

I. 서 론
II. 능동소나 시스템의 수신신호 모의
2.1 시간영역 수신신호 모의 알고리즘
2.2 음파의 다중경로를 고려한 표적 반향신호 모의
2.3 잔향음 신호 모델링
2.4 주변소음 신호 모델링
III. 모의 해양환경에서 표적탐지 성능 분석
3.1 모의 해양환경에서 시뮬레이션 입력 변수
3.2 모의 해양환경에서 송신신호에 따른 표적탐지 성능 분석
IV. 결론 및 향후 연구 계획
 I. 서 론
I. 서 론
능동소나란 표적을 탐지하기 위해 송신신호를 송출하고 표적에서 반향되는 신호를 수신하여 분석하는 방법을 사용하는 소나시스템이다. 이때 표적 탐지부로 수신되는 음향 신호는 각종 해양소음과 표적의 형태, 자세각에 따른 반향 신호가 다중경로를 통해 전파된 후 잔향음 신호와 함께 수신된다.
이러한 수중환경에서 능동소나 시스템의 음향 탐지성능을 평가하기 위해서는 해상이나 수중에 존재하는 표적의 반향 신호를 수신하여 그에 따른 표적 탐지/식별 성능을 분석해야 하지만 수중환경에서 표적탐지부의 성능을 평가하기에는 그 기회가 매우 제한적이고 제품 개발 후 성능 평가까지 오랜 시간과 고비용이 요구된다. 따라서 M&S(Modeling and Simulation) 기법을 이용하여 능동소나 시스템 개발 및 성능을 검증함으로써 개발 기간 단축 및 개발 비용을 절약하는 방안이 대안으로 제시되고 있다.
따라서 국내외에서도 능동 표적 반향신호를 합성하는 연구가 진행되어 왔다.[1-7] 이 등[1-2]이 2차원 하이라이트 분포에 따른 표적 반향신호 합성에 관한 연구를 수행하였고, 김 등[3]이 1차원 등간격 하이라이트를 배치하여 표적 반향신호를 합성하고 시간영역에서 특징인자를 추출하는 연구를 수행하였다. 또한 김 등[4]이 음원과 표적의 3차원 운동에 따른 표적 반향신호 합성 알고리즘을 개발하고, 이를 실시간 처리하기 위한 기법을 적용하였으며, 신 등[5-6]은 3차원 외부형상을 고려하여 표적 반향신호를 합성하고 이를 실험적으로 검증하였다. 국외의 경우 능동소나 시뮬레이터 연구는 상당한 발전이 이루어졌고 실제적으로 소나의 성능을 평가하기 위해 적용하고 있지만 시뮬레이터 사용 및 연구 내용의 제한성이 존재한다.[7]
이와 같이 표적 반향신호를 합성하는 방법들이 연구되고 있지만, 대부분이 하이라이트 배치에 따른 표적 합성 알고리즘에 큰 비중을 두고 직접파에 의한 영향만을 고려하고 있다. 그러나 수중에서 능동소나 시스템의 음향 탐지성능을 평가하기 위해서는 시공간적으로 변동하는 해양환경에 따른 복합적인 다중경로 음파전달 특성(음파의 굴절, 반사), 경계면 산란에 따른 잔향음, 주변소음 특성 그리고 표적 반향 특성들을 반영한 합성신호 모의 연구가 필요하다. 따라서 본 논문에서는 능동소나 수신신호 모의시 거리종속 해양환경에서 신속하게 실제와 유사한 결과를 모사하기 위한 시뮬레이터를 제안한다.
본 논문의 1장은 능동소나 시스템의 음향 탐지성능을 평가하기 위해 3차원 외부 형상을 가지는 표적에서 음파의 다중경로를 고려한 대표반향점 배치 연구를 수행하였으며, 음파의 직접경로와 다중경로에 따른 표적 반향신호의 특성 차이를 비교하였다. 또한 가상의 해양환경 시나리오를 고려하여 능동소나 시스템에서 운용되는 여러 종류의 음원 신호들이 경계면에서 산란 및 표적에서 반향되어 되돌아온 신호의 특성을 비교함으로써 표적탐지 성능을 분석하였다. 2장은 능동소나 시스템에 수신되는 표적 반향신호, 주변 소음신호 그리고 잔향음 신호모의 알고리즘에 대하여 설명하였다. 3장에서는 모의 해양환경에서 개발된 모델을 이용하여 송신신호(CW, LFM) 및 음파의 직접경로 및 다중경로에 따른 수중음원의 수신 신호를 모의하였고 표적 신호 검출 방법에 따른 탐지성능을 비교하였다.
II. 능동소나 시스템의 수신신호 모의
2.1 시간영역 수신신호 모의 알고리즘
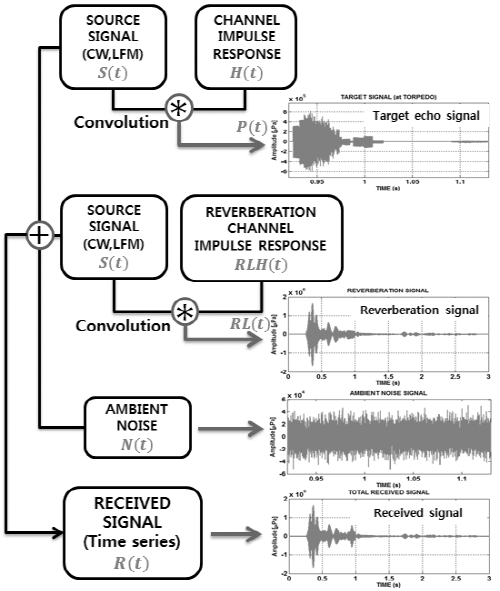
음향 도파관내에서 시간영역 신호를 모델링하는 방법은 두 가지로 나눌 수 있다. 첫 번째는 주파수영역에서 모의환경에 대한 공간전달 함수들을 계산하고 해양에 존재하는 음원들에 대한 특성을 반영하여 역푸리에 변환을 수행함으로써 시간영역 신호를 모의하는 방법이다.[8] 두 번째는 시간 영역에서 채널 임펄스 응답을 계산하고 음원신호를 합성함으로써 시간영역 신호를 모델링 하는 방법이다. 단일 주파수 신호일 경우 해양의 공간적인 영향을 단시간에 고려하기 위해서는 주파수 영역에서 모의하는 방법을 선호하기도 하지만, 능동소나 시스템의 음원 신호는 유한 길이의 주파수 대역폭을 가지기 때문에 주파수 영역에서 신호 모의 시 주파수 대역에 해당하는 각각의 공간전달 함수를 계산해야 한다. 따라서 신속한 표적 반향 신호모의가 요구되는 시뮬레이터에서는 어려움이 있으므로 본 논문에서는 음선이론을 이용하여 계산된 경계면 및 체적에 의한 반사, 산란이 포함된 시간영역 임펄스 응답에 음원 신호를 합성하여 시간 영역의 신호를 모의 하였다. Fig. 1은 표적 반향신호  , 잔향음 신호
, 잔향음 신호  및 주변소음 신호
및 주변소음 신호  를 합하여 수신신호
를 합하여 수신신호  를 모의하는 알고리즘 구성도이다. 본 시뮬레이터에 삽입되어 있는 표적 반향신호 및 잔향음 신호 모의 알고리즘 내 음파전달 모듈은 거리종속 환경에 적용 가능한 음선 기반의 음전달 모델인 BELLHOP 알고리즘을 적용하였다.
를 모의하는 알고리즘 구성도이다. 본 시뮬레이터에 삽입되어 있는 표적 반향신호 및 잔향음 신호 모의 알고리즘 내 음파전달 모듈은 거리종속 환경에 적용 가능한 음선 기반의 음전달 모델인 BELLHOP 알고리즘을 적용하였다.
2.2 음파의 다중경로를 고려한 표적 반향신호 모의
표적 반향신호 모의 방법은 다음과 같다. 먼저 수중음원과 표적간의 고유음선을 계산하여 대표 다중경로 조합을 계산한다. 그런 다음 대표 다중경로의 표적 입사각에 따라 3차원 형상을 가지는 표적 외부에 대표반향점을 신호의 불연속이 발생하지 않도록 배치시킨다. 그리고 표적의 입사각, 형태 그리고 자세각에 따라 달라지는 표적강도를 계산한다. 마지막으로 고유음선 정보(각 대표반향점에서의 시간지연, 위상 그리고 전달손실), 표적강도 그리고 빔 패턴을 이용하여 시간영역 임펄스 응답을 계산한 후 음원 신호와 합성 함으로써 최종적으로 표적 반향신호를 모의한다.
2.2.1 대표 고유음선 경로 선별 알고리즘
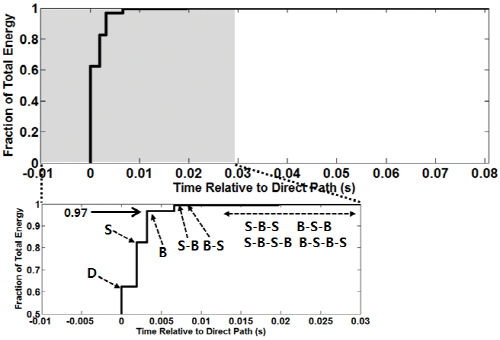
수중음원에서 송출된 음파는 해양환경을 통해 다중경로(직접 경로, 해수면 경로, 해저면 경로 등)로 전파되며, 경계면(해수면, 해저면)으로부터 반사, 투과, 산란 등의 음파 간섭의 영향을 받는 고유음선은 경계면에 반사될 때마다 에너지 손실이 발생한다. 이러한 다중경로들을 모두 고려하여 표적 반향신호를 모의 하는 것이 정확성을 높이는 방법이지만 연산 시간의 증가로 시뮬레이터의 성능을 저하 시키는 직접적인 요인이 된다. 따라서 정확성과 연산 시간을 모두 고려할 수 있도록 세립질 특성이 우세한 동, 남해 환경을 가정하에 다중경로를 단순화하는 작업이 이루어져야 한다. 다중경로 단순화 작업의 신뢰성을 확보하기 위해 가상의 수중환경(음속 1500 m/s, 해저 퇴적물 평균 입도 6.0 ϕ(sandy mud)에서 음파의 경로수 증가에 따른 에너지 누적 분포 모델링을 수행하였다. 음원 수심 20 m, 주파수 25 kHz, 음원 준위 220 dB, 수신기 수평거리 1 km, 수신기 수심 70 m에서 수행된 에너지 누적 분포 결과는 Fig. 2와 같다. 다중경로를 거쳐 수신기에 수신된 전체 음파 에너지는 100 %로, 이중 직접 경로, 해수면 경로, 해저면 경로의 에너지 합이 약 97 %를 가지는 것으로 나타났다.
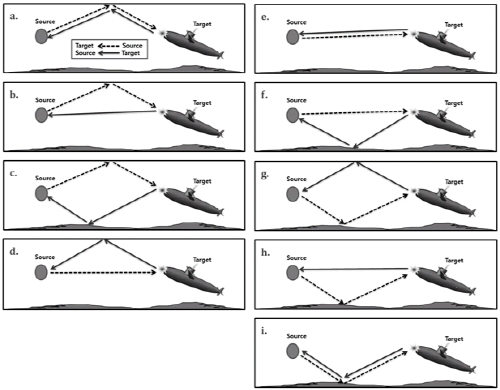
따라서 본 논문에서는1회 이하의 경계면 반사를 가지는 고유음선만을 선별하여 표적 반향 경로를 계산하였다. Fig. 3은 수중음원에서 표적까지 전파된 고유음선이 되돌아오는 총 9가지 경로를 보여준다. 이 중 b와 d, c와 g, f와 h의 경로는 고유음선이 동일한 시간에 수신되므로 동일 경로로 설정하여 둘 중 하나의 경로만 선택한 후 수신 음압을 두 배로 증폭하였다. 따라서 서로 다른 시간으로 되돌아올 수 있는 왕복 경로의 수를 고려하면 총 6가지로 a, e, i 경로와 2 배의 음압을 가지는 전달 경로 b, c, f를 선정하여 표적 반향신호 모의에 사용하였다.
2.2.2 대표반향점 위치 설정
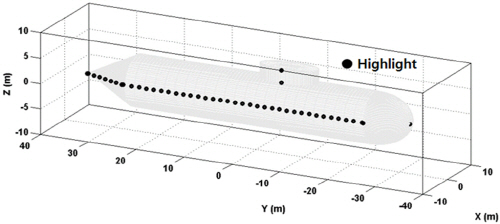
수중음원으로부터 송출된 음파는 다중경로를 통해 표적까지 전파되며 각 경로마다 표적에 입사되는 음파의 입사각이 다르기 때문에 대표반향점의 위치 역시 다르게 배치된다. 만일 표적을 단일 점 표적으로 가정한다면 다중경로를 통해 전파된 음파는 한점에 입사하게 되며, 이때 표적 반향신호는 표적의 특성(형상, 자세각 등) 및 입사 경로에 따른 신호 간섭 현상을 포함하지 못한다. 따라서 대표반향점 배치는 음원에서 송출된 음파가 2차원 환경(x축, z축)의 해양매질을 통해 전파되어 표적외부에 입사되는 위치를 고려하여 설정하였고 이를 y축 방향으로 확장하였다. 본 논문에서는 간단한 형태의 잠수함 모형을 표적 형상으로 가정하였고 다중경로의 표적입사각에 따른 대표반향점 위치를 Fig. 4에 나타내었다. 또한 3차원 형상의 표적으로부터 반향되어 수신기에 수신된 신호는 수중 음원에서 송출한 신호와는 다른 특성(신호의 크기 변동 및 신장)을 가지게 된다. 따라서 이와 같은 특성을 모의하기 위해서 표적 외부에 대표반향점을 신호간의 간섭이 존재하도록 배치하여 수신 신호의 불연속성이 나타나지 않도록 하였다. 일반적으로 모든 신호에서 신호간섭을 표현하기 위한 최소 대표반향점 간격을 계산하는 식은 다음과 같다.[1]
 .
.여기서  는 대표반향점 간의 간격,
는 대표반향점 간의 간격,  는 음속,
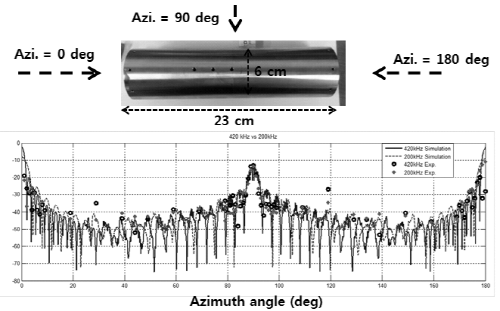
는 음속,  는 펄스 길이이다. 이때 대표반향점의 간격에 따라 합성된 반향신호가 달라지므로 실험을 바탕으로 획득한 신호와 모델링 결과와 비교 검증함으로써 대표반향점의 간격을 결정하는 것이 중요하다. 따라서 강성체 재질인 축소 표적(실린더)을 이용하여 반향신호를 측정하였고, 표적강도를 산출함으로써 모델링 결과와 비교 하였다.[9] Fig. 5는 주파수 200, 420 kHz, 펄스 길이 0.5 ms, 지향 센서를 이용하여 음파의 입사각별 표적강도 실험 결과와 신호 간의 간섭을 높이기 위해 대표 반향점 간격을
는 펄스 길이이다. 이때 대표반향점의 간격에 따라 합성된 반향신호가 달라지므로 실험을 바탕으로 획득한 신호와 모델링 결과와 비교 검증함으로써 대표반향점의 간격을 결정하는 것이 중요하다. 따라서 강성체 재질인 축소 표적(실린더)을 이용하여 반향신호를 측정하였고, 표적강도를 산출함으로써 모델링 결과와 비교 하였다.[9] Fig. 5는 주파수 200, 420 kHz, 펄스 길이 0.5 ms, 지향 센서를 이용하여 음파의 입사각별 표적강도 실험 결과와 신호 간의 간섭을 높이기 위해 대표 반향점 간격을  /16를 고려하여 모델링한 비교 결과이다. 음파의 입사각별 표적강도 실험과 모델링 비교 결과 유사한 포락선 형태와 값이 나타나기 때문에 대표반향점 간의 간격은
/16를 고려하여 모델링한 비교 결과이다. 음파의 입사각별 표적강도 실험과 모델링 비교 결과 유사한 포락선 형태와 값이 나타나기 때문에 대표반향점 간의 간격은  /16을 만족한다고 할 수 있다.
/16을 만족한다고 할 수 있다.
|
Fig. 5. Measurement and modeling target strength for wave incident angle.[9] |
|
Fig. 6. Highlight’s position calculation reflecting 3- dimensional target shape. |
능동소나 송신 신호의 파장과 표적의 크기와의 관계에 따라 음향산란 영역이 구성된다. 본 연구의 관심 주파수는 고주파수 대역으로 기하 광학 영역에 해당되며, 거울면 반사 현상이 지배적인 영역이다. 만일 양상태 개념으로 수신기가 음영구역에 위치할 경우 회절에 의한 효과가 존재하게 된다. 몇몇 국내연구에서는 회절에 의한 반향신호까지 고려하는 표적 대표반향점 모델을 제시한 바 있지만,[14-15] 회절에 의한 반향 신호는 최초 접촉면에서의 반향 신호에 비해 매우 작고,[5,10] 본 논문에 제시하는 모델은 단상태 능동소나이므로 회절에 대한 효과는 무시할 수 있다고 가정하였다. 따라서 본 논문에서는 표적의 최초 접촉면, 즉 거울면 반사가 표적 반향신호에 대부분의 에너지를 구성한다는 가정하에 대표반향점을 설정하여 반향 신호를 계산하였다. 음파가 3차원 형상을 가지는 표적의 측면으로 입사 될 경우 다음 Fig. 6과 같이 대표반향점이 설정 된다.
2.2.3 표적 좌표계 변환
3차원 형상함수로 구성된 전체 표적은 자세각( )에 따라 불연속적인 대표반향점의 위치가 달라지게 된다. 따라서 좌표계 회전에 따른 표적의 형상이 변하지 않도록 변환 방정식을 고려해야 한다.[11] 본 논문에서는 Euler 회전법을 사용하여 좌표변환을 수행하였다. 전체 좌표계를 구성하는 축(X, Y, Z)에 대한 반시계 방향의 회전각을 (
)에 따라 불연속적인 대표반향점의 위치가 달라지게 된다. 따라서 좌표계 회전에 따른 표적의 형상이 변하지 않도록 변환 방정식을 고려해야 한다.[11] 본 논문에서는 Euler 회전법을 사용하여 좌표변환을 수행하였다. 전체 좌표계를 구성하는 축(X, Y, Z)에 대한 반시계 방향의 회전각을 ( )라 하고 축 회전 순서를
)라 하고 축 회전 순서를  순으로 한다면 변환된 표적의 좌표(
순으로 한다면 변환된 표적의 좌표( )는 다음 식(2)를 통하여 계산 할 수 있다.
)는 다음 식(2)를 통하여 계산 할 수 있다.
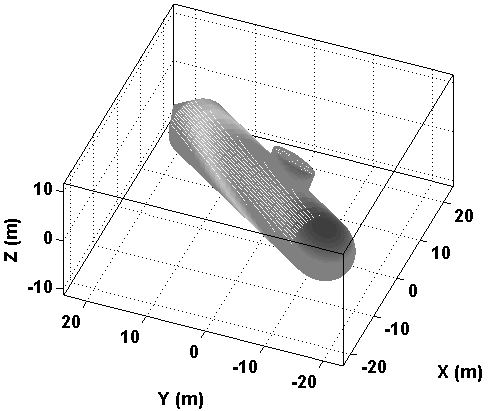
만약 표적 자세각이  (45°, 15°, 30°)라면 3차원 형상함수를 가지는 표적의 전체 좌표는 Euler 회전법을 사용하여 Fig. 7과 같은 좌표변환을 가진다.
(45°, 15°, 30°)라면 3차원 형상함수를 가지는 표적의 전체 좌표는 Euler 회전법을 사용하여 Fig. 7과 같은 좌표변환을 가진다.
2.2.4 표적 강도 계산
표적강도는 능동소나 시스템에서 표적탐지여부를 결정하는 중요한 변수로써 표적의 형태, 자세각 그리고 재질 등에 의해 결정된다. 기존의 표적강도 계산 방법으로는 표적 경계에서의 조건을 이용하여 복잡한 표적에서 음파의 후방산란 강도를 모의하는 수치 해석적 방법[12-16]과 해석식을 알고 있는 단순한 형태의 표적강도를 합성하는 방법이 있다.[1-6] 수치해석 기법은 복잡한 형상을 가지는 표적의 산란해석에 적합하다는 장점을 가지고 있다. 하지만 수치해석을 이용하는 Kirchhoff 근사방법[12-15]의 경우 수치적으로 근사 시키기 때문에 표적의 표면을 적은 요소망(Mesh)으로 분할하게 되면 수치 계산 오차를 야기하고 많은 요소망으로 분할할 경우 신속한 시뮬레이션에 무리가 따른다. 또한 BEM(Boundary Element Method)방법[16]은 표적의 형태가 복잡한 경우 경계조건을 적용하기 어렵고 조건들을 단순화 시킨다고 하더라도 계산시간이 많아서 Kirchhoff 근사방법과 마찬가지로 신속한 시뮬레이션이 어렵다. 따라서 본 논문에서는 표적의 표면이 강성체이고 내부 반사는 없다는 가정과 3차원의 복잡한 형상을 가지는 표적은 다양한 독립된 형상의 합으로 표현될 수 있다는 가정하에 표적 반향계수를 계산하였다. 만일 직접파만을 고려한다면 음파 입사각만을 이용하여 표적 반향계수를 계산할 수 있지만, 입사파와 다른 경로로 음파가 산란되는 경우 표적 반향계수를 도출하는 방법이 필요하다. 본 연구에서 표적 반향계수 계산방법은 음파의 입사각과 산란각의 합에 이분선을 취하여 단상태 표적 반향계수를 계산하는 양상태 정리(Bistatic theorem)를 이용하였다.[10] 이 알고리즘은 입사각과 산란각의 차이가 커질 수록 실제 현상과는 다른 결과가 유도 될 수 있는 단점이 있으나, 본 연구에서 고려하는 천해 단상태 능동소나에서 송출된 음파의 표적 입사각 및 산란각의 차이는 작으므로 이에 따른 오차는 무시 가능하다고 가정하였다.
음파의 입사각 및 대표반향점에 따른 표적 반향계수는 표적 반향신호 계산시 적용되었다. 독립된 형상(표적의 선수부( )는 타원체, 몸통(
)는 타원체, 몸통( )은 실린더, 후미(
)은 실린더, 후미( )는 원뿔 그리고 전망탑(
)는 원뿔 그리고 전망탑( )은 타원 실린더 형상)에 대한 표적 반향계수는 해석식이 존재하며 식(3) ~ (6)과 같다.[18]
)은 타원 실린더 형상)에 대한 표적 반향계수는 해석식이 존재하며 식(3) ~ (6)과 같다.[18]


여기서  와
와  는 각 형상들의 반경과 길이를 나타내는데 몸통 형상의 경우 대표반향점의 개수에 따라 독립적인 형상으로 구분된다. 따라서 형상의 길이 c에 대표반향점의 개수만큼을 분할하여 계산하였다. 전망탑의 경우
는 각 형상들의 반경과 길이를 나타내는데 몸통 형상의 경우 대표반향점의 개수에 따라 독립적인 형상으로 구분된다. 따라서 형상의 길이 c에 대표반향점의 개수만큼을 분할하여 계산하였다. 전망탑의 경우  는 타원실린더의 장축 반경,
는 타원실린더의 장축 반경,  는 단축 반경이다.
는 단축 반경이다.  와
와  는 수직 및 수평 양상태 방위각,
는 수직 및 수평 양상태 방위각,  는 입사파의 파장,
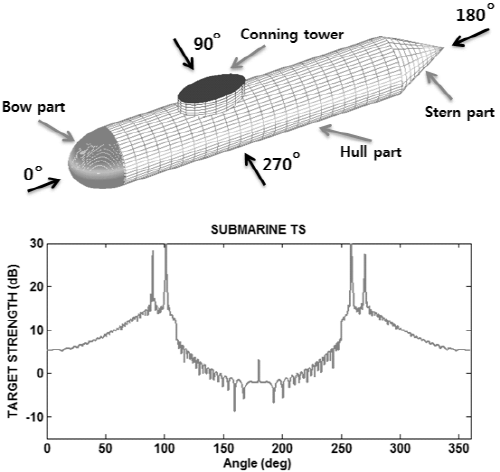
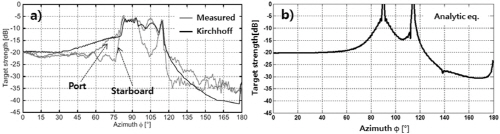
는 입사파의 파장,  는 원뿔 꼭지점과 모선이 이루는 각의 반이다. 따라서 위 식을 이용하여 음파의 입사각 및 대표반향점에 따른 각각의 표적 반향계수를 계산하고 10log를 수행하여 합하면 Fig. 8과 같이 전체 형상에 대한 표적강도를 계산 할 수 있다. 전체 표적강도에서 90°, 100°, 260°, 270°에서 높은 표적강도를 보이는 이유는 잠수함 형상의 몸통 및 후미에 수직으로 음파가 입사하기 때문에 수신기 방향으로 되돌아오는 음향 에너지가 커지기 때문이다. 또한 Fig. 9에서는 본 논문에서 제시한 표적강도 계산 방법의 신뢰성을 확보하기 위해 기존 연구결과와 비교하여 효용성을 검증하였다. Fig. 9(a)는 단순 형상으로 이루어진 축소 잠수함 표적에 대한 표적강도 측정결과(우현, 좌현)와 Kirchhoff 근사방법 이용하여 모델링한 표적강도 비교를 나타낸다.[17] Fig. 9(b)는 본 논문에서 제시하는 단순 형상함수의 해석식을 조합하여 계산된 방위별 표적강도이다. 실험 결과 및 Kirchhoff 근사방법과 유사한 경향을 가지는 것을 확인 할 수 있다. 하지만 해석식의 경우 90°, 117°에서 실험 결과와는 다른 순간 최고치를 가지는데, 이는 실험과는 달리 음파의 입사각이 표면에 수직을 이루기 때문에 나타나는 오차이다.
는 원뿔 꼭지점과 모선이 이루는 각의 반이다. 따라서 위 식을 이용하여 음파의 입사각 및 대표반향점에 따른 각각의 표적 반향계수를 계산하고 10log를 수행하여 합하면 Fig. 8과 같이 전체 형상에 대한 표적강도를 계산 할 수 있다. 전체 표적강도에서 90°, 100°, 260°, 270°에서 높은 표적강도를 보이는 이유는 잠수함 형상의 몸통 및 후미에 수직으로 음파가 입사하기 때문에 수신기 방향으로 되돌아오는 음향 에너지가 커지기 때문이다. 또한 Fig. 9에서는 본 논문에서 제시한 표적강도 계산 방법의 신뢰성을 확보하기 위해 기존 연구결과와 비교하여 효용성을 검증하였다. Fig. 9(a)는 단순 형상으로 이루어진 축소 잠수함 표적에 대한 표적강도 측정결과(우현, 좌현)와 Kirchhoff 근사방법 이용하여 모델링한 표적강도 비교를 나타낸다.[17] Fig. 9(b)는 본 논문에서 제시하는 단순 형상함수의 해석식을 조합하여 계산된 방위별 표적강도이다. 실험 결과 및 Kirchhoff 근사방법과 유사한 경향을 가지는 것을 확인 할 수 있다. 하지만 해석식의 경우 90°, 117°에서 실험 결과와는 다른 순간 최고치를 가지는데, 이는 실험과는 달리 음파의 입사각이 표면에 수직을 이루기 때문에 나타나는 오차이다.
|
Fig. 9. Comparison of target strength methods; a) Kirchhoff approximation method and measured data, b) analytic equation method. |
2.2.5 수중음원의 빔 패턴 계산
수중음원의 빔 패턴은 잔향음 및 소음의 영향을 줄여 표적의 탐지 및 식별 성능을 높이기 위해 사용된다. 일반적으로 하나의 음원만으로는 원하는 빔 패턴을 얻기 어렵기 때문에 식(7)과 같이 동일한 음원을 배열하고 각 음원의 가중치 함수를 적용함으로써 원하는 빔 특성을 결정한다. 본 논문에서 빔 패턴 구성은 음원을 8×8 사각평면 배열로 하였고 음원의 가중치는 수직 및 수평 방향각이 0°일 때 빔 패턴 준위 0 dB를 기준으로 하여 방향각이 존재할 경우 해닝 윈도우를 이용하여 빔 패턴 준위 값이 감소하도록 하였다.[19]

여기서  은 종 방향각과 횡 방향각이 고려된 빔 패턴,
은 종 방향각과 횡 방향각이 고려된 빔 패턴,  은 종 방향의 음원 개수(8개),
은 종 방향의 음원 개수(8개),  은 횡 방향의 음원 개수,
은 횡 방향의 음원 개수,  는 가중치 함수,
는 가중치 함수,  는 수중에서의 표준 음속으로 1500 m/s을 적용하였으며
는 수중에서의 표준 음속으로 1500 m/s을 적용하였으며  는 음원 간격으로
는 음원 간격으로  /2를 만족해야 한다.
/2를 만족해야 한다.
2.2.6 표적 반향신호 모의
수중 표적이 원거리에 존재하여 음원 신호의 주파수, 길이, 표적 형상 및 구조적인 특성 등에 영향이 적다고 가정하면 표적을 단일 대표반향점이라고 볼 수 있다. 수중 음원으로부터 송출된 음파가 단일 대표반향점에서 반향되어 송신경로와 동일하게 수신기로 되돌아올 때의 임펄스 응답 을 계산하면 다음 식(8)과 같이 간단히 계산된다.
을 계산하면 다음 식(8)과 같이 간단히 계산된다.
 .
.여기서  와
와  은 송수신 빔 패턴,
은 송수신 빔 패턴,  과
과  은 음원에서 표적, 표적에서 수신기까지 고유음선 음압으로 직접경로만 가정하였으므로 동일한 값을 가진다.
은 음원에서 표적, 표적에서 수신기까지 고유음선 음압으로 직접경로만 가정하였으므로 동일한 값을 가진다.  은 단일 대표반향점에서의 표적 반향계수이고,
은 단일 대표반향점에서의 표적 반향계수이고,  은 음원과 표적, 표적과 수신기 사이의 위상을 나타낸다. 만약 반대로 수중 표적이 근거리에 존재하여 음원 신호의 주파수, 길이, 표적 형상 및 구조적인 특성 등에 영향이 크다면 표적의 다중 대표반향점을 가정하게 되고, 각각의 대표반향점에서 나타나는 입사파에 대한 반향 계수 및 시간지연 등을 고려하여 모의해야 한다. 따라서 다중 대표반향점을 고려할 경우 임펄스 응답은 다음 식(9)와 같다.
은 음원과 표적, 표적과 수신기 사이의 위상을 나타낸다. 만약 반대로 수중 표적이 근거리에 존재하여 음원 신호의 주파수, 길이, 표적 형상 및 구조적인 특성 등에 영향이 크다면 표적의 다중 대표반향점을 가정하게 되고, 각각의 대표반향점에서 나타나는 입사파에 대한 반향 계수 및 시간지연 등을 고려하여 모의해야 한다. 따라서 다중 대표반향점을 고려할 경우 임펄스 응답은 다음 식(9)와 같다.

여기서  은 전체 대표반향점 개수,
은 전체 대표반향점 개수,  은 q번째 대표반향점에서의 표적 반향계수,
은 q번째 대표반향점에서의 표적 반향계수,  와
와  은 대표반향점 방향으로의 송수신 빔 패턴,
은 대표반향점 방향으로의 송수신 빔 패턴,  과
과  은 음원에서 대표반향점, 대표반향점에서 수신기까지 고유음선 음압,
은 음원에서 대표반향점, 대표반향점에서 수신기까지 고유음선 음압,  는 음원과 대표반향점, 대표반향점과 수신기 사이의 위상이다. 수중에서는 시공간적으로 변동하는 해양환경변화에 의해 음파의 굴절, 회절, 반사, 산란 등으로 인한 복합적인 음파전달 특성을 가지므로 수신 채널응답에 다중경로에 의한 음파전달 특성을 고려하여 계산해야 한다. 따라서 수중음원으로부터 송출된 음파가 각 대표반향점에서 반향되어 수신기로 되돌아올 때의 송수신 고유음선 음압, 위상, 시간지연, 표적 반향계수 그리고 송수신 빔 패턴을 이용하여 임펄스 응답은 다음 식(10)과 같이 나타낼 수 있다.
는 음원과 대표반향점, 대표반향점과 수신기 사이의 위상이다. 수중에서는 시공간적으로 변동하는 해양환경변화에 의해 음파의 굴절, 회절, 반사, 산란 등으로 인한 복합적인 음파전달 특성을 가지므로 수신 채널응답에 다중경로에 의한 음파전달 특성을 고려하여 계산해야 한다. 따라서 수중음원으로부터 송출된 음파가 각 대표반향점에서 반향되어 수신기로 되돌아올 때의 송수신 고유음선 음압, 위상, 시간지연, 표적 반향계수 그리고 송수신 빔 패턴을 이용하여 임펄스 응답은 다음 식(10)과 같이 나타낼 수 있다.

여기서  은 표적에 입사하는 고유음선 개수,
은 표적에 입사하는 고유음선 개수,  은 표적으로부터 되돌아오는 고유음선 개수,
은 표적으로부터 되돌아오는 고유음선 개수,  은 음원에서 대표반향점까지의 입사 고유음선 음압,
은 음원에서 대표반향점까지의 입사 고유음선 음압,  은 대표반향점에서 음원까지의 수신 고유음선 음압이다. 수신 임펄스 응답과 음원 신호
은 대표반향점에서 음원까지의 수신 고유음선 음압이다. 수신 임펄스 응답과 음원 신호  를 합성하여 표적 반향신호
를 합성하여 표적 반향신호 를 모의하였다.
를 모의하였다.
 .
.또한 이동하는 표적에서의 반향 신호는 수중 음원에서 송신한 신호와 다른 주파수 변이된 신호를 가지게 되며, 이는 수신 신호의 주파수 분석을 통해 표적 반향 신호를 구분하는 중요한 요인이 된다. 3차원 공간에서 이동하는 표적의 도플러 변이된 주파수는 식(12)와 같이 계산된다.
 .
.여기서  은 도플러 변이된 주파수,
은 도플러 변이된 주파수,  은 송신 신호 주파수,
은 송신 신호 주파수,  는 수층 평균 음속,
는 수층 평균 음속,  는 표적의 속도 벡터,
는 표적의 속도 벡터, 은 음원 위치에서 q번째 대표반향점을 향한 단위벡터,
은 음원 위치에서 q번째 대표반향점을 향한 단위벡터,  는 q번째 대표반향점에서 수신기를 향한 단위벡터를 나타낸다. 수중 음원으로부터 다중 경로로 전파된 음파는 표적에 각기 다른 입사각을 가진다. 따라서 음파의 경로에 따라 달라지는 도플러 변이된 주파수를 고려하여 반향 신호가 모의된다.[4]
는 q번째 대표반향점에서 수신기를 향한 단위벡터를 나타낸다. 수중 음원으로부터 다중 경로로 전파된 음파는 표적에 각기 다른 입사각을 가진다. 따라서 음파의 경로에 따라 달라지는 도플러 변이된 주파수를 고려하여 반향 신호가 모의된다.[4]
2.2.7 음파의 직접경로와 다중경로에 의한 표적 반향신호 비교
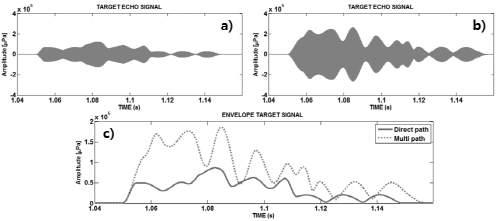
기존의 능동소나 탐지성능을 평가하기 위한 표적 반향신호모의 연구에서는 주로 해양의 음속이 고정인 단순한 환경에서 직접경로만을 고려하여 수행되었다. 이는 표적 인식 및 추적을 위한 신속한 시뮬레이션 결과를 도출할 수 있다는 장점을 가지는 반면, 해양환경에서의 음파전달 특성 및 다중경로에 따라 변하는 대표반향점을 반영하지 못하는 한계를 가지므로 실제 표적신호와 차이가 존재한다. 따라서 실제와 유사한 표적 반향신호를 모의하기 위해서는 직접경로와 다중경로에 따른 표적 반향신호에 미치는 영향을 분석해야 한다. Fig.10은 해역 수심 100 m, 음원 수심 20 m, 주파수 10 kHz, 음원 준위 220 dB, 신호 길이 0.04 s, 표적 수평거리 0.8 km, 표적 수심 50 m, 풍속 3 m/s, 해저 퇴적물 평균입도 3.0 ϕ, 송신각 범위 -30° ~ 30°, 잠수함 표적 자세각(35°, 5°, 0°) 그리고 수층 음속 1500 m/s을 가지는 모델링 환경에서 (a)는 직접경로에 의한 표적 반향신호, (b)는 다중경로에 의한 표적 반향신호 그리고 (c)는 두 신호에 envelope을 수행하여 크기를 비교하였다. 다중경로를 고려하여 계산된 표적신호는 직접경로만을 고려한 신호보다 표적 반향신호 길이가 증가하고 수신 신호간 간섭이 증가하는 것을 알 수 있다. 이는 음원에서 표적까지 그리고 표적에서 수신기까지의 음파전달 경로 조합이 Fig. 3과 같이 각각 다른 시간 지연과 위상을 가진 채 수신 되기 때문이다. 따라서 본 논문 3장에서는 직접경로와 다중경로에 의한 표적 반향신호가 형태의 차이뿐만 아니라 표적 탐지성능에서의 차이를 확인하기 위해 모의 해양환경에서 시뮬레이션을 수행하였다.
2.3 잔향음 신호 모델링
해상에서 능동소나를 이용하여 표적을 탐지할 경우 표적 반향신호 이외에 불규칙한 경계면과 체적 산란체로부터 산란되어 수신되는 잔향음 신호도 존재한다. 특히 천해에서는 심해에 비해 경계면의 영향이 크기 때문에 잔향음 제한 환경이 우세하게 되며 표적 탐지 예측에 제한 요소로 작용한다. 본 논문에서 잔향음 신호 모의 방법은 먼저 음선이론을 적용하여 음원에서 송신된 음선이 일정간격으로 나누어진 경계면(해수면 및 해저면)에서 산란되고 음원으로 되돌아오는 가능한 경로의 모든 고유음선 정보들(음파전달 손실, 전달 시간, 산란강도, 산란단면적 등)을 계산한다. 그런 다음 음파의 전달 시간과 신호의 길이에 따라 잔향음 준위에 영향을 미치는 산란면적의 변화율을 반영하여 이를 같은 시간 구간을 갖는 음압끼리 모은 후 음압강도의 합을 수행하였다. 일정간격으로 나누어진 경계면을 따라 적분을 수행하면 식(13)과 같이 시간에 따른 잔향음 임펄스 응답 을 계산할 수 있다.[20-23] 또한 잔향음 모델에 산란 신호의 통계적 특성을 적용하기 위해, 먼저 임의의 수를 생성하는 함수를 이용하여 정규 분포를 따르는 진폭의 산란 신호를 생성한다. 이렇게 생성된 산란 신호들은 임의의 크기를 가진 상호 독립적인 변수이고 만일 무수히 많은 신호가 수신된다면 중심 극한 정리에 의해 일정한 통계적 특성을 가진다.[24] 그리고 잔향음 모델을 통해 구해진 시간영역에서의 임펄스 응답에 생성된 산란 신호를 적용해서 최종적인 잔향음 시계열 신호를 모의하였으며, 잔향음 신호에 통계적 특성을 적용하여 임의적인 위상을 가지는 잔향음 신호를 모의하였다.
을 계산할 수 있다.[20-23] 또한 잔향음 모델에 산란 신호의 통계적 특성을 적용하기 위해, 먼저 임의의 수를 생성하는 함수를 이용하여 정규 분포를 따르는 진폭의 산란 신호를 생성한다. 이렇게 생성된 산란 신호들은 임의의 크기를 가진 상호 독립적인 변수이고 만일 무수히 많은 신호가 수신된다면 중심 극한 정리에 의해 일정한 통계적 특성을 가진다.[24] 그리고 잔향음 모델을 통해 구해진 시간영역에서의 임펄스 응답에 생성된 산란 신호를 적용해서 최종적인 잔향음 시계열 신호를 모의하였으며, 잔향음 신호에 통계적 특성을 적용하여 임의적인 위상을 가지는 잔향음 신호를 모의하였다.

 .
.여기서 i는 음원에서 경계면(해수면, 해저면)까지의 송신 경로로써  와
와  는 특정 산란 면적에 대한 송신 고유음선 음압 및 전달 시간이다. j는 경계면에서 음원까지의 수신 경로로써
는 특정 산란 면적에 대한 송신 고유음선 음압 및 전달 시간이다. j는 경계면에서 음원까지의 수신 경로로써  와
와  는 수신 고유음선 음압 및 전달 시간이다. 또한
는 수신 고유음선 음압 및 전달 시간이다. 또한  는 단위 면적에서의 산란 강도로 산란 면적에서 음파의 입사각과 산란각을 이용하여 계산되며,
는 단위 면적에서의 산란 강도로 산란 면적에서 음파의 입사각과 산란각을 이용하여 계산되며,  은 음파의 송수신 전달 시간(
은 음파의 송수신 전달 시간( ), 신호의 길이, 거리증분, 경계면 음속에 의해서 계산되는 산란면적의 시간 변화율이다.
), 신호의 길이, 거리증분, 경계면 음속에 의해서 계산되는 산란면적의 시간 변화율이다.  는 특정 산란 면적까지의 송신 위상,
는 특정 산란 면적까지의 송신 위상,  는 수신 위상이다.
는 수신 위상이다.  는 미소 경계요소,
는 미소 경계요소,  은 특정 산란면적에 입사하는 고유음선 개수,
은 특정 산란면적에 입사하는 고유음선 개수,  은 특정 산란면적으로부터 수신기로 되돌아오는 고유음선 개수이다. 잔향음 임펄스 응답
은 특정 산란면적으로부터 수신기로 되돌아오는 고유음선 개수이다. 잔향음 임펄스 응답 과 음원으로부터 송출된 신호
과 음원으로부터 송출된 신호 를 합성하여 잔향음 신호
를 합성하여 잔향음 신호  를 모의하였다.
를 모의하였다.
 .
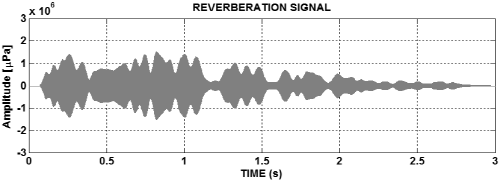
.본 시뮬레이터에 삽입된 잔향음 알고리즘에 대한 자세한 설명과 실측 신호와의 비교는 참고문헌 [23]에 소개되어 있다(본 논문에서 제시된 잔향음 알고리즘과의 차이점은 본 논문에서는 BELLHOP 음선추적 알고리즘을 적용하였으나, 참고문헌 [23]에서는 자체 개발한 음선이론 바탕의 음전달 모델이 사용되었음). Fig. 11은 Fig. 10과 동일한 환경에서 모의된 잔향음 신호를 보여 준다.
2.4 주변소음 신호 모델링
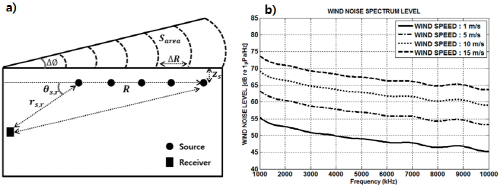
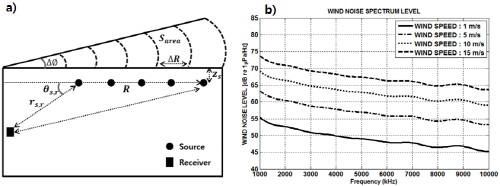
수중에서 지속적으로 존재하는 주변소음 신호는 바람에 의한 해수면 소음, 해양 난류에 의한 소음, 물 분자의 운동에 의한 열 소음, 지진에 의한 소음 등으로 구분되며 표적 신호를 탐지하는데 방해 요소로 작용한다. 이러한 주변소음들은 광대역 신호의 형태를 가지고 발생 기작에 따라 서로 다른 주파수 대역을 가진다. 일반적인 주변 소음에는 해수면의 운동으로 인한 압력 변화 등으로 발생하는 초저주파(1 ~ 10 Hz) 소음, 선박 추진기에 의하여 발생하는 저주파(10 Hz ~ 1 kHz) 소음, 바람에 따른 해수면 교란에 의하여 발생하는 중주파(1 ~ 50 kHz) 소음, 해수 분자의 열교란에 의하여 발생하는 초고주파(50 kHz 이상) 소음 등이 있다.[25-26] 특히 본 논문의 관심 주파수인 10 kHz 대역의 주요 소음원은 해상상태에 따른 해수면으로부터 야기되는 소음이 주된 소음원으로 음향 도파관 전파에 따른 전달손실을 고려한 주변소음 신호 모의가 요구된다. 바람에 의한 해수면 소음은 파고의 마찰음 및 공기방울의 충격음에 의하여 발생하므로 쌍극자 음원으로 설정할 수 있다.[9] 따라서 쌍극자 음원을 가정한 해수표면 영역에서 발생된 소음이 수신기에 수신될 때 소음 준위( )는 식(15)-(17)을 이용하여 모의할 수 있다.[27-28]
)는 식(15)-(17)을 이용하여 모의할 수 있다.[27-28]
|
|
Fig. 12. Wind noise modeling; a) wind noise calculation description, b) wind noise for wind speed in the frequency domain. |
 ,
, ,
, .
. 은 Wenz curve[25]를 이용하여 계산된 바람에 의한 소음준위로 해수표면에서의 소음준위로 전환하기 위해 -4.97 dB를 보상하였다.[27]
은 Wenz curve[25]를 이용하여 계산된 바람에 의한 소음준위로 해수표면에서의 소음준위로 전환하기 위해 -4.97 dB를 보상하였다.[27]  는 음원과 수신기간 수평 거리(
는 음원과 수신기간 수평 거리( )에서 해수면 영역을 등분한 각(
)에서 해수면 영역을 등분한 각( )을 고려한 해수면 소음이 발생하는 영역의 넓이,
)을 고려한 해수면 소음이 발생하는 영역의 넓이,  는 소음원의 수심,
는 소음원의 수심,  는 소음원과 수신기가 이루는 각,
는 소음원과 수신기가 이루는 각,  는 파수이다. Fig. 12(a)는 해수면의 소음준위를 계산하기 위한 모식도이고, Fig. 12(b)는 음원 수심 1 m, 수신기 수심 30 m, 음원과 수신기간 수평 거리 2000 m, 해수면 영역을 등분한 각 10°, 주파수 10 kHz에서 풍속(1, 5, 10, 15 m/s)에 따른 해수면 소음준위를 나타내었다. 음향도파관 효과가 고려된 해수면 소음준위를 Wenz curve 식에 적용하여 모의하고자 하는 주파수 영역에서의 주변소음 준위를 계산하였다.
는 파수이다. Fig. 12(a)는 해수면의 소음준위를 계산하기 위한 모식도이고, Fig. 12(b)는 음원 수심 1 m, 수신기 수심 30 m, 음원과 수신기간 수평 거리 2000 m, 해수면 영역을 등분한 각 10°, 주파수 10 kHz에서 풍속(1, 5, 10, 15 m/s)에 따른 해수면 소음준위를 나타내었다. 음향도파관 효과가 고려된 해수면 소음준위를 Wenz curve 식에 적용하여 모의하고자 하는 주파수 영역에서의 주변소음 준위를 계산하였다.
시간영역 소음 신호 모의 절차는 모의하고자 하는 주파수 영역에서의 주변 소음 특성을 가지는 창 함수와 백색 가우시안 소음을 생성하여 이를 주파수 영역에서 곱하고 역푸리에 변환을 수행하여 시간영역 소음 신호를 모의하였다.
III. 모의 해양환경에서 표적탐지 성능 분석
3.1 모의 해양환경에서 시뮬레이션 입력 변수
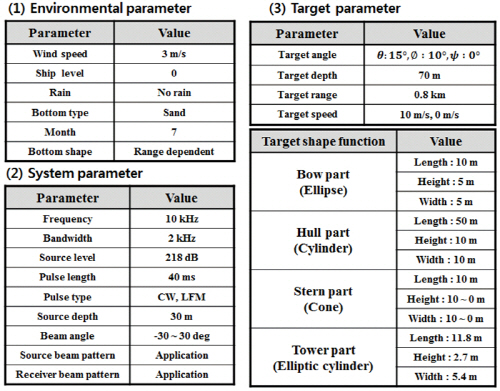
모의 해양환경에서 수중음원의 수신 신호(표적 반향신호, 잔향음 신호, 주변소음 신호)를 모의하기 위해 Table 1과 같이 시뮬레이션 입력 변수(환경 변수, 표적 변수, 시스템 변수)를 설정한 후 시뮬레이션을 수행하였다.
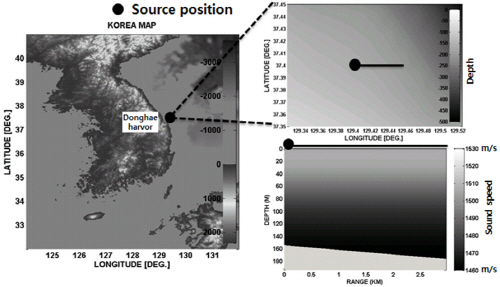
시뮬레이션 모의 해역은 여름철(7월) 동해안 연안으로 거리종속 해저 지형자료는 ETOPO1을 이용하여 추출하였다.[29] 또한 수온 및 염분 수치모델자료는 연간, 계절별의 시간적 해상도와 1° 간격을 갖는 공간 해상도를 갖는 자료 GDEM(Generalized Digital Environment Model)[30]을 이용하여 추출하였으며 Del Grosso equation[31]을 적용하여 수심에 따른 음속을 계산하였다. 모의 해역에서 거리종속 음속구조와 해저면 형태는 Fig. 13과 같다.
3.2 모의 해양환경에서 송신신호에 따른 표적탐지 성능 분석
능동소나 시스템에서 송신신호는 주로 CW(Continuous Wave) 및 FM(Frequency Modulation) 신호를 사용하고 각각의 표적 신호 분석 방법은 송신신호의 특성에 따라 다르게 적용된다. 일반적으로 시간별 주파수가 일정한 CW 신호는 주파수 분해능이 좋은 반면 시간적 분해 성능이 낮아 표적의 속도 분석에 사용된다. 또한 시간별 주파수가 변화하는 FM 신호는 반대로 상대적으로 주파수 분해능이 낮지만 상관성 분석에 따른 거리 분해능이 좋기 때문에 표적의 거리 분석에 주로 사용된다. 따라서 본 논문의 시뮬레이션에서는 CW와 LFM(Linear FM)신호를 사용하여 음파의 직접 경로 및 다중 경로에 따른 수중음원에서 수신되는 신호를 모의하였고 표적 신호 검출 성능 비교를 수행하였다.
3.2.1 CW (Continuous Wave) 송신신호의 표적 탐지성능 분석
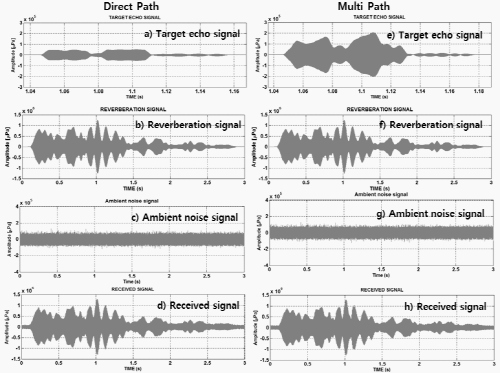
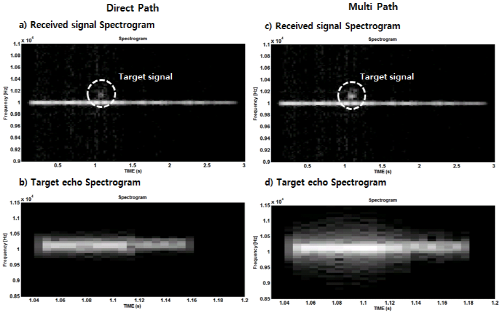
Fig. 14는 CW 송신신호를 사용하여 음파의 직접 경로와 다중 경로에 따른 수신 신호를 모의한 결과이다. (a)~(d)는 음파의 직접 경로만 고려했을 경우 표적 반향신호, 잔향음 신호, 주변소음 신호 그리고 합성 수신신호 결과, (e)~(h)는 음파의 다중 경로를 고려했을 경우 표적 반향신호, 잔향음 신호, 주변소음 신호 그리고 합성 수신신호 결과이다. Fig. 14(d)와 (h)의 합성 수신신호에서 두 경우 모두 표적 반향신호의 크기가 잔향음 신호의 크기 보다 작으므로 표적 반향신호의 존재 여부는 육안으로 판별하기 어렵다. 따라서 Fig. 15와 같이 표적의 속도 및 방향각 그리고 음파의 표적 입사각을 통해 계산되는 도플러 변이(Doppler shift)를 이용하여 표적 반향신호를 분석 해야 한다. Fig. 15의 (a)와 (c)는 직접 경로 및 다중경로를 고려했을 경우 합성 수신 신호의 스펙트로그램결과로 주파수 20.38 kHz에서 표적 반향신호의 주파수 변이가 나타나므로 잔향음 신호와 구별이 된다. Fig. 15의 (b)와 (d)의 표적 반향신호의 스펙트로그램 결과를 보면 다중 경로를 고려했을 경우 직접 경로만을 고려했을 경우 보다 상대적으로 광대역 주파수 특성을 가지는 것을 확인 할 수 있다. 이러한 원인은 음파 경로에 따라 달라지는 도플러 변이가 표적 반향 신호에 반영되었기 때문이다. 따라서 주파수 분해능으로 탐지 성능을 분석하는 연구에서 음파의 다중 경로에 따른 표적 반향 신호 특성은 탐지 성능에 영향을 미칠 수 있다.
표적이 이동하는 경우 주파수 분해능이 좋은 CW신호를 이용하여 표적 분석이 가능하지만 표적 속도가 작거나 없을 경우, 또는 표적의 방향이 음원이 바라보는 방향과 직각을 이룰 경우 주파수 변이가 작아지기 때문에 표적 반향신호 분석이 어려워진다.
3.2.2 LFM (Linear Frequency Modulation) 송신신호의 표적 탐지성능 분석
Fig. 16은 LFM 송신신호를 사용하여 음파의 직접 경로와 다중 경로에 따른 수신 신호를 모의한 결과로 (a)~(d)는 음파의 직접 경로만 고려했을 경우 표적 반향신호, 잔향음 신호, 주변소음 신호 그리고 합성 수신 신호 결과, (e)~(h)는 음파의 다중 경로를 고려했을 경우 표적 반향신호, 잔향음 신호, 주변소음 신호 그리고 합성 수신 신호 결과이다. Fig. 14의 경우와 마찬가지로 표적 반향신호의 크기가 잔향음 신호 보다 작기 때문에 육안으로 판별이 어렵다. 또한 LFM송신신호의 표적 반향신호는 주파수 분해능이 낮기 때문에 주파수 변이를 이용하는 표적 반향신호 분석 방법은 적용할 수 없다. 따라서 LFM 수신신호에서 표적 반향신호 분석은 합성 수신신호와 송신 신호간의 상관관계를 비교하여 판별할 수 있다. 기존 연구에서 잔향음의 진폭은 레일리 분포를 따르고 위상은 불규칙적으로 분포하는 특성을 갖는다고 알려져 있다.[32] 따라서 불규칙한 잔향음의 위상 특성으로 인해 송신 신호와의 상관관계가 낮아지게 되므로 잔향음의 영향을 줄일 수 있는 반면, 표적 반향신호의 경우 상관관계가 높으므로 원하는 표적 신호를 구분할 수 있다. 하지만 표적의 속도가 크다면 표적 신호에 주파수 변이가 고려되기 때문에 송신 신호와의 상관관계가 낮아지게 되며, 표적 반향신호 분석이 어려워진다.
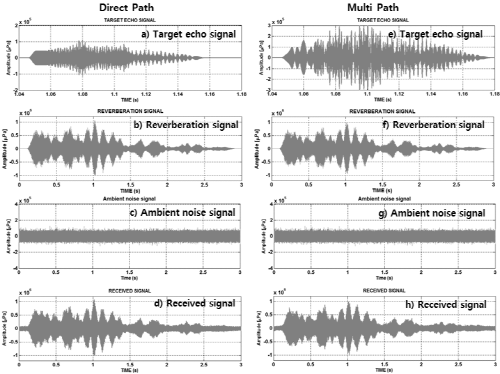
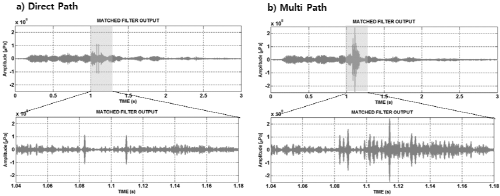
Fig. 17은 LFM 신호를 사용할 경우 직접경로 및 다중경로에 따른 신호 검출 결과이다. Fig. 17(a)와 같이 음파의 직접경로만을 고려할 경우 잔향음 신호 보다 송신 신호와의 상관성이 높아 표적 반향신호 수신 시간에서 뚜렷이 구별되는 순간 최대치가 존재하므로 표적 반향 신호를 검출할 수 있다. 하지만 Fig. 17(b)와 같이 음파의 다중 경로를 고려할 경우 다중 경로에 의해 신장된 표적 반향신호의 특성을 가지므로 다수의 순간 최대치가 존재하게 된다. 이러한 특성은 신호대 잡음비 관점에서 표적 신호의 에너지를 증가시키므로 소나시스템 탐지성능에 긍정적 영향을 미칠 수 있다. 하지만 시간상으로 신장된(time- elongation) 특성을 가지므로 허위 표적으로 오인될 가능성도 배제할 수 없다. 따라서 추후 다중 경로가 탐지 성능에 미치는 영향에 대한 연구가 필요할 것으로 판단되며, 본 논문에서 제시하는 시뮬레이터가 이러한 연구에 사용될 수 있을 것이다.
IV. 결론 및 향후 연구 계획
본 논문에서는 음선이론 기반의 고유음선 모델을 이용하여 음원-표적-수신기에 이르는 대표 다중경로를 계산하였고 음파의 전달경로와 표적 형상에 따라 다르게 배치되는 3차원 대표반향점을 고려하여 표적 반향신호를 모의하였다. 또한 주파수 대역에 따른 주변소음 신호, 경계면 특성 및 주파수, 산란 모델, 펄스 폭 등을 고려한 잔향음 신호를 모의하였으며, 마지막으로 표적 반향신호, 잔향음 신호, 소음 신호를 합성함으로써 수중음원에서 수신되는 신호를 모의하였다. 기존의 능동소나 탐지성능을 평가하기 위한 표적 반향신호모의 연구와는 달리 본 논문에서는 실제와 유사한 표적 반향신호를 모의하기 위해서 음원에서 표적간 직접경로와 다중경로에 따른 표적 반향신호의 차이를 비교 분석하였다. 모의 해양환경에서 송신신호(CW, LFM)에 따른 표적 탐지성능 분석 결과, CW 송신신호를 사용 시 표적 반향신호의 분석 방법은 주파수에 대한 분해능이 높기 때문에 수중음원 및 표적의 속도 그리고 방향성을 통해 계산되는 주파수 변이량을 이용하여 표적 반향신호를 분석 할 수 있다. 하지만 다중 경로를 고려했을 경우 직접 경로만을 고려 했을 때 보다 상대적으로 광대역 주파수 특성을 가지며 이는 표적탐지성능에 영향을 미칠 수 있게 된다. 또한 LFM 송신신호를 사용할 경우 주파수 변이량을 이용하여 잔향음이 존재하는 신호에서 표적 반향신호의 분석이 어려웠으나 정합필터를 이용하여 표적 반향신호에 비해 상관관계가 낮은 잔향음 및 주변소음의 영향을 줄임으로써 표적 반향신호를 분석 할 수 있었다. 하지만 다중 경로를 고려할 경우 다중 경로에 의해 신장된 표적 반향신호의 특성을 가지므로 표적의 위치 및 형상 추정을 어렵게 만들게 된다.
본 연구에서는 표적 반향 경로 모의 시 빠른 연산을 위하여 세립질 해저면을 가정 후 1회 이하의 경계면 반사를 가지는 고유음선들만을 사용하였다. 하지만, 해저면 손실이 상대적으로 적은 조립질 해저면에서의 표적신호 모의나 원거리에 위치한 표적에서의 표적 신호 모의를 위해서는 더 많은 경계면 반사를 가지는 고유음선까지도 고려하여야 할 것이다. 따라서 연산 시간과 시뮬레이션 성능 비교를 통한 거리 및 해저면 특성 별로 고려되어야 할 최적 고유음선 수 선정 연구가 추가 되어야 할 것이다.
또한 본 논문에서 제시한 3차원 대표반향점을 고려한 표적 반향신호 모의 연구의 검증을 위해 축소 모형을 이용한 해상실험이 요구된다. 또한 3차원 방향으로 고속주행 하는 수중음원의 표적 탐지모델 연구로 송신 위치와 수신 위치가 다른 경우 야기되는 표적 반향신호 및 잔향음 신호를 연구와 표적 반향신호의 특성을 분석하여 표적 탐지뿐만 아니라 표적의 형태, 자세각, 이동속도 등을 식별하여 표적의 위치 추정을 하는 연구가 필요하다.
