Hwang et al.[15,16]은 IEEE 802.11e EDCA(Enhanced Distributed Channel Access)에 대한 성능 분석과 백오프 프리징 동작에 대한 성능 분석을 수행하였다.
본 논문에서는 다수의 수중 센서 노드들이 수중 환경에서 센싱한 정보들을 각각 단일홉으로 싱크 노드에 전송하는 수중 네트워크를 고려하고, 수중 환경에서의 긴 전파 지연 특성을 이용한 매체 접근 제어 프로토콜을 제안한다. 제안하는 수중 전파 지연을 고려한 매체 접근 제어 프로토콜은 기존의 CSMA/ CA(Carrier Sense Multiple Access/Collision Avoidance) 방식과 달리, 한 슬롯 내에 여러 개의 RTS(Request-To- Send) 프레임들이 수신되는 경우에 RTS 프레임들이 겹치지 않게 수신되면 이들을 디코딩 및 복조를 통해 복원한다. 여러 수중 센서 노드들에서 동시에 전송된 RTS 프레임들이라도 거리에 따른 서로 다른 전파 지연에 의해 수중 싱크에서 수신되는 시점이 다를 수 있기 때문이다. 각각의 수중 센서 노드들이 싱크 노드로부터 떨어져 있는 거리의 차이가 일정치 이상 차이가 나는 경우, RTS 프레임들은 한 슬롯 내에서 겹치지 않고 싱크 노드에서 수신이 가능하며, 이러한 현상을 모델링하기 위해 본 논문에서는 링 기반의 수중 네트워크 모델을 제안한다. 제안하는 링 기반의 수중 네트워크 모델을 통해, 제안하는 수중 전파 지연을 고려한 매체 접근 제어 프로토콜의 성능 및 수율을 수학적으로 분석한다. 이를 통해 다양한 수중 네트워크 환경에서 제안하는 수중 전파 지연을 고려한 매체 접근 제어 프로토콜의 성능 평가를 수행하고 기존의 CSMA/CA 매체 접근 제어 프로토콜과도 성능을 비교 분석한다.
II. 수중 전파 지연을 고려한 매체 접근 제어 프로토콜
본 논문에서는 수중 싱크 노드가 1개 존재하고, 수중 싱크 노드를 제외한 수중 센서 노드들이  개 존재하는 수중 네트워크 환경을 고려한다. 수중 싱크 노드 및
개 존재하는 수중 네트워크 환경을 고려한다. 수중 싱크 노드 및  개의 수중 센서 노드들은 서로의 통신 반경 안에 존재하는 상황을 고려한다.
개의 수중 센서 노드들은 서로의 통신 반경 안에 존재하는 상황을 고려한다.  개의 수중 센서 노드들이 수중 환경에서 센싱한 정보들을 각각 단일홉으로 싱크 노드에 전송한다.
개의 수중 센서 노드들이 수중 환경에서 센싱한 정보들을 각각 단일홉으로 싱크 노드에 전송한다.  개의 수중 센서 노드들은 Fig. 1과 같이 제안하는 수중 전파 지연을 고려한 매체 접근 제어 프로토콜에 의해 매체 접근을 시도한다.
개의 수중 센서 노드들은 Fig. 1과 같이 제안하는 수중 전파 지연을 고려한 매체 접근 제어 프로토콜에 의해 매체 접근을 시도한다.
제안하는 수중 전파 지연을 고려한 매체 접근 제어 프로토콜이 기존의 CSMA/CA 방식과 다른 점은, 한 슬롯 내에 여러 개의 RTS 프레임들이 수신되는 경우에 RTS 프레임들이 겹치지 않게 수신되면 이들을 디코딩 및 복조를 통해 복원할 수 있다는 점이다. 이러한 디코딩 및 복조를 통한 복원은 수중 통신 환경에서의 긴 전파 지연 특성을 이용한 것이다. 여러 수중 센서 노드들에서 동시에 전송된 RTS 프레임들이라도 거리에 따른 서로 다른 전파 지연에 의해 수중 싱크에서는 수신되는 시점이 다를 수 있다. 따라서, 같은 슬롯 내에서도 겹치지 않고 수신되는 RTS 프레임들이 존재할 수 있고, 이러한 경우에 디코딩 및 복조를 통해 겹치지 않은 RTS 프레임을 복원하는 매체 접근 제어 프로토콜을 제안한다.

한 슬롯 내에서 겹쳐서 수신되는 RTS 프레임들이 존재할 경우에는 충돌로 간주하고, 한 슬롯 내에서 RTS 프레임들이 겹치지 않고 수신되면 성공으로 간주하고, 겹치지 않은 RTS 프레임들을 디코딩 및 복조하여 각 RTS 프레임을 송신한 수중 센서 노드의 ID를 읽어들여, 그 중 한 개의 수중 센서 노드에게만 DATA 프레임의 전송을 허용하기 위해 CTS(Clear- To-Send) 프레임을 싱크 노드가 전송한다. 싱크 노드로부터 CTS 프레임을 전송받은 수중 센서 노드는 DATA 프레임을 싱크 노드로 전송하고, 이를 수신한 싱크 노드는 다시 ACK(Acknowledgement) 프레임을 수중 센서 노드에게 송신함으로써 DATA 프레임을 성공적으로 수신하였음을 알려준다.
본 논문에서는 제안하는 수중 전파 지연을 고려한 매체 접근 제어 프로토콜의 성능을 분석하기 위해 수학적 분석을 제안한다. 한 슬롯 내에서 싱크 노드가 RTS 프레임들을 겹치치 않고 수신하기 위해서는, RTS 프레임을 송신한 수중 센서 노드들로부터 싱크 노드까지의 각 거리가 일정치 이상 차이가 나야 한다. 이를 수식으로 나타내면 다음과 같다.
 , (1)
, (1)
여기서 RTS 프레임을 송신한 수중 센서 노드 1번과 2번이
있다고 가정할 때,  은 1번 수중 센서 노드에서 싱크 노드까지의 거리이고,
은 1번 수중 센서 노드에서 싱크 노드까지의 거리이고,  은 2번 수중 센서 노드에서 싱크 노드까지의 거리이다.
은 2번 수중 센서 노드에서 싱크 노드까지의 거리이다.  는 RTS 프레임 전송에 소요되는 시간이고,
는 RTS 프레임 전송에 소요되는 시간이고,  는 수중 환경에서의 음향 신호의 전파 속도이다.
는 수중 환경에서의 음향 신호의 전파 속도이다.
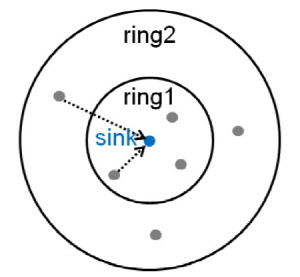
Eq.(1)과 같이 각각의 수중 센서 노드들이 싱크 노드로부터 떨어져 있는 거리의 차이가 일정치 이상 차이가 나는 경우, RTS 프레임들은 한 슬롯 내에서 겹치지 않고 싱크 노드에서 수신이 가능하며, 이러한 현상을 모델링하기 위해 본 논문에서는 Fig. 2와 같은 링 기반의 수중 네트워크 모델을 제안한다.
제안하는 링 기반의 수중 네트워크 모델을 통해, 서로 다른 링에 존재하는 수중 센서 노드들이 RTS 프레임을 동시에 전송하더라도, 싱크 노드에서 이들을 수신시 한 슬롯 내에서 서로 겹치지 않을 수 있다. Fig. 2에서는 2개의 링을 예로 들고 있는데, 2개의 서로 다른 링에 위치한 2개의 수중 센서 노드들이 동시에 RTS 프레임을 보내는 경우, 싱크 노드에서는 제안하는 수중 전파 지연을 고려한 매체 접근 제어 프로토콜을 통해 이들을 복원할 수 있다. 이유는 Eq.(1)에 의해 서로 다른 각 링에 위치한 수중 센서 노드들이 싱크 노드로부터 떨어진 거리가 일정치 이상 차이가 나서, 그들로부터 보내진 RTS 프레임들은 싱크 노드에서 수신시 서로 겹치지 않기 때문이다.
제안하는 링 기반의 수중 네트워크 모델에서도, 같은 링에 위치한 수중 센서 노드들이 RTS 프레임을 동시에 전송하는 경우에는 RTS 프레임들이 싱크 노드에서 수신시 충돌하게 된다. 이유는 같은 링에 위치한 수중 센서 노드들은 싱크 노드로부터의 거리 차이가 Eq.(1)에서 나타낸 일정치 이상 되지 않기 때문에, 싱크 노드에서 수신된 RTS 프레임들이 서로 겹쳐서 수신되기 때문이다.
수중 센서 노드들이 전송한 RTS 프레임들이 싱크 노드에서 수신시 충돌나는 경우, 충돌난 RTS 프레임들을 전송한 수중 센서 노드들은 CSMA/CA의 백오프 알고리즘에 의해 경쟁 윈도우  를 이용하여 현재 전송하는 DATA 프레임이 성공적으로 전송되기 전까지 RTS 프레임 전송을 시도한 횟수를
를 이용하여 현재 전송하는 DATA 프레임이 성공적으로 전송되기 전까지 RTS 프레임 전송을 시도한 횟수를  라 하면,
라 하면,  사이의 정수를 랜덤하게 선택하여 그만큼의 슬롯 개수가 지난 후 RTS 프레임을 재전송할 수 있게 된다. DATA 프레임을 성공적으로 전송한 수중 센서 노드는
사이의 정수를 랜덤하게 선택하여 그만큼의 슬롯 개수가 지난 후 RTS 프레임을 재전송할 수 있게 된다. DATA 프레임을 성공적으로 전송한 수중 센서 노드는  사이의 정수를 랜덤하게 선택하여 그만큼의 슬롯 개수가 지난 후 RTS 프레임을 전송하게 된다.
사이의 정수를 랜덤하게 선택하여 그만큼의 슬롯 개수가 지난 후 RTS 프레임을 전송하게 된다.
본 논문에서는 제안하는 링 기반의 수중 네트워크 모델을 통해, 제안하는 수중 전파 지연을 고려한 매체 접근 제어 프로토콜을 다음과 같이 수학적으로 분석한다. 수학적인 분석을 위해 각 링에 균등하게 수중 센서 노드들이 존재하는 상황을 고려한다.
제안하는 매체 접근 제어 프로토콜에서는 같은 링에 위치한 수중 센서 노드들이 RTS 프레임들을 동시에 싱크 노드로 전송할 경우 이들에 대한 싱크 노드에서의 수신은 충돌로 간주한다. 따라서, 링이  개인 수중 네트워크에서
개인 수중 네트워크에서  개의 수중 센서 노드들 중 1개의 수중 센서 노드가 싱크 노드로 RTS 프레임을 전송시, 같은 링에 위치한
개의 수중 센서 노드들 중 1개의 수중 센서 노드가 싱크 노드로 RTS 프레임을 전송시, 같은 링에 위치한  개의 다른 수중 센서 노드들이 RTS 프레임을 동시에 전송함으로써 발생하는 충돌 확률
개의 다른 수중 센서 노드들이 RTS 프레임을 동시에 전송함으로써 발생하는 충돌 확률  은 다음과 같이 유도된다.
은 다음과 같이 유도된다.
 , (2)
, (2)
여기서  은 싱크 노드를 제외한 수중 센서 노드들의 개수,
은 싱크 노드를 제외한 수중 센서 노드들의 개수,  은 제안하는 링 기반의 수중 네트워크 모델에서의 링의 개수,
은 제안하는 링 기반의 수중 네트워크 모델에서의 링의 개수,  은 링이
은 링이  개인 수중 네트워크에서 수중 센서 노드가 RTS 프레임을 전송할 확률이다. Eq.(2)와 같이 유도되는 이유는 각 링마다 균등하게
개인 수중 네트워크에서 수중 센서 노드가 RTS 프레임을 전송할 확률이다. Eq.(2)와 같이 유도되는 이유는 각 링마다 균등하게  개의 수중 센서 노드들이 있는 상황에서, 같은 링에 위치한 2개 이상의 수중 센서 노드들이 RTS 프레임을 동시에 전송해야 충돌이 일어나기 때문이다.
개의 수중 센서 노드들이 있는 상황에서, 같은 링에 위치한 2개 이상의 수중 센서 노드들이 RTS 프레임을 동시에 전송해야 충돌이 일어나기 때문이다.
 개의 수중 센서 노드들이 프레임을 전송하지 않아서 링이
개의 수중 센서 노드들이 프레임을 전송하지 않아서 링이  개인 수중 네트워크에서의 채널이 유휴일 확률
개인 수중 네트워크에서의 채널이 유휴일 확률  는 다음과 같다.
는 다음과 같다.
 . (3)
. (3)
다음으로 수중 네트워크 채널에서 RTS 프레임 전송이 성공할 확률을 구하는데, 링의 개수인  에 따라 달라지게 된다. 본 논문에서는
에 따라 달라지게 된다. 본 논문에서는  인 경우에 대해서 분석하도록 한다.
인 경우에 대해서 분석하도록 한다.  은 링이
은 링이  개인 수중 네트워크에서 수중 센서 노드들이 동시에 전송한 RTS 프레임들을 싱크 노드에서 1개 이상 성공적으로 수신할 확률이다. 먼저
개인 수중 네트워크에서 수중 센서 노드들이 동시에 전송한 RTS 프레임들을 싱크 노드에서 1개 이상 성공적으로 수신할 확률이다. 먼저  경우, 수중 채널에서 RTS 프레임 전송이 성공할 확률
경우, 수중 채널에서 RTS 프레임 전송이 성공할 확률  은 다음과 같이 구해진다.
은 다음과 같이 구해진다.
 , (4)
, (4)
여기서  는 1개의 수중 센서 노드만 RTS 프레임을 전송하고 나머지
는 1개의 수중 센서 노드만 RTS 프레임을 전송하고 나머지  개의 노드들은 전송하지 않을 확률이다. 다음으로
개의 노드들은 전송하지 않을 확률이다. 다음으로  경우에는, 수중 채널에서 RTS 프레임 전송이 성공할 확률
경우에는, 수중 채널에서 RTS 프레임 전송이 성공할 확률  은 다음과 같이 구해진다.
은 다음과 같이 구해진다.
 (5)
(5)
여기서  는 1개의 수중 센서 노드만 RTS 프레임을 전송하고 나머지
는 1개의 수중 센서 노드만 RTS 프레임을 전송하고 나머지  개의 노드들은 전송하지 않을 확률이고,
개의 노드들은 전송하지 않을 확률이고, 
 는 2개의 수중 센서 노드들만 전송하는데 그들이 같은 링에 위치하지 않을 확률이고,
는 2개의 수중 센서 노드들만 전송하는데 그들이 같은 링에 위치하지 않을 확률이고, 
 는 3개의 수중 센서 노드들만 전송하는데 그들이 전부 같은 링에 위치하지는 않을 확률이다. 이와 같이 유도되는 이유는, 링이 2개인 경우 서로 다른 링에서 동시에 전송한 RTS 프레임들은 싱크 노드에서 수신시 서로 다른 거리에 따른 전파 지연의 차이에 의해서 겹치지 않기 때문이다.
는 3개의 수중 센서 노드들만 전송하는데 그들이 전부 같은 링에 위치하지는 않을 확률이다. 이와 같이 유도되는 이유는, 링이 2개인 경우 서로 다른 링에서 동시에 전송한 RTS 프레임들은 싱크 노드에서 수신시 서로 다른 거리에 따른 전파 지연의 차이에 의해서 겹치지 않기 때문이다.
이렇게 제안하는 수학적 분석을 통해 링이  개인 수중 네트워크에서의 제안하는 수중 전파 지연을 고려한 매체 접근 제어 프로토콜의 수율
개인 수중 네트워크에서의 제안하는 수중 전파 지연을 고려한 매체 접근 제어 프로토콜의 수율  는 다음과 같이 구해진다.
는 다음과 같이 구해진다.
 (6)
(6)
여기서  는 프레임 전송이 성공시 수중 채널에서 소요되는 시간,
는 프레임 전송이 성공시 수중 채널에서 소요되는 시간,  는 프레임 전송이 충돌시 수중 채널에서 소요되는 시간,
는 프레임 전송이 충돌시 수중 채널에서 소요되는 시간,  는 프레임 전송이 없을시 수중 채널이 유휴일 시간,
는 프레임 전송이 없을시 수중 채널이 유휴일 시간,  는 전송하는 데이터 페이로드의 시간이다. 다음 장에서는 이와 같이 수학적으로 분석한 제안하는 수중 전파 지연을 고려한 매체 접근 제어 프로토콜의 성능을 다양한 환경에서 평가하고 비교 분석한다.
는 전송하는 데이터 페이로드의 시간이다. 다음 장에서는 이와 같이 수학적으로 분석한 제안하는 수중 전파 지연을 고려한 매체 접근 제어 프로토콜의 성능을 다양한 환경에서 평가하고 비교 분석한다.
III. 성능 평가 결과 및 분석
본 장에서는 제안하는 수중 전파 지연을 고려한 매체 접근 제어 프로토콜에 대한 성능 평가를 다양한 환경에서 수행하고 비교 분석한다. 성능 평가를 위해 고려하는 파라미터들은 다음과 같다. 셀 반경은 2.5 km, 음향 신호의 수중 전파 속도는 1500 m/s, 최대 전파 지연은 5 km / 1500 m/s = 3.3 s, 스펙트럼 효율은 3.3 bps/Hz, 수중 채널 대역폭은 0.2 kHz, 수중 전송률은 3.3 bps/Hz × 0.2 kHz = 660 bps, 슬롯 시간은 3.3 + 0.44 sec, IFS(Inter-Frame Space)는 0.1 s, PHY(Physical Layer) 헤더는 128 bits, RTS는 128 + 160 bits, CTS는 128 + 112 bits, ACK는 128 + 112 bits, 매체 접근 제어 헤더는 272 bits, 데이터 페이로드는 8184 bits으로 고려한다. 입력 파라미터들과 Eq.(1)에 의해 셀 반경은 2.5 km인데 링 폭이 660 m이상이면 되므로, 최대 고려할 수 있는 링의 개수는 3개이다. 본 논문에서는 제안하는 수중 전파 지연을 고려한 매체 접근 제어 프로토콜의 수율을 수중 네트워크 모델의 링이 2개인 경우에 대해서 분석한다. 또한, 기존의 CSMA/CA 매체 접근 제어 프로토콜의 수율과도 비교 분석한다. 기존의 CSMA/CA 매체 접근 제어 프로토콜은 본 논문에서 제안하는 링 기반의 수중 네트워크 모델에서 링이 1개인 경우에 해당한다.
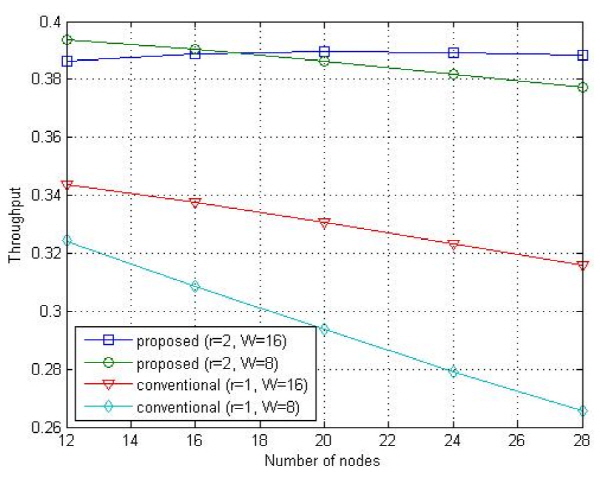
Fig. 3에서는 제안하는 수중 전파 지연을 고려한 매체 접근 제어 프로토콜의  일 때의 수율을 나타낸다. 경쟁 윈도우
일 때의 수율을 나타낸다. 경쟁 윈도우  를 변화시켜가며 수율을 나타내었다. 또한
를 변화시켜가며 수율을 나타내었다. 또한  일 때의 수율은 기존의 CSMA/CA 매체 접근 제어 프로토콜의 수율을 나타낸다. 가로축은 싱크 노드를 제외한 수중 센서 노드들의 개수
일 때의 수율은 기존의 CSMA/CA 매체 접근 제어 프로토콜의 수율을 나타낸다. 가로축은 싱크 노드를 제외한 수중 센서 노드들의 개수  를 나타내고, 세로축은 수율
를 나타내고, 세로축은 수율  을 나타낸다. 여기서의 수율은 표준화된 값으로 0과 1사이의 값에 해당한다.
을 나타낸다. 여기서의 수율은 표준화된 값으로 0과 1사이의 값에 해당한다.  경우의 제안하는 수중 전파 지연을 고려한 매체 접근 제어 프로토콜의 수율이 기존 CSMA/CA 매체 접근 제어 프로토콜과 비교시 더 높은 수율을 나타낸다. 경쟁 윈도우
경우의 제안하는 수중 전파 지연을 고려한 매체 접근 제어 프로토콜의 수율이 기존 CSMA/CA 매체 접근 제어 프로토콜과 비교시 더 높은 수율을 나타낸다. 경쟁 윈도우 가 16에서 8로 감소함에 따라, 제안하는 매체 접근 제어 프로토콜과 기존 CSMA/CA 매체 접근 제어 프로토콜은 수중 센서 노드들의 개수가 많은 경우 수율이 낮아지는 경향을 보인다. 제안하는 매체 접근 제어 프로토콜의 경쟁 윈도우
가 16에서 8로 감소함에 따라, 제안하는 매체 접근 제어 프로토콜과 기존 CSMA/CA 매체 접근 제어 프로토콜은 수중 센서 노드들의 개수가 많은 경우 수율이 낮아지는 경향을 보인다. 제안하는 매체 접근 제어 프로토콜의 경쟁 윈도우 가 16인 경우 수중 센서 노드들의 개수
가 16인 경우 수중 센서 노드들의 개수  이 적을 때는 수율이 낮게 나타나므로,
이 적을 때는 수율이 낮게 나타나므로,  에 따라 적절한 입력 파라미터
에 따라 적절한 입력 파라미터  를 사용해야 높은 수율을 얻게 된다. Fig. 3에서는 입력 파라미터인 경쟁 윈도우
를 사용해야 높은 수율을 얻게 된다. Fig. 3에서는 입력 파라미터인 경쟁 윈도우 가 동일한 상황에서는 제안하는 매체 접근 제어 프로토콜의 수율이 기존 CSMA/CA 매체 접근 제어 프로토콜의 수율보다 항상 높게 나타남을 보여준다. 이는 제안하는 매체 접근 제어 프로토콜에 의해 수중 센서 노드들의 더 많은 동시 전송을 싱크 노드에서 복원할 수 있기 때문이다.
가 동일한 상황에서는 제안하는 매체 접근 제어 프로토콜의 수율이 기존 CSMA/CA 매체 접근 제어 프로토콜의 수율보다 항상 높게 나타남을 보여준다. 이는 제안하는 매체 접근 제어 프로토콜에 의해 수중 센서 노드들의 더 많은 동시 전송을 싱크 노드에서 복원할 수 있기 때문이다.
IV. 결 론
본 논문에서는 다수의 수중 센서 노드들이 수중 환경에서 센싱한 정보들을 각각 단일홉으로 싱크 노드에 전송하는 수중 네트워크를 고려하고, 수중 환경에서의 긴 전파 지연 특성을 이용한 매체 접근 제어 프로토콜을 제안하였다. 제안하는 수중 전파 지연을 고려한 매체 접근 제어 프로토콜은 기존의 CSMA/CA 방식과 달리, 한 슬롯 내에 여러 개의 RTS 프레임들이 수신되는 경우에 RTS 프레임들이 겹치지 않게 수신되면 이들을 디코딩 및 복조를 통해 복원한다. 여러 수중 센서 노드들에서 동시에 전송된 RTS 프레임들이라도 거리에 따른 서로 다른 전파 지연에 의해 수중 싱크에서 수신되는 시점이 다를 수 있기 때문이다. 본 논문에서는 링 기반의 수중 네트워크 모델을 이용하여 제안하는 수중 전파 지연을 고려한 매체 접근 제어 프로토콜의 성능 및 수율을 수학적으로 분석하였다. 이를 통해 다양한 수중 네트워크 환경에서 제안하는 수중 전파 지연을 고려한 매체 접근 제어 프로토콜의 성능 평가를 수행하고 기존의 CSMA/CA 매체 접근 제어 프로토콜과도 성능을 비교 분석하였다.
