

I. 서 론
전 세계 에너지 수요는 산업 및 인구 증가에 따라 지속적으로 증가하고 있으며, 특히 전력 수요는 에너지 부문에서 가장 빠르게 확대되고 있다.[1] 화석연료 기반 전력 생산은 여전히 큰 비중을 차지하지만, 온실가스 감축을 위한 국제적 규제와 에너지 안보 이슈로 인해 재생에너지 비중 확대가 가속되고 있다.[1,2] 또한 Fig. 1과 같이 해양 재생에너지의 경우 상업적 확산을 위해 균등화발전비용(Levelized Cost of Energy, LCOE) 저감이 핵심 과제로 제시되고 있으며, 누적 배치 용량이 증가함에 따라 LCOE가 감소하는 경향이 보고된 바 있다.[2] 한반도는 3면이 해양으로 둘러싸인 지리적 특성으로 다양한 해양 재생에너지 자원을 보유하고 있으며, 특히 서남해안 지역은 비교적 높은 유속 자원이 분포하여 유동에너지 회수 관점에서 유리한 조건을 갖는다.[3] 그러나 실제 적용을 위해서는 저유속 구간에서도 안정적으로 작동하고, 시스템 경제성 확보에 기여할 수 있는 에너지 변환 기술이 요구된다.
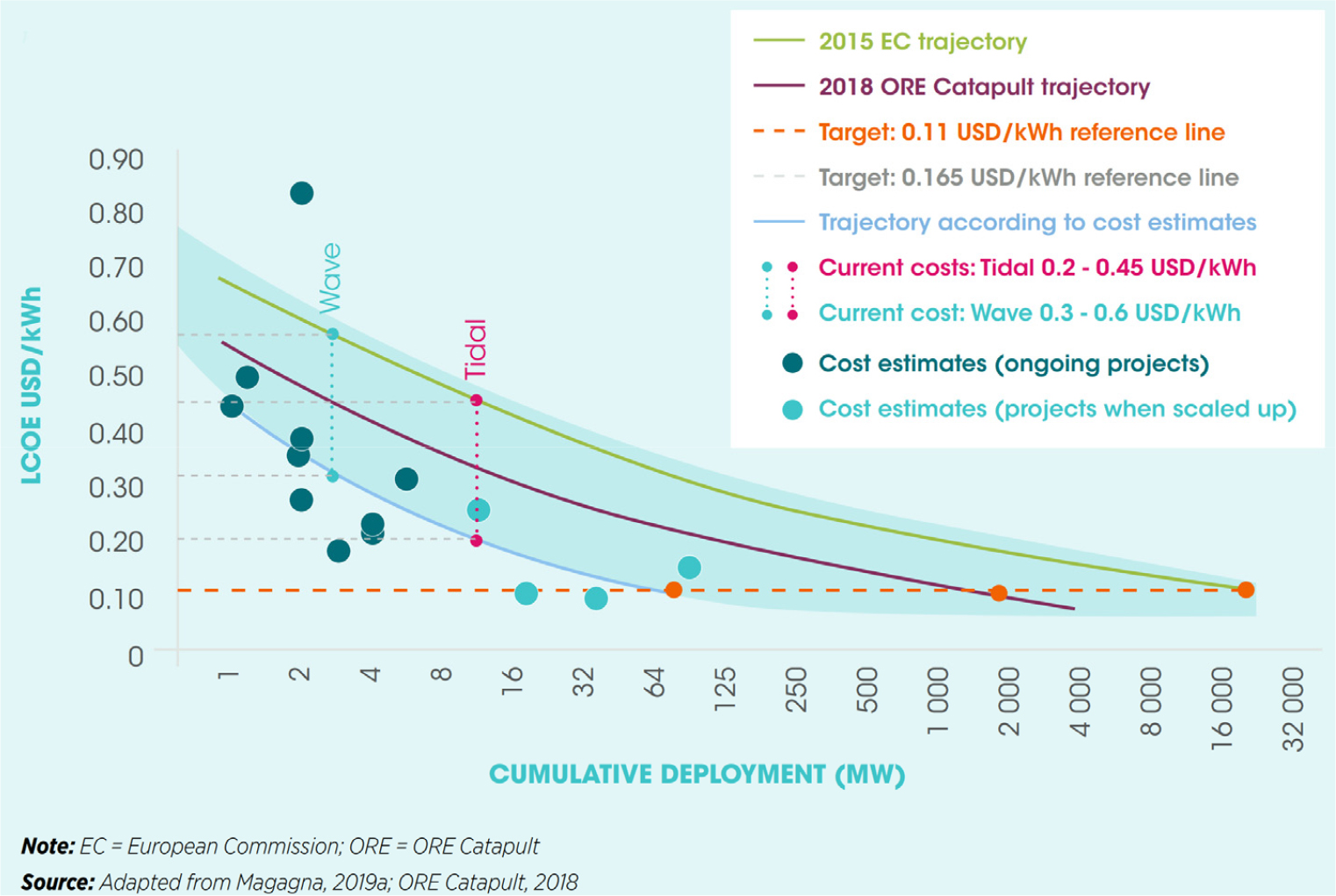
Fig. 1.
(Color available online) Relationship between cumulative installed capacity (MW) and LCOE.[2]
대표적으로 조류 에너지 회수 기술은 주로 수평축 또는 수직축 터빈을 이용한 방식으로 개발되어 왔다. 터빈 기반 발전장치는 비교적 높은 유속 조건에서 안정적인 출력을 확보할 수 있으나, 최소 작동 유속 이하에서는 발전이 어렵고 저유속 구간에서의 에너지 활용 효율이 제한적이다. 실제로 터빈형 조류 발전기의 최소 설계 유속은 약 1.5 m/s 수준으로 보고되고 있으며, 이는 국내 연안의 평균적인 조류 유속 조건을 고려할 때 적용 가능 해역을 제한하는 요인으로 작용한다.[3] 또한 회전 블레이드에 의한 어류 충돌과 고속 회전에 따른 소음 문제는 해양 생태계 및 환경 수용성 측면에서 지속적으로 지적되어 왔다.[4] 이러한 한계로 인해, 저유속 조건에서도 구동 가능하며 환경 영향을 최소화할 수 있는 대안적 에너지 변환 메커니즘에 대한 연구 필요성이 제기되고 있다.
이러한 한계를 극복하기 위한 대안으로, 유동유발진동(Flow-Induced Motion, FIM)을 이용한 에너지 변환 기술이 제안되어 왔다. FIM 기반 에너지 변환은 뭉툭한 물체 주변에서 발생하는 비정상 유체력에 의해 유도되는 진동 운동을 활용하는 방식으로, 와류기인진동(Vortex-Induced Vibration, VIV) 및 galloping과 같은 응답 현상을 통해 에너지를 회수한다. 특히 FIM 방식은 터빈 대비 낮은 유속 조건에서도 구동이 가능하며, 회전 블레이드를 사용하지 않아 환경 수용성 측면에서 장점을 가진다.[4] 이러한 특성으로 인해 FIM 기반 에너지 변환 기술은 저유속 해양 유동 조건에서의 대안적 발전 방식으로 주목받고 있다.
FIM 기반 에너지 변환 기술의 대표적인 개념으로는 Vortex-Induced Vibration for Aquatic Clean Energy (VIVACE)가 제안되어 왔다. VIVACE는 유동에 의해 유도되는 실린더의 횡방향 진동을 이용하여 기계적 에너지를 회수하는 방식으로, VIV 및 galloping 영역을 모두 활용하도록 설계되었다.[5] 선행연구에서는 난류촉진장치(Passive Turbulence Control, PTC)를 실린더 표면에 부착함으로써 응답 영역을 확장하고 출력 성능을 향상시키는 설계 전략이 제시되었다.[6] 또한 단일 실린더뿐만 아니라 다중 실린더 배열에서의 후류 상호작용 및 응답 특성에 대한 실험적 연구가 수행되었다.[4]
한편, 기존 연구의 상당수는 2차원 조건 또는 제한된 실험 환경을 기반으로 수행되어, 실제 3차원 유동에서의 tip effect 및 시스템 구성에 따른 성능 변화에 대한 검증에는 한계가 있다.[7] 이러한 배경에서, 실증 단계에 가까운 프로토타입을 대상으로 시스템 구성 요소가 진동 거동 및 에너지 변환 성능에 미치는 영향을 실험적으로 규명할 필요성이 제기된다.
그러나 기존의 FIM 기반 조류 에너지 변환 연구에서는 주로 특정 설계 변수 또는 개념 검증에 초점을 맞추어 왔으며, 동력전달장치 배치와 같은 시스템 구성 차이가 실린더의 진동 거동 및 에너지 변환 성능에 미치는 영향에 대한 실험적 비교는 충분히 이루어지지 않았다. 특히 동일한 유동 조건에서 서로 다른 구동부 배치가 응답 영역(VIV 및 galloping), 운동 안정성, 그리고 동력·효율 특성에 미치는 영향을 체계적으로 분석한 연구는 제한적이다. 이에 본 연구에서는 저유속 해양 유동 조건을 대상으로 100 W급 이하 FIM 에너지 변환장치 프로토타입을 제작하고, 구동부 배치에 따른 Inner 타입과 Outer 타입의 구조적 특성과 성능을 예인수조 실험을 통해 비교·분석한다. 또한 실린더 거동응답 해석을 통해 타입별 동역학적 특성과 에너지 변환 성능 간의 연관성을 규명하고, 유속 범위 및 목표 출력 조건에 따른 구조 선택 기준을 제시하고자 한다.
II. 실험장치 및 방법
본 연구의 실험 대상은 유동유발진동을 이용하는 100 W급 이하 에너지 변환장치 프로토타입이다. 본 실험 장치는 길이 100 m, 폭 6 m, 깊이 3.5 m 규모의 예인수조에서 시험이 가능하도록 설계된 실험실 규모의 시스템으로, 장치의 외형 크기는 약 1.8 m × 1.8 m이다. 이러한 물리적 규모는 예인수조 시험 조건을 만족하면서도 향후 실해역 적용 시 모듈 단위 확장이 가능하도록 고려하여 설정된 설계 기준을 반영한 것이다. 실험 대상 장치는 구동부 배치에 따라 Inner 타입과 Outer 타입으로 구분되며, 두 타입 모두 실린더의 유동 응답을 직선 운동으로 구속·변환한 뒤 구동부에서 회전 운동 정보를 계측한다. 두 타입은 실린더의 횡방향 진동 운동을 동력전달장치로 전달하는 경로 및 구동부의 배치 구조가 서로 다르다.
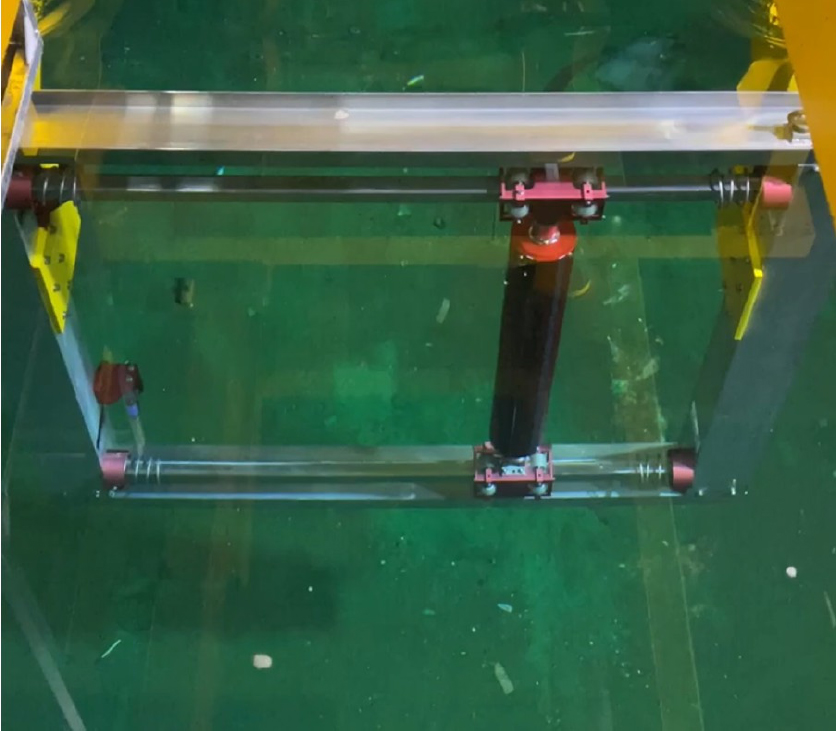
Inner 타입은 타이밍 벨트 기반의 내부 구동 메커니즘을 사용하는 구조로, 전체 장치 구성과 주요 구동 요소는 Fig. 2에 나타내었다. 유동에 의해 실린더에 횡방향 유체력이 작용하면 실린더가 진동하고, 이 운동은 실린더에 결합된 슬라이딩 바디로 전달된다. 슬라이딩 바디는 내부에 통합된 리니어 가이드를 따라 직선 운동으로 구속되며, 이 직선 운동이 타이밍 벨트에 장력을 형성한다.
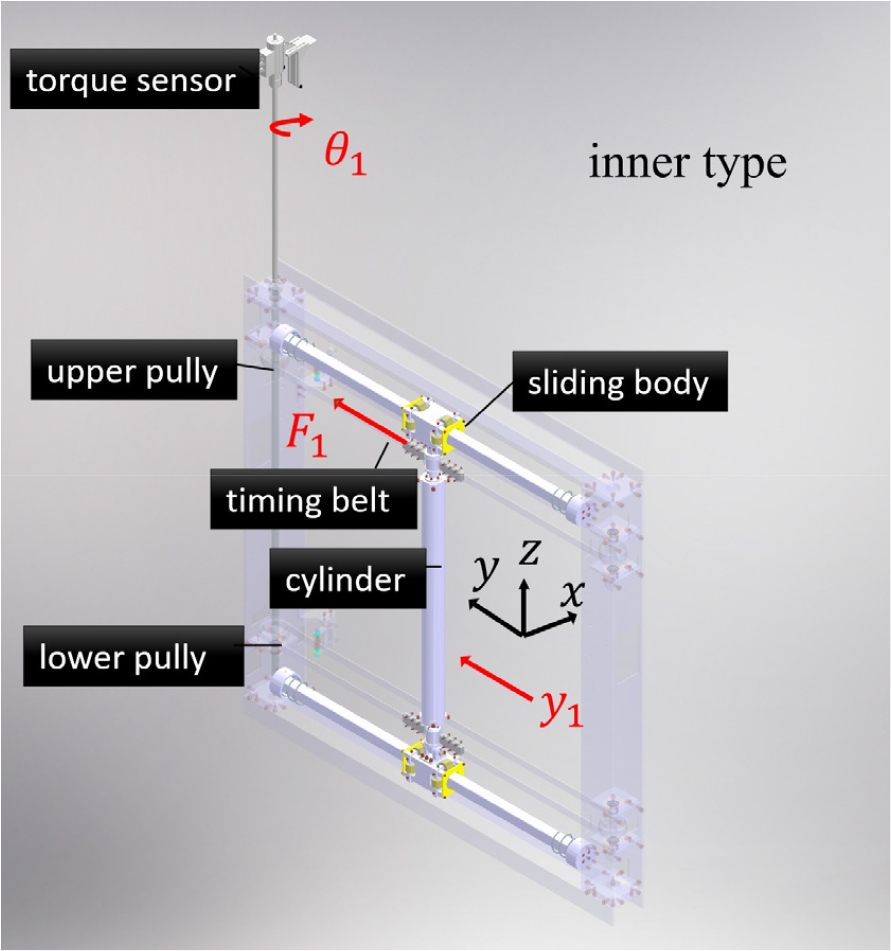
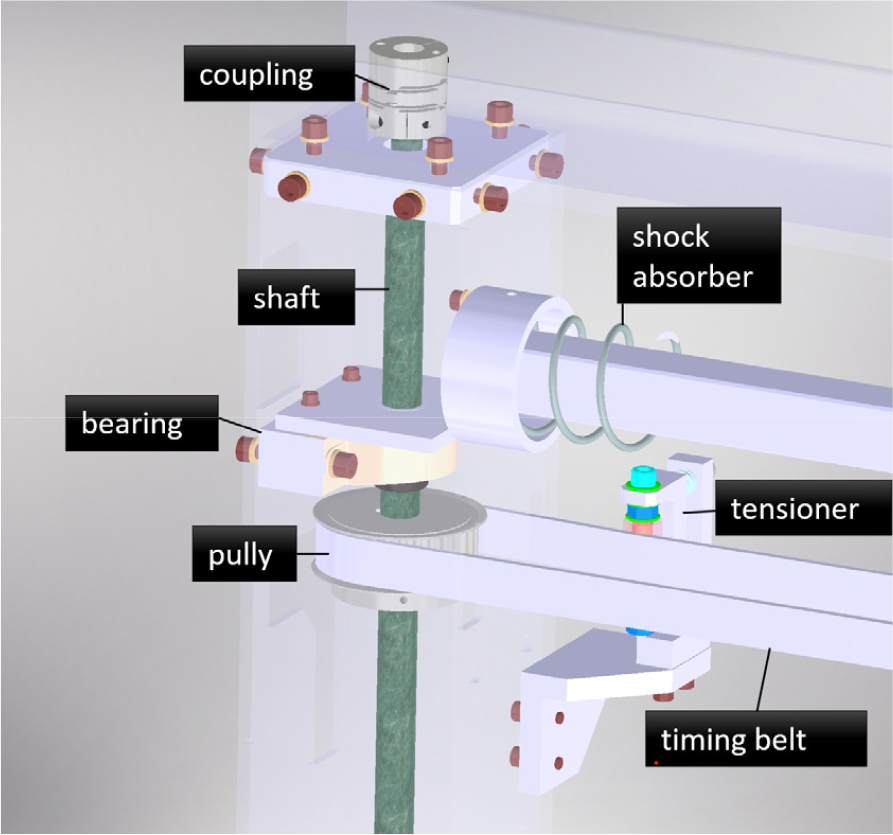
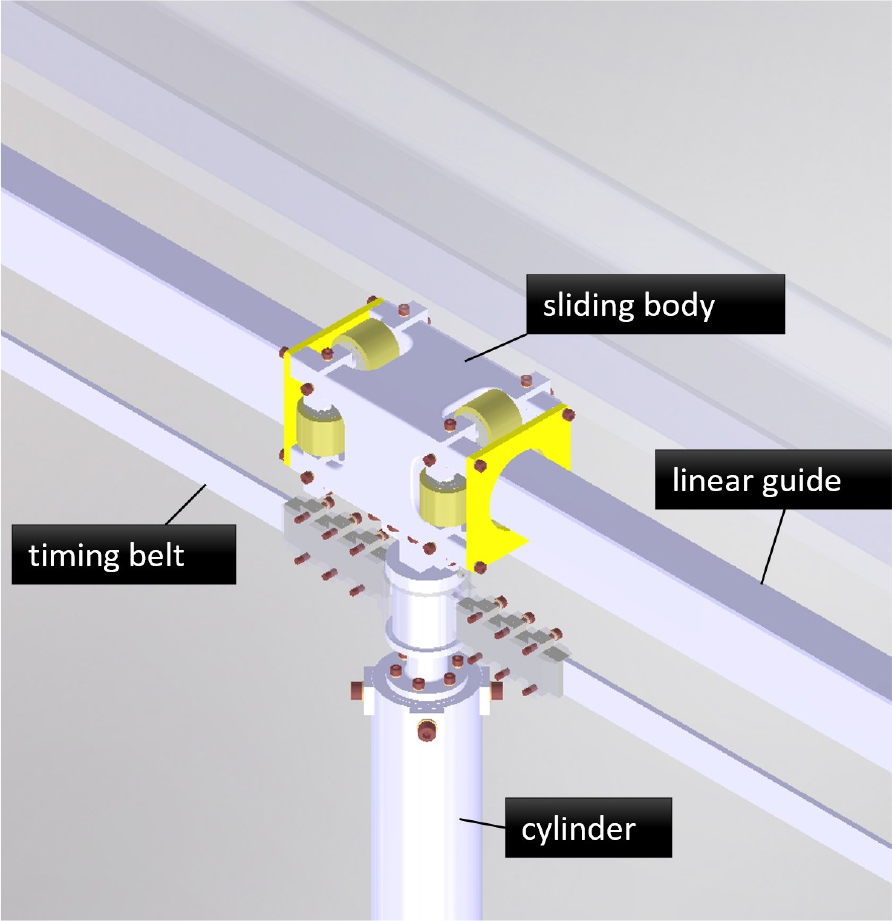
형성된 벨트 장력은 상·하부 풀리를 통해 회전 운동으로 변환되고, 해당 회전은 축을 따라 상부 계측부로 전달된다. 벨트 장력 전달의 안정성을 확보하기 위해 텐셔너가 적용되었으며, galloping 구간에서의 큰 진폭 응답에 의한 충격 방향전환을 위해 스프링이 함께 배치되었다. 회전 운동 정보는 상부에 설치된 로터리 엔코더를 통해 회전각으로 계측되며, 이를 기반으로 실린더 운동의 구동 전달 특성을 정량화하였다. 슬라이딩 바디, 리니어 가이드 및 벨트 연결부의 상세 구조는 Figs. 3과 4에 제시하였다.
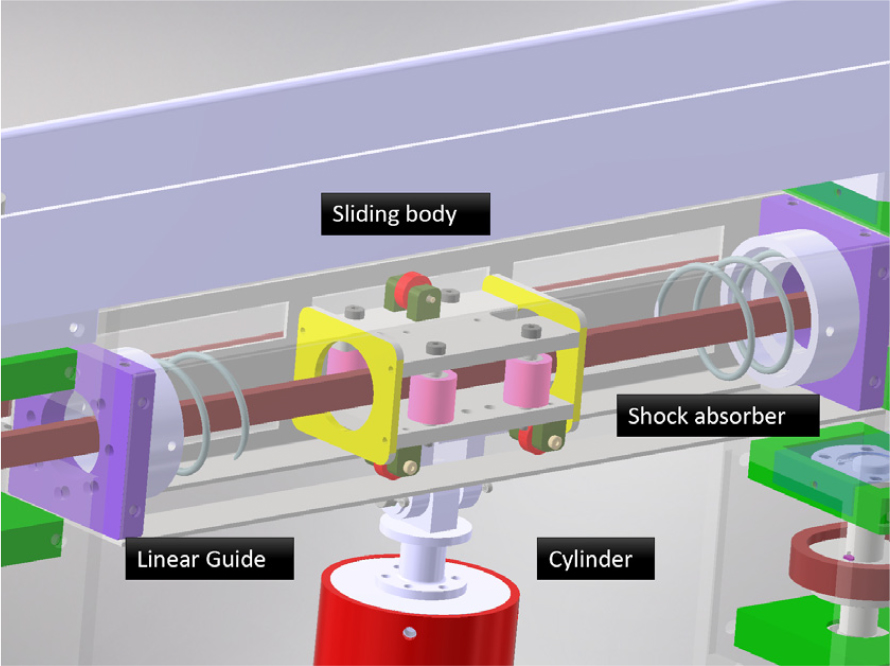
Outer 타입은 체인–스프로켓 기반의 외부 구동 메커니즘을 사용하는 구조로, 전체 장치 배치와 구동 전달 경로는 Fig. 5에 나타내었다. 실린더에 작용하는 유동력으로 인해 발생한 진동 운동은 슬라이딩 바디로 전달되며, 슬라이딩 바디는 외부 프레임에 배치된 리니어 가이드에 의해 4면에서 지지·구속된 상태로 직선 운동을 수행한다. 이러한 외부 가이드 구조는 대진폭 응답 구간에서도 안정적인 운동 경로를 유지하도록 설계되었으며, 해당 구성은 Fig. 6을 통해 확인할 수 있다.
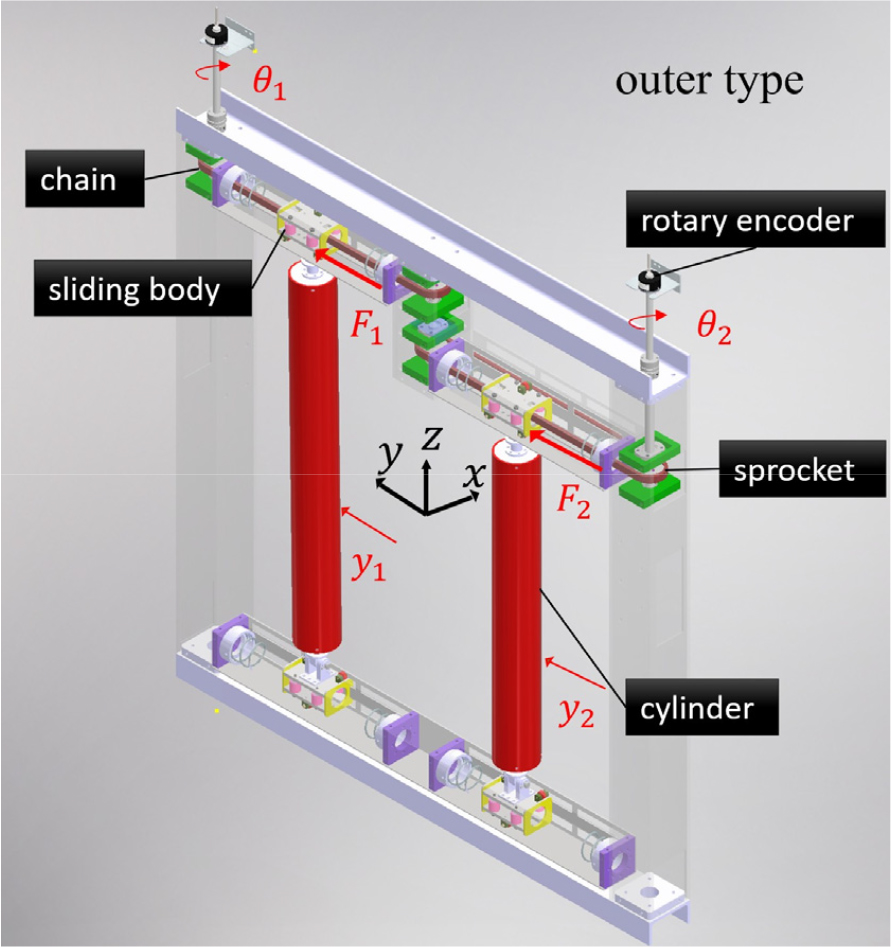
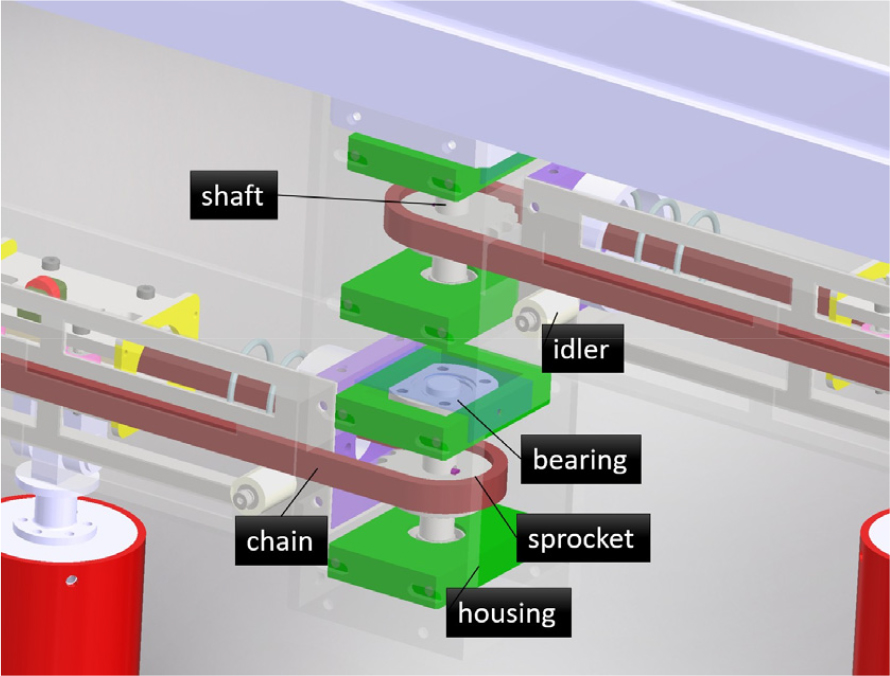
슬라이딩 바디의 직선 운동은 체인에 장력을 형성하고, 이 장력은 스프로켓을 통해 회전 운동으로 변환된다. 체인 구동부에는 샤프트, 베어링 및 하우징이 포함되어 회전 안정성을 확보하였으며, 체인 장력의 처짐 및 변동을 완화하기 위해 아이들러를 적용하였다. 이러한 체인–스프로켓 구동부의 상세 구성은 Fig. 7에 제시하였다.
한편 Outer 타입 장치는 프레임을 두 구간으로 분할하여 서로 다른 종횡비 조건의 실린더를 동일 구조 내에 병렬 배치한 형태로 구성되었다. 이를 통해 동일한 설치 및 유속 조건 하에서 종횡비가 다른 시험 케이스의 운동응답을 비교할 수 있도록 하였다.
Fig. 8과 같이 모든 실린더 표면에는 VIV 및 galloping 응답을 안정적으로 유도하기 위해 PTC가 부착되어 있다. PTC가 부착된 실린더 조건은 Table 1과 같다. PTC의 거칠기에 따른 선행연구 결과를 참고하여 P60 거칠기의 사포 테이프를 사용하였으며, 배치 각도 또한 선행연구에서 제시된 진동 증폭 영역에 해당하는 위치를 참고하여 설정하였다.[8]
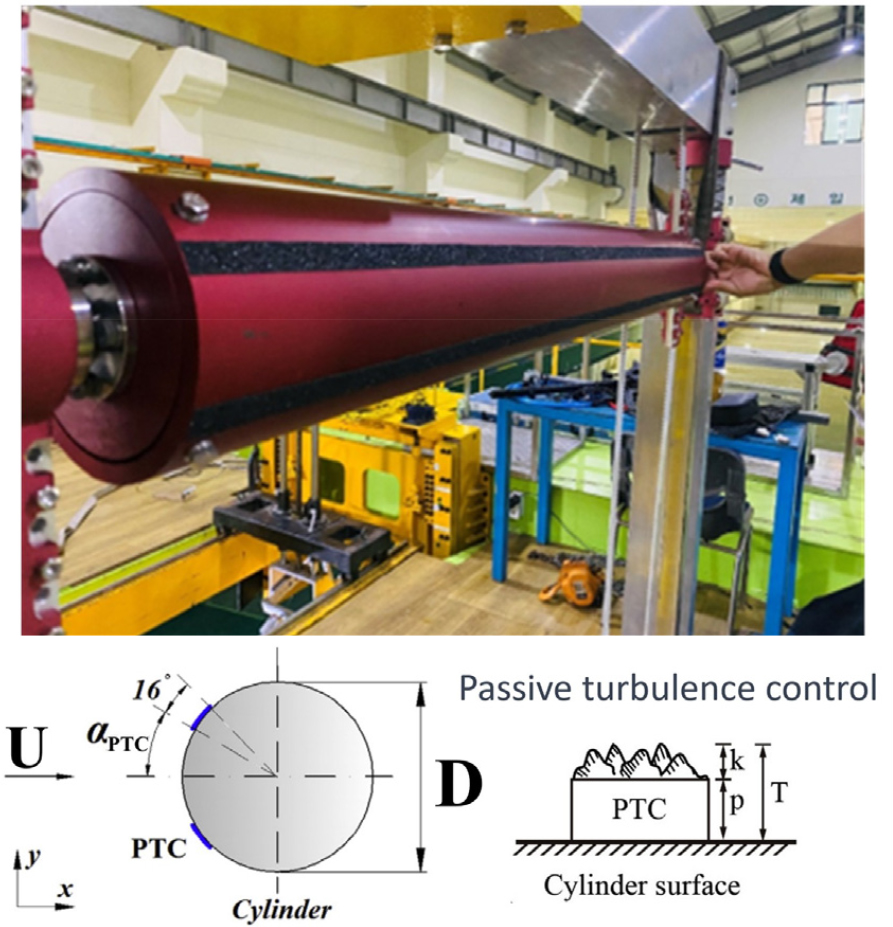
Table 1.
parameters of the passive turbulence control (PTC) & cylinder.
선행연구에 따르면 제한된 유속 및 질량 조건 하에서 종횡비를 약 7에서 20 범위로 조절하는 것이 권장된 바 있다.[9] 본 연구에서는 이러한 선행연구 결과를 바탕으로 예인수조 실험 환경에서의 설치 제약, 목표 유속 범위 및 장치 안정성을 종합적으로 고려하여 두 가지 종횡비 조건을 선정하였다. 또한 선행연구에서 제시된 종횡비 범위를 참고하여 본 실험 장치에서 비교적 높은 발전 성능이 기대되는 범위의 종횡비를 중심으로 실린더 조건을 선정하였다. 실린더 제원에 따른 응답 특성 차이를 고려하여 본 연구에서는 서로 다른 두 가지 종횡비 조건을 적용하였다. 실린더의 제원 및 종횡비는 Table 1과 같다.
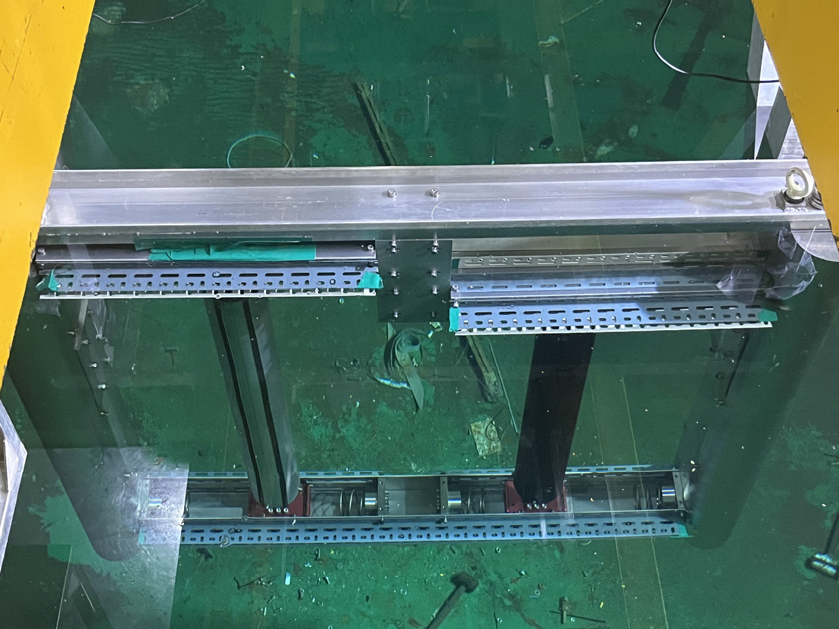
모든 실험은 부산대학교 예인수조에서 수행되었다. Figs. 9, 10과 같이 실험 장치는 수조 중앙부에 설치되었으며, 예인 장치를 이용하여 일정한 상대 유속 조건을 구현하였다. 시험 유속은 단계적으로 변화시키며 수행하였으며, 본 연구에서는 0.75 m/s, 0.85 m/s, 1.00 m/s, 1.25 m/s, 1.50 m/s, 1.75 m/s 및 2.00 m/s의 총 7개 유속 조건에서 실험을 수행하였다. 각 유속조건에서 5회 반복 시험을 수행하였다. 반복 시험의 재현성에 대한 정량적 평가는 진폭 산정 방법은 설명한 이후, 각 시험에서 산정된 평균 진폭과 표준편차를 기준으로 후속 절에서 제시하였다.
예인전차 실험에서는 예인 초기의 가속 구간을 제외하고 등속 구간에서의 응답만을 분석 대상으로 설정하였다. 유속 조건에 따라 측정 시간이 상이하므로, 각 실험에 대해 신호 기록 종료 시점을 기준으로 10 s 구간을 선택하여 평균 진폭 및 기계적 동력을 계산하였다. 실린더의 횡방향 운동응답을 계측하기 위해 변위 센서를 사용하여 시간에 따른 응답 데이터를 취득하였다. 로터리 엔코더를 변위 계측 센서로 사용하였으며, 측정된 회전각도에 스프로켓의 피치반지름을 곱하여 실린더의 변위를 계산하였다. 로터리 엔코더는 Figs. 2와 5에 나타난 바와 같이 동력전달부 상단의 회전부에 고정하여 설치하였다.
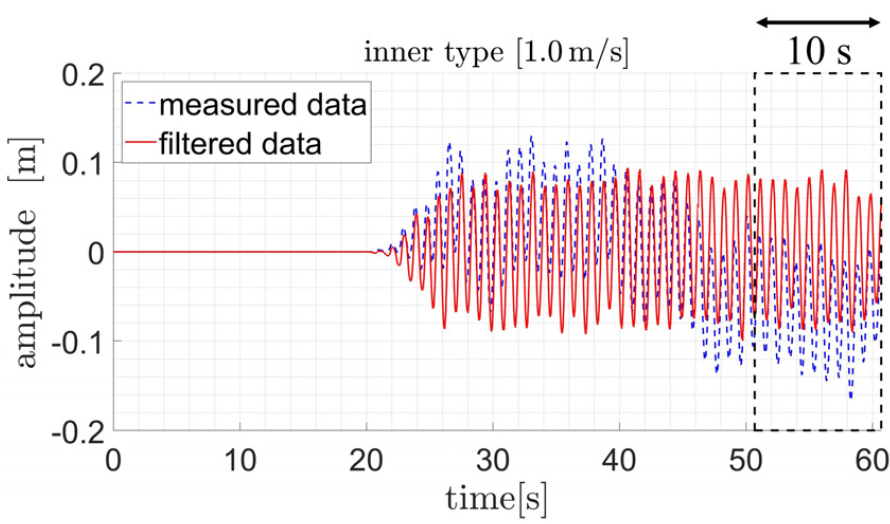
계측된 변위 신호에는 실린더의 주된 유동유발진동 응답과 직접 관련이 없는 고주파 성분이 포함되어 있어, 이를 제거하기 위해 차단주파수 5 Hz의 2차 Butterworth 저역통과 필터를 적용하였다. 여기서 고주파 성분은 5 Hz 이상의 주파수 대역에 해당하는 성분으로, 계측 노이즈 및 예인전차 운행 과정에서 유입될 수 있는 기계적 진동 성분으로 간주하였다. 또한 준정상 상태의 진동 응답을 보다 명확히 추출하기 위해 샘플링 주파수 50 Hz 기준 약 0.5 s 구간의 이동평균 처리를 추가로 적용하였으며, Fig. 11의 붉은색 실선은 이러한 처리 후의 변위 응답을 나타낸다.
본 연구에서는 시스템 감쇠계수의 정량 추정 또는 감쇠 변화에 따른 민감도 분석을 수행하지 않았다. 이는 장치 구성상 감쇠를 독립적으로 계측·분리하여 산정하기 어렵기 때문이다. 따라서 실린더에 작용하는 유체력과 구조적 감쇠력의 합력을 하나의 운동학점 힘 으로 다음과 같이 정의된다.
여기서 는 실린더를 포함한 구동부의 전체 질량, 는 실린더의 가속도이다. 이를 바탕으로 운동에 전달되는 동력 은 Eq. (1)의 과 속도 의 곱과 동력전달부의 회전 관성에 의한 성분을 더하여 다음과 같이 계산하였다.
운동 주기에 따른 평균 동력은 아래와 같이 산정하였다.
여기서 는 회전부의 관성모멘트, 𝛼는 각가속도, 𝜔는 각속도, 는 진동주기, 은 평균 산정에 사용된 주기 수이다. 동력은 운동주기에 맞추어 선정한 구간에 대해 평균값으로 계산하였으며, 동적 응답 해석 및 동력 계산에 사용된 주요 변수는 Table 2에 정리하였다.
Table 2.
Definition of variables used in dynamic response and power calculation.
계측된 변위 신호로부터 진동 진폭, 주기 속도 및 가속도를 산출하고, 이를 기반으로 Eq. (3)의 기계적 동력 을 계산하였다. 모든 계측 데이터는 50 Hz 샘플링 주파수로 취득하였으며, 분석에는 정상 상태 구간의 데이터만을 사용하였다.
시스템 효율 산정을 위해, 산출된 기계적 동력과 비교 기준이 되는 유체 동력 을 정의하였다. 유체 동력은 유속과 수직한 방향에서 실린더가 진동하면서 유체 내를 쓸고 지나가는 유효 투영면적을 기준으로 다음과 같이 계산하였다.
여기서 𝜌는 유체 밀도, 는 유속, 는 실린더 직경, 는 최대 진폭, 은 실린더 길이이다. 또한 실험을 통해 산출된 기계적 동력과 Eq. (4)의 유체 동력을 이용하여 시스템 효율 를 다음과 같이 정의하였다.
본 연구에서는 각 실험 조건에서 산출된 기계적 동력을 풍력발전 이론에서 제시되는 Betz limit(59.26 %)을 적용하여 계산한 이론적 최대 유체 동력으로 정규화함으로써 효율을 평가하였다.[10]
이와 같이 정의된 효율은 유속 조건이 상이한 경우에도 발전 성능을 정량적으로 비교할 수 있는 지표로 활용되며, 이후 결과 분석에서는 동력과 함께 효율을 기준으로 각 실험 조건 및 장치 구성의 성능을 비교하였다.
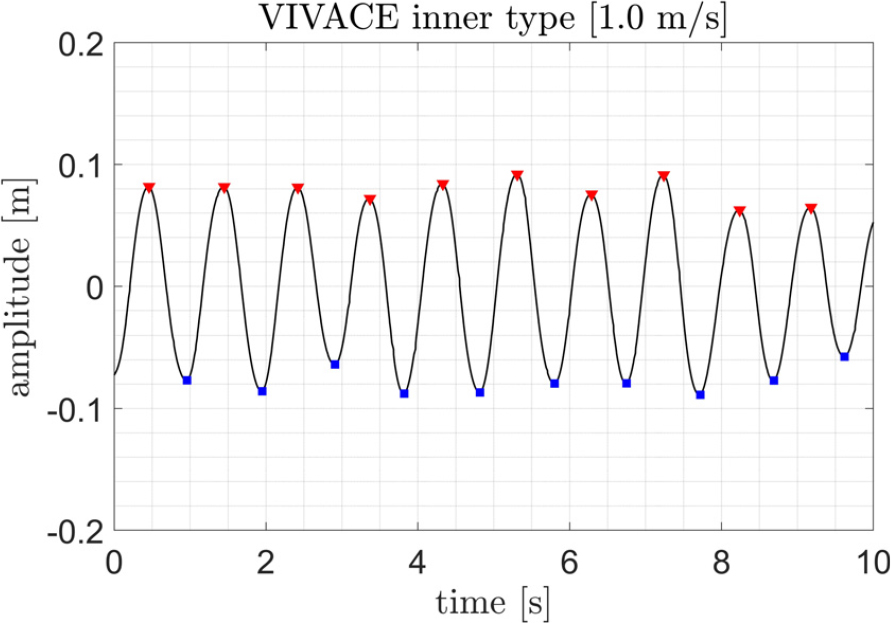
실린더의 유속별 평균 진폭과 효율 계산에 사용되는 최대 진폭을 산정하기 위해, 각 실험 조건에 대해 시간영역 변위 응답으로부터 진폭을 계산하였다. Fig. 12는 진폭 산정에 사용된 대표적인 변위 응답 예시를 나타낸 것이다. 그림에 나타난 바와 같이, 필터링된 변위 신호에서 국부 최대값과 최소값을 기준으로 진폭을 정의하였으며, 이로부터 각 케이스에 대한 평균 진폭과 최대 진폭을 각각 산출하였다. 산출된 최대 진폭은 이후 유체 동력 및 효율 계산을 위한 기준값으로 사용되었다.
또한, 반복시험 결과의 재현성을 정량적으로 비교하기 위해 각 실험 조건에서 산정된 평균 진폭과 표준편차를 바탕으로 Fig. 13에 결과를 도시하였다. 대부분의 조건에서는 반복시험 간 변동이 크지 않게 나타났으나, Inner type의 고유속 조건에서는 상대적으로 큰 편차가 관찰되었다. 이는 동력전달계가 유동에 직접 노출되는 구조적 특성과 관련된 것으로 판단된다.
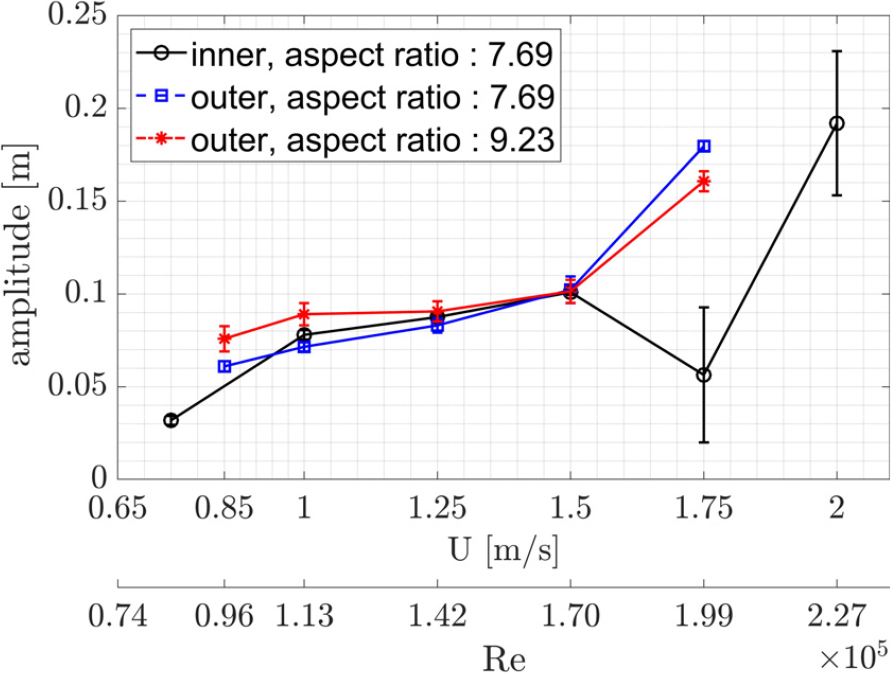
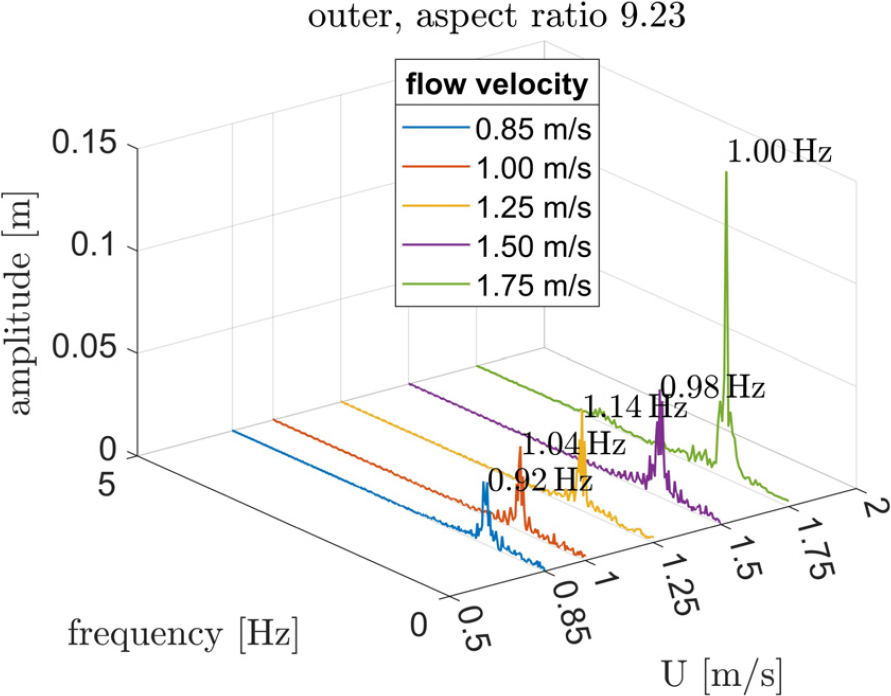
Fig. 14와 같이 실린더의 응답 해석에 필요한 지배 주파수를 도출하기 위해 각 실험 조건에 대해 고속 푸리에 변환(Fast Fourier Transform, FFT)을 이용한 주파수 영역 해석을 수행하였다. 이를 통해 진폭이 가장 크게 나타나는 주파수 성분을 지배 주파수로 정의하고, 해당 주파수를 실린더의 대표적인 진동 응답 특성으로 활용하였다. 주파수 해상도를 확보하기 위해 동일 조건에서 수행된 반복 시험의 변위 신호를 연속 데이터로 구성하여 FFT 분석을 수행하였다.
III. 실험 결과
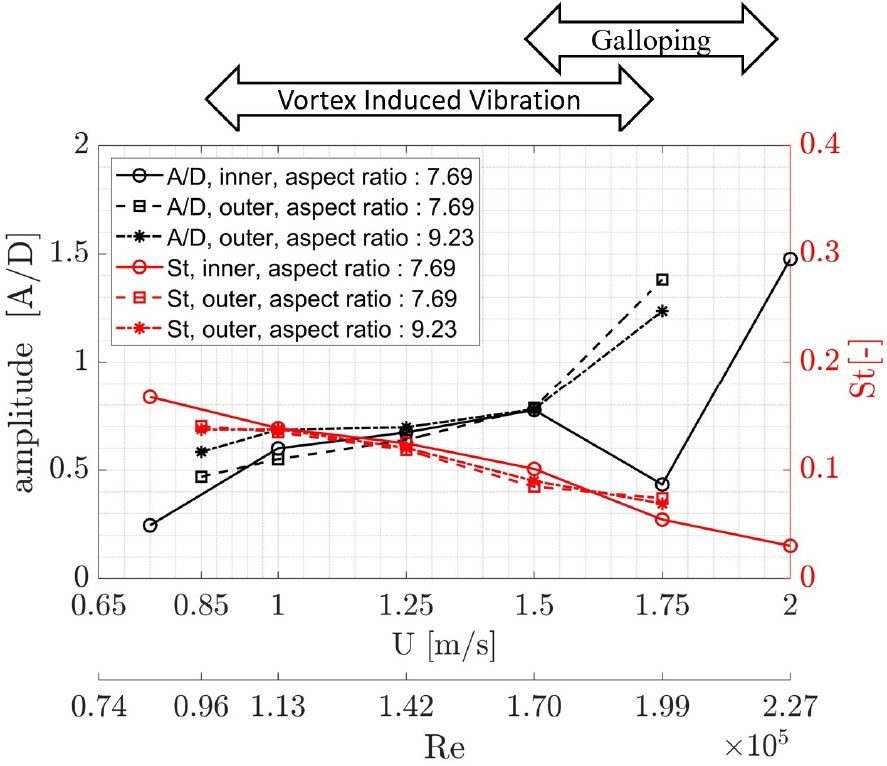
기존 연구에 따르면, 유속 변화에 따른 실린더의 운동 응답은 진폭과 주파수로 표현되며, 유속 증가에 따라 VIV의 initial branch와 upper branch를 거쳐 천이구간을 지나 galloping 구간으로 전이되는 전형적인 FIM 거동을 나타내는 것으로 알려져 있다.[11] 이러한 응답 특성을 바탕으로, Fig. 15에는 유속 변화에 따른 본 연구의 실린더 무차원 진폭(Amplitude/Diameter, A/D)과 주파수 특성을 종횡비 및 설치 타입별로 정리하여 나타내었다. 이때 A는 최대진폭()가 아니라, 일정 시간 구간에서 계측된 변위 신호로부터 산출된 평균 진폭을 의미한다. 그리고 주파수 특성은 지배 주파수 를 기반으로 계산한 Strouhal 수()를 의미한다. 계산 수식은 다음과 같다.
종횡비에 따른 진폭 특성을 비교한 결과, 두 종횡비 조건 간 진폭 차이는 크지 않으며 전반적으로 유사한 수준을 보였다. 반면, 천이 구간 및 galloping 영역에서는 종횡비에 따라 응답 거동의 차이가 보다 뚜렷하게 나타났다. 특히 1.75 m/s 조건에서 종횡비 9.23 실린더는 진동 진폭의 일시적 감소와 진동 중심의 편향이 관찰된 반면, 종횡비 7.69 실린더는 비교적 규칙적인 진동 응답을 유지하였다. 이러한 차이는 종횡비 변화에 따라 VIV–galloping 천이 특성이 상이하게 형성되었기 때문으로 해석된다.
진폭과 을 종합적으로 비교·분석한 결과, 본 연구에서 관찰된 FIM 응답은 Table 3과 같이 네 개의 유속 구간으로 구분되는 경향을 보인다. 먼저, 0.75 m/s – 1.00 m/s 구간에서는 vortex shedding에 의해 실린더의 진동이 발생하기 시작하였으며, 전반적으로 낮은 진폭을 보인다. 일반적으로 VIV 응답에서 는 약 0.2 부근의 값을 갖는 것으로 알려져 있으나, 본 실험에서는 전반적으로 이보다 낮은 값을 보이며 유속 증가에 따라 가 점진적으로 감소하는 경향이 관찰되었다. 유속이 증가함에 따라 1.00 m/s – 1.50 m/s 구간에서는 일부 조건에서 진폭 변화의 편차가 나타나지만 전반적으로 진폭이 증가하는 경향을 확인할 수 있다. 이후 1.50 m/s – 1.75 m/s 구간에서는 일부 조건에서 진폭 감소가 관찰되기도 하나 전체적으로는 다시 증가하는 경향이 나타나며, 동시에 가 지속적으로 감소하는 특성이 확인된다. 일반적으로 galloping 응답에서는 유속 증가에 따라 가 감소하는 경향이 보고된 바 있으며, 이러한 의 변화 경향과 진폭 특성을 종합적으로 고려할 때 본 연구에서는 1.50 m/s – 1.75 m/s 구간을 VIV 응답에서 galloping 거동으로 전이되는 천이 구간으로 해석할 수 있다. 특히 1.75 m/s 조건에서는 진폭과 운동 속도가 최대값을 보이는 동시에 vortex shedding 주파수 저하에 따른 가 관찰되었다. 이러한 응답 특성을 고려할 때, 1.75 m/s – 2.00 m/s 구간에서는 galloping 응답이 나타나는 경향을 확인할 수 있다.
Table 3.
response regime classification.
| flow velocity [m/s] | FIM regime |
| 0.75 ~ 1.00 | VIV Initial branch |
| 1.00 ~ 1.50 | VIV Upper branch |
| 1.50 ~ 1.75 | Transition |
| 1.75 ~ 2.00 | galloping |
한편, 설치 타입에 따른 진폭 및 주파수 특성을 비교한 결과, 두 설치 타입 간 응답 특성은 전반적으로 유사한 경향을 보였다. 따라서 본 연구에서 관찰된 운동 응답의 차이는 설치 타입보다는 종횡비에 따른 영향이 상대적으로 더 크게 나타나는 것으로 판단된다.
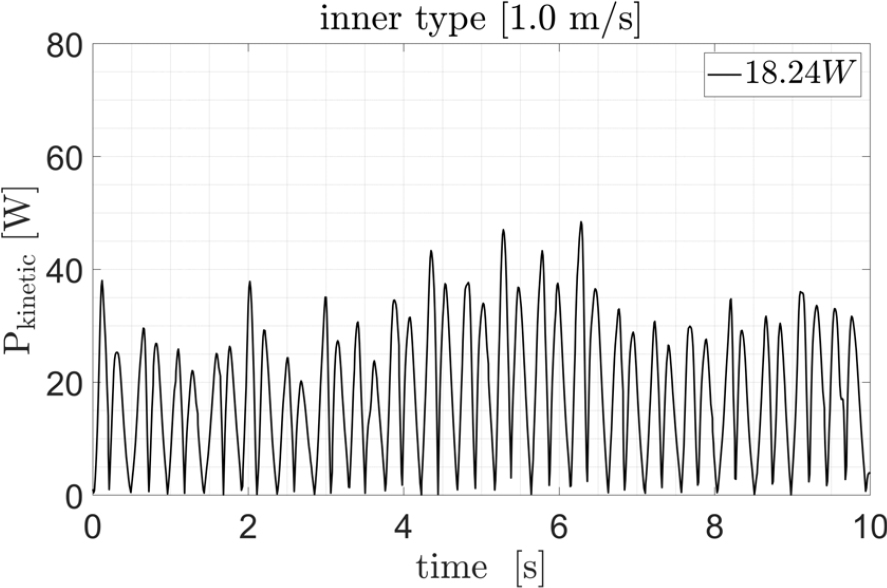
Fig. 16은 유속별 시간에 따른 동력 변화의 예시를 나타내며, Figs. 17 및 18은 설치 타입과 종횡비에 따라 산출된 평균 동력과 효율을 각각 제시한다. 이러한 결과를 바탕으로 종횡비에 따른 동력 및 효율 특성을 비교·분석하였다.
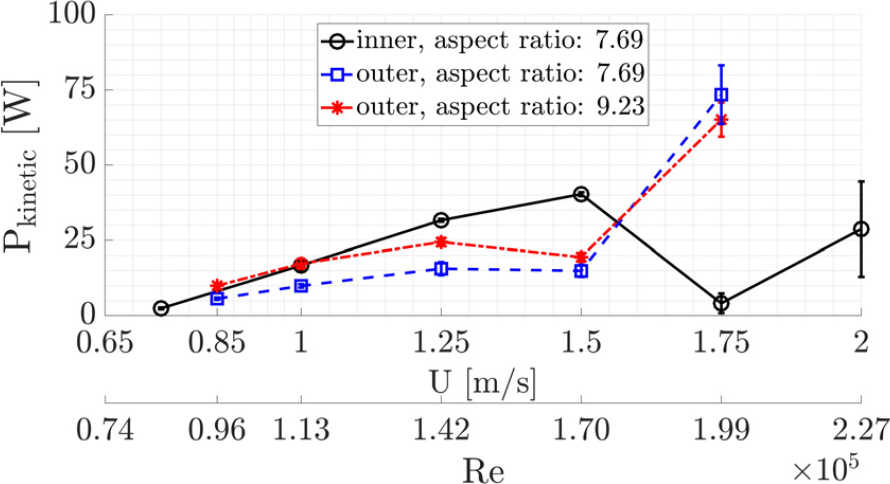
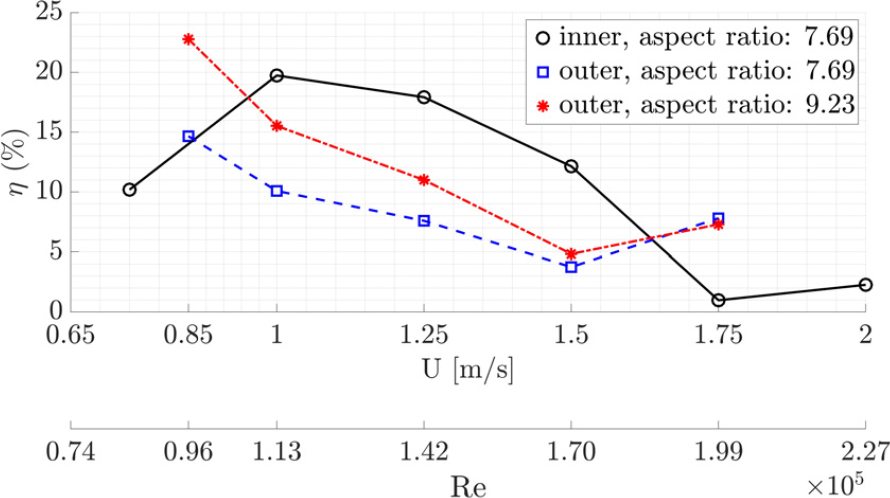
Outer type 조건에서 본 연구에서 비교된 두 실린더 조건을 기준으로 종횡비에 따른 영향을 살펴보면, 0.85 m/s – 1.50 m/s의 유속 범위(VIV 영역)에서 유체력이 작용하는 유효 길이가 더 긴 종횡비 9.23 실린더가 전반적으로 더 큰 평균 동력과 더 높은 효율을 동시에 나타낸다. 특히 0.85 m/s – 1.00 m/s의 상대적으로 낮은 유속 조건에서는 종횡비 9.23 실린더의 평균 동력이 종횡비 7.69 실린더에 비해 약 1.7배 – 1.8배 높게 나타났으며, 1.25 m/s – 1.50 m/s 구간에서도 약 1.3배 – 1.4배 수준의 증가가 확인되었다. 이러한 경향은 동일한 직경 조건에서 실린더 길이 증가에 따라 유체력이 작용하는 유효 면적이 확대되기 때문으로 해석할 수 있다.
100 W급 이하 발전장치의 설계 유속 범위가 0.85 m/s – 1.25 m/s임을 고려할 경우, 본 연구에서 비교된 두 실린더 조건에서는 동일한 직경을 유지한 상태에서 실린더 길이를 약 1.2배 증가시키는 것만으로 최대 약 1.8배 수준의 동력 향상과 함께 효율 개선이 가능함을 시사한다. 이는 본 장비의 운용 조건에서 실린더 길이 증가가 발전 성능에 영향을 미치는 설계 인자 중 하나임을 시사한다. 다만 본 연구에서는 동일한 직경 조건에서 두 가지 실린더 길이만을 비교하였기 때문에 종횡비 변화에 따른 일반적인 경향을 도출하는 데에는 한계가 있으며, 향후 직경과 길이를 독립적으로 변화시킨 추가 연구가 필요하다.
반면, 1.75 m/s 조건에서는 종횡비 7.69 실린더의 평균 동력이 더 크게 나타났다. 이러한 차이는 종횡비 차이에 따라 VIV 및 galloping 응답 영역의 형성이 상이하게 나타나기 때문으로 판단된다.
Inner type은 저유속 영역에서 상대적으로 큰 진폭과 높은 발전 동력을 나타낸다. 그러나 특정 유속 구간에서 진폭 및 동력이 급격히 감소하는 경향이 관찰되었다. 이는 동력전달계가 유동에 직접 노출된 구조적 특성으로 인해, 유동 하중이 동력전달부에 직접 작용하면서 의도하지 않은 과도한 텐션이 발생했기 때문인 것으로 판단된다.
반면, outer type은 동력전달부가 4면 가이드 구조로 보호되어 있어 유동의 직접적인 영향을 받지 않는 장점을 가진다. 다만, 이러한 구조적 구성으로 인해 구조적 감쇠가 상대적으로 크게 작용하는 것은 불가피하며, 이로 인해 저유속 구간에서는 inner type에 비해 다소 낮은 진폭 및 발전 동력을 보인다.
그러나 galloping 구간으로 판단되는 1.75 m/s 이상의 유속 영역에서는, 동력전달부가 유동에 직접 노출되지 않는 outer type의 구조적 특성이 오히려 유리하게 작용하여 inner type 대비 더 큰 진폭과 높은 동력 특성을 나타낸다.
이러한 결과를 종합해 볼 때, 목표 유속 구간에서 안정적이고 충분한 성능을 확보하기 위해서는, 구조적 감쇠를 최소화함과 동시에 동력전달부가 유동에 직접 노출되지 않는 구조 형상이 최적의 설계 방향으로 판단된다.
IV. 결 론
본 연구는 저유속 조류 조건에서 유동유발진동을 이용하는 100 W급 이하 에너지 변환장치 프로토타입을 대상으로, 구동부 배치와 실린더 종횡비 차이가 발전 성능과 운동 안정성에 미치는 영향을 예인수조 실험으로 비교·분석하였다. 유속 증가에 따라 VIV 응답에서 천이 구간을 거쳐 galloping 영역으로 전이되는 전형적인 FIM 거동이 관찰되었으며, 장치의 설계 유속 범위에서는 VIV 지배 구간에서 안정적인 운동 특성이 확보됨을 확인하였다.
예인수조 실험을 통해 구동부 배치와 종횡비 차이가 FIM 기반 100 W급 이하 에너지 변환장치의 출력·효율 및 운동 안정성에 미치는 영향을 비교하였다. 설계 유속 범위에서는 VIV 응답이 지배적이었고, VIV 영역에서 종횡비 9.23 조건이 평균 동력과 효율 측면에서 전반적으로 유리한 경향을 보였다. 이는 동일 직경 조건에서 종횡비가 큰 실린더가 유동이 작용하는 유효 길이/면적을 증가시켜 VIV 영역에서 출력 및 효율 향상에 유리함을 시사한다. Inner 타입은 상대적으로 저유속에서 높은 진폭·동력을 나타냈으나 동력전달부의 유동 직접 노출로 특정 유속에서 성능 급감이 관찰되었고, Outer 타입은 저유속에서 감쇠 증가로 불리하지만 galloping 구간에서 전달부 비노출 구조의 이점으로 더 높은 출력이 확인되었다. 따라서 목표 유속 구간에서 안정적 성능을 확보하기 위해서는 구조적 감쇠 저감과 동력전달부 비노출을 동시에 만족하는 배치가 유리하다.
하지만 본 연구는 감쇠계수의 정량 추정 및 유체력–구조 감쇠의 분리 평가가 제한되었다는 한계를 가지며, 향후에는 실린더 병렬 배치를 통한 간섭 효과 및 배열 최적화 기반의 총 동력 최대화 연구가 필요하다.
