

I. 서 론
II. 등화기와 위상고정루프
2.1 등화기의 개념과 구조
2.2 위상고정루프의 개념과 구조
III. 호수 및 해상 실험 결과
3.1 호수 실험 결과
3.2 해상실험 결과
IV. 결 론
I. 서 론
일반적으로 통신은 지상에서 전파를 이용한 경우를 생각한다. 그러나 최근에는 지상 통신이 아닌 수중 통신에 있어서도 개발이 이루어지고 있다. 수중통신에서는 지상과는 달리 환경에 의해 제한 요소들이 많이 존재한다. 음파를 사용하는 수중통신에서는 사용 가능한 주파수 대역이 제한적이며, 거리에 따른 신호의 감쇠영향도 매우 크다. 또한 수중채널을 통과시에는 다중경로와 도플러 주파수에 의한 영향이 지상 통신에 비해 상대적으로 크다. 이미 이러한 문제들을 해결하기 위한 연구는 많이 진행되었다. Reference [1]에서는 얕은 바다에서 적용할 수 있는 판정 궤환 등화기(Decision Feedback Equalizer, DFE)에 대한 연구가 이루어졌다. 그리고 Reference [2]에서는 수중에서 송신기와 수신기의 상대적인 움직임에 의해 발생되는 도플러 주파수의 영향과 개선 방향에 대해 기술하였다. 또한 위상고정루프(Phase Locked Loop, PLL)를 사용하여 도플러 추적과정을 보여주고 있다.
등화기와 위상고정루프를 맞물려서 사용하는 이유는 Reference [3]에 기술되었다. 또한, Reference [4]에서는 위상편이(Phase Shift Keying, PSK) 변조 신호에 대한 채널 등화기와 위상 동기 알고리즘의 동작을 설명하였으며, 도플러 주파수가 존재하는 환경의 성능을 제시하고 있다.
등화기만 동작하는 경우는 도플러 주파수가 없는 환경에서 동작이 가능하지만, 위상변화에도 비트오류 성능이 크게 악화된다. 그러므로, 도플러 주파수가 존재하는 환경일 때, 주어진 프리엠블(알고 있는 데이터) 구간 이내에서 수렴하기 위해서는 등화기에 위상변화를 보상할 수 있는 위상고정루프를 결합하여 동시에 사용하여야 한다. 또한, 빠른 수렴속도와 수렴 후 안정적인 동작이 이루어져야 한다.
본 논문에서는 Binary PSK(BPSK) 변조신호를 사용하였으며, 판정 궤환 등화기와 방식의 위상 검출기를 갖는 위상고정루프를 사용하였다. 위상고정루프는 주파수 변화를 추적할 수 있도록 2차 루프필터를 사용하였다. 또한, 데이터 구간에서는 판정지향 방식 위상 검출기를 사용하였다. 호수실험과 해상실험을 통해 등화기와 위상고정루프의 수렴과정과 비트오류 발생 패턴을 확인할 수 있었으며, 안정적으로 수렴하는 경우는 비트오류가 발생하지 않음을 확인하였다.
본 논문은 우선 II장에서 등화기와 위상고정루프에 대한 개념적 구조에 대해 설명하며, III장에서는 호수 실험 및 해상실험 결과를 제시하였다. 최종적으로, IV장에서는 본 논문의 결론을 제시하였다.
II. 등화기와 위상고정루프
Fig. 1은 프리엠블과 랜덤 데이터로 구성된 송신신호 구조이다. 송신 신호는 우선 알고 있는 데이터에 해당하는 프리엠블 데이터와 보내고자 하는 랜덤 데이터로 구성된다. Fig. 2는 수중 음향통신에서의 대략적인 송수신기 구조를 나타낸다.[5] 수신 신호는 기저대역 신호로 변환 된 후 필터링 과정을 거쳐 프레임 동기가 진행된다. 본 논문에서는 수신 신호의 시작점을 찾는 동작(프레임 동기)을 완료한 후 데이터를 복구하는 과정(BPSK demodulator)에 중점을 두었다.
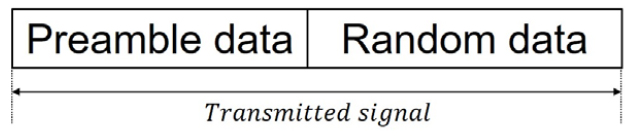
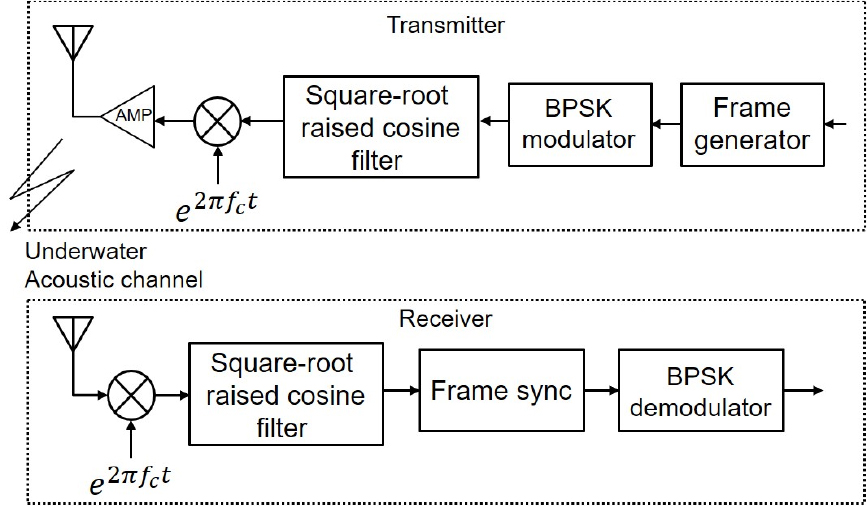
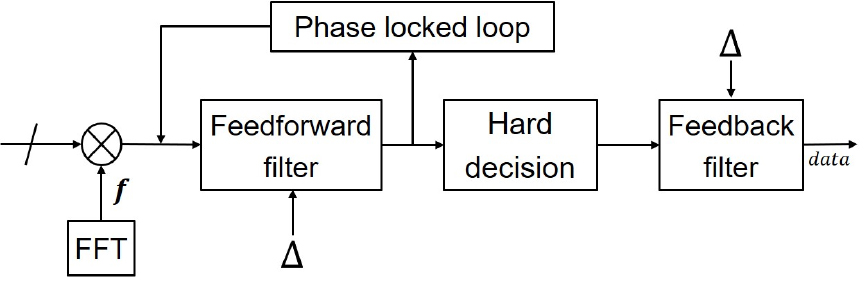
Fig. 3은 수중 음향통신에서 데이터를 복구하기 위해 필요한 등화기와 위상고정루프의 구조이다. 등화기는 입력신호가 채널 통과과정에서 발생하는 다중경로를 제거하기 위해 사용하고, 위상고정루프는 도플러 주파수를 보상하기 위해 사용한다. 등화기와 위상고정루프는 서로 독립적으로 동작하지 않으며, 서로 상호 보완하면서 채널영향을 극복하게 된다. 즉, 움직임에 의해 발생되는 도플러 주파수는 등화기의 성능을 악화시키거나 수렴되지 않는 상황을 일으킨다. 이러한 경우는 데이터 복구가 불가능하다. 또한, 등화기에 의해 다중경로가 제거되지 않으면 위상고정루프는 위상 변화를 추적하기 어렵다. 본 논문에서는 다중경로와 도플러 주파수를 제거하면서 등화기와 위상고정루프가 프리엠블 구간 이내에서 안정적으로 수렴하는 것을 목표로 한다. 또한, 고속푸리에 변환(Fast Fourier Transform, FFT)을 이용하여 도플러 주파수를 추정하여 등화기 입력신호에 보상한다. 도플러 주파수를 보상하면, 초기에 등화기와 위상고정루프가 보다 빠른 속도로 수렴할 수 있다.
2.1 등화기의 개념과 구조
본 논문에서 사용하는 등화기의 구조는 판정 궤환 등화기이다. 판정 궤환 등화기는 순방향필터와 궤환 필터가 결합되어 있다. 순방향 필터로 입력 값이 들어오면 출력 값을 경판정 후 궤환 필터의 입력 값으로 사용하게 된다. 순방향과 궤환 필터는 지연선(Tapped Delay Line, TDL)필터 구조이다. 따라서 판정 궤환 등화기는 N개의 필터 탭을 갖는 유한 임펄스 응답(Finite Impulse Response, FIR) 필터가 된다. FIR 구조의 등화기는 입력신호가 들어올 때마다 다중경로를 보상할 수 있는 최적의 계수 값들을 찾아낸다. 필터 계수 값들은 필터가 동작할 때 마다 값을 통해 갱신된다. 필터 계수를 갱신하는 방법은 평균 제곱오차(Mean Square Error, MSE)이며, 본 논문에서 사용한 등화기의 필터는 최소 평균 제곱법(Least Mean Square Method, LMS)알고리즘을 사용하였다.
MSE수식은 등화기 출력 값과 송신 데이터비트의 차를 제곱해 평균을 취한 것으로 아래와 같이 나타낸다.[6]
여기서 는 등화기의 출력, 는 송신된 데이터 비트, 는 등화기 탭 간격인 비트길이, 은 수신 신호의 비트 인덱스, 는 필터의 지연을 가리킨다.
또한, MSE를 최소화하기 위해 LMS알고리즘을 사용하였다. LMS알고리즘은 필터의 계수 값을 최소화한다. 필터의 계수 값은 이며 아래와 같다.
여기서 는 신호 행렬이며,는 등화기와 채널의 지연 샘플 개수이다. MSE를 최소화하여 를 구하는 방법은 미분을 이용하는 것이다. MSE의 미분 은 아래와 같이 정의된다.
여기서 은 비트 인덱스, 은 자기 상관 행렬, 은 상관 벡터, y는 입력신호의 채널 통과 후 출력 값이다. 채널 상황에 따라 시변동성이 존재하면, 을 갱신하기 위해 MSE 대신 자승오차(Square Error, SE)를 통해 동작하며 아래와 같은 식을 사용한다.
여기서 는 입력신호와 출력신호의 차이다. 이상적인 경우 등화기의 자승오차 그래프는 0으로 수렴한다.
2.2 위상고정루프의 개념과 구조
Fig. 4는 위상고정루프의 기본 구조이며, 위상 검출기, 루프필터, VCO로 이루어져 있다.
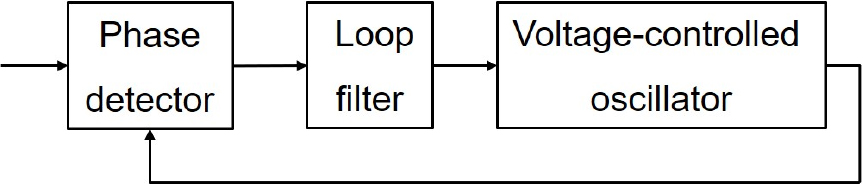
Fig. 5는 방식의 위상 검출기 구조이다. 방식은 순방향 필터 출력의 I(In-Phase)와 Q(Quadrature- Phase)값을 통해 위상 검출이 이루어진다. 위상 검출 과정에서 랜덤 데이터는 성능저하를 발생시킨다. 프리엠블 구간은 알고 있는 데이터를 필터 출력 값에 곱해 데이터를 제거한다. 하지만, 랜덤 데이터 구간에서는 순방향 필터의 출력 값을 경판정 후 곱하는 방법으로 데이터를 제거한다.
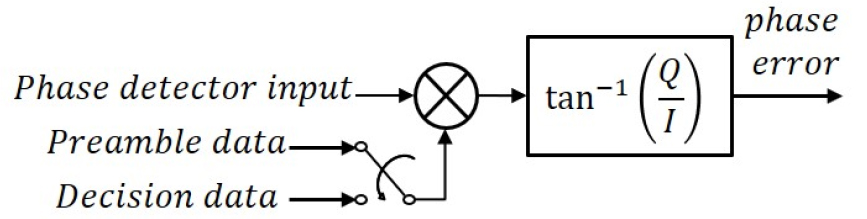
Fig. 6은 방식의 위상 검출기의 출력 평균에 해당하는 s-curve이다. 위상검출기의 s-curve는 구간에서 선형성을 갖으며, 검출범위가 넓은 것이 장점이다.
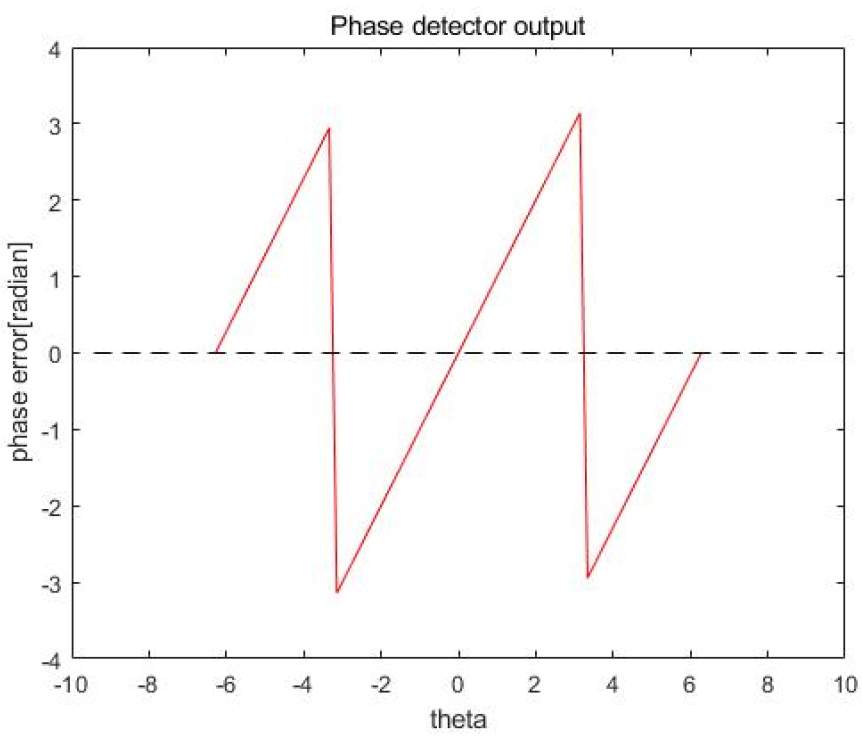
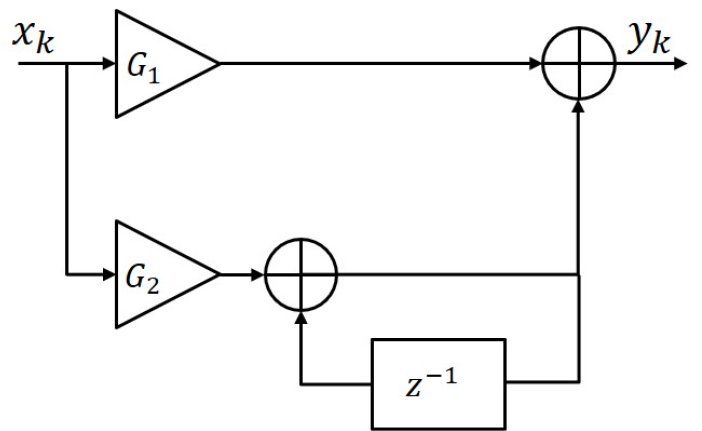
Fig. 7은 PLL의 2 차 루프필터의 구조이다.[7]는 비트 인덱스 에 대한 루프필터의 입력 값, 는 루프필터의 출력 값이다. 2 차 루프필터는 위상 검출기의 출력을 G1, G2 이득 값을 통해 루프의 추적속도 및 정상상태에서의 흔들림 정도를 결정하게 된다. 루프필터의 동작 식은 아래와 같다.
여기서 는 디지털 루프필터, 은 G2이득값의 누적 비트 인덱스이다.
VCO는 누적기이며, 출력 값은 다시 순방향 필터 입력 값에 보상하는 방식으로 위상고정루프가 동작한다.
III. 호수 및 해상 실험 결과
3.1 호수 실험 결과
등화기와 위상고정루프의 성능 확인을 위해 호수 실험을 진행하였다. Table 1은 실험환경과 실험에 사용된 시스템 파라메타이다. 송신기와 수신기 사이의 거리는 300 m이며, 송신기는 수심 25 m, 수신기는 수심 5 m지점에 위치했다. 데이터 변조는 BPSK이며, 송수신기가 고정 상태일때 실험이다. 하지만, 바람과 같은 환경적인 요인으로 인해 자연적인 이동은 존재한다.
Table 1.
Lake experiment parameters.
| Parameter | Value |
| Data modulation | BPSK |
| Transmitter depth | 25 m |
| Receiver depth | 5 m |
| Tx-Rx distance | 300 m |
| Sampling frequency | 192 kHz |
| Data rate | 100 bps |
Fig. 8은 위상고정루프와 결합된 등화기의 자승오차이다. 도플러 주파수에 대한 영향을 확인하기 위해 FFT를 이용하여 주파수를 보상한 경우(with FFT)와 주파수를 보상하지 않은 경우(without FFT)로 나누어 확인하였다. 고정상태의 실험환경에서 자승오차의 수렴 속도는 뚜렷한 차이는 없다. 호수실험에서는 FFT를 통해 얻은 도플러 주파수는 0.7 Hz이며, 고정상태이므로 이동하는 해상실험에 비해 상대적으로 작다.
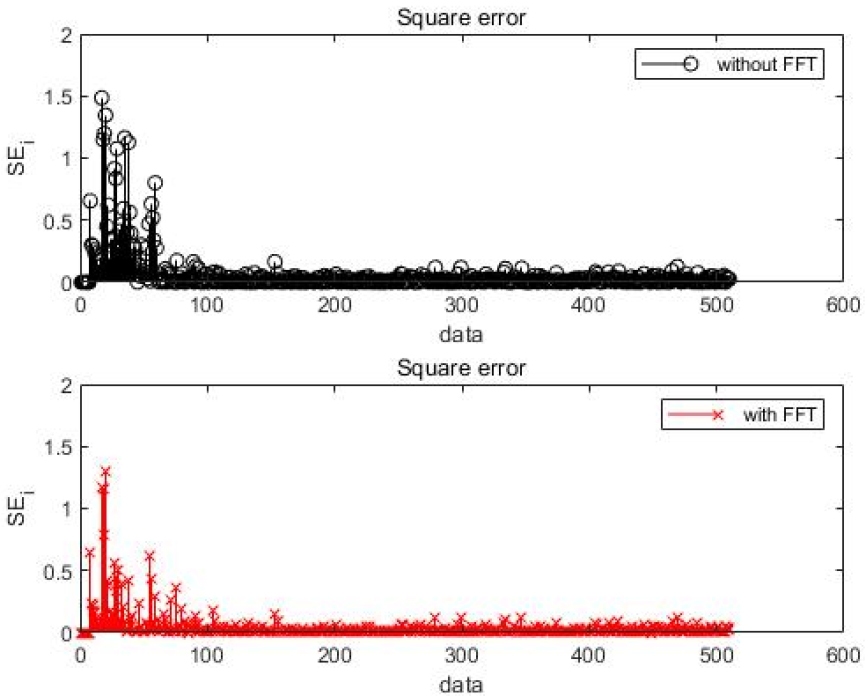
Fig. 9는 위상 검출기의 출력이다. 도플러 주파수를 보상하였을 경우와 보상하지 않았을 경우는 차이가 없으며, 모두 100 bit 지점부터는 위상 검출기의 출력이 “0”으로 수렴하여 +0.7과 –0.7정도에서 흔들리고 있음을 확인할 수 있다.
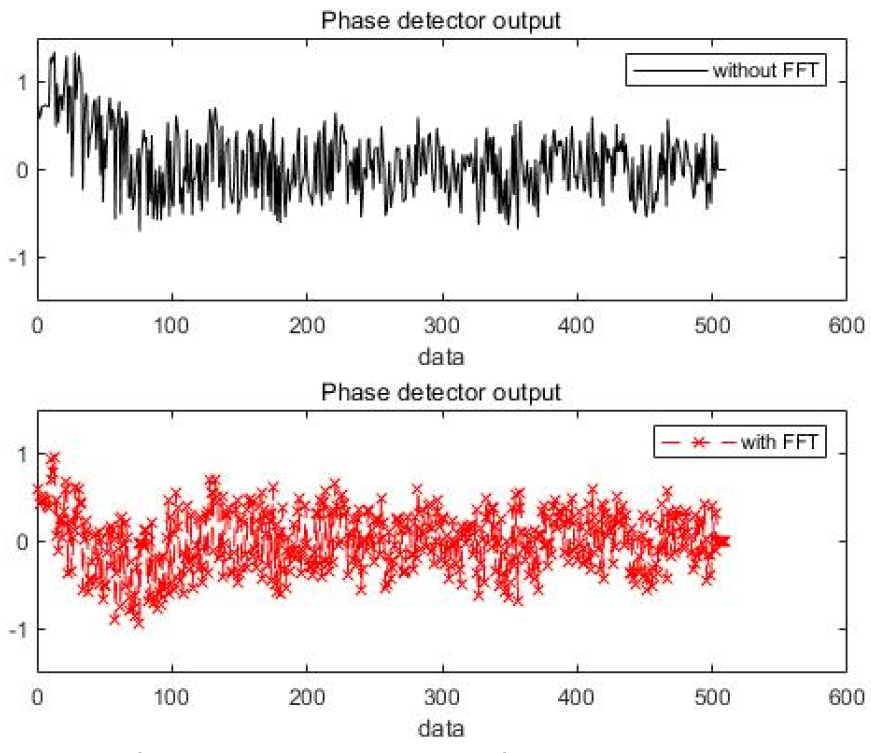
Fig. 10은 등화기와 위상고정루프가 결합 되어 동작하였을 때의 데이터 구간에서 비트오류패턴 결과이다. 비트 에러가 발생하였을 때 “1”값이 발생하도록 하였으며, 반대로 “0” 은 에러가 발생하지 않음을 의미한다. 결과적으로, 등화기와 위상고정루프가 안정적으로 수렴이 이루어진 후이므로 비트 에러가 발생하지 않음을 알 수 있다.
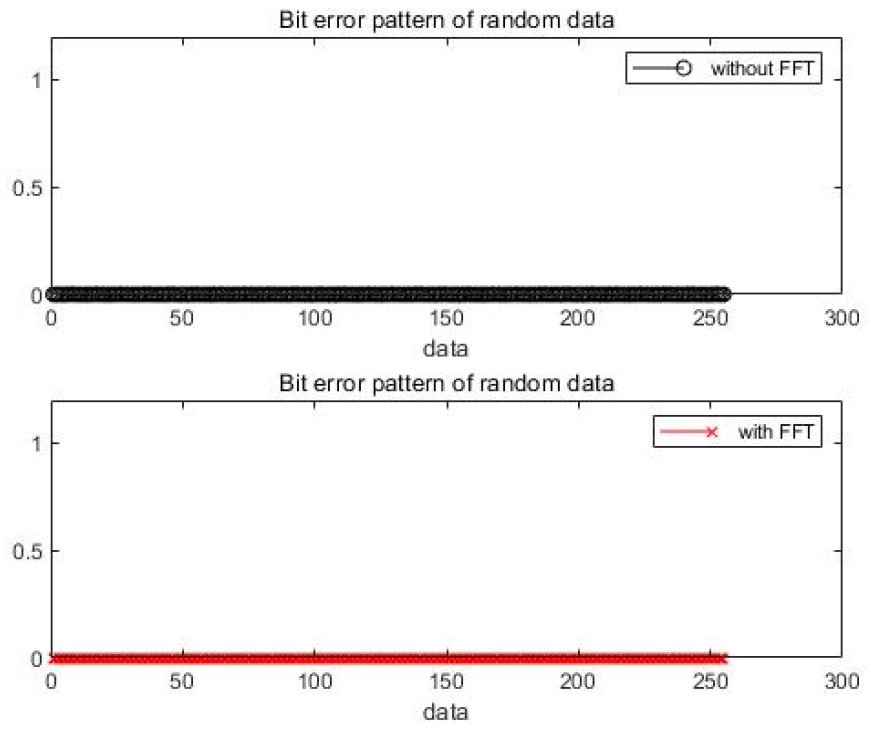
Fig. 11은 VCO의 출력 그래프이다. 주파수 보상이 이루어지지 않았을 경우는 0.7 Hz정도의 주파수를 갖는 정현파 형태로 나타난다. 하지만, 0.7 Hz의 주파수를 보상한 후에는 정현파가 아닌 위상 변화의 형태로 나타난다.
3.2 해상실험 결과
등화기와 위상고정루프의 성능을 확인하기 위해 해상 실험을 진행하였다. Fig. 12는 해상실험 환경을 그림으로 나타냈으며, Table 2는 실험에 사용된 파라메타들이다. 송수신기 간의 거리는 약 30 km이며, 3 kts속도로 이동했다. 변조 방식은 데이터율이 100 bps인 BPSK 변조를 사용하였다.
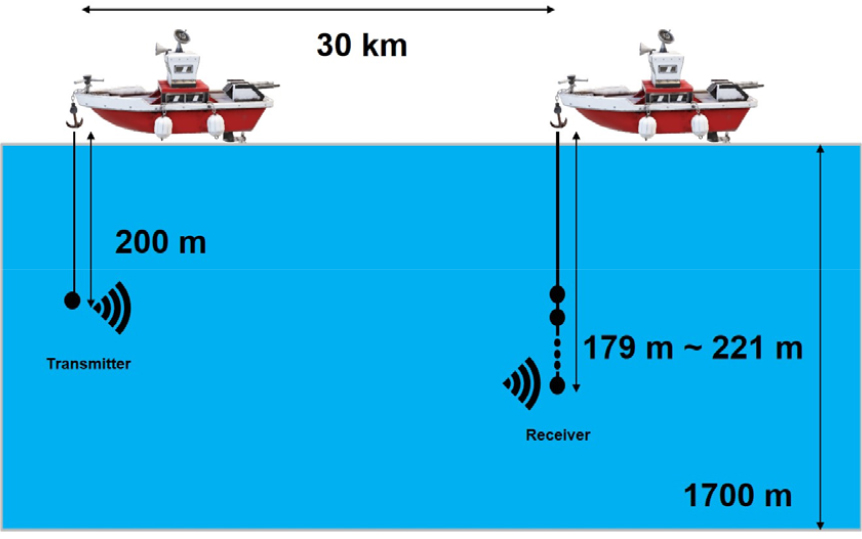
Table 2.
Parameters of the sea experiment.
| Parameter | Value |
| Center frequency | 1.8 kHz |
| Data modulation | BPSK |
| Transmitter depth | 200 m |
| Receiver depth | 179 m ~ 221 m |
| Tx-Rx distance | 30 km |
| Data rate | 100 bps |
해상실험은 이동상태에서의 실험이기 때문에 도플러 주파수는 배의 이동 속도에 따라서 변화한다. 따라서, 등화기와 위상고정루프가 프리엠블 구간이내에서 정상상태로 수렴하는 것이 중요하다. 본 실험에서 사용된 프리엠블 길이는 510 bit이며, 데이터의 길이는 338 bit이다.
Fig. 13은 등화기의 자승오차 결과이다. 두 결과는 위상고정루프를 사용하였을 때(with PLL)와 사용하지 않았을 경우(without PLL)로 나누어 나타냈다. 결과에서 알 수 있듯이 위상고정루프가 사용되지 않으면, 등화기는 수렴되지 않음을 확인할 수 있다. 결과적으로, 위상고정루프 없이 등화기만 사용되는 경우에는 모든 데이터에서 오류가 발생하게 된다. 따라서, 실제 환경에서는 등화기만으로는 데이터를 복구할 수 없으며, 반드시 위상고정루프와 결합되어 동작되어야 한다.
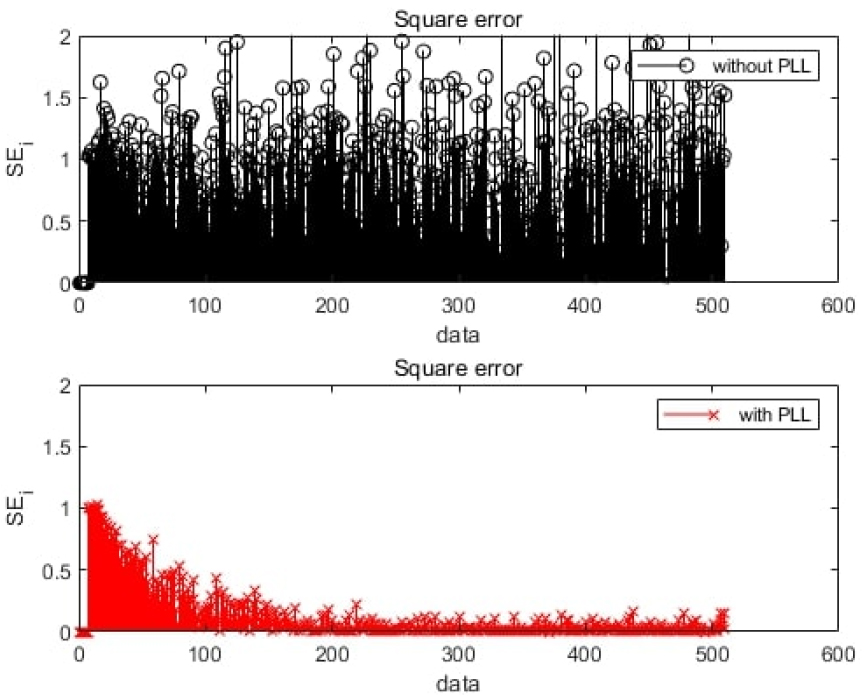
Fig. 14는 PLL과 결합된 등화기의 자승오차 결과이다. 도플러 주파수를 보상하지 않았을 경우는 약 400 bit이상에서 수렴하여 안정적으로 동작한다. 도플러 주파수 보상을 하였을 경우는 약 200 bit 이상에서 수렴함을 알 수 있다. 도플러 주파수를 보상하면 등화기의 추적속도를 크게 증가시킬 수 있다.
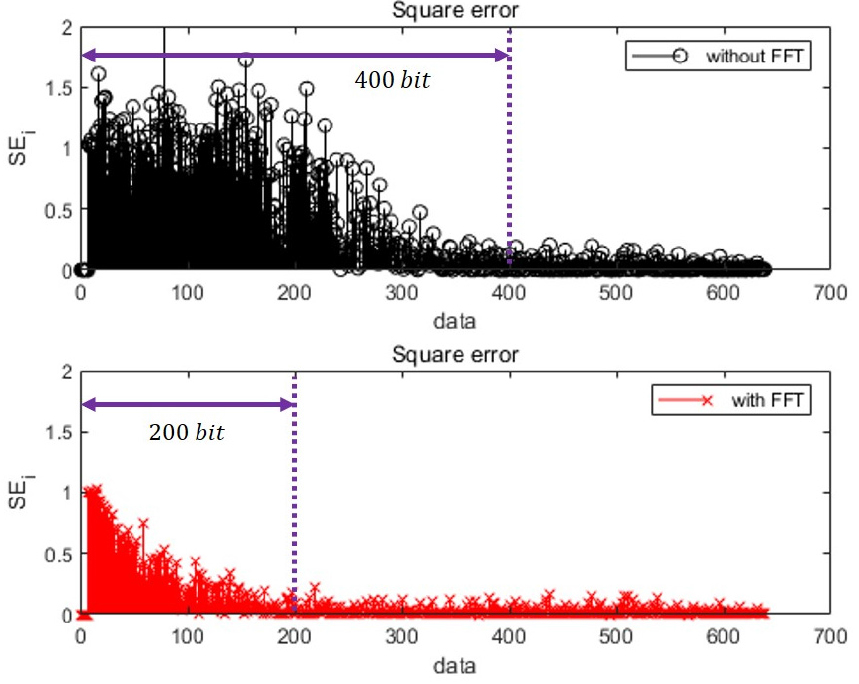
Fig. 15는 위상 검출기 출력 결과이다. 도플러 주파수를 보상하지 않았을 경우는 약 300 bit 이상에서 정상상태에 진입하는 것을 확인할 수 있다. 그러나, 도플러 주파수 보상을 하였을 경우는 약 100 bit 이상에서 수렴구간으로 진입한다. 도플러 주파수를 보상하면 위상고정루프의 수렴속도를 크게 증가시킬 수 있다.
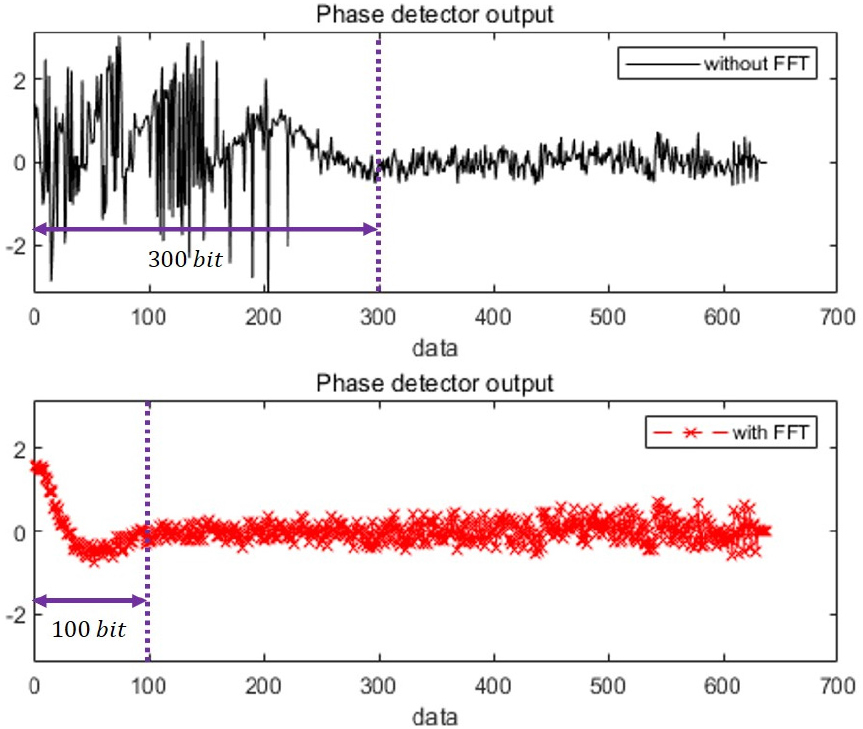
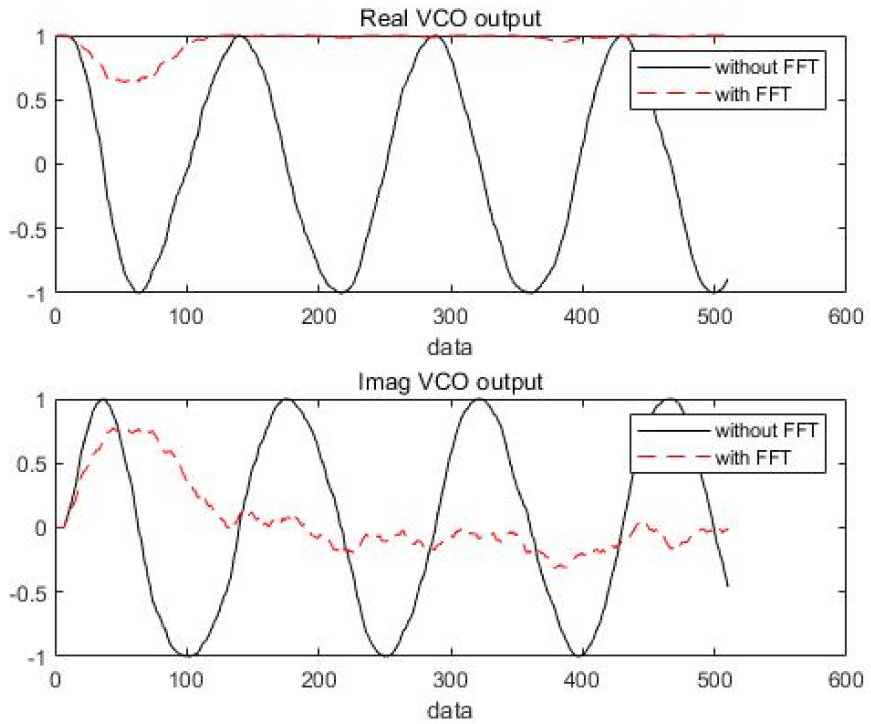
Fig. 16은 VCO의 출력이다. 도플러 주파수 보상이 이루어지지 않았을 경우는 정현파 형태로 나타난다. 하지만, 도플러 주파수를 보상한 후에는 정현파가 아닌 위상 변화의 형태로 나타난다. FFT에 의해 검출된 도플러 주파수는 1.96 Hz이다.
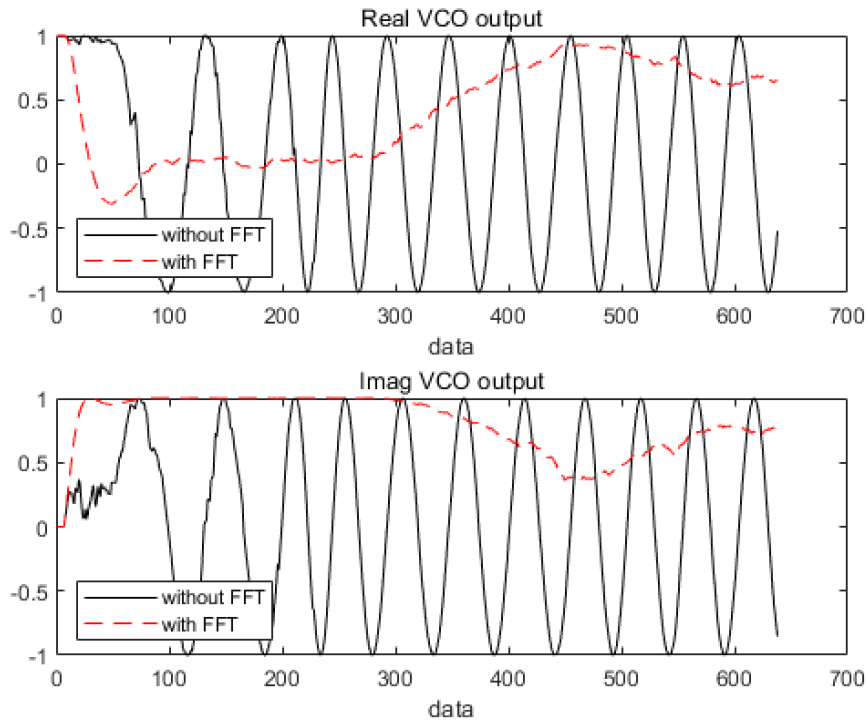
Fig. 17은 프리엠블 구간의 비트오류 패턴결과이다. 본 논문에서는 등화기와 위상고정루프의 수렴상태가 비트오류에 주는 영향을 확인하기 위해서 프리엠블 구간에서의 비트오류 패턴을 이용하였다. “1”은 송수신기간 비트 에러, “0”은 비트 일치를 가리킨다. 도플러 주파수를 보상하지 않은 경우는 약 230 bit이후에서는 비트오류가 발생하지 않는다. 이러한 결과로부터, 등화기와 위상고정루프가 수렴하여 안정상태에 완전히 진입하게 되면 비트오류가 발생하지 않는다는 것을 알 수 있다. 그러나, 도플러 주파수를 보상한 경우는 30 bit 이후부터 비트오류가 발생하지 않는다. 도플러 주파수를 보상한 경우는 등화기와 위상고정루프의 수렴속도가 상대적으로 빠르기 때문에 비트오류가 빨리 사라진다.
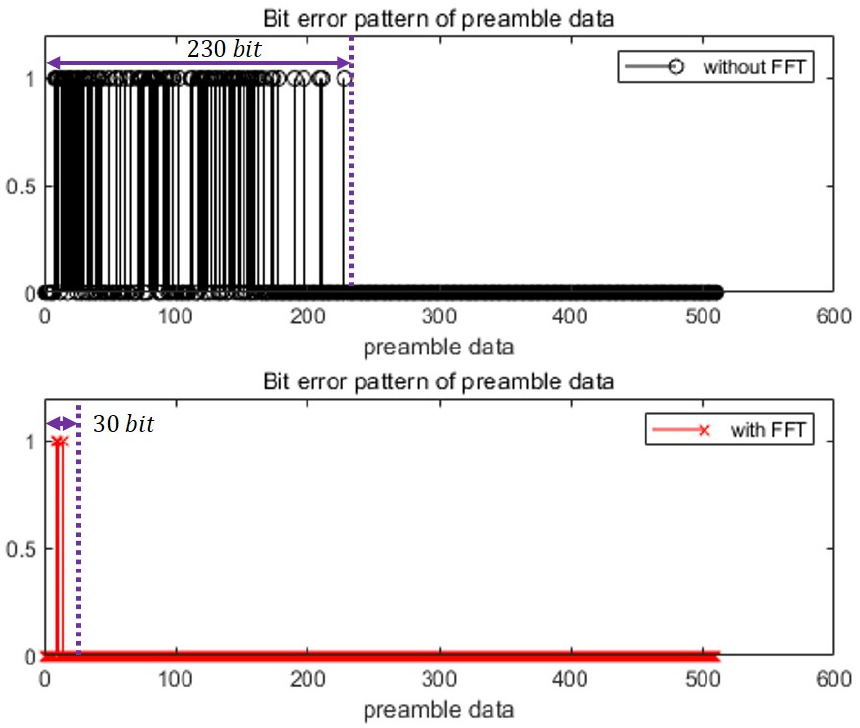
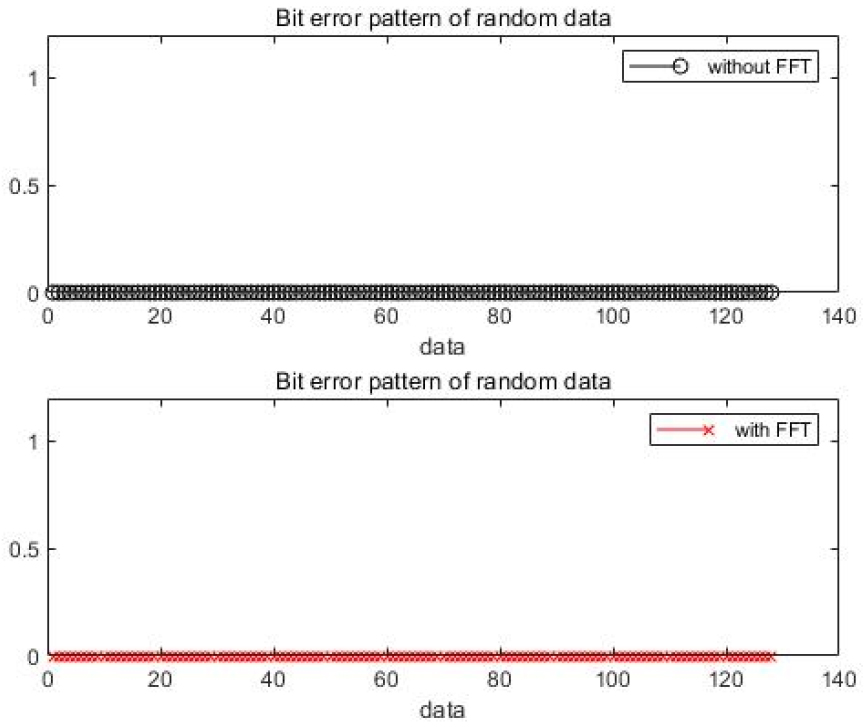
Fig. 18은 랜덤 데이터 구간에서의 비트오류 패턴 결과이다. 프리엠블 구간 이내에서 등화기와 위상고정루프가 이미 수렴하여 정상상태에 있기 때문에 랜덤 데이터의 비트 에러는 발생하지 않는다.
IV. 결 론
본 논문에서는 수중 음향통신에서 등화기와 위상고정루프의 성능을 호수 실험 및 해상실험을 통해 확인하였다. 수신신호에 도플러 주파수가 존재한다면, 등화기의 동작만으로는 데이터복구가 어렵다. 그렇기 때문에 도플러 주파수를 보상하기 위해 위상고정루프가 반드시 필요하다. 등화기가 다중경로를 제거해줌과 동시에 위상고정루프는 도플러 주파수를 보상해주기 때문에 서로 보완하면서 안정적인 동작을 수행한다. 또한, 등화기와 위상고정루프의 수렴속도는 FFT를 통해 도플러 주파수를 보상하면 빨라진다. 그러나, 도플러 주파수를 보상하지 않은 경우도 수렴속도만 느려질 뿐 프리엠블 구간 이내에서 수렴하고, 랜덤 데이터의 비트오류는 발생하지 않는다. 향후, 본 논문을 보다 향상시키기 위해서 랜덤데이터 길이를 보다 길게 하여 등화기와 위상고정루프가 정상상태에서 벗어나지 않는지를 확인하고자 한다. 그리고, 도플러 주파수를 보상하는 알고리즘으로 위상고정루프와 다양한 다른 알고리즘과의 성능을 비교하고자 한다.
