

I. 서 론
II. 연구 목적과 주요 방법론
2.1 소음 예측 모델링
2.2 Haptic Noise Index(HNI)를 통한 구동 주파수 선정
2.3 신호 생성 방법론
2.4 소음 저감 예측
III. 실험 및 결과
3.1 실험 셋업
3.2 결과
IV. 결 론
I. 서 론
최근 자동차 산업의 변화는 기존 내연기관 차량에서 전기차 및 하이브리드 차량으로 급격히 전환되고 있으며, 이에 따라 차량 내부 구성 또한 물리적 기계 부품 중심에서 디지털 기반 인포테인먼트 중심으로 재편되고 있다. 특히, 운전자와의 인터페이스 핵심 영역인 대시보드는 점차 디스플레이로 대체되고 있으며, 기존의 물리 버튼은 터치 시스템으로 대체되는 추세이다. 그러나 이러한 터치 기반 시스템은 운전 중 전방 주시가 필수적인 사용 환경에서 물리적 조작감을 제공하지 못하는 한계가 있다. 예를 들어, 운전자는 주행 중 히터나 오디오와 같은 기능을 시각적 확인 없이 조작해야 하는데, 물리 버튼이 제거되면서 조작 편의성이 저하되는 문제가 발생한다.
이러한 한계를 보완하기 위해, 자동차 업계는 디스플레이 햅틱 기술을 도입하고 있으며, 이에 따라 햅틱 피드백은 사용자 경험을 향상시키는 핵심 요소로 주목받고 있다. 구현의 용이성 측면에서 햅틱 피드백은 주로 진동 기반 방식으로 구현되며, 이는 크게 저주파 굽힘파를 이용한 방식과 초음파의 squeeze film effect를 이용한 방식으로 구분된다.[1,2] 이 중 초음파 기반 햅틱 기술은 정교한 질감 표현과 낮은 소음 특성이 장점[2]이나, 기술적 복잡성과 비용 문제로 인해 자동차 양산 단계에 적용된 사례는 드물다. 반면, 저주파 햅틱 기술은 다양한 형태로 상용화된 경험이 있으며, 표현력과 기술적 실현 가능성 측면에서 강점을 가진다.
그러나 디스플레이 기반 저주파 햅틱 시스템은 구조물 전체를 진동시키는 경향이 있고, 이로 인해 불필요한 음향 방사가 발생할 수 있다. 이는 특히 내연기관 엔진이 제거되고 정숙성을 중시하는 전기차 환경에서는 더욱 치명적인 문제로 작용한다.
소음 저감을 위한 기존 접근은 주로 하드웨어적 방법과 소프트웨어적 방법에 기반한다. 예를 들어, 하드웨어적으로는 점탄성 재료를 부착하거나 패널의 경계 조건을 조정하는 방식이 연구되어 왔다.[3] 또한 소프트웨어적 방법으로는 액추에이터를 패널에 특정 배열로 배치하여 진동장을 렌더링하는 연구 또한 진행되어왔다.[4] 하지만 이러한 방식들은 제품 구조 및 전자부품 배치에 영향을 크게 받기 때문에 실제 적용에 제약이 많다. 반면, 실제 적용에 주안점을 둔 소프트웨어 기반 접근은 진동 응답 기반 소음 예측 기법을 통해 소음을 유발하지 않는 입력 신호를 계산하는 방식이 제안된 바 있다.[5] 이 방식은 구조 변경 없이 제어 알고리즘만으로 소음을 줄일 수 있다는 장점이 있으나, 표면 진동 패턴이 고정되어 있어 다양한 햅틱 패턴 표현에는 한계가 있다.
이에 본 연구에서는 기존의 제약을 극복하고자, 특정 진동 패턴에 국한되지 않고도 효과적으로 소음을 저감할 수 있는 새로운 디스플레이 햅틱 구동 신호 설계 방법을 제안한다. 특히, Voice Coil Motor(VCM)의 구동 신호를 단순화하고, 실제 차량용 디스플레이 제품에 적용함으로써 실용성을 검증하고자 한다. 또한, 정량적 분석 및 실험을 통해 제안 방법의 유효성을 입증하고, 상업적 활용 가능성을 제시한다.
II. 연구 목적과 주요 방법론
본 연구는 진동 기반 햅틱 기술에서 디스플레이 터치 위치의 진동 가속도를 유지하면서, 불필요한 방사 소음을 줄이기 위한 소프트웨어 기반의 제어 방식을 제안한다. 기존 접근 방식은 구조적 제약이나 진동 패턴의 고정성이 존재하였으며, 이는 실제 양산 제품에 적용하기 어려운 한계가 있었다. 따라서 본 연구에서는 진동 패턴의 자유도는 보장하면서도 소음을 효과적으로 제어할 수 있는 알고리즘을 설계하였다.
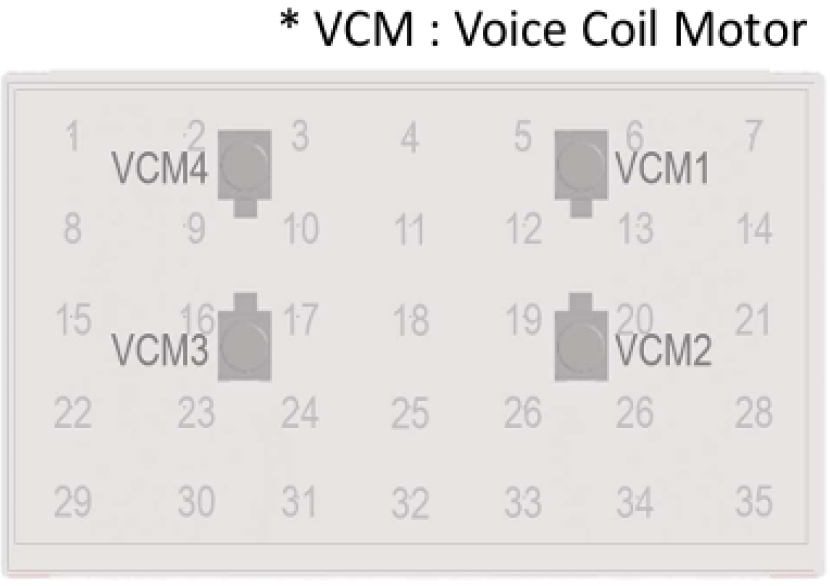
디스플레이에서의 터치 위치는 아래와 같이 정의된다. 본 연구에서 예시로 사용된 샘플은 Fig. 1에 도시된 바와 같이, 340 mm × 200 mm 크기의 패널로, 뒷면에는 총 4개의 VCM이 배치되어 있다. 진동이 측정되는 터치 위치는 좌상단에서 우하단까지 균등하게 7 × 5 격자로 분할되었으며, 총 35개 위치가 설정되었다. 각 터치 위치는 인덱스 로, 각 VCM은 인덱스 로 명명되어 이후 계산 및 최적화 과정에 사용된다.
2.1 소음 예측 모델링
Fig. 2에서 Equivalent Radiated Power(ERP)는 특정 주파수 대역에서 진동 구조물이 방사하는 음향 에너지를 정량화하는 지표이다. 실제로는 음향 효율 항(Radiation Loss Factor, RLF)이 포함되어 실측 데이터 기반의 실험적 방법으로 사용된다. 일반적인 ERP 계산식은 다음과 같다:[6]
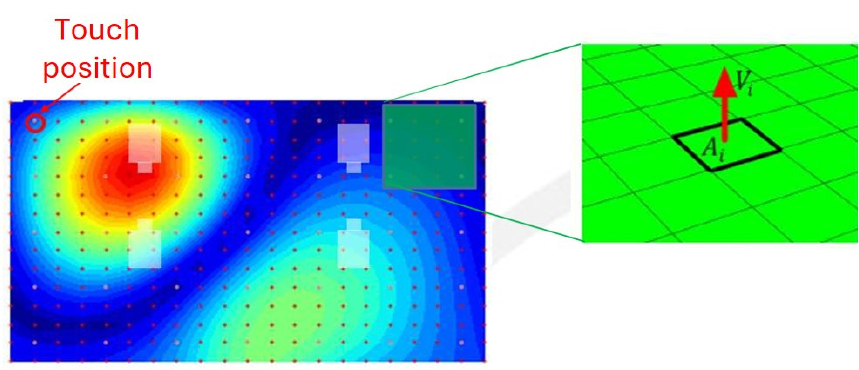
여기서 RLF는 패널 진동이 음향 에너지로 변환되는 효율을 나타내는 계수이며, 는 공기 중 음속,𝜌는 공기 밀도, 는 번째 터치 위치에서의 진동 속도, 는 해당 위치의 대표 면적이다. 본 연구에서는 사용 주파수 대역이 150 Hz – 300 Hz의 저주파 영역에 해당하므로 RLF를 1로 가정하고, 상수 항들을 제거하여 ERP를 다음과 같이 단순화하였다:
2.2 Haptic Noise Index(HNI)를 통한 구동 주파수 선정
앞서 서론에서 언급했듯, 본 연구에서는 진동 패턴의 제약 없이 가장 소음이 적은 구동 주파수를 선정하고자 하였다. 이를 위해 Haptic Noise Index(HNI)를 도입하였다. HNI는 각 주파수 에서의 방사 소음을 정량화 하는 지표로, ERP 값을 대상 위치의 진동 응답 제곱값으로 정규화 한 형태로 정의된다. 다음과 같이 수식화 할 수 있다:
여기서 는 주파수 f에서의 i번째 위치의 진동 응답이며, 는 해당 주파수에서의 방사 소음 예측 값이다. 는 주파수 선택을 위한 기준으로 활용되며, 값이 낮을수록 진동 효율은 유지하면서 소음은 적게 방사되는 특성이 있다.
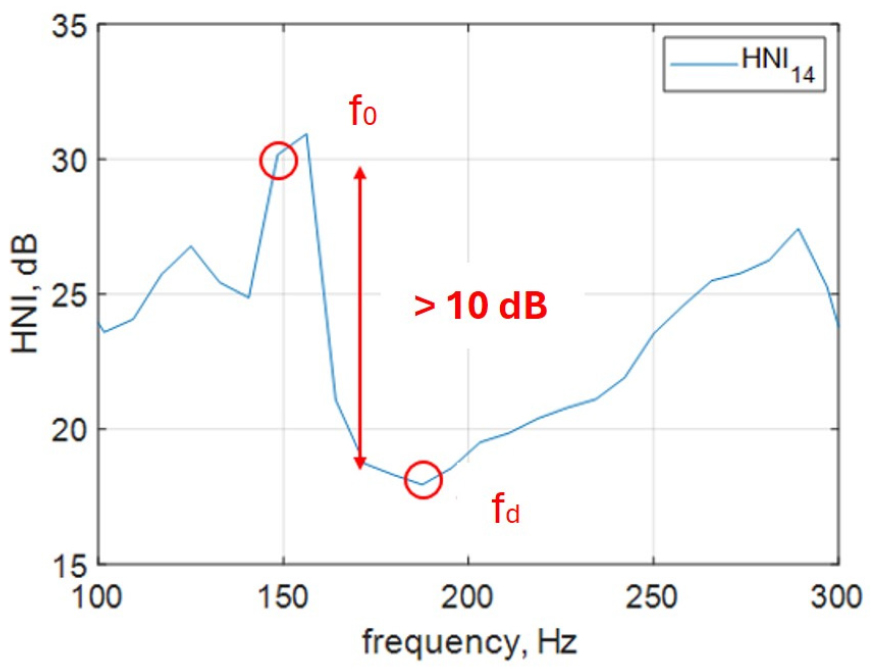
예를 들어, Fig. 3은 VCM4을 White Noise(WN)로 가진하였을 때 1번 위치에서 도출된 그래프이다. 경험적으로 디스플레이의 구석에서 구동소음이 크게 발생하는데, 이를 반영하여 1번 위치에서 HNI를 분석하고자 하였고, 물리적으로 가장 가까운 VCM4와의 관계식인 를 분석하고자 하였다. 분석 결과,가 가장 낮은 주파수는 범위[7]에서 190 Hz로 나타났으며, 이는 본 연구에서 구동 주파수 로 선정되었다. 통상적으로 현업에서는 VCM 공급사에서 제공하는 공진주파수를 구동주파수로 사용한다. 이 경우에, 본 연구에서 사용한 VCM의 공진주파수 는 150 Hz이며 HNI가 30 dB에 육박하게 된다. 본 연구에서는 햅틱 구동 주파수 범위에서 이보다 10 dB이상 작은 190 Hz를 구동주파수로 하여 디스플레이 구석에서 같은 진동 세기를 발생시킬 때, ERP가 최소가 되도록 하였고, 즉, 디스플레이 전체가 덜 떨리게 하는 효과를 얻고자 하였다.
2.3 신호 생성 방법론
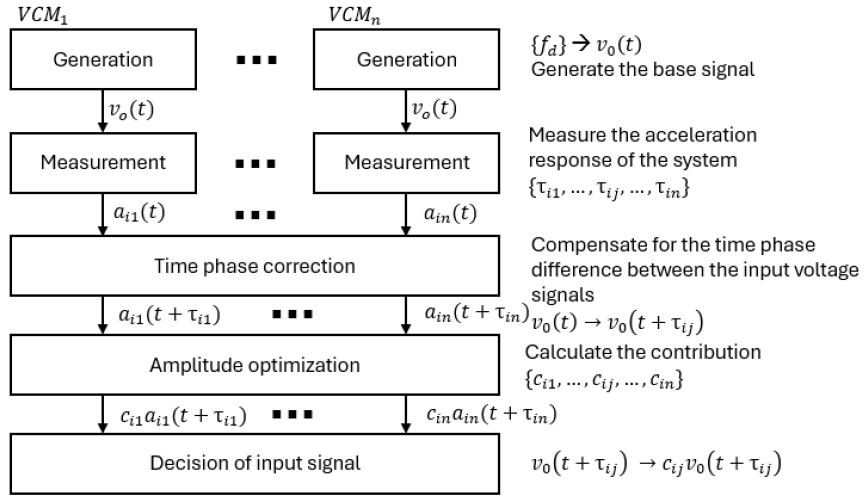
신호 생성 방법론은 Fig. 4에 제시된 알고리즘 흐름에 따라 구성된다. 이 알고리즘 흐름을 모든 터치위치(본 연구에서는 35가지 위치)에서 반복항 신호를 생성하게된다. 첫 단계에서는 각 VCM에 입력될 기본 신호를 생성한다. 구동 주파수는 앞선 2.2절에서 선정한 최적 주파수 를 기반으로 하며, 기본 신호는 3주기 이상의 순수 사인파 형태로 구성된다. 여기에는 임펄스 특성을 부여하기 위해 Tapering 기법이 적용되었다. 기본 신호가 정의되면, 알고리즘적으로 조정 가능한 두 개의 제어 파라미터가 존재한다: (1) 각 VCM 간 위상차 , (2) 각 VCM에 입력될 진폭 계수 이다. 우선, 터치 포인트에서의 진동 가속도를 최대화하기 위해 위상차 를 설정한다. 이를 위해 동일한 기본 신호를 VCM에 동시 입력하고, 각 터치 위치 에서의 가속도 응답을 측정한다. 측정된 시계열 데이터로부터 가속도가 최대가 되는 시점을 분석하고, 이 시간 정보를 기반으로 각 VCM의 상대 위상차 를 계산한다. 다음 단계에서는 방사 소음을 최소화하기 위해 각 VCM의 진폭 계수 를 최적화한다. 이를 위해 최적화 문제를 정의하였고 설계 변수는 다음과 같이 정의된다.:
최적화 문제의 수식은 아래와 같이 정의된다.
위 식에서 은 터치위치의 개수, 은 VCM의 개수, 는 번째 위치에서의 진동 속도, 는 번째 위치에서 진동 가속도이며, 는 임의의로 정한 진동 가속도의 크기 이다. Eq. (5)는 목적함수이다. i번째 위치를 사용자가 터치하였을 때 소음의 크기를 모델링한 것으로써, Eq. (6)과 같이 패널 전체의 진동을 합한 ERP로 모델링된다. Eq. (7)은 제약 조건이다. 터치 위치 i에서 진동 세기를 유지하면서 소음을 최소화 하기 위해 진동 크기 를 상수로 유지하도록 하였다. 즉, 진동 체감이 유지되도록 하기 위한 물리적 조건이 적용된다. 초기 진폭 벡터 는 값([1 1 1 1], [1 0 0 0], [0 1 0 0], [0 0 1 0], [0 0 0 1])을 일괄 사용하여 로컬 최소값에 수렴하지 않도록 설계되었다. 최적화 알고리즘은 비선형 제약 조건이 존재하는 최적화 문제이므로 Newton 방법을 응용한 Sequential Quadratic Programming(SQP) 기법을 사용하였다.[8] 총 개의 터치 위치에 대해 이 최적화 과정을 반복 수행함으로써, 각 위치에 최적화된 진폭 벡터 를 도출하였다.
2.4 소음 저감 예측
2.3절의 방법을 이용하여 신호를 생성한 후, 소음 저감 효과를 정량적으로 예측하고 분석하였다. Fig. 1에 도시된 도면대로 =35, =4인 경우에 대해 Fig. 5은 각 VCM 간 위상차 를 측정하고 이를 시각화한 결과이다. 패널 도면을 기준으로 하였을 때, 일반적으로 VCM 위치에서 멀어질수록 도달 시간이 증가하는 경향이 나타날 것으로 예상되지만, 실험 결과에서는 이러한 관계성이 뚜렷하게 관찰되지 않았다. 이는 단순한 거리 기반 위상 결정이 아닌, 패널 고정 조건(예: 테이프 고정)에 따라 형성되는 반사파 및 간섭 효과가 위상 결정에 큰 영향을 미치기 때문으로 해석된다.
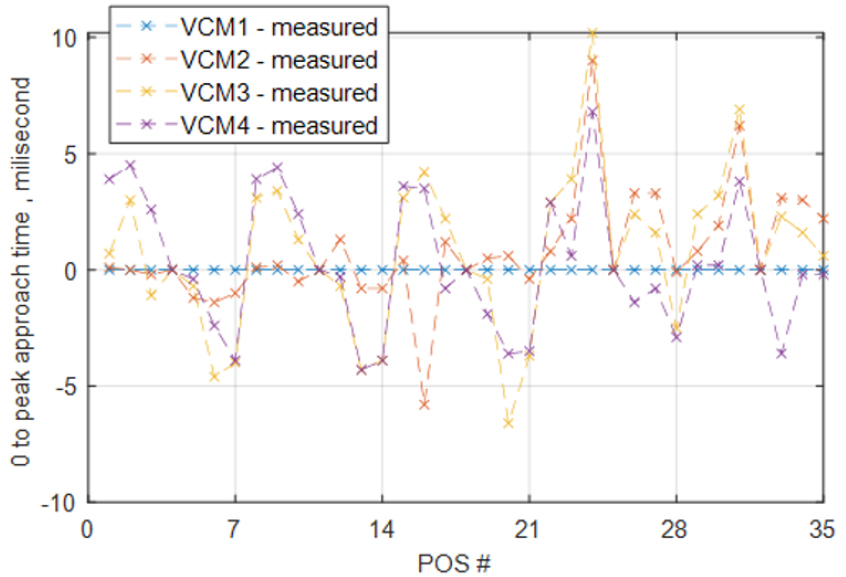
이러한 이유로, 실제 제품 개발 및 양산 단계에서는 VCM 간 위상차를 단순 거리 기준으로 설정하는 것보다는, 실측을 통해 정밀하게 측정한 값을 활용하는 것이 보다 신뢰성과 반복성이 높다.
한편, Fig. 6는 각 VCM에 입력될 진폭 계수를 터치 위치별로 최적화하여 도시화한 것이다. 해당 최적화는 2.2절에서 설명한 바와 같이 HNI를 기반으로 구동 주파수 를 선정한 뒤, 각 터치 위치에서 ERP를 최소화하는 방향으로 수행되었다.
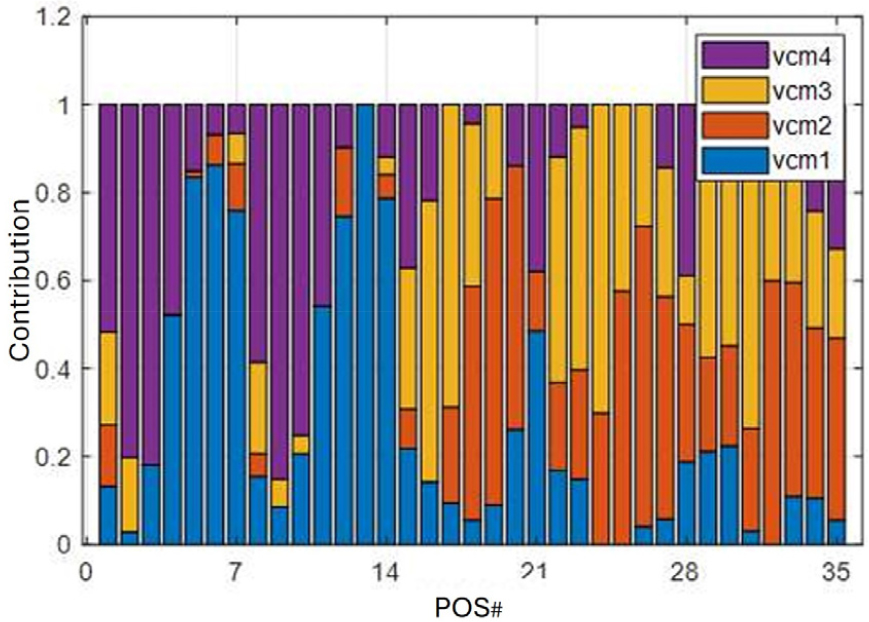
이 접근법은 공진을 유발하는 주파수를 피하고, 정재파 형성이 억제되는 주파수 대역을 유도함으로써 소음을 저감 시킨다. 결과적으로, 최적화된 진폭 분포에서는 터치 위치에 가장 인접한 VCM의 기여도가 상대적으로 크게 나타났으며, 이는 물리적으로도 직관적인 진동 전달 경로를 반영한 결과이다.
Fig. 7은 ERP기법을 이용하여 2.3절에서 제시한 입력 신호 생성 과정의 각 단계가 소음 저감에 미치는 효과를 비교·분석한 결과를 도시화한 것이다. 위상차 및 진폭 최적화 기법을 적용하지 않은 기준 신호와, 위상차만 적용한 경우를 비교하였을 때, 디스플레이 하단 좌우 영역의 터치 위치에서는 최대 7 dB 수준의 소음 저감 효과가 관찰되었다. 이는 해당 영역이 반사파의 영향을 많이 받는 구조적 특성을 갖고 있음을 시사한다.
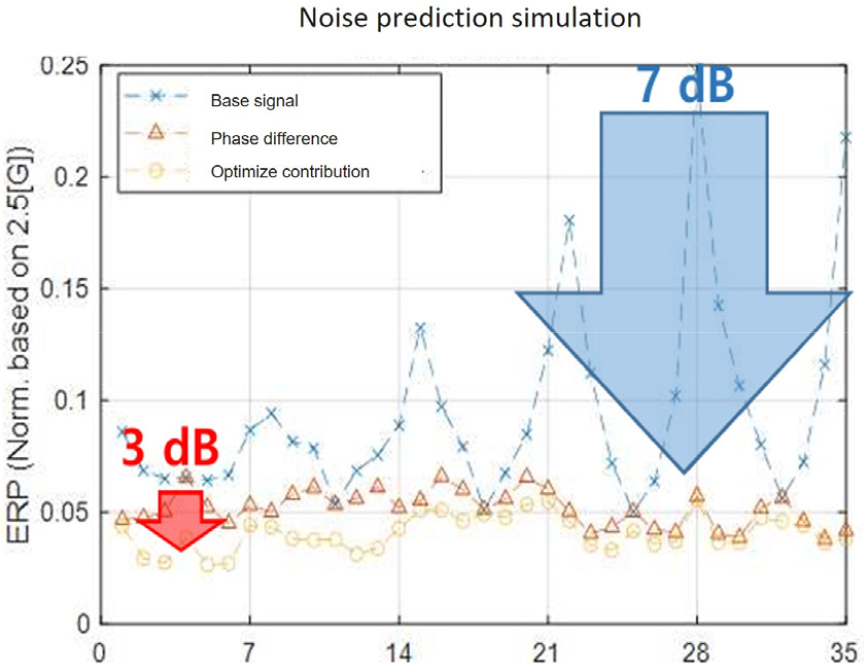
한편, 위상차가 적용된 신호와 여기에 진폭 최적화까지 포함된 신호를 비교하면, 디스플레이 상부 영역에서 최대 3 dB의 추가적인 소음 저감 효과가 나타났다. 이는 해당 위치에서 가장 가까운 VCM에 에너지가 집중되도록 신호가 조정되었기 때문이며, 구조적 기여도가 높은 VCM의 효과적인 강제가진 결과로 해석될 수 있다.
III. 실험 및 결과
3.1 실험 셋업
본 연구에서는 Fig. 1의 도면과 동일한 자사 차량용 Center Information Display(CID) 디스플레이를 대상으로 햅틱 시스템의 소음 저감 효과를 검증하였다. Fig. 8은 실험 셋업을 나타낸 것이다. 실험은 반무향 조건에서 수행되었으며, 측정 시스템과 환경은 다음과 같다.
(1) 실험 대상: 자사 차량용 CID 디스플레이 시스템
(2) 측정 환경: 반무향실 조건(ISO 3745 준수), 송수신기 간 거리 0.5 m
(3) 측정 장비: Head and Torso 시뮬레이터(HATS) 사용, 신호 제어 MCU 및 DAQ 시스템

햅틱 구동 신호는 각 터치 위치별로 사전 저장된 신호를 이용하였으며, 총 4개의 VCM 채널을 통해 제어되었다. 각 위치에 대해 1초 간격으로 반복 가진 하였고, 총 20 s간 데이터를 취득하였다. 터치 위치는 디스플레이 표면을 7 × 5 격자로 나누어 총 35개 포지션을 기준으로 측정이 이루어졌다.
측정 항목은 각 위치 별 방사 소음의 크기를 라우드니스(Sone) 기준으로 정량화 하였으며, 모든 실험은 각 터치 위치에서의 진동 가속도를 로 보정한 상태에서 수행되었다. 라우드니스 계산은 고객사 요구 기준대로 Zwicker 방법을 기반으로 소리의 라우드니스를 계산하였다[DIN 45631/A1:2010-03]. 이 방법은 Sound Pressure Level(SPL)를 1/3 옥타브 대역으로 분할하고, 각 대역에 대해 청각 가중치를 적용하는 계산한다. 1 s 당 1번의 신호를 총 20 s 동안 가진하고 HATS마이크로 데이터를 수집하였다.
3.2 결과
본 실험에서는 2.3절의 신호 생성 방법이 적용되지 않은 기존 신호와, 제안된 알고리즘이 적용된 최적화 신호 두 가지를 대상으로 비교 평가를 수행하였다. 측정 결과는 Fig. 9에 도시하였다.
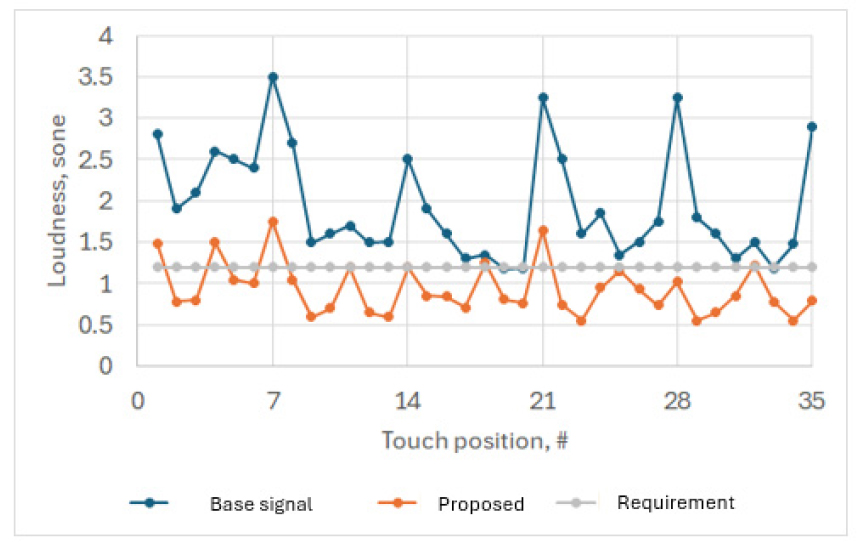
실험 결과, 본 연구에서 제안한 최적화 신호는 기존 신호에 비해 평균 약 30 %의 소음 저감 효과를 나타내었으며, 최대 10 dB 수준의 감소가 관찰되었다. 특히 디스플레이의 중앙부보다 좌우 끝단에 위치한 터치 포인트에서 소음 저감 효과가 두드러졌는데, 이는 해당 위치들이 반사파의 영향을 크게 받고, 각 VCM으로부터의 거리 차이가 뚜렷하게 존재하기 때문으로 해석된다.
또한 고객사 요구 기준인 1.2 sone 이하를 만족해야 한다는 조건 하에서, 알고리즘 적용 전에는 35개 위치 중 32개 위치가 기준을 초과하였던 반면, 알고리즘 적용 후에는 6개 위치만이 기준을 초과하였다.
이는 기구적인 변경 없이 알고리즘 개선만으로 소음 저감 성능을 유의미하게 향상시킬 수 있음을 보여주며, 실차 개발 환경에서도 충분히 적용 가능성이 있음을 시사한다. 다만 여전히 기준치를 초과하는 일부 위치에 대해서는 구조적 보완이 필요하며, 향후 해당 포인트를 중심으로 기구적 변경과 소프트웨어적 최적화를 병행한다면, 더욱 긍정적인 성과가 기대된다.
IV. 결 론
본 연구는 ERP 및HNI를 기반으로 한 디스플레이 햅틱 소음 예측 및 저감 방법론을 제안하고, 실험을 통해 그 효과를 정량적으로 검증하였다. 제안된 알고리즘은 평균적으로 약 30 %, 최대 10 dB 수준의 소음 감소 효과를 보였으며, 고객사에서 요구하는 소음 기준(1.2 sone 이하)을 충족시키기 위한 기술적 가능성을 제시하였다.
또한, 본 연구는 터치 위치별 성능 정량화를 통해 VCM 개수와 위치, 진동 특성 간의 상관관계를 분석하였으며, 이를 통해 향후 햅틱 시스템의 설계 방향성을 제시하였다. 본 연구의 알고리즘은 기구 구조 변경 없이도 적용 가능하며, 이는 실제 제품 개발 시 적용 유연성을 높이는 데 기여할 수 있다.
향후 연구에서는 제품의 구조적 특성이나 조립 상태 변화에 따른 시뮬레이션 기반의 햅틱 성능 예측이 필요하며, 본 연구는 그 기초 데이터를 제공하는 데 의의가 있다. 특히 HNI를 이용한 구동 주파수 선택 기준이 본 연구에서는 특정 포인트(1번 위치)에 국한되어 있었기 때문에, 전체 패널 영역에 대한 정량화된 주파수 선택 알고리즘의 개발이 필요하다. 이를 통해 더욱 일반화된 햅틱 소음 저감 플랫폼으로 확장 가능할 것으로 기대된다.
더불어 본 연구에서는 소음 예측 시 ERP기법을 사용하였다. 다만 저주파 가정으로 RLF가 1에 수렴할 것이라는 가정은 추가 검토가 필요하다. 좀 더 연산이 필요한 모델인 Boundary Element Method(BEM)이나 Rayleigh integral 등을 통해 주변 요소들의 상호영향을 좀 더 고려한다면, 중앙부나 디스플레이 구석에서 좀 더 나은 소음 예측이 가능하고 구동 소음의 추가 개선까지 기대된다.
