

I. 서 론
II. 문제 기술
III. 제안하는 알고리즘
3.1 빔형성기 및 주파수 변환, 자기 도플러 감쇠
3.2 빔공간 영역의 MC-NMF
3.3 표적 기저 선택 및 방위, 주파수, 시간 추정
IV. 실험 결과 및 토의
V. 결 론
I. 서 론
능동 소나 시스템은 수중음향 환경에서 핑 신호를 방사한 후 반사된 음파를 수신하여 분석함으로써 표적을 탐지하는 시스템이다. 불행히도 수신된 신호에는 표적으로부터의 반사음 외에도 주변의 많은 산란체로부터 반사된 신호, 즉 잔향이 존재한다. 정합 필터 등의 기존 탐지 시스템은 이와 같은 잔향에 대해 민감하며, 이는 표적의 탐지 성능을 저하시키는 원인이 된다. 따라서 여러 방향에서 이러한 단점을 보완하기 위한 연구가 진행된 바 있다. 이 중 하나는 송신 측에서 신호를 새롭게 설계하는 접근법이며, 다른 하나는 수신 측에서 신호를 분석하여 잔향에 의한 영향을 줄이는 접근법이다.
지속파 펄스는 거리-도플러 맵 상에서 표적을 탐지하기가 용이하기 때문에 능동 소나 시스템에서 널리 사용되는 송신 신호이나, 잔향에 취약한 단점이 있다.[1] 이러한 단점을 보완하기 위하여 선형 주파수 변조 펄스 및 기하 빗살 펄스[2] 등의 여러 파형이 제안되고 있으나, 선형 주파수 펄스의 경우 도플러 분해능이 저하되는 등[3] 여러 단점이 존재하며, 이에 따라 지속파 펄스 및 이를 변형한 신호들을 사용하는 시스템이 여전히 사용 및 연구되고 있다.[4]
또한, 수신 단에서 잔향의 영향을 감소시키거나 혹은 잔향 환경에서 원하는 신호를 탐지하는 기술도 연구가 진행된 바 있으며, 그중 하나는 자기 회귀 모델에 기초한 백색화 기법이다.[5] 이는 목표하는 신호를 검출하는 데에 있어서 잔향의 영향을 줄일 수 있지만, 표적과 잔향의 도플러 이동이 유사한 경우 성능이 저하되는 단점이 존재한다. 이를 보완하기 위하여 주성분 역산(Principal Component Inversion, PCI)에 기초한 알고리즘이 제안된 바 있으며,[6] 최근에는 이를 개선한 신호 부공간 추출 알고리즘 또한 제안되었다.[7] 또한 수신 신호의 시간-주파수 축 특성을 이용하여 원하는 신호를 추출하는 방법도 제안된 바 있다.[8]
위에서 연구된 알고리즘들은 신호를 1차원(시간 축) 혹은 2차원(시간-공간 축)에서 분석하는 알고리즘이다. 최근의 음향 신호 분석에 대한 연구에서는 다채널 음향 신호를 3차원(시간-주파수-공간 축)에서 분석하는 시도가 이루어지고 있으며,이 중 하나가 다채널 비음수 행렬 분해(Multi-Channel Nonnegative Matrix Factorization, MC-NMF)를 이용한 기법이다.[9] MC-NMF 기법은 믹싱된 오디오 신호를 대상으로 개발된 알고리즘이지만, 이를 빔형성기와 결합하여 고안된 빔공간 MC-NMF 알고리즘을 이용하면 다채널 수신기를 통해 입력된 음향 신호에도 적용이 가능하다는 것이 연구된 바 있다.[10]
본 논문에서는 잔향환경에서 표적 반향음을 탐지하는 알고리즘에 대한 연구를 진행하였으며, 특히 표적 반향음의 도플러 이동이 크지 않아 표적 반향음의 주파수 성분이 잔향에 영향을 받는 상황을 해결하는 것에 주안점을 두었다. 이러한 문제를 해결하기 위하여 수신음을 3차원 축에서 분석하고자 하였으며, 일반적으로 소나 수신기에 빔형성기가 이미 사용되고 있는 점을 감안하여 빔형성기 출력 데이터에 빔공간 MC-NMF 기법을 적용하는 연구를 진행하였다.
II. 문제 기술
Fig. 1과 같이 수중에서 능동소나 수신기가 신호를 수신하는 상황을 가정해보자. 수신기가 일정한 속도 로 이동한다고 가정하면, 표적으로부터의 반향음 신호 sT(t)는 다음과 같이 나타난다.[11]
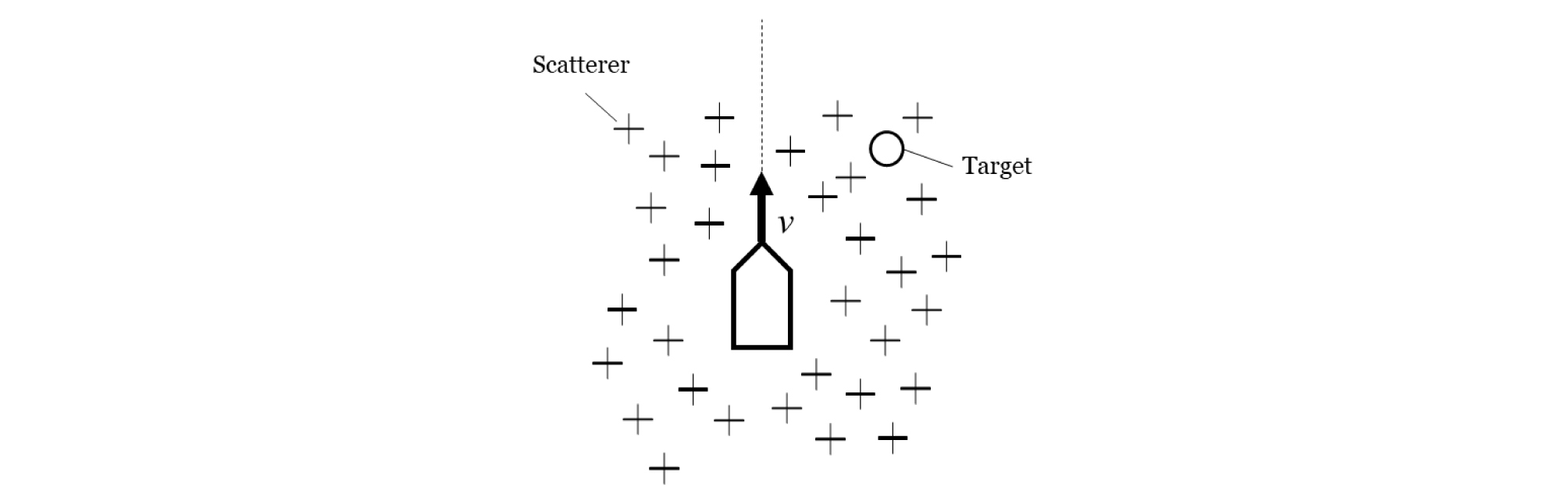
| $$s_T(t)=a\begin{vmatrix}G(\psi-\psi_0)\end{vmatrix}s(t-t_d)exp(j2\pi fdt),$$ | (1) |
여기서 s(t)는 방사된 핑 신호를 나타내며, a는 크기 감쇠 계수, td는 시간 지연, fd는 도플러 이동 주파수, ψ는 표적 신호의 입사 각도 (소나의 진행 방향 기준), G(ψ)는 센서 혹은 빔형성기의 방향성 함수를 나타낸다. 이때 도플러 이동 주파수 fd는 센서와 표적의 상대 속도에 의해 결정된다. Eq. (1)에 기술된 수신 신호의 스펙트럼은 다음과 같다.[11]
| $$s_T(f)=a\begin{vmatrix}G(\psi-\psi_0)\end{vmatrix}S(f-f_d)\times exp\{-j2\pi(f-f_d)t_d).$$ | (2) |
잔향 신호는 여러 산란체로부터 반사된 신호들이 중첩되어 나타나며, 이는 다음과 같이 기술될 수 있다.
| $$s_R(t)=\sum_n\left\{a_n\left|G(\psi_n-\psi_0)\right|s(t-t_d)\times exp({j2\pi f}_{d_n}t\right\},$$ | (3) |
여기서 ψn, tdn, fdn은 각각 n번째 산란체로 부터의 신호 입사각, 시간 지연, 도플러 주파수를 나타낸다. 표적 반향음의 경우와 마찬가지로 잔향의 스펙트럼은 Eq. (3)으로부터 다음과 같이 얻어질 수 있다.[11]
| $$s_R(f)=\sum_n\left[a_n\left|G(\psi_n-\psi_0)\right|S(f-f_{d_n})\times exp\{(-{j2\pi(f}-f_{d_n})t_{d_n}\}\right],$$ | (4) |
일반적으로 선박이나 함정이 움직이는 속도에 비하면 대부분의 산란체들은 정지한 물체로 간주할 수 있다. 방사되는 신호가 f0의 단일 주파수를 가지는 지속파 신호라고 가정하면, 각 산란체의 도플러 주파수는 입사각에 의해 다음과 같이 나타난다.
| $$f_{d_n}=\frac{2\upsilon\cos\varphi_n}{\lambda_0}=\frac{2\upsilon\cos\varphi_n}cf_0.$$ | (5) |
따라서, fdn의 도플러 주파수를 가지는 잔향의 입사각은 다음과 같다.
| $$\psi_n=\cos^{-1}(\frac c{2\upsilon}\frac{f_{d_n}}{f_0}).$$ | (6) |
위의 식에서 -1≤cosψn≤1이므로, 도플러 주파수 fdn의 범위는 이다. 따라서, 단일 주파수의 지속파를 방사하는 능동 소나의 경우, 잔향 신호는 표적 반사음에 비해 넓은 방위에서 넓은 주파수 대역에 걸쳐 긴 시간 동안 입사된다.
III. 제안하는 알고리즘
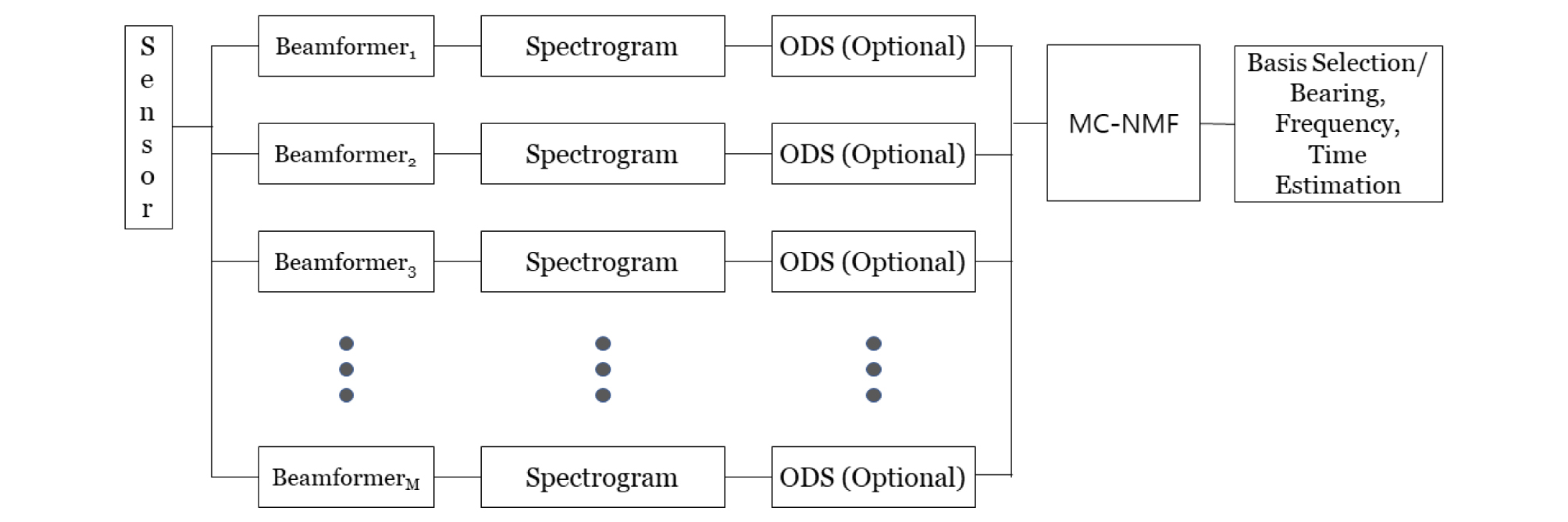
제안하는 알고리즘은 Fig. 2와 같이 빔형성기 및 주파수 변환, 자기 도플러 감쇠(Own Doppler Suppression, ODS), 그리고 MC-NMF 모듈로 이루어져 있다.
3.1 빔형성기 및 주파수 변환, 자기 도플러 감쇠
많은 능동 소나 시스템은 이미 빔형성기를 포함하고 있으며, 제안하는 알고리즘에서 필요로 하는 바와 같이 여러 방위에 대해 빔형성을 수행하고 있다. 따라서 본 논문에서는 빔형성기에 대해 구체적으로 언급하지 않는다.
m번째 빔형성기를 통과한 신호의 크기 스펙트로그램을 Xm이라 하자. 이는 K×N 크기의 비음수 행렬이 되며, 여기서 K, N은 각각 주파수 빈과 시간 프레임의 개수를 나타낸다. 각 크기 스펙트로그램 데이터는 잔향 신호를 포함하고 있으며, 지속파 능동 소나의 잔향 신호는 Eqs. (4)와 (6)에서 보는 바와 같이 빔응답 |G(ψ-ψ0)|에 의해 증폭되어 수신된다. 이는 MC-NMF를 이용한 데이터 분석 시에 원하는 신호의 획득을 방해할 수 있으므로, 다음과 같은 과정을 통하여 이러한 신호를 억제한다.
| $$\upsilon_{m,kn}=\left\{\begin{array}{l}w_m(k)\chi_{m,kn}\\\chi_{m,kn}\end{array}\right.\left.\begin{array}{r}-\Delta\psi\leq\psi_{f_k}-\psi_{0,m}\leq\Delta\psi\\otherwise\end{array}\right\}$$ | (7) |
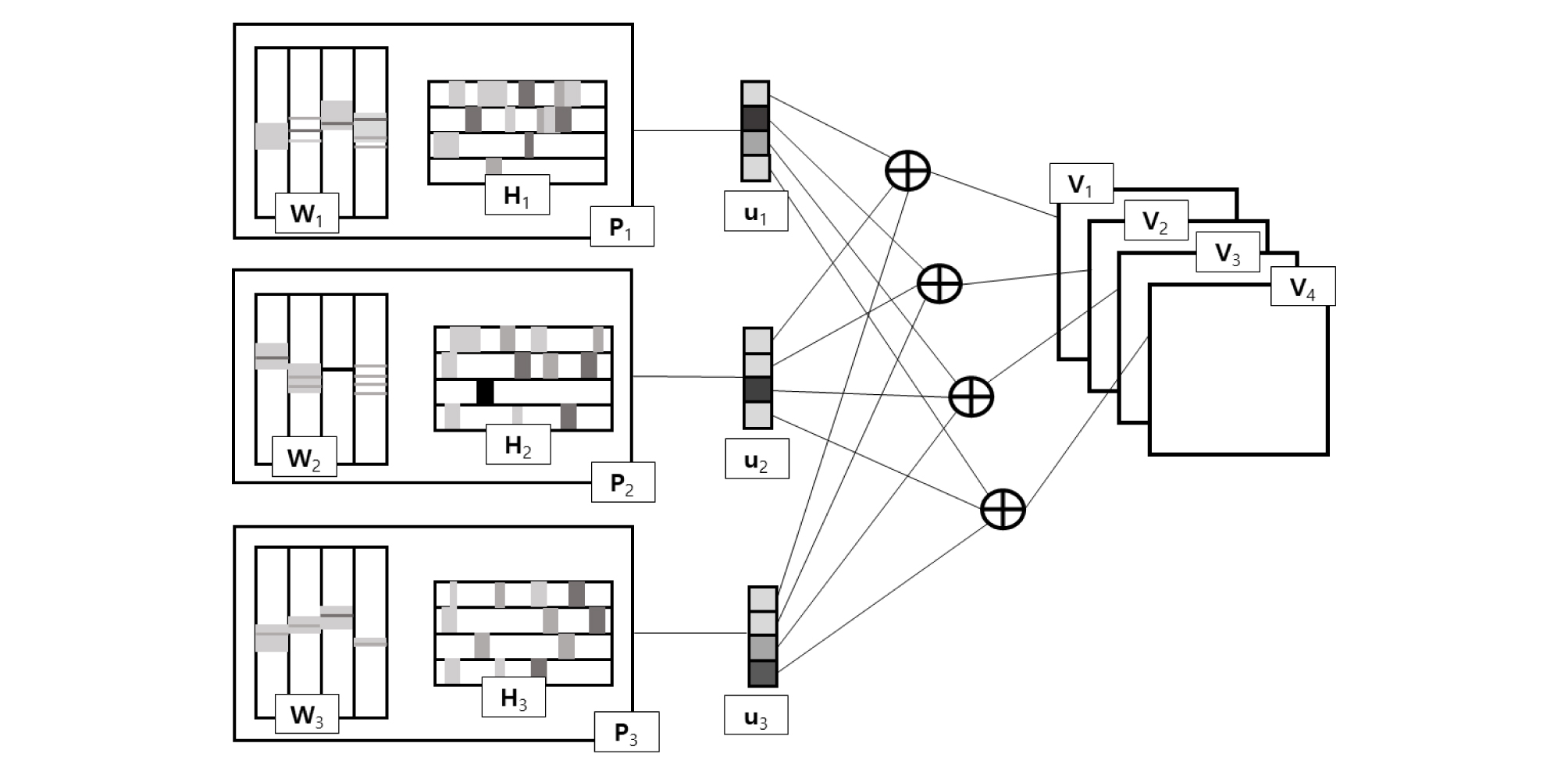
여기서 vm,kn, xm,kn은 각각 행렬 Vm, Xm의 (k, n)번째 원소를 의미하고, Vm은 Fig. 3에서 보는 바와 같이 MC-NMF의 대상이 되는 m번째 행렬을 나타낸다. 또한
| $$w_m(k)=\frac1{max(1,\left|G(\cos^{-1}({\displaystyle\frac c{2\upsilon}}{\displaystyle\frac{f_k}{f_0}})-\psi_{0,m})\right|)}$$ | (8) |
| $$\psi_{f_k}=\cos^{-1}(\frac c{2\upsilon}\frac{f_k}{f_0})$$ | (9) |
이며, fk는 k번째 주파수 빈의 주파수를 의미하고, ψ0,m은 m번째 빔형성기의 목표 방위, max(a,b)는 a,b 중 큰 값을 선택하는 함수를 의미한다. 본 논문에서는 위의 과정을 ODS라 명명하였다.
기존의 소나 시스템에서 자기 도플러 제거(Own Doppler Nullification, ODN) 시스템을 통하여 해당 성분을 제거하는 경우들이 있는데, 이는 위의 ODS와 중복된 역할을 수행한다. 따라서 ODN을 포함하는 시스템에 본 알고리즘을 적용하는 경우 ODS는 적용하지 않는다.
3.2 빔공간 영역의 MC-NMF
빔형성기를 통과한 크기 스펙트럼은 빔공간-주파수-시간 영역의 3차원 텐서가 된다. 해당 데이터에 Reference [10]에 나타난 빔공간 MC-NMF 모델을 적용하면, 다음과 같이 모델을 구성할 수 있다.
| $$\upsilon_{m,kn}=\sum_ju_{mj}p_{j,kn}+e_{m,kn},$$ | (10) |
여기서 um,j는 j번째 반사체의 m번째 빔형성기에 대한 이득, em,kn은 잡음을 나타내며, j번째 반사체의 크기스펙트로그램 Pj의 (k,n)번째 원소인 pj,kn은 다음과 같이 모델링된다.
| $$p_{j,kn}=\sum_{r\in K_j}w_{kr}h_{rn},$$ | (11) |
여기서 wkr은 주파수 기저 행렬 W의 (k,r)번째 원소, hrn은 시간 기저 행렬 H의 (r,n)번째 원소를, 그리고 Kj는 j번째 반사체에 해당하는 기저들의 집합을 의미한다.
위의 모델에서 주파수 기저 W와 시간 기저 H, 그리고 반사체 별 빔형성기 이득 uj을 추정하기 위하여 다음과 같이 최적화할 비용 함수를 정의한다.[9,10]
| $$C(w_{kr},h_{rn},u_{m,j})=d_{IS}(\upsilon_{m,kn}{\left|\widehat\upsilon\right.}_{m,kn}),$$ | (12) |
여기서 이며, dIS(x|y)는 다음과 같은 Itakura-Saito 거리 함수를 의미한다.[9]
| $$d_{IS}(x\left|y)\right.=\frac xy-\log(\frac xy)-1.$$ | (13) |
주파수 기저 행렬 W 시간 기저 행렬 H의 j번째 반사체에 해당하는 부분을 각각 Wj, Hj라 하자. 이때 각 기저 행렬과 빔형성기 이득을 다음의 과정을 반복하여 추정한다.
| $$u_{m,j}\leftarrow u_{m,j}\frac{1_{1\times K}\left[\widehat V_m^{-2}\otimes V_m\otimes(W_jH_j)\right]1_{N\times1}}{1_{1\times K}\left[\widehat V_m^{-1}\otimes(W_jH_j)\right]1_{N\times1}}$$ | (14) |
| $$W_{,j}\leftarrow W_{,j}\frac{{\displaystyle\sum_{m=1}^M}u_{m,j}(\widehat V_m^{-1}\otimes V_m)H_j^T}{\sum_{m=1}^Mu_{m,j}\widehat V_m^{-1}H_j^T},$$ | (15) |
| $$H_{,j}\leftarrow H_{,j}\frac{{\displaystyle\sum_{m=1}^M}(u_{m,j}W_j)^T(\widehat V_m^{-2}\otimes V_m)}{{\displaystyle\sum_{m=1}^M}(u_{m,j}W_j)^T\widehat V_m^{-1}},$$ | (16) |
여기서 Va는 행렬 V의 원소 단위의 a제곱을 의미하며 (a = -1일 때 역행렬 연산이 아닌 원소 단위의 역수 연산을 의미함에 유의할 것), A⊗B, 는 각각 두 행렬 A,B의 원소 단위의 곱셈과 나눗셈을 의미한다. 또한 1a×b는 모든 원소가 1인 a×b크기의 행렬을 의미한다. Eqs. (14)-(16)의 연산을 수렴할 때까지 반복하거나, 혹은 사전에 정해진 횟수만큼 반복하여 각 기저 행렬과 빔형성기 이득을 추정한다.
Fig. 3에서 보는 바와 같이 빔공간 MC-NMF 기술은 특정 주파수 구조의 신호(행렬 W)가 특정 시간 동안 활성화(행렬 H)되며, 그 신호가 특정 방위 응답(벡터 uj)을 가지는 것을 가정하고 있다. 지속파 신호가 표적에 반사되어 수신되는 경우 위와 같이 특정 주파수 구조의 신호가 짧은 시간동안 활성화되며 표적의 방향에 따라 특정 방위 응답을 가지므로, 지속파 신호를 사용하는 능동 소나의 경우 위와 같은 가정을 만족하는 것을 알 수 있다.
3.3 표적 기저 선택 및 방위, 주파수, 시간 추정
산란체가 소나로부터 다양한 거리에 걸쳐서 넓게 분포되는 반면 표적은 특정한 위치에 존재하므로, 일반적으로 잔향 신호의 길이에 비해 표적 반사음은 시간 축에서 짧은 구간에 존재한다. 따라서 예상되는 표적 반사음의 길이를 np라 하면, 표적 반사음에 해당하는 기저는 연속되는 np개의 시간프레임 동안 강한 에너지를 가질 것으로 예상할 수 있다. 따라서, 다음과 같이 표적 반향음 기저 인덱스 rtarget은 다음과 같이 np개의 연속적인 프레임의 크기가 가장 큰 시간 기저의 인덱스로 정의한다.
| $$r_{target}=argmax_r\overline h(r),$$ | (17) |
여기서
| $$\overline h(r)=max_i{\sum_{n=\left\lfloor i-n_p+1\right\rfloor}^i}_1h_{rn}$$ | (18) |
이고, 1 기호는 괄호 안의 값의 하한이 1임을 의미한다.
Eq. (17)과 같이 rtarget을 구함으로써 표적 반향음 기저를 찾은 후에는, 다음과 같이 um,j를 이용하여 방위를 추정한다.
| $$m_{target}=argmax_mu_{m,j_{target}}$$ | (19) |
여기서 jtarget은 rtarget ∈ Kjtarget인 반사체 번호 j를 의미하며, mtarget은 표적 반향음의 방위를 지향하는 빔형성기의 인덱스를 의미한다. 위와 같은 방법으로 표적 반향음의 주파수와 시간 구간도 주파수 기저와 시간 기저를 통해 추정할 수 있으며, 그 과정은 다음과 같다.
| $$k_{target}=argmax_kw_{kr_{target}}$$ | (20) |
| $$n_{target}=\{n\left|h_{r_{target}n}>\eta\right.\}$$ | (21) |
여기서 ktarget과 ntarget은 각각 표적 반향음의 주파수 빈 인덱스와 시간 프레임 인덱스를 나타낸다.
IV. 실험 결과 및 토의
본 논문에서 고안한 알고리즘의 성능을 살펴보기 위하여 수중 잔향 환경에서 표적이 존재하는 상황을 가정하여 시뮬레이션을 진행하였다. 표적 반향음과 잔향음은 Eq. (1) 및 Eq. (3)과 같이 합성되었으며, 이때 잔향음은 Abraham et al.[12]의 잔향 모델을 이용하여 합성되었다. 방사된 핑 신호로는 1 s 길이의 지속파 신호를 사용하였으며, 표적의 정규화 도플러 비(f/f0)는 1.015로 가정하였다. 표적 반향음의 신호대잔향비(Signal-ro-Reverberation Ratio, SRR)는 |G(ψ-ψ0,m)|에 따라 변하며, 이는 표적의 방위가 동일한 방위를 가지는 빔형성기 출력에서 최대값을 가지게 된다. 본 논문에서는 이를 최대신호대잔향비라고 명명하였으며, -10 dB부터 -2 dB까지 2 dB 간격으로 변화시키며 결과를 관찰하였다.
MC-NMF 분석을 위한 스펙트로그램 데이터를 얻기 위하여 133 ms 길이의 Hamming 윈도우를 25 % 중첩하여 단시간 푸리에 변환(short-time Fourier transform)을 적용하였으며, Eq. (21)에서 표적 반향음이 존재하는 구간을 판정하기 위한 문턱값 η은 다음과 같은 값을 사용하였다.
| $$n=0.2max_nh_{r_{target}n}.$$ | (22) |
빔형성기는 수신기의 진행 방향 기준 0°부터 180°까지 5° 간격으로, 총 37개의 빔형성기가 존재한다고 가정하였고, 각 빔형성기의 null-to-null 빔 폭은 10°로 가정하였다.
MC-NMF 알고리즘의 파라미터는 다음과 같다. 반사체의 개수는 30개로, 각 반사체 당 기저의 개수는 4개로 설정되었으며, 따라서 총 120개의 기저가 존재하도록 설정되었다. 기저 및 반사체의 개수는 알고리즘의 결과에 크게 영향을 미치지는 않았으나, 여러 방향의 반사음들을 모델링하는 기저의 개수이므로 충분한 크기 이상의 값을 설정하는 것이 바람직하다. Eqs. (14)-(16)의 기저 추정 알고리즘의 반복 횟수는 100회로 설정하였다.
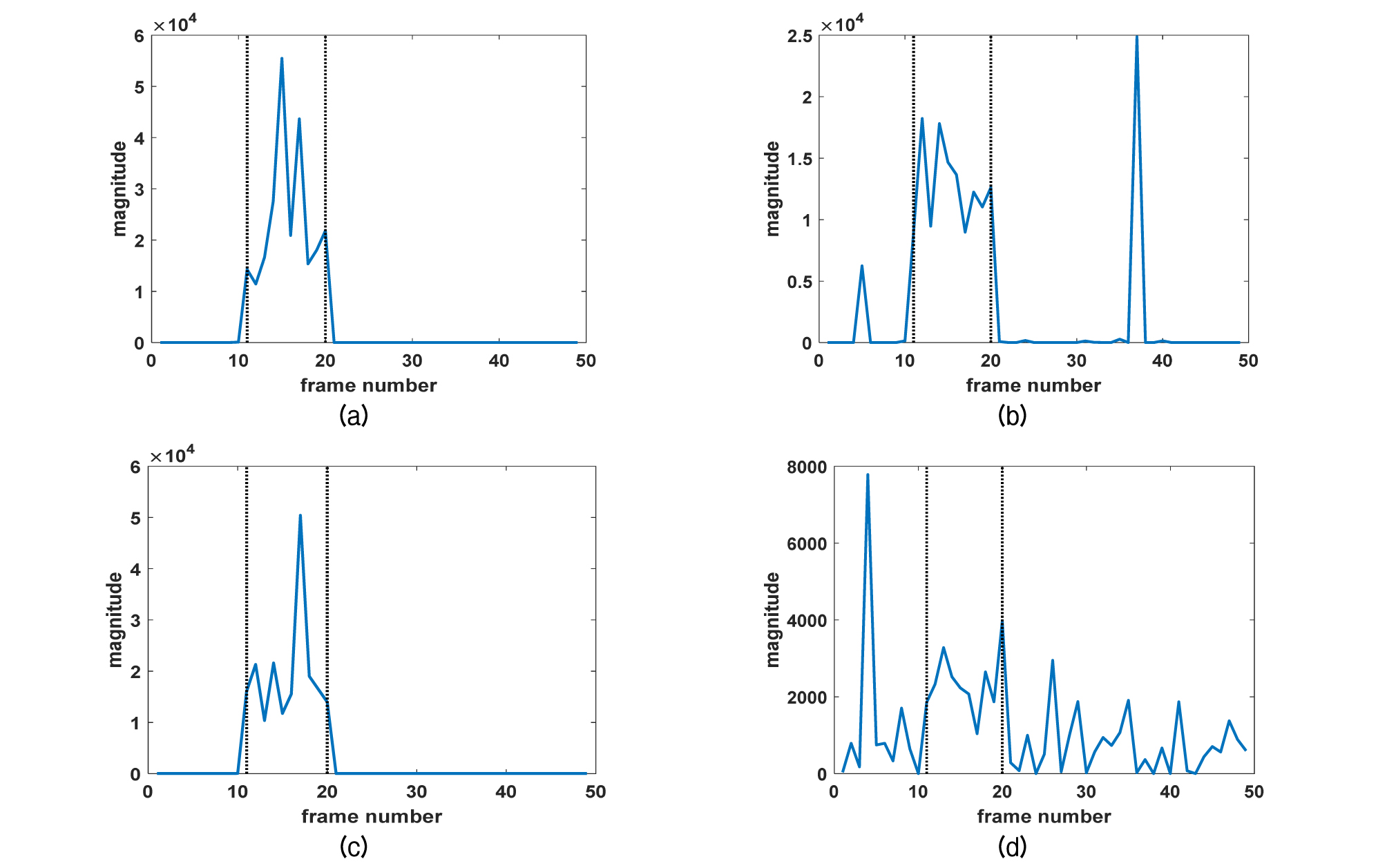
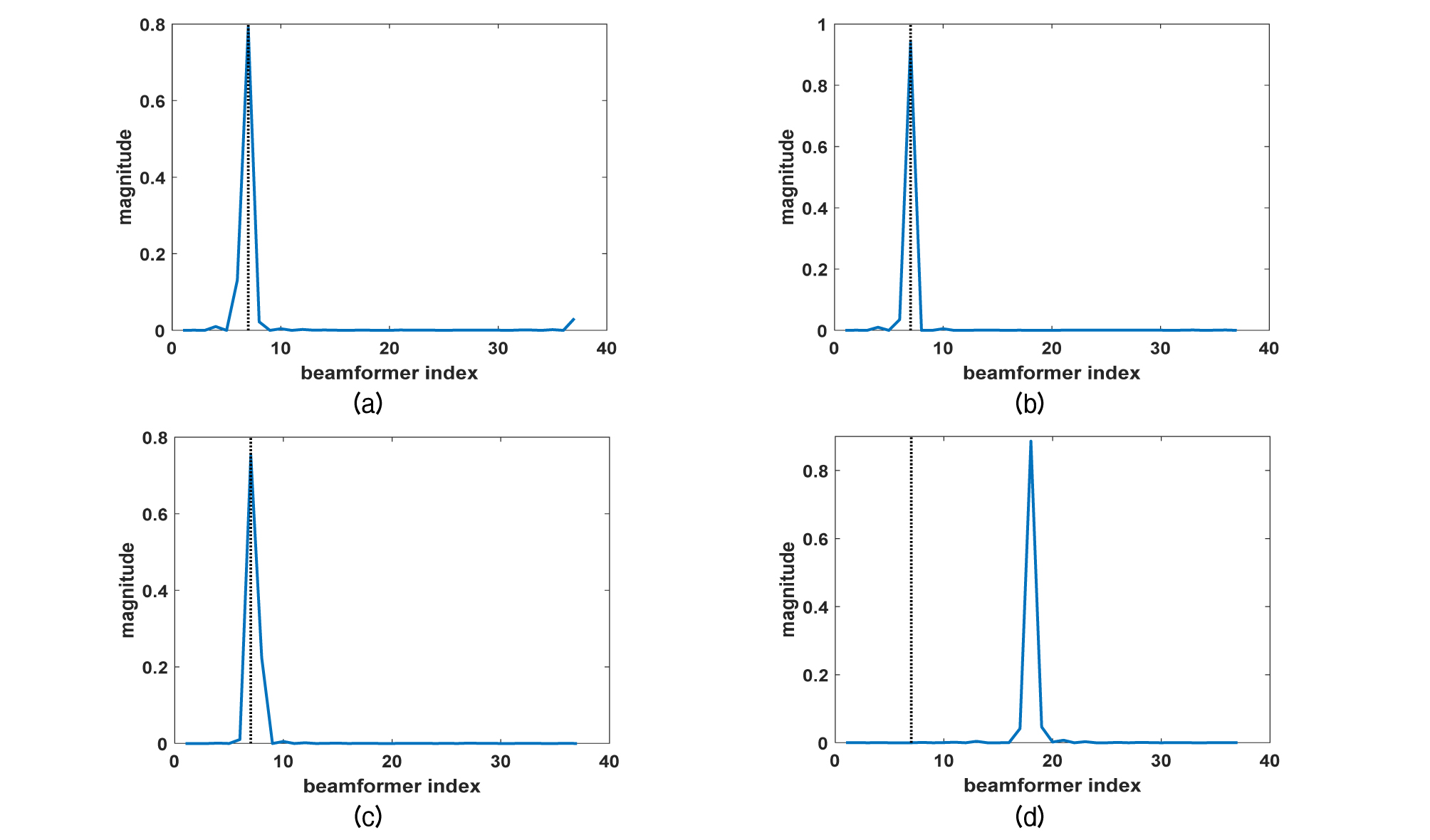
제안하는 알고리즘을 이용하여 시간 기저, 주파수 기저, 그리고 반사체별 빔 이득으로 분석한 후, Eq. (17)을 이용하여 기저를 선택한 결과가 Figs. 4~6에 도시되어 있다. Fig. 4는 각 SRR 환경에서 알고리즘의 결과로 선택된 주파수 기저를 나타내고 있으며, Eq. (20)과 같이 최대값을 가지는 주파수를 표적 반향음의 주파수로 추정하게 된다. -2 dB 환경에서의 결과는 -4 dB와 유사하기 때문에 따로 도시하지 않았다. Fig. 4의 결과를 살펴보면, 주어진 환경에서 모두 표적 반향음의 주파수를 비교적 잘 추정하고 있는 것을 볼 수 있으나, -10 dB와 같이 잔향 환경이 나빠질 경우 주파수 기저의 모양이 다소 넓어지는 것을 확인할 수 있다.

Fig. 5은 알고리즘의 결과로 선택된 시간 기저를 나타내고 있으며, -4 dB에서 -8 dB까지는 표적 반향음이 존재하는 구간을 비교적 잘 추정하고 있으나, -10 dB의 경우 표적 반향음이 존재하지 않는 구간의 값도 다소 크게 나타나는 것을 확인할 수 있다. Fig. 6은 선택된 반사체의 빔형성기 별 이득을 나타내고 있으며, Eq. (19)와 같이 최대값을 가지는 빔형성기의 방향을 방위로 추정하는 것을 고려할 때 -8 dB까지는 방위를 잘 추정하고 있으나, -10 dB의 환경에서는 방위를 오판하고 있음을 확인할 수 있다.
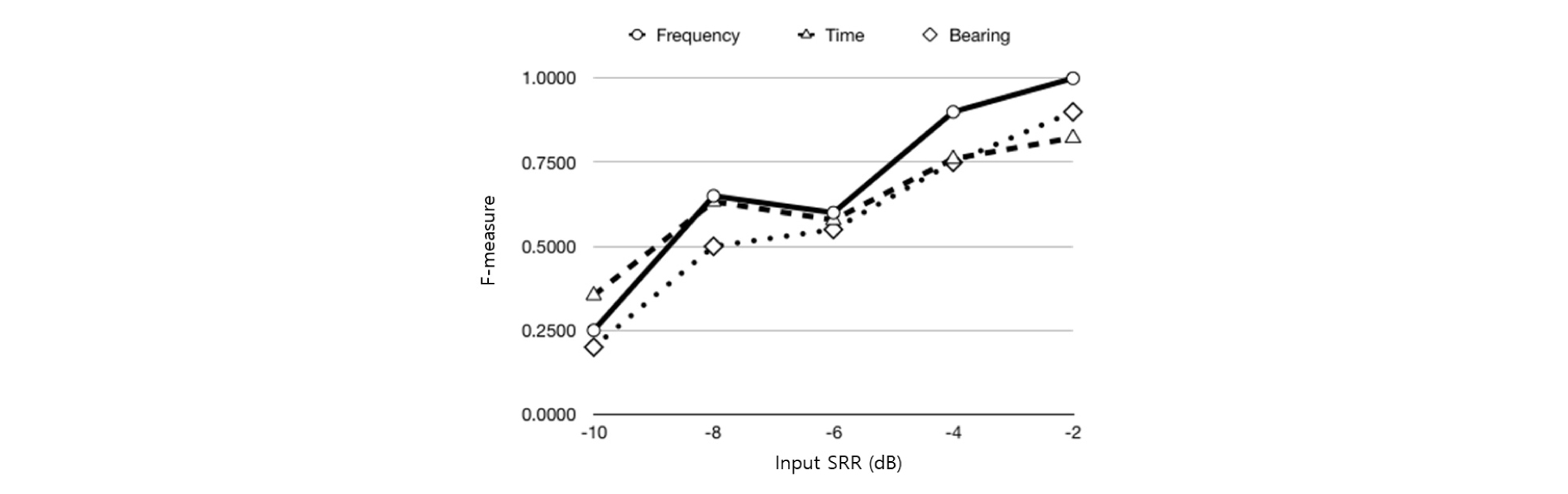
추정 성능을 수치적으로 분석하기 위하여 각 SRR 환경마다 20번의 반복 실험을 수행한 후, 추정 결과를 다음과 같은 F-measure를 통해 나타내었다.
| $$F-measure=\frac{2\times precision\times recall}{precision+recall},$$ | (23) |
| $$precision=\frac{TP}{TP+FP},$$ | (24) |
| $$recall=\frac{TP}{TP+FN},$$ | (25) |
여기서 TP는 표적 반향음의 시간, 주파수, 방위 등을 맞게 추정한 개수를 나타내고, FP는 표적 반향음의 시간, 주파수, 방위 등을 추정했으나 틀린 개수, 그리고 FN은 실제 표적 반향음의 시간, 주파수, 방위 중 추정하지 못한 개수를 나타낸다. Fig. 7은 각 SRR환경에 대한 F-measure 결과 값을 그래프로 도시하였으며, 시간, 주파수, 방위 모두 SRR 환경이 좋을 때에는 상대적으로 좋은 성능을 보이지만, -10 dB와 같이 SRR 환경이 가혹한 경우 성능이 저하됨을 확인할 수 있다. References [6]의 실험에서 기존의 알고리즘도 -13 dB의 SRR 조건 하에서 거짓 피크 값들이 발생하는 것을 고려하였을 때, -10 dB의 SRR 조건에서 성능이 저하되는 것이 다른 알고리즘의 수준에 비해 크게 떨어지는 것이라고 판단되지는 않는다. 그러나 기존의 알고리즘에 비해 크게 개선되었다고 보기도 어려우므로, 향후 성능의 개선이 필요하다고 판단된다.
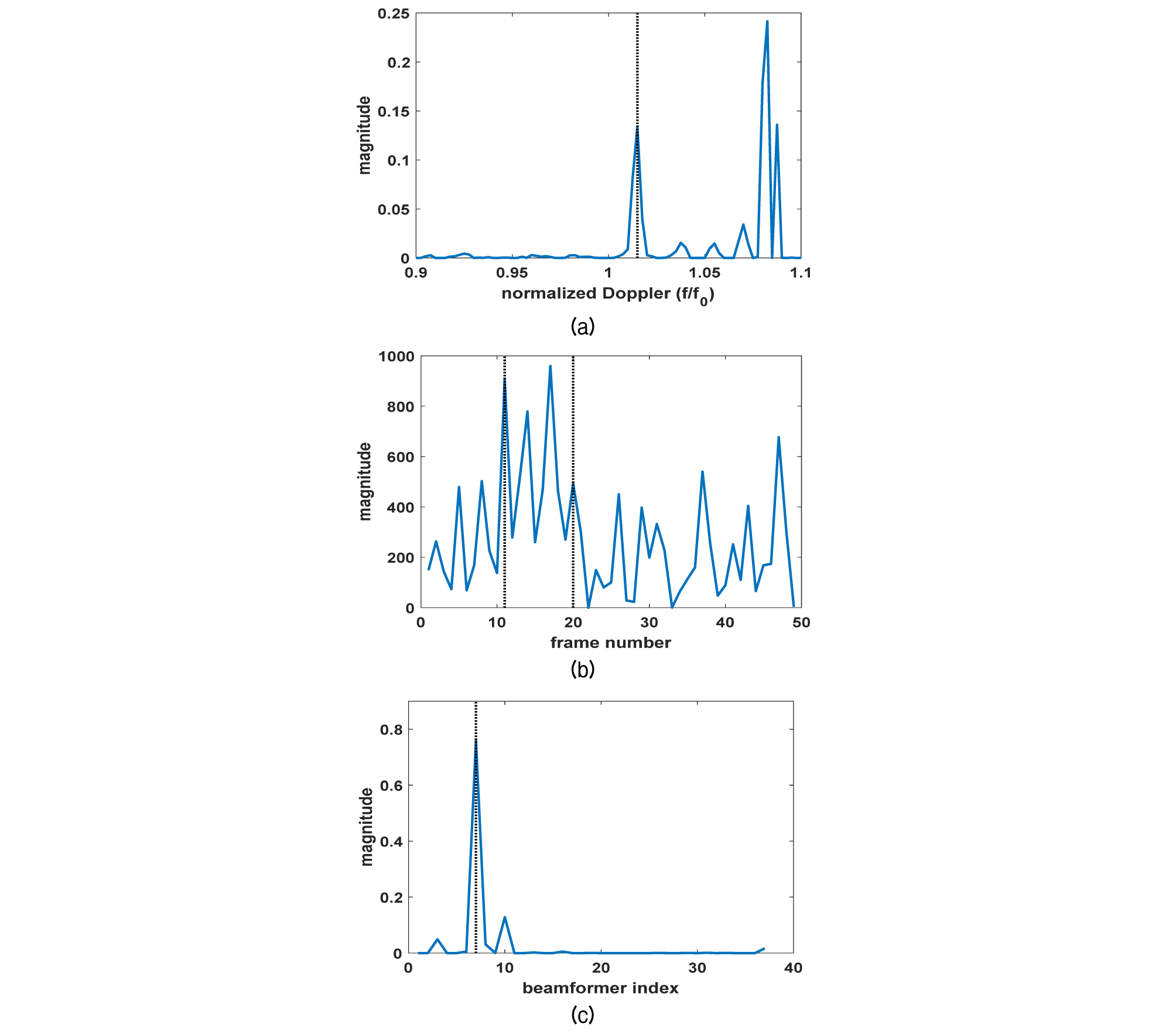
이와 같은 성능 저하는 MC-NMF 알고리즘 자체의 문제점이라기보다는 기저를 선택하는 알고리즘에서 기인한 것으로 보인다. Fig. 8은 Figs. 4~6의 -10 dB SRR의 결과에서 모든 기저의 값을 살펴본 후 표적 반향음 성분을 포함하는 기저를 직접 선택한 것이다. Fig. 8의 결과를 살펴보면 Figs. 4~6의 결과에 비해 표적 반향음 성분을 더욱 뚜렷이 확인할 수 있으며, 특히 방위 추정 결과에 있어 개선된 결과를 보임을 확인할 수 있다. 따라서 MC-NMF의 기저 분석 알고리즘 보다는 기저 선택 및 시간,주파수, 그리고 방위 추정 알고리즘을 보완함으로써 성능을 향상시킬 수 있을 것으로 판단되며, 향후 이러한 부분을 중점적으로 연구할 계획이다.
V. 결 론
본 논문에서는 잔향 환경에서 표적 반향음을 검출하기 위하여 MC-NMF 모델에 기초한 신호 분석 알고리즘을 고안하고, 결과에 대한 분석을 수행하였다. 본 논문에서 고안한 알고리즘은 여러 방위의 빔형성기를 통과한 신호를 수집한 후, 이를 3차원 텐서로 모델링하여 MC-NMF 기법을 통해 주파수 기저, 시간 기저, 그리고 빔형성기 이득으로 분석한다. 이후 표적 반향음을 포함하는 기저를 선택한 후 해당 기저의 데이터를 이용하여 표적 반향음의 주파수, 시간, 그리고 방위를 추정하게 된다.
제안하는 알고리즘의 동작을 분석하기 위하여 시뮬레이션을 수행하였다. SRR이 -10 dB ~ -2 dB인 환경에 대해 MC-NMF 기저 추정 및 선택 결과를 분석하였으며, 시뮬레이션 수행 결과 제안하는 알고리즘이 잔향 환경에서 표적 반향음의 주파수, 시간, 그리고 방위를 추정할 수 있음을 보였으나, 낮은 SRR 환경에서는 성능 개선의 필요성이 있음을 확인할 수 있었다. 또한 낮은 SRR 환경의 결과를 분석한 결과 기저 선택 알고리즘을 수정함으로써 개선의 여지가 있을 것으로 판단되며, 향후 추가적인 연구를 통해 이러한 부분을 개선할 예정이다.
