

I. 서 론
파노라마 썬루프 오픈 시 발생되는 소음은 크게 세가지로 구분할 수 있다. 첫째는 유동 가진과 차체 음장 모드 사이의 헬름홀쯔 공진으로 발생하는 드론 소음, 둘째는 파노라마 썬루프 오픈 글라스 또는 루프가 외부 유동에 노출되어 발생하는 루프 부밍, 마지막으로 전방의 썬루프 디플렉터 혹은 후방의 썬루프 개구부가 유동에 노출되어 발생하는 난류소음이다. 파노라마 썬루프에 드론 소음, 루프 부밍, 후방 썬루프 개구부 난류 소음을 방지하기 위해서 최근에는 메쉬형 디플렉터가 널리 쓰인다. 하지만 이 디플렉터는 외부 유동에 노출되어 썬루프 오픈 상태에서 고속 주행 시 때때로 고객이 불만할 수 있는 난류소음을 발생시킨다. 일반적으로 디플렉터의 높이가 상승할수록 드론 소음, 루프 부밍, 후방 썬루프 개구부 난류소음에 유리하며, 디플렉터 난류소음은 불리해진다. 따라서 디플렉터의 높이로 인하여 발생하는 공력소음을 모두 만족시키기 위해 개발단계에서 디플렉터 높이의 최적 설정이 필요하다.
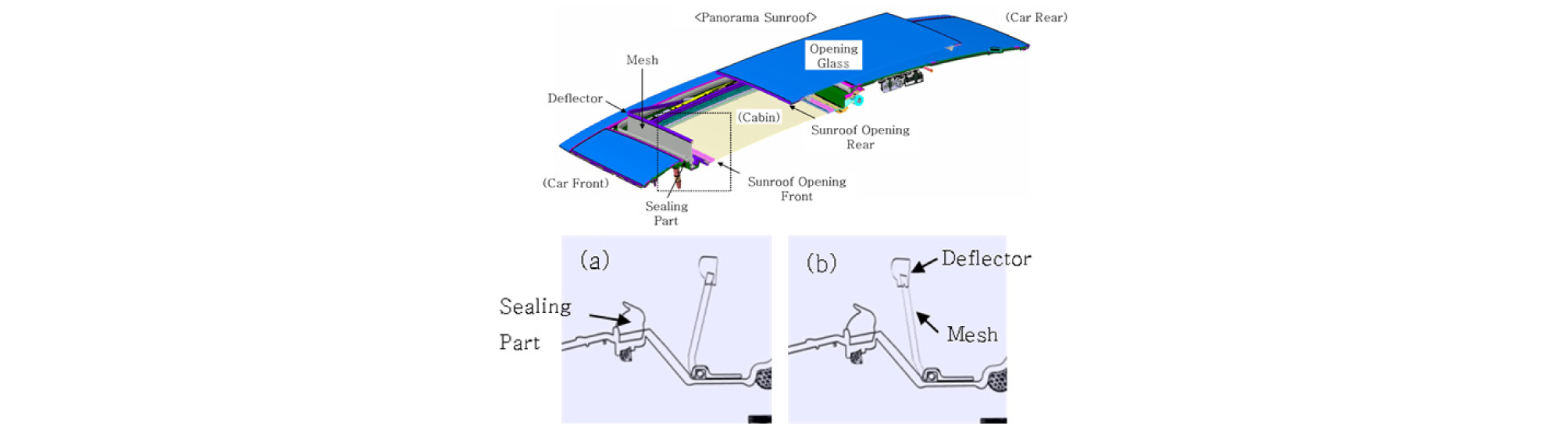
본 연구에서는 파노라마 썬루프의 드론소음, 루프부밍, 썬루프 구조물 난류소음과 상충성능인 디플렉터 난류소음을 함께 만족시키기 위해 전방경사형 메쉬 단면 형상을 가지는 디플렉터를 제안한다. 현재 당사 모든 메쉬 디플렉터는 Fig. 1(a)와 같이 후방경사형 구조이다. 전방경사형 메쉬 디플렉터는 Fig. 1(b)와 같이 전방 경사 구조를 가진다. 본 연구에서 전방경사형 디플렉터의 원리를 파악하기 위해 CAT(Computer Aided Test)를 수행하고, 실차에서 효과를 파악하기 위해 실차 무향 풍동 평가를 수행하였다. 풍동의 암소음은 100 km/h에서 54 dB이며, Cutoff주파수는 80 Hz이다. 또한 바람소리 성능이 우수한 전방경사형 디플렉터와 구조물에 대하여 특허(제안명칭: 가변형 선루프 디플렉터 구조, 출원번호: 1020170103246)를 출원하였다.
II. 본 론
2.1 전방경사형 디플렉터의 성능 연구
2.1.1 CAT를 통한 공력소음 영향 연구
전방경사형 디플렉터의 효과를 확인하기 위해 상용프로그램인 Powerflow를 사용하여 유동 해석을 수행하였다. Powerflow는 LBM(Lattice Boltzmann Method)를 사용하며 Navier Stokes Equation을 사용하는 일반적인 CFD(Computational Fluid Dynamics)와 차이가 있다. LBM에서는 Eq. (1)과 같은 지배 방정식을 사용하며 공기 입자의 충돌 전후 과정을 모사하여 유동 해석을 수행한다.[1]
(1)
여기서 fi는 i방향으로 이동하는 입자 분포 함수이며, CiΔt와 Δt는 공간과 시간 변화량이다. 또한 RNG(ReNormalization Group) 2-equation 모델 기반의 V-LES(Very-Large Eddy Simulation)를 사용하여 난류 유동장을 계산하였다.
일반 썬루프에 장착되는 튜브형 디플렉터의 공력소음 해석 기법은 2010년 개발되었으며[2] 파노라마 썬루프에 장착되는 메쉬형 디플렉터의 공력소음 해석 기법은 2014년 개발되었다. 본 연구에서는 2014년 당사에서 개발한 “디지털 차량 개발을 위한 파노라마 썬루프 바람소리 CAT법”을 활용하였다. 이 CAT 기법은 메쉬형 디플렉터를 다공성 물질(porous media)로 가정하고 디플렉터 메쉬 표면 전후로 코브라 프로브를 활용하여 속도별 압력 손실 특성을 구하고 이를 다공성 물질에 적용하여 디플렉터 주위 유동을 모사하였다. 또한, CAT 기법 개발 당시 시험값과 비교를 통하여 검증하였으며, 메쉬 디플렉터에서 드론 소음이 개선되는 원리로 메쉬 디플렉터 통과 후의 유동 상승을 주 요인으로 추정하였다.[2]
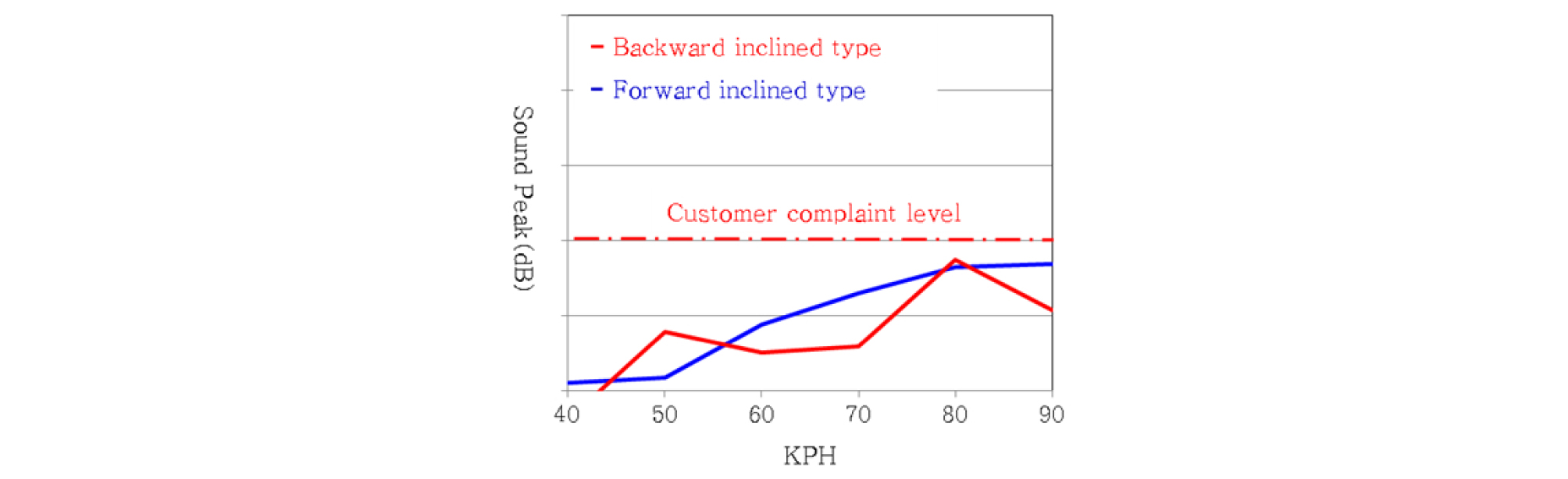
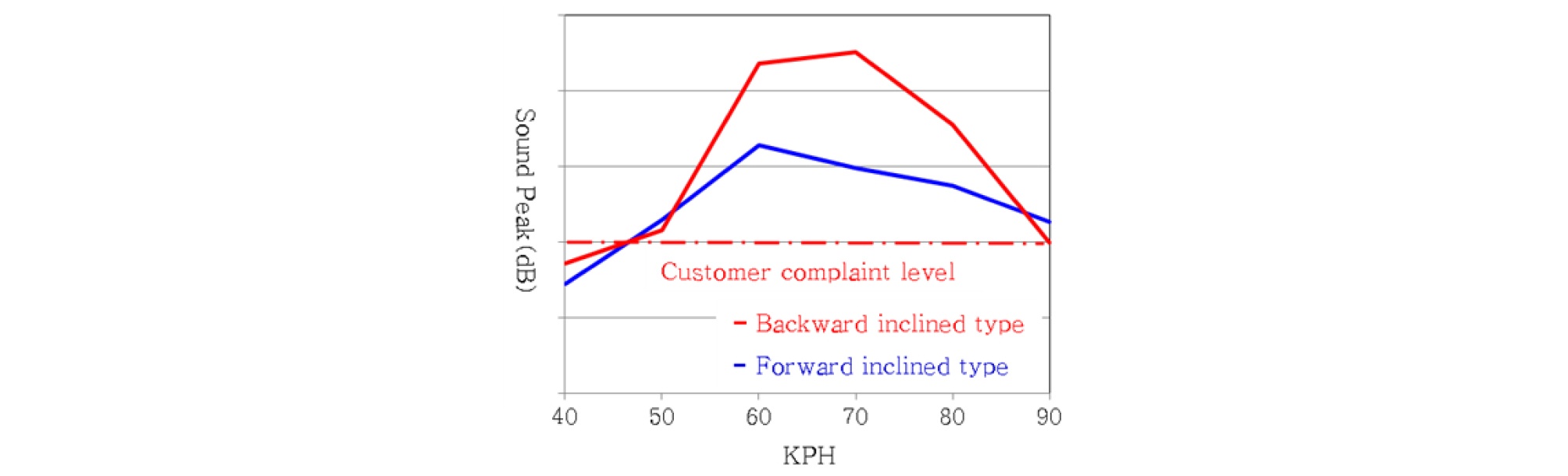
해석 모델은 당사 준중형 해치백 차종으로 수행하였고, 디플렉터 높이는 기존 높이, 1/2높이에서 후방경사형(각도 -8˚), 전방경사형(각도 +8˚)으로 구분하여 각각 수행하였다. 해석 결과 Fig. 2와 같이 기존 높이에서 후방경사형과 전방경사형 모두 드론 소음이 고객 불만 수준 이하로 발생하였다. 1/2 높이에서는 Fig. 3과 같이 전방경사형의 드론 소음이 후방경사형 대비 60 km/h에서 10 dB 개선되었으나, 두 경우 모두 드론 소음이 고객 불만 수준을 초과하는 것을 확인할 수 있다.
두 가지 디플렉터의 성능 비교를 위해서 우선 1/2높이 디플렉터 CAT 결과를 상세 분석하여 드론 소음의 영향을 살피고, 이후 기존 높이에서의 CAT 결과를 분석하여 난류 소음에의 영향을 보기로 한다.
1/2높이 디플렉터에서 전방경사형이 후방경사형 대비 드론소음이 개선되는 원인은 Fig. 4에서 확인할 수 있다. Fig. 4(b)와 같이 전방경사형 구조로 인하여 메쉬를 통과하는 유동이 상승하게 되며, 상승 유동이 실내를 가진하는 하강 유동을 약화시켜 드론 소음을 개선시킨다. 이는 당사에서 수행한 2014년 연구에서 디플렉터의 메쉬 통과 후 유동 상승이 강해지는 것으로 설명할 수 있다.
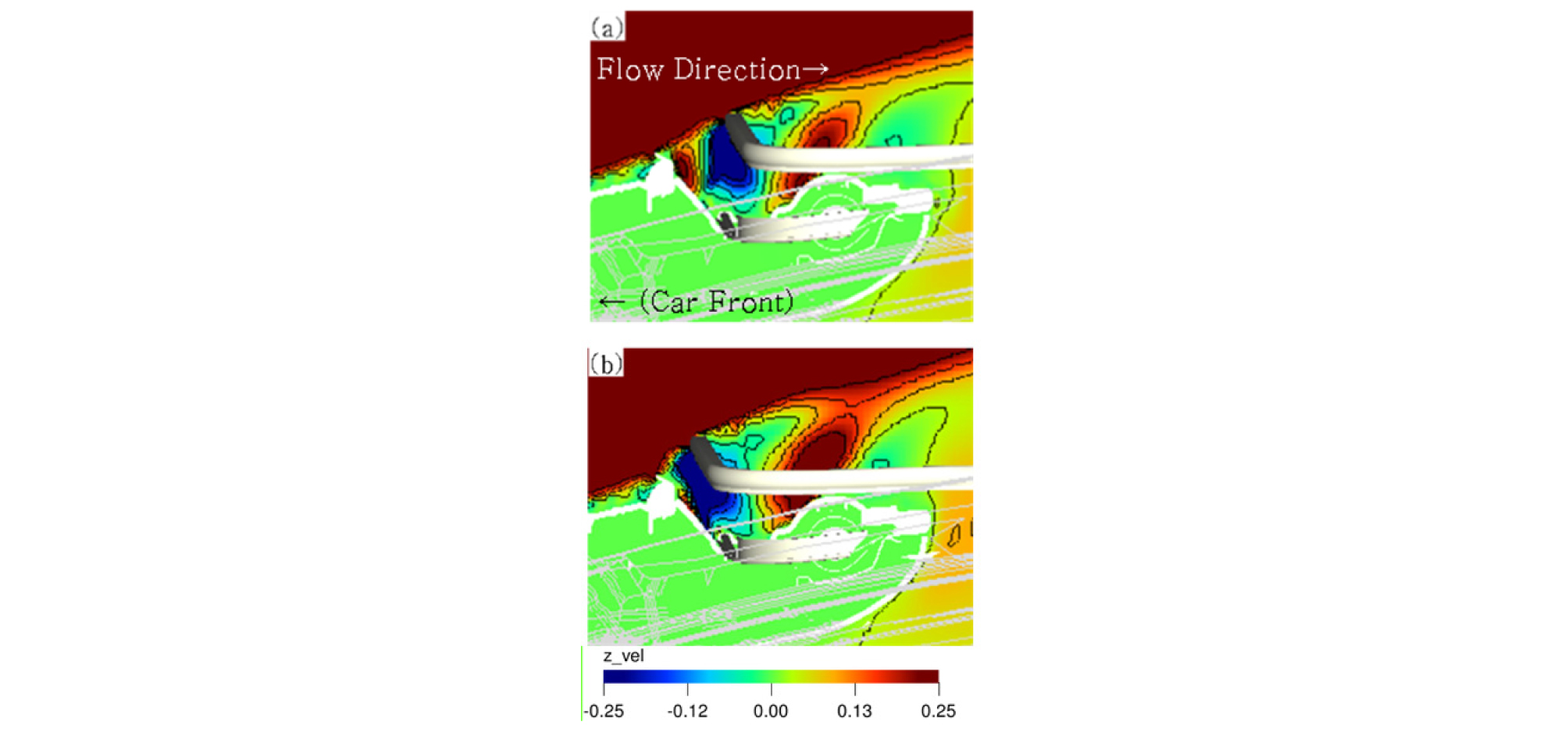
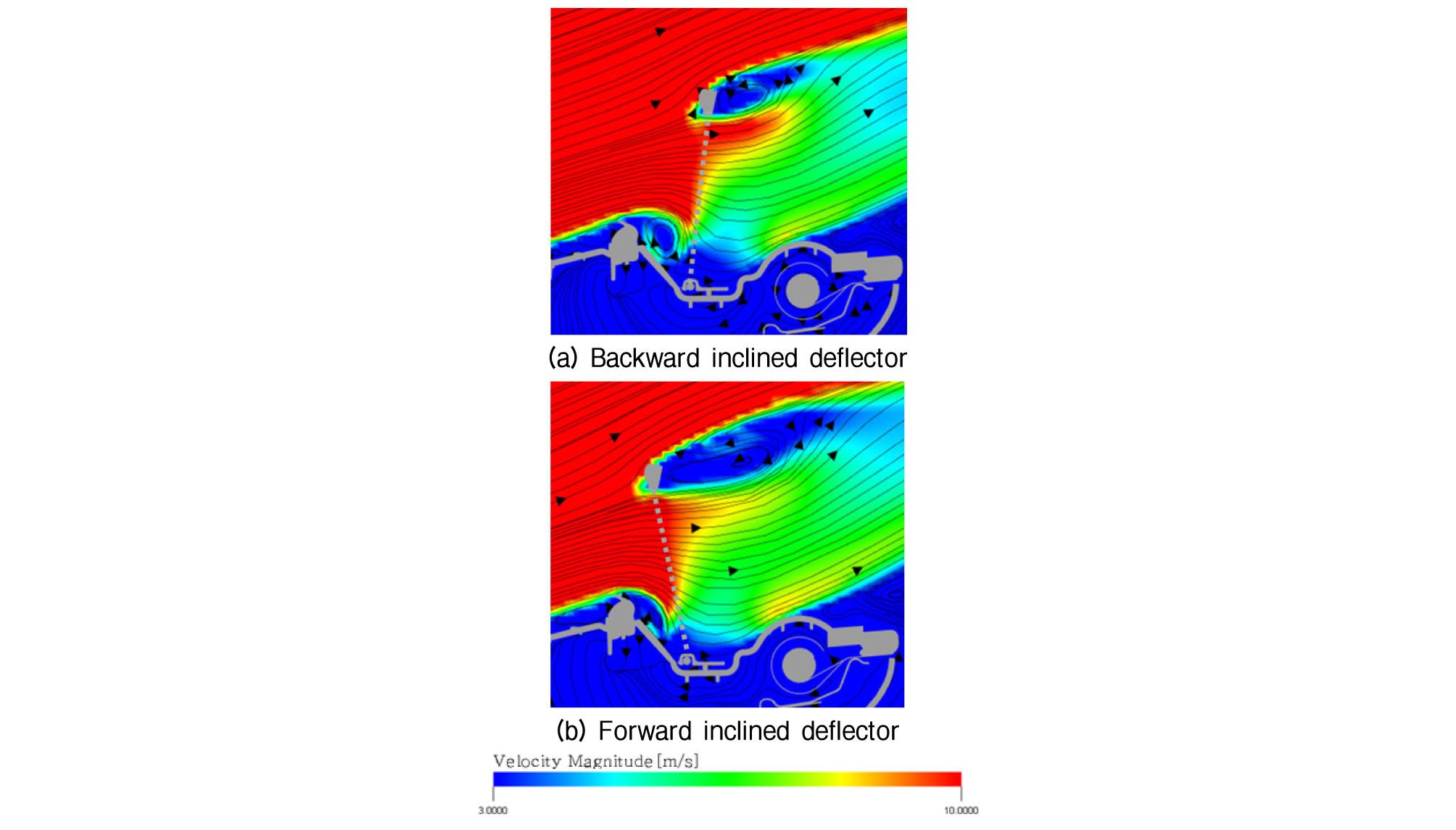
Fig. 4와 같이 1/2 높이의 전방경사형 디플렉터가 후방경사형 대비 Z방향 성분이 커지는 이유를 확인하기 위해 평균유동장의 유선과 유속을 확인하였다.
후방경사형 디플렉터에서 Fig. 5(a)와 같이 메쉬면을 따라 유동이 상방향으로 유도되어 메쉬 전방의 실링면에서 유동 박리가 발생한다. 유동 박리로 인하여 메쉬 통과 전 유로가 좁아지고 메쉬를 통과하는 유동이 메쉬의 상단부로 더 많이 흐르게 된다. 이로 인하여 메쉬 통과 후 상단부 유속이 하단부 유속보다 크게 되고, 시계 방향의 회전 성분이 발생한다. 이는 메쉬 통과 후 Vortex Shedding의 회전 성분인 시계 반대 방향과 역방향으로 메쉬를 통과한 유동의 상승 효과를 약화시키는 요인이 된다.
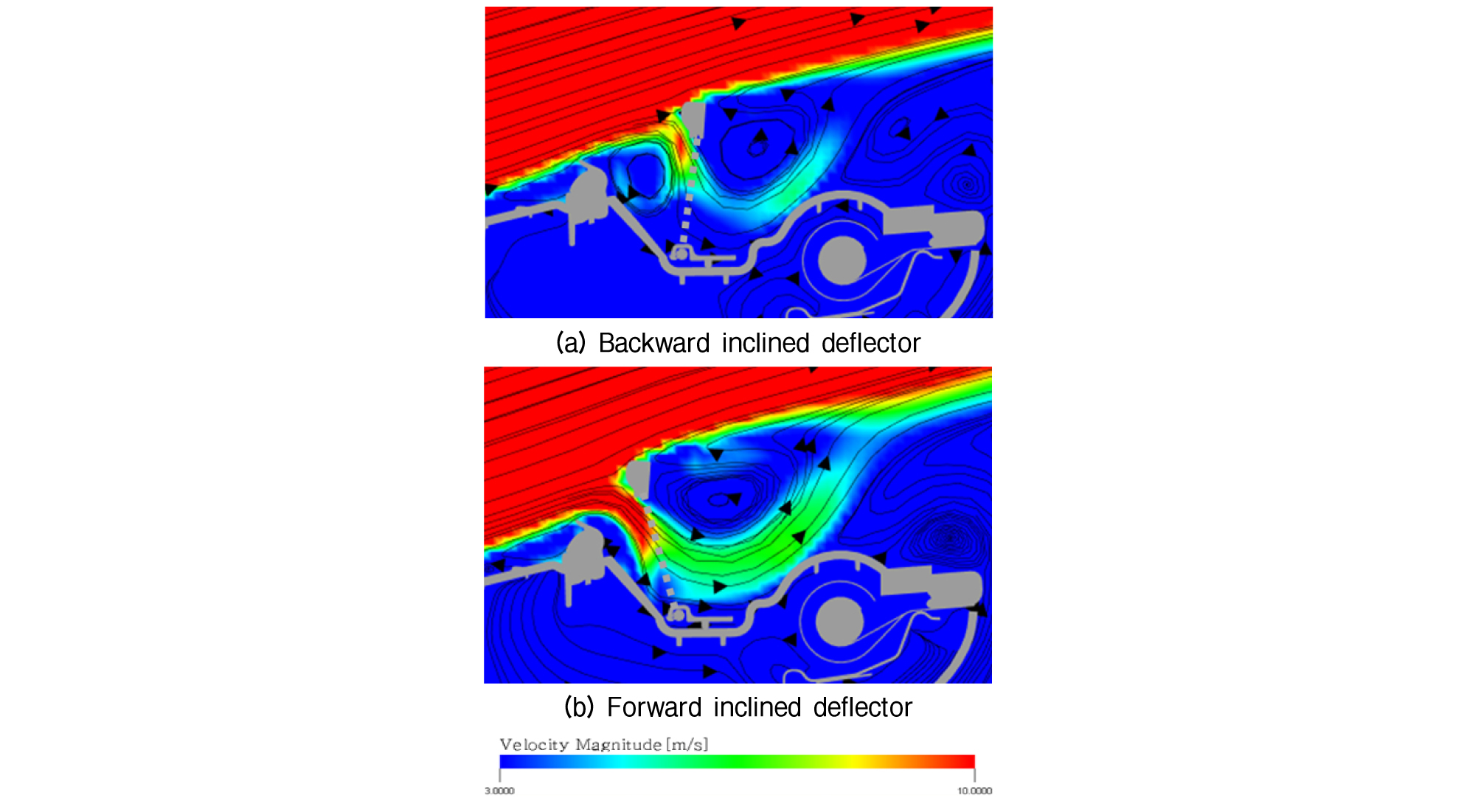
반대로 전방경사형 디플렉터에서는 Fig. 5(b)와 같이 메쉬의 전방 경사각에 의해 메쉬 통과 전 유동이 하방향으로 유도되어 더 메쉬 하단부 유속이 더 높게 된다. 이로 인하여 메쉬 통과 후 유동의 하단부 유속이 상단부보다 높게 되는 유속 역전 현상이 일어나게 되고, 유속 역전 현상으로 인하여 시계 반대 방향의 회전 성분이 발생한다. 이는 유동이 메쉬 디플렉터를 통과 한 후 회전 성분과 동일 방향으로 유동의 상승 효과를 배가하는 요인이 된다.
디플렉터 1/2높이에서 메쉬 통과 전후의 유속 분포를 자세히 살펴보기 위해 Fig. 6과 같은 위치에서 속도 분포를 확인하였다. 차량 절대 높이 기준으로 메쉬 디플렉터 하단 높이인 1.14 m부터 1.24 m까지 속도 분포를 확인하였다. Fig. 6에서 (a)는 메쉬 통과 전 속도 분포 위치이며, (b)는 메쉬 통과 후 위치를, (c)는 파노라마 썬루프 개구부 전단에서 위치를 나타낸다.

메쉬 통과 전 속도 분포를 Fig. 7에 나타내었다. 앞에서 예측한 바와 같이 전방경사형 디플렉터에서 후방경사형 대비 하단부 유속이 더 높은 것을 확인할 수 있다.
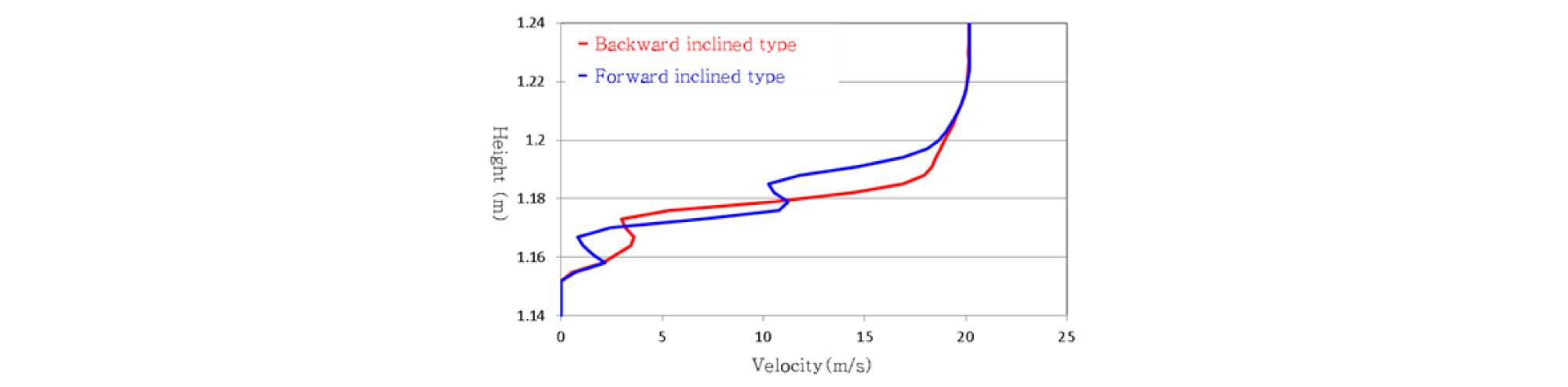
Fig. 8에서 메쉬 통과 후 속도 분포를 확인할 수 있다. 메쉬 통과 전 속도 분포와 유사하게 메쉬 통과 후에도 전방경사형 디플렉터에서 후방경사형 대비 하단부 유속이 더 높으며, 최대 유속이 발생한 높이 또한 더 낮은 것을 확인할 수 있다. 최대 유속이 발생한 높이부터 디플렉터 바 높이까지 유속 분포의 역전 현상이 나타나며 이는 앞에서 유선을 통해 예측한 내용과 일치한다. 이러한 유속 역전 구간이 긴 전방경사형에서 후방경사형 대비 와류 현상이 강하게 일어나게 되고 유동 상승이 강해져 드론 소음에 유리할 것으로 예상된다.
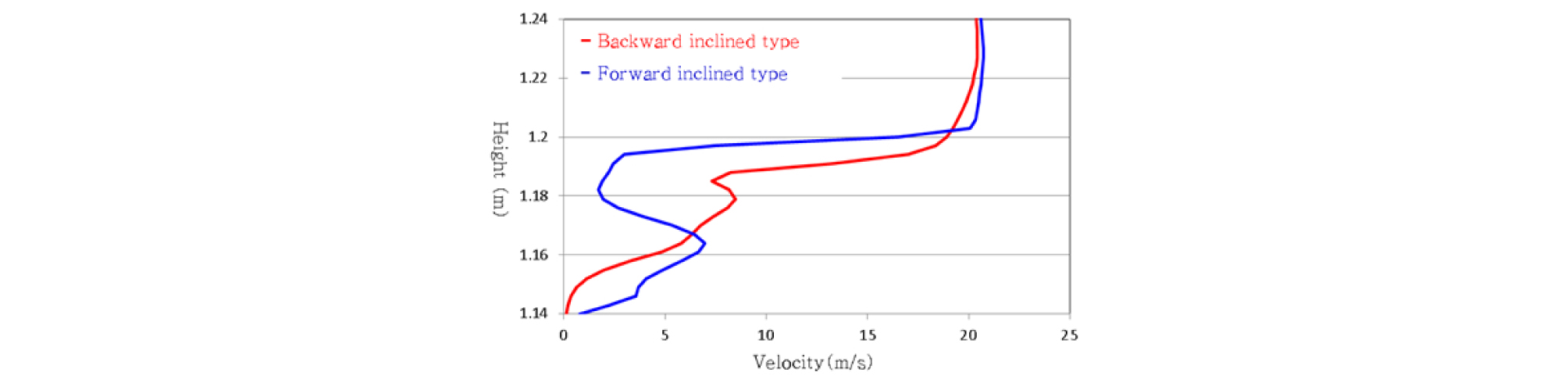
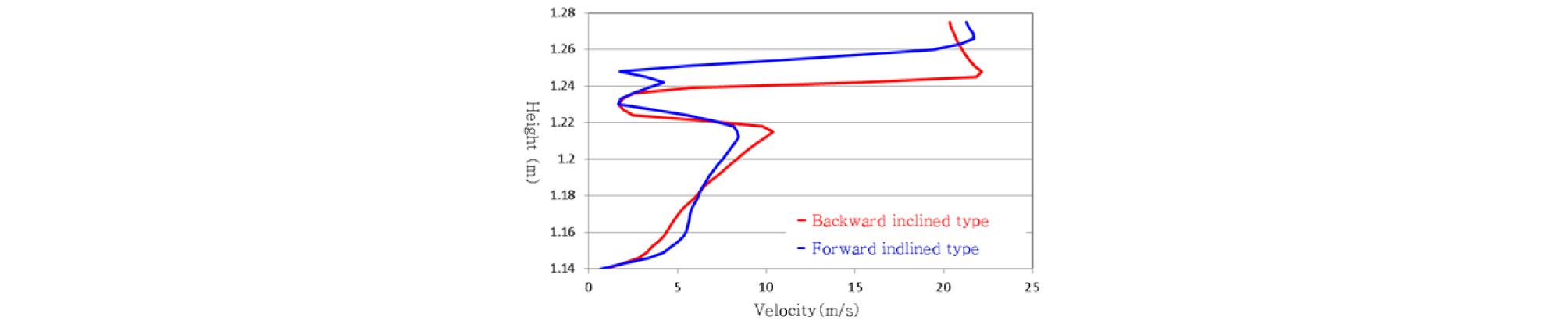
Fig. 9에서 메쉬를 통과한 유동이 개구부 전단에 도착했을 때 속도 분포를 나타내었다. 썬루프 구조물에 노출될 수 있는 1.24 m 높이까지의 속도 분포를 보면 1.2 m 이후부터 전방경사형 디플렉터에서 후방경사형 대비 유속이 낮아진다. 이로 인하여 전방경사형 디플렉터에서 후방의 썬루프 개구부가 상대적으로 낮은 유속의 유동에 노출되어 난류소음과 루프 부밍이 유리할 것으로 예상된다. 난류소음을 자세히 분석하기 위해 실제 차량에 장착되는 디플렉터의 기존 높이에서 CAT 결과의 유속을 분석하였다.
공력 소음원의 분류에 대한 Lighthill[3]의 이론 모델에 따르면 음향 파워는 속도의 지수의 비례하여 증가한다고 알려져 있다. 썬루프에서 발생하는 난류소음은 Leadin-edge 소음과 Trailing-edge 소음으로 구분할 수 있다. 디플렉터 전방과 썬루프 개구부 후방에서는 구조물이 유동에 노출되어 Leading-edge 소음이 발생한다. Leading-edge 소음원의 경우 쌍극 타입으로 음향 파워는 Eq. (2)과 같이 속도의 6승에 비례한다.
(2)
디플렉터 후방에서는 구조물을 통과한 유동의 후류에서 Trailing-edge 소음이 발생하며, 이 소음은 4중극 타입으로 음향 파워는 Eq. (3)와 같이 속도의 8승에 비례한다.
(3)
차량 주행 속도(~130 km/h)의 마하수를 고려하였을 때 디플렉터 전방과 썬루프 개구부 후방에서 발생하는 쌍극 타입의 Leading-edge 소음이 난류소음의 주된 원인으로 예상되며, 유속이 감소할수록 소음이 개선될 것을 예상할 수 있다.
따라서 기존 높이에서는 두가지 디플렉터의 난류소음을 비교 예측하기 위해 유동의 유속을 중점적으로 살펴 보았다.
차량에 실제 장착되고 있는 조건인 후방경사형 디플렉터의 기존 높이에서 유선과 유속을 Fig. 10(a)에 나타내었다. 후방경사형에서 메쉬의 후방 경사로 인하여 유동이 상방으로 유도되어 메쉬 상단부로 많이 통과한다. 반대로 전방경사형에서는 Fig. 10(b)와 같이 유동이 하방으로 유도되어 상대적으로 메쉬 하단부 유속이 높게 된다. 이러한 차이로 인하여 전방경사형에서 후방경사형 대비 메쉬 상단부를 통과하는 유동의 유속이 더 낮은 것을 확인할 수 있다. 이러한 유속 차이로 전방경사형 디플렉터가 난류소음에 더 유리할 것으로 예상된다.
기존 높이에서 유속 분포를 확인하기 위해 Fig. 11과 같은 위치에서 차량 절대 높이에 따른 속도 분포를 나타내었다. Fig. 11에서 (a)는 메쉬 통과 전 속도 분포 위치이며, (b)는 메쉬 통과 후 위치를, (c)는 파노라마 썬루프 개구부 전단에서 위치를 나타낸다.

Fig. 12에서 메쉬 통과 전 속도 분포를 보면 후방경사형 디플렉터의 메쉬 상단부(1.22 m) 유속이 전방경사형 대비 더 높은 것을 확인할 수 있다. 전방경사형에서는 상단부보다 하단부 유속이 더 높은 것을 확인할 수 있는데 이는 앞의 유선을 통해 예측한 것과 일치한다.
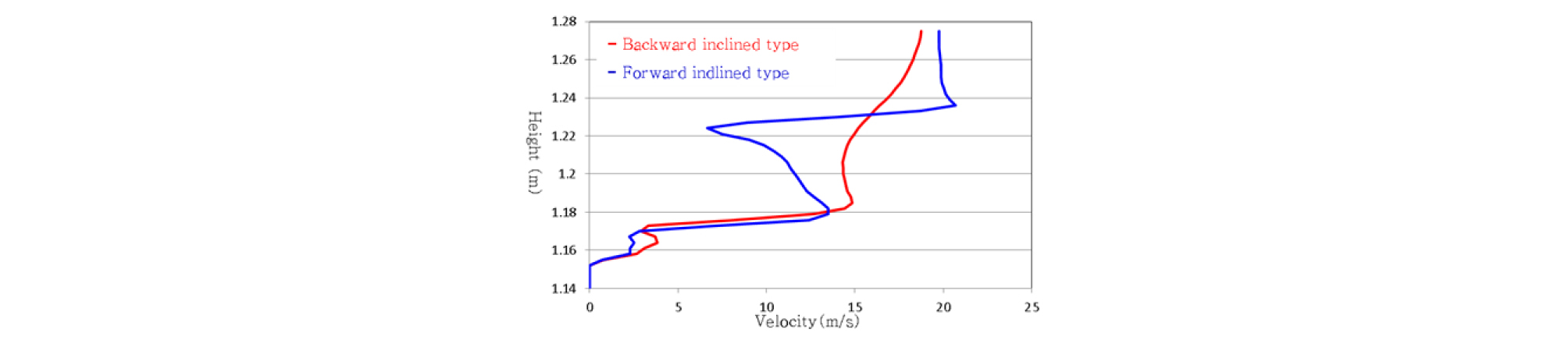
Fig. 13에서 메쉬 통과 후 속도 분포를 보면 전방경사형 디플렉터에서 1/2높이에서와 같이 유속 역전 현상이 발생하지는 않는다. 이로 인하여 전방경사형 디플렉터에서도 속도 분포로 인하여 발생하는 시계방향 회전 성분이 존재한다. 이 성분은 메쉬 통과 후의 Vortex shedding의 회전 방향인 시계 반대 방향과 역방향으로 유동 상승을 약화시킨다. 하지만 전방경사형에서 후방경사형 대비 속도 분포의 상하단부 속도 차이가 더 적게 나타나고 후방경사형 대비 메쉬 통과 후의 반대 방향 회전 성분의 크기가 감소하게 된다.
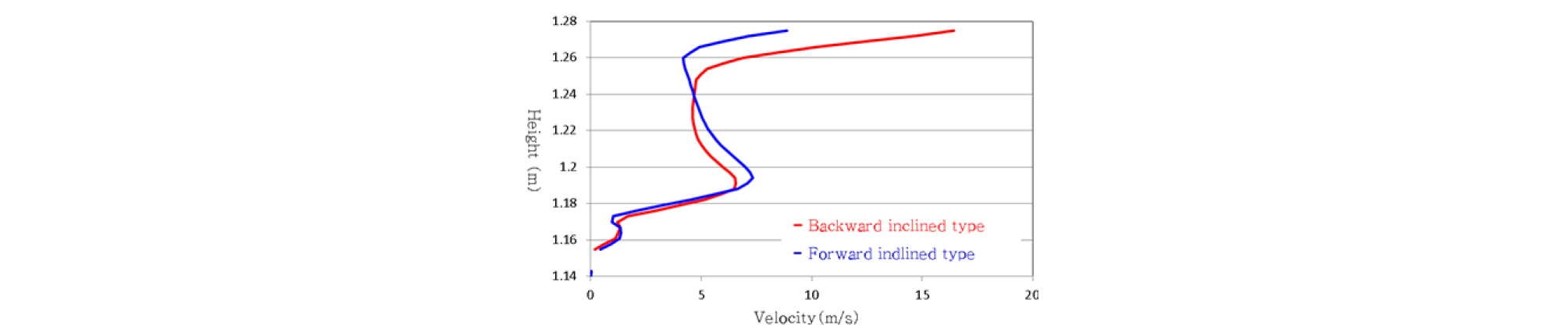
개구부 전단의 속도 분포를 보면 Fig. 14와 같이 1.19 m 이후 두가지 디플렉터 모두 유속 역전 구간이 발생하는 것을 확인할 수 있다. 하지만 전방경사형 디플렉터에서 후방경사형 대비 유속 역전 구간에서 속도 차가 더 큰 것을 확인할 수 있다. 따라서 전방경사형 디플렉터가 후방경사형 대비 유속 역전 구간에서 발생하는 와류에 의한 유동 상승이 더 클 것으로 예상되며 후방의 썬루프 개구부가 유동에 노출되는 것을 더 효과적으로 방지할 수 있을 것으로 보인다. 이러한 유동 상승이 루프 부밍과 썬루프 후방 개구부 난류소음에 미치는 영향을 확인하기 위해 실차 풍동 평가를 수행하였다.
2.1.2 실차 풍동 평가를 통한 바람소리 영향 연구
전방경사형 디플렉터와 후방경사형의 바람소리 성능을비교하기 위해 풍동 평가를 수행하였다. 풍동 평가는 실차 무향 풍동인 HAWT(Hyundai Acoustic Wind Tunnel)에서 당사 준중형 해치백 차량에서 파노라마 썬루프를 연 상태로 수행하였다. 실제 적용 가능한 디플렉터의 높이를 고려하여 기존의 후방경사형 디플렉터와 새로 고안된 전방경사형 디플렉터를 기존 높이, 5 mm 하향, 10 mm 하향, 15 mm 하향한 경우에 대하여 평가를 진행하였다. 평가 시 디플렉터의 높이과 각도는 Table 1과 같다.
Table 1. Deflector height and angle at Hyundai Acoustic Wind Tunnel test.
| Backward inclined | Forward inclined | ||
| Height (H) | Angle (θ) | Height (H) | Angle (θ) |
| 41 mm | -8° | 41 mm | 9° |
| 36 mm | -8° | 36 mm | 10° |
| 31 mm | -8° | 30 mm | 12° |
| 26 mm | -8° | 25 mm | 14° |
먼저 드론 소음을 평가하기 위해 정차상태에서 130 km/h까지 속도를 증가시키면서 실내음의 최고 음압을 측정하였다. 평가 결과 높이를 15 mm 하향한 디플렉터에서 후방경사형과 전방경사형 모두 Fig. 15와 같이 드론 소음이 고객 불만 수준 이하로 발생하였다.
다음으로 Fig. 16과 같이 두가지 디플렉터에서 높이를 5 mm 낮춘 경우에 대하여 130 km/h정속에서 실내음을 측정하고, 기존 높이의 후방경사형과 비교하였다.
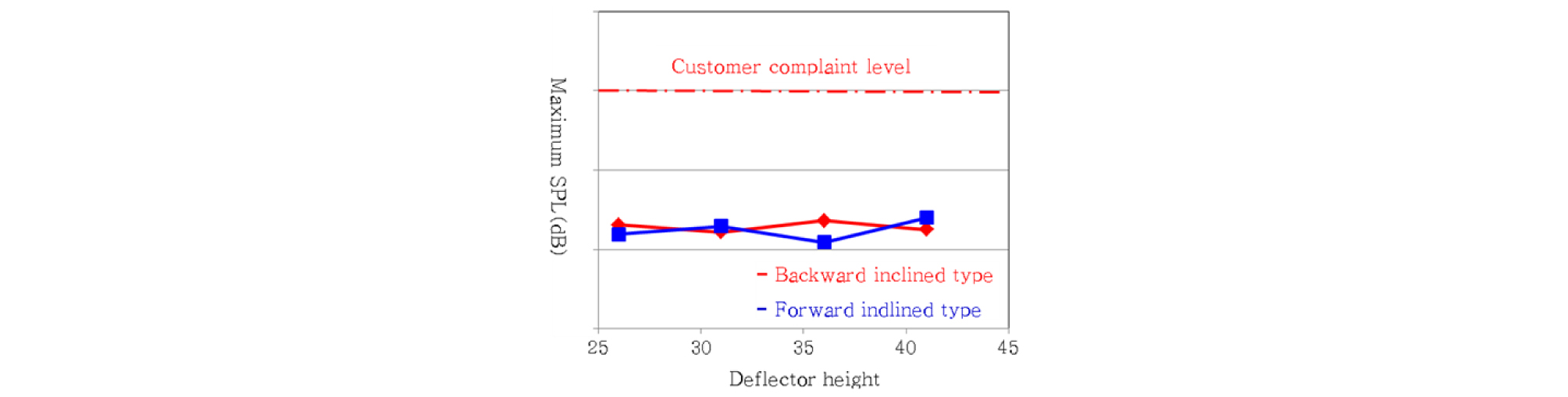

Fig. 16에서 후방경사형 디플렉터의 높이를 41 mm에서 36 mm로 낮춘 경우 저주파 대역의 루프 부밍과 고주파 대역의 난류소음이 악화되는 것을 확인할 수 있다. 따라서 드론 소음이 발생하지 않는다는 이유로 디플렉터 높이를 낮추기는 어렵다.
디플렉터의 높이를 36 mm로 고정한 상태에서 후방경사형 디플렉터(H = 36 mm, θ = -8˚)에서 전방경사형 디플렉터(H = 36 mm, θ = 10˚)로 변경한 경우 루프 부밍은 초기 디플렉터(H = 41 mm, θ = -8˚)대비 1.2 dBA 개선되며, 난류소음은 동등 수준인 것을 Fig. 16에서 확인할 수 있다. 앞에서의 풍동 평가 결과로부터 전방경사형 디플렉터가 후방경사형 디플렉터 대비 드론 소음은 동등 수준인 것을 확인하였고, 전방경사형 디플렉터가 후방경사형 디플렉터 대비 5 mm 낮은 높이에서 루프 부밍은 개선되며 난류소음은 동등 수준임을 확인하였다.
III. 결 론
본 연구에서 파노라마 썬루프에 전방경사형 디플렉터 장착 시 효과를 확인하기 위해 해석과 풍동 평가를 수행하였고, 다음과 같은 결론을 얻었다.
해석 결과 후방경사형 디플렉터보다 전방경사형 디플렉터가 유동을 상향으로 유도하며, 이는 썬루프 구조물과 유동의 상호작용에 의한 소음을 저감할 것으로 기대한다.
파노라마 썬루프에 전방경사형 디플렉터 장착 시, 디플렉터의 높이를 하향할 수 있어 후방경사형 대비 디플렉터 난류소음에 유리하며, 디플렉터 높이 하향으로 인하여 예상되는 상충성능인 드론 소음, 루프 부밍, 난류소음을 모두 만족시킬 수 있어 파노라마 썬루프 차량의 공력소음을 저감할 수 있다.
