

I. 서 론
II. 이론적 배경
2.1 다이아프램의 비선형 기계 모델
2.2 비선형 강성
III. 해석 방법
3.1 유한 요소 모델
3.2 집중 매개변수 모델
IV. 실험 결과
4.1 정적 FD 곡선 측정
4.2 동적 FD 곡선 측정
4.3 아마추어 중심 속도 측정
V. 결 론
I. 서 론
자동차용 경음기는 차량 주변의 보행자 및 운전자에게 위험 상황을 즉각적으로 전달하기 위해 필수적으로 장착되는 장치이며, 유럽 규제에서는 특정 주파수 대역에서 요구되는 최소 음압을 규정하고 있다.[1] 특히, 최근 전기 및 하이브리드 차량의 보급 확대와 더불어 차량이 저속 주행 시 매우 조용해지면서 경고음의 필요성이 더욱 대두되고 있다.[2,3]
차량용 경음기로 사용되는 쉘 혼의 구조는 Fig. 1과 같고, 각 세부 부품들은 Table 1과 같이 구성된다. 쉘 혼은 12 V ~ 13 V의 전압 구동에 따라 코일의 중간에 위치한 폴이 자화되어 전자기력으로 아마추어를 끌어당긴다. 이 때, 아마추어와 연결된 다이어프램도 함께 아래 방향으로 잡아당겨진다. 다이어프램이 점 간극(point gap) 이상으로 움직이면, 전류가 차단되고, 스위치 접점이 개폐되면서 기계적 진동이 생성된다.[4] 음향부에 해당하는 쉘은 다이어프램과 매질 사이의 음향 임피던스를 더욱 잘 매칭시켜주므로 특정 주파수에서의 음압이 공기 중으로 잘 방사될 수 있도록 증폭시켜준다.
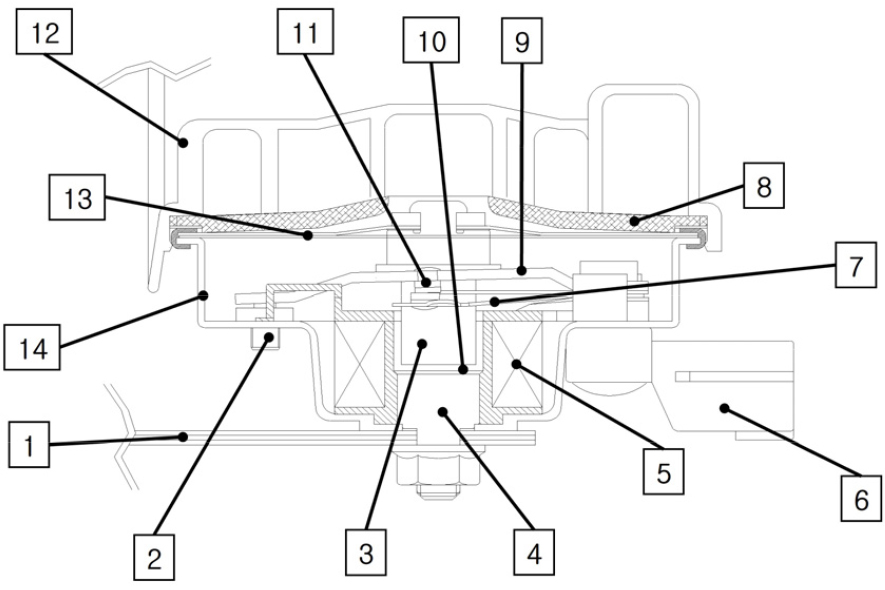
Table 1.
Element of the mechanical electric horn.
| No. | Element | No. | Element |
| 1 | Holder | 8 | Shell cover |
| 2 | Wrench bolt | 9 | Stand |
| 3 | Armature | 10 | Air gap |
| 4 | Pole | 11 | Point gap |
| 5 | Coil | 12 | Shell |
| 6 | Connector | 13 | Diaphragm |
| 7 | Spring | 14 | Body |
자동차용 쉘 혼의 거동은 전자기 구동, 기계 진동, 음향 방사로 이루어진 다중물리 시스템이므로 이를 통합적으로 다루려는 연구가 지속적으로 수행되어 왔다. 초기 연구에서는 쉘 혼을 1차원 단순 진동 모델로 근사한 시도가 있었으며,[5] Finite Element Method(FEM)과 Electrical Circuit Model(ECM)을 결합하여 매개 변수에 따른 작동 기본 주파수의 영향을 분석한 연구도 보고되었다.[6] 하지만, 두 연구에서는 수치 해석 결과와 실험 응답을 직접 비교하여 모델의 타당성을 검증하지 않았다는 한계를 지닌다. Mede et al.[4]는 자동차용 경음기의 전기–기계 요소들을 수학적으로 모델링하여 구동 원리를 밝혔고, 입력 전압과 작동 기본 주파수 간의 관계를 이론적, 실험적으로 입증했다. 하지만, 해당 논문은 쉘 혼이 아닌 디스크 혼에 초점을 맞추어져 있었다.
최근에는 음향부인 쉘 형상에 대한 관심도 증가하였다. Bonfiglio와 Pompoli[7]와 Lee et al.[8]는 쉘 혼의 전자기부와 기계부를 고정시킨 상태에서 음향부인 혼을 설계하여 작동 주파수와 주파수 응답이 어떻게 변화하는지를 이론적, 실험적으로 살펴보았다. 그리고 Kang et al.[9]은 쉘 혼의 음향부에 대해 Boundary Element Method(BEM)를 활용하여 작동 주파수와 파라미터(쉘의 길이, 혼 입구의 너비, 혼 출구의 너비) 간의 상관 관계를 조사하였다. 하지만, 작동 주파수와 Sound Pressure Level(SPL)의 관계를 시뮬레이션했을 뿐 전자기–기계–음향이 결합된 통합 모델을 제시하지 않았으며, 특히 진동부에서의 다이아프램 비선형 강성이 고려되지 않았다.
유럽 규격에 따르면,[1] 승용차를 기준으로 1.8 ~ 3.55 kHz 범위의 주파수에서 105 dBA 이상의 음압을 충족시켜야 되며, 이 대역은 기본 주파수뿐만 아니라 기본주파수의 배음에 해당하는 고주파 성분이 중요한 비중을 차지한다. 하지만, 기존의 연구들은 기본 주파수에 한정하여 모델링을 진행했다. 쉘 혼의 다이아프램은 구동 시 수백 μm에서 1 mm의 변위로 진동하므로 판의 표면이 늘어나면서 추가적인 인장력이 발생한다. 이러한 기하학적 비선형성은 판의 강성을 증가시키며, 얇은 평판에서 큰 처짐을 묘사하는 Föppl-von Kármán 방정식을 통해 제시되는 대표적인 현상이다.[10] 또한 Duffing 방정식은 강성의 변화를 비선형 항으로 표현함으로써 큰 진폭의 진동 시 고유진동수의 증가를 정성적으로 설명할 수 있다.[11]
Mo와 Cha는[5] 쉘 혼의 다이아프램을 단순 진동 모델로 근사했고, Guillaume Lemaitre는 다이아프램을 기계적 컴플라이언스와 연계된 단일 질량으로 모델링했으며,[12] Mede는 압축과 인장에서 발생하는 강성이 다른 점을 반영했으나,[4] 여전히 쉘 혼의 비선형 강성에 대한 논의와 연구는 진행된 바 없다. 본 연구에서는 이러한 비선형 강성의 존재를 FEM 정적 해석과 Force-Displacement(FD) 곡선 측정을 통해 확인하고, 이를 기반으로 Lumped Parameter Model(LPM)에 비선형 강성을 포함하도록 모델을 개선하고자 한다.
II. 이론적 배경
2.1 다이아프램의 비선형 기계 모델
Marescotti et al.[13]은 쉘 혼의 전자기–기계–음향 모델을 제안하면서 다이아프램을 선형 스프링으로 단순화하여 적용하였으며, Mede et al.[4]는 음향 하중을 고려하지 않은 전자기–기계 모델에서 다이아프램 강성을 압축 영역과 인장 영역으로 구분한 선형 모델로 표현했다. 본 논문에서는 Eqs. (1), (2)에서 제시된 미분방정식을 기반으로 쉘 혼의 전자기–기계–음향 거동을 기술한다.
여기서 , , , ,, , , , , , 는 코일에 흐르는 전류[A], 코일의 저항[𝛺], 코일의 인덕턴스[H], 시간[s], 코일에 흐르는 전압[V], 아마추어와 다이아프램의 무게[kg], 다이아프램의 변위[m], 다이아프램의 감쇠 계수[kg/s], 다이아프램의 강성[N/m], 다이아프램 표면의 음압[Pa], 전자기력을 의미한다. 전자기력은 다이아프램의 변위 에 따라 Eq. (3)과 같이 정의된다. 다이아프램이 스위치가 꺼지는 위치인 를 초과하여 이동하는 경우, 전류가 공급되지 않아 전자기력이 0이 되므로 이를 Heaviside step function을 이용하여 모델링했다. 즉, > 영역에서는 전자기력이 작용하고, < 영역에서는 자유 진동 상태가 된다.
여기서 , , , , 는 코일의 턴수, 진공에서의 투자율, 아마추어의 단면적[m2], 아마추어와 폴 사이의 초기 거리[m], Heaviside step function, 스위치가 끊어지는 위치[m]를 나타낸다.
2.2 비선형 강성
다이아프램의 기하학적 비선형성은 변위에 따라 강성이 변화하는 형태로 나타나며, 강성 Eq. (4)와 같이 정의된다.
여기서 는 다이아프램에 작용되는 힘을, 는 다이아프램의 변위를 의미한다. 일반적으로 작은 변위에서는 변위에 따라 강성이 일정하게 유지되지만, 큰 변위에서는 변위에 따라 강성이 변할 수 있고, 본 논문에서는 이러한 특성을 반영하기 위해 변위에 따른 비선형 강성을 적용한다.
III. 해석 방법
3.1 유한 요소 모델
본 논문에서는 작동 범위 내에서의 다이어프램 강성을 평가하기 위하여 COMSOL Multiphysics 6.0(COMSOL, Inc., Burlington, MA, USA)을 이용해서 유한 요소 수치 해석을 수행했다. 3차원 모델은 계산 비용이 매우 크므로 Fig. 2와 같이 3D CAD 형상으로부터 2D 축대칭 모델을 추출하여 단순화했다. 다이아프램, 아마추어, 리벳 와셔는 축대칭 형상을 가지고 있으므로 이러한 단순화 과정은 유효하다. 다이아프램의 기하 형상은 Fig. 2에서 노란색으로 표시된 부분과 같으며, 시뮬레이션에서 각 부품들의 밀도, 영률, 푸아송비는 측정값을 활용했다. 해석 시 경계 조건은 Fig. 2에서 다이어프램의 끝부분을 고정단으로 설정했고, 아마추어는 축으로 힘을 인가하여 변형된 변위를 계산했다.
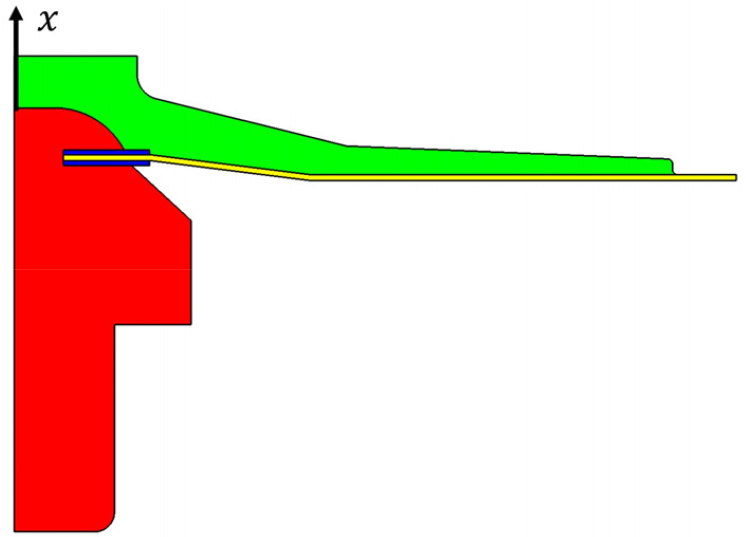
Fig. 3는 인가된 힘에 대한 다이아프램의 변위를 나타낸다. 아마추어와 다이아프램이 뱡항으로 지나치게 올라가면 쉘 커버와 부딪치고, - 방향으로 지나치게 내려오면 폴과 부딪치게 된다. 따라서 초기 위치를 0 mm로 기준으로 하여 –0.6 mm ~ 1 mm 범위에서 FD 곡선을 계산했다. FD curve 결과에 대해 polynomial fitting을 수행한 결과, Eq. (5)와 같은 3차 다항식 모델로 근사할 수 있었다.
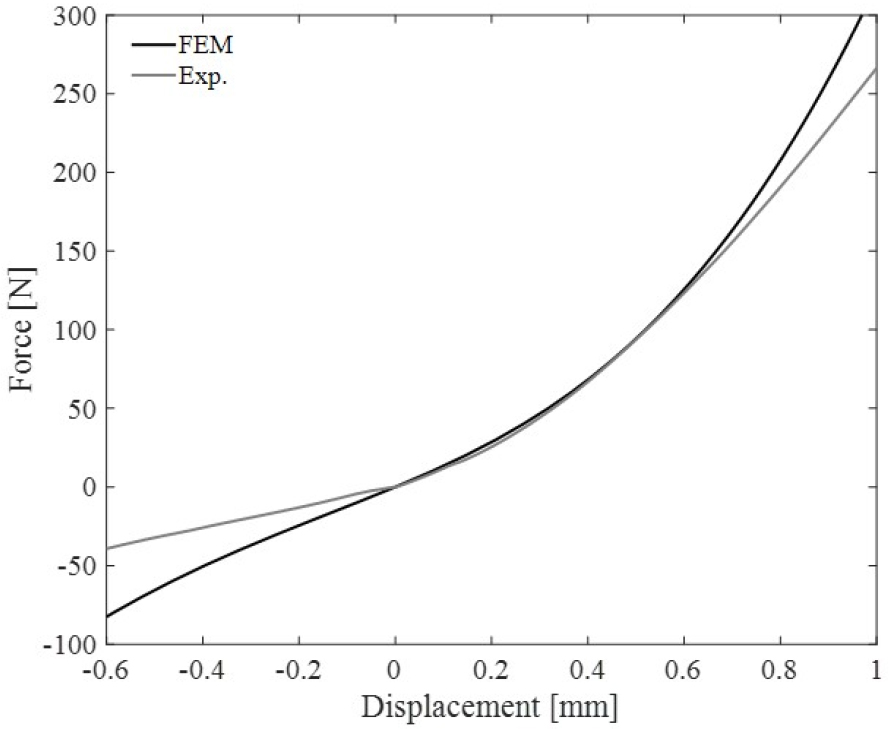
여기서 는 아마추어 중심부의 변위[m], 는 인가된 힘[N]을 의미한다. Table 2와 같이 3차 모델이 가장 높은 결정계수(=0.9999)를 나타내었다. 수치 해석은 Intel® Xeon® Processor E5-2687W v2 CPU 및 256 [GB] RAM을 갖춘 시스템에서 수행되었다. 2D 축대칭 모델로 간소화하더라도 전자기와 스위치 작동을 포함하는 시간 영역 해석을 수행할 경우, 계산 시간이 수십 분에 이르나, 이를 동등한 LPM으로 치환할 경우 수초 이내로 전자기–기계–음향 응답을 계산할 수 있다.
Table 2.
Coefficient of determination for different polynomial fitting orders.
| Polynomial | |
| Linear | 0.9462 |
| Quadratic | 0.9845 |
| Cubic | 0.9999 |
3.2 집중 매개변수 모델
고주파 성분을 포함하기 위해 다이아프램을 3 degree-of-freedom[14]로 모델링하는 접근법도 존재하나, 이 방법 역시 변위에 따른 비선형 강성을 포함하지 못한다. 따라서 본 연구에서는 FEM 및 FD 측정을 통해 다이아프램의 비선형 강성을 확인하고, 비선형 강성의 측정값을 포함하도록 변위에 따른 강성을 적용했다. 쉘 혼 시스템의 미분방정식인 Eqs. (1), (2)는 Simulink 환경에서 수치해석적으로 계산한다. 해석 조건과 관련하여 Solver type은 Backward Euler을 적용했고, 높은 주파수 성분을 모두 포함하도록 고정 시간 간격 1 μs로 설정했다. steady state에 도달하도록 전체 해석 시간은 0.2 s만큼 수행했다. 본 논문에서는 쉘 혼에 인가되는 전압을 12 V로 설정하였고, 음향부는 실험과의 속도 비교를 위해 별도의 쉘이 없는 상황을 가정했다. 코일의 저항 과 인덕턴스 은 임피던스 분석기로 측정한 값을 사용했다. 아마추어와 다이아프램의 무게 합 은 실측값으로 적용했으며, 감쇠 계수는 0.2 kg/s로 가정했다. 음향 부하는 강체 베플 피스톤으로 간주하여 계산했다.
IV. 실험 결과
4.1 정적 FD 곡선 측정
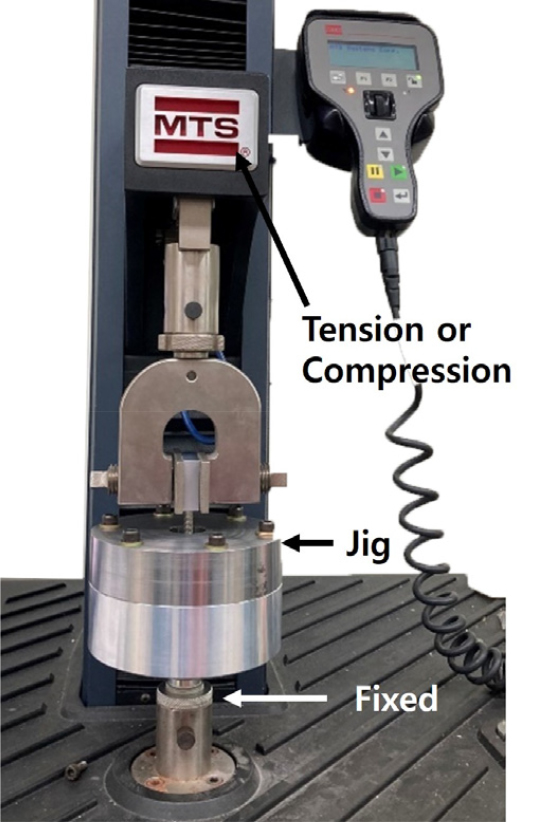
다이아프램의 기계적 비선형성을 정량적으로 확인하고자 정적 FD곡선을 측정하고, 측정된 비선형 강성을 LPM에 포함하도록 모델을 개선한다. Fig. 4는 정적 FD 곡선을 측정하기 위한 실험 구성을 나타낸다. MTS사의 Universal Testing Machine(UTM)를 활용했으며, 아마추어와 연결된 구성 요소를 0.5 mm/min의 속도로 변위 제어하며 힘을 측정했다. FD curve의 측정 결과는 Fig. 3과 같고, 유한 요소 모델에서는 다이아프램의 끝단을 고정단으로 설정했으나, 실제 실험에서는 다이아프램을 직접 접촉할 경우 응력 분포에 영향을 줄 수 있으므로 바디와 쉘 커버가 지그와 직접적으로 접촉되도록 했다. 위의 이유를 포함하여, 지그의 강성이 이상적인 강체와 차이가 있으므로 시뮬레이션 대비 강성이 작게 측정된 것으로 판단된다. 인장과 압축 실험을 진행한 후 초기 위치로 복귀했을 때, 잔류 힘이 남아있는 것을 관찰했다. 이는 다이아프램 재질이나 형상에 의한 히스테리시스로 예상되었고, 이는 동적 측정에서 확인된다.
4.2 동적 FD 곡선 측정
PCB 사의 임피던스 센서인 Mechanical impedance sensor 288D01를 활용한 다이아프램의 동적 FD 곡선 실험 셋업은 Fig. 5와 같이 구성한다. 석정반의 질량이 32 kg이며, 다이아프램과 아마추어의 무게 합은 31.8 g으로 약 1,000배 이상 차이가 나므로 석정반은 상대적으로 고정단으로 간주할 수 있다. 임피던스 센서는 두 개의 단자가 존재하며, 하나는 힘을, 다른 하나는 가속도를 측정할 수 있다. 임피던스 센서와 SR785 신호 분석기를 활용하여 힘과 가속도를 실시간으로 측정하였고, 가속도를 두 번 적분하여 변위를 계산했다. 적분 시 생성되는 적분 상수 항은 MATLAB의 detrend 함수로 보정했다.
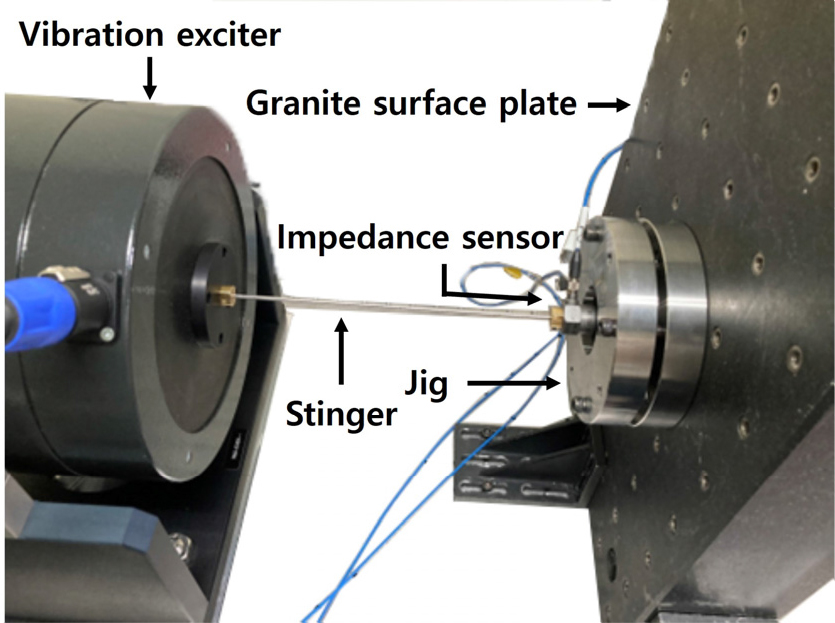
Brüel & Kjær Type 4808 가진기는 사인 함수 구동 시 12.7 mm의 변위 한계와 1.4 m/s의 속도 한계를 지니고 있으나, 측정 범위 내에 본 논문의 관심 영역이 있으므로 제약이 없다. 스팅어는 가진기와 측정하고자 하는 대상체 사이에 들어가는 보조 장비로, 축 방향으로의 힘만 전달되도록 보조한다.
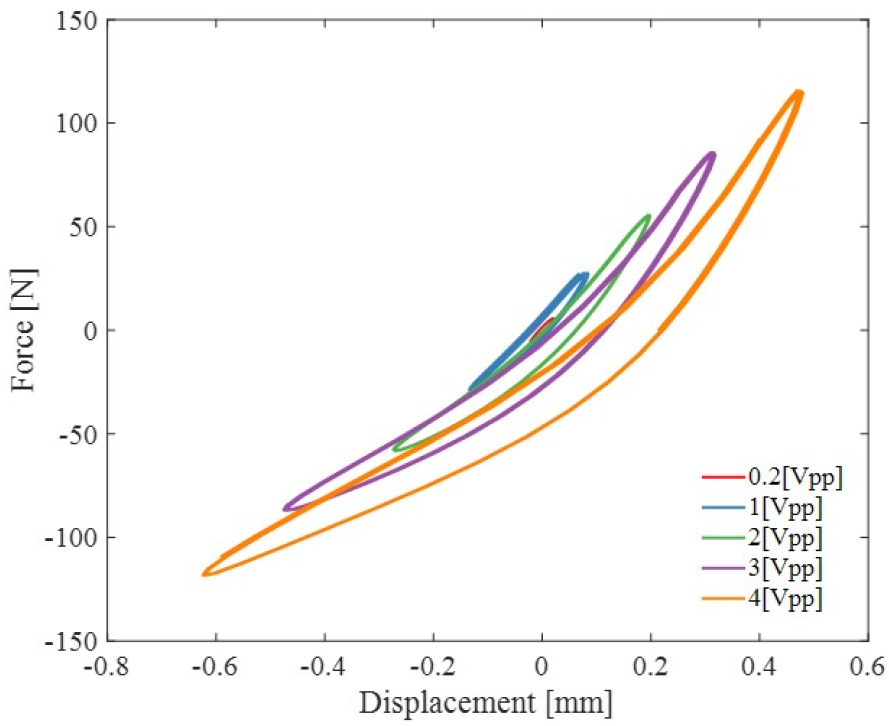
1 kHz의 주파수로 가진할 경우, 가속도가 200 m/s2 라고 하더라도 변위는 5 μm에 지나지 않는다. 본 연구에서는 0.5 mm 수준의 변위를 확보하고자 50 Hz로 가진했고, 인가하는 전압의 크기를 단계적으로 증가시키며, Fig. 6과 같이 동적 FD 곡선을 측정했다. 주어진 다이아프램의 형상에서 0.1 mm 이하의 작은 변위에서는 선형으로 간주할 수 있으나, 큰 변위로 갈수록 비선형적 성향이 두드러지고, 루프 내부의 면적을 통해 히스테리시스에 의한 영향과 감쇠 또한 확인할 수 있다.
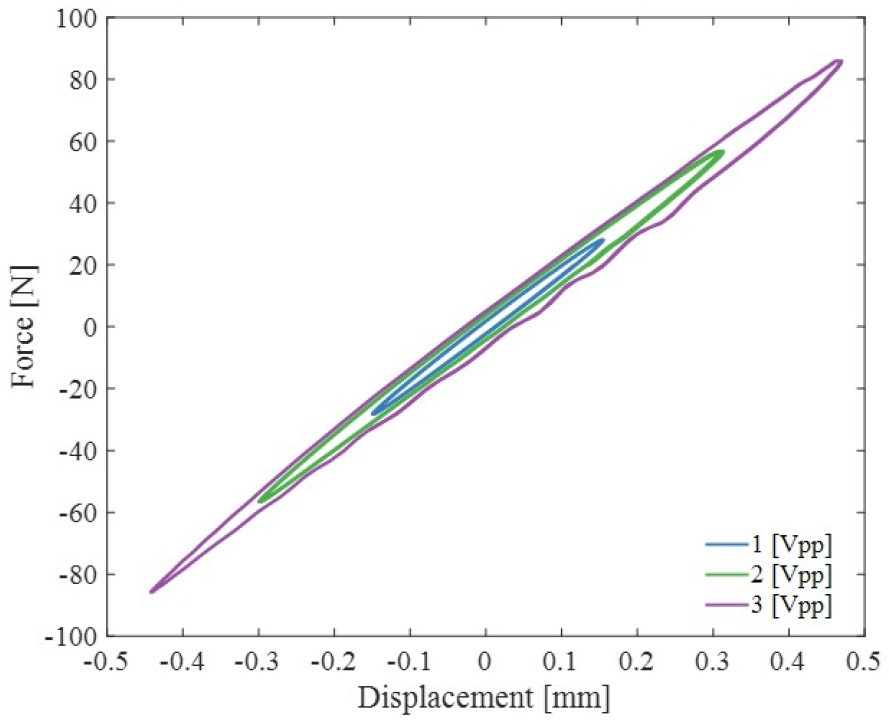
동일한 형상에서 단차를 두어 선형성을 증가시킬 수 있으며, Fig. 7과 같이 큰 변위에서도 강성이 변하지 않고 기존 형상 대비 선형성이 증가함을 실험적으로 확인했다. 기존의 선형 다이아프램 모델을 적용하고자 할 경우, 선형성을 증가시키도록 다이아프램의 형상을 변형시킬 수 있으나, 다중 물리 시스템에서 하나의 변수가 복합적으로 다른 물리계에 영향을 줄 수 있다.
4.3 아마추어 중심 속도 측정
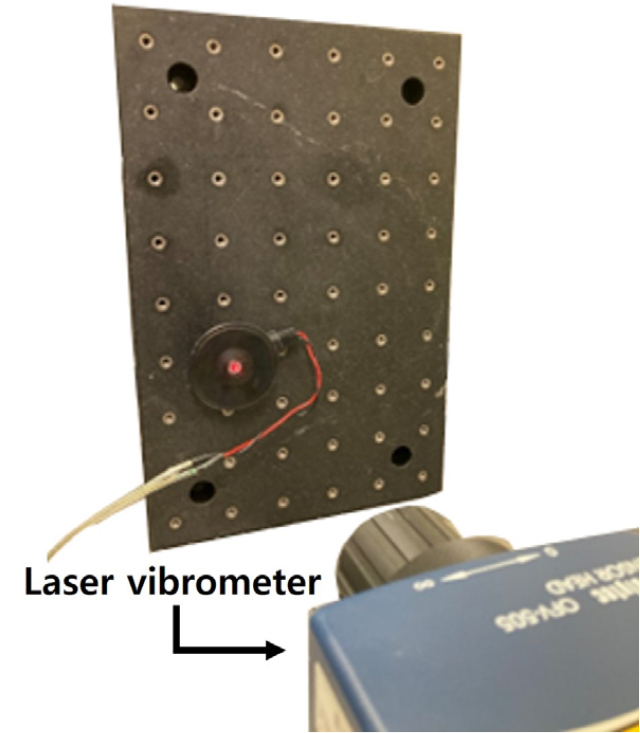
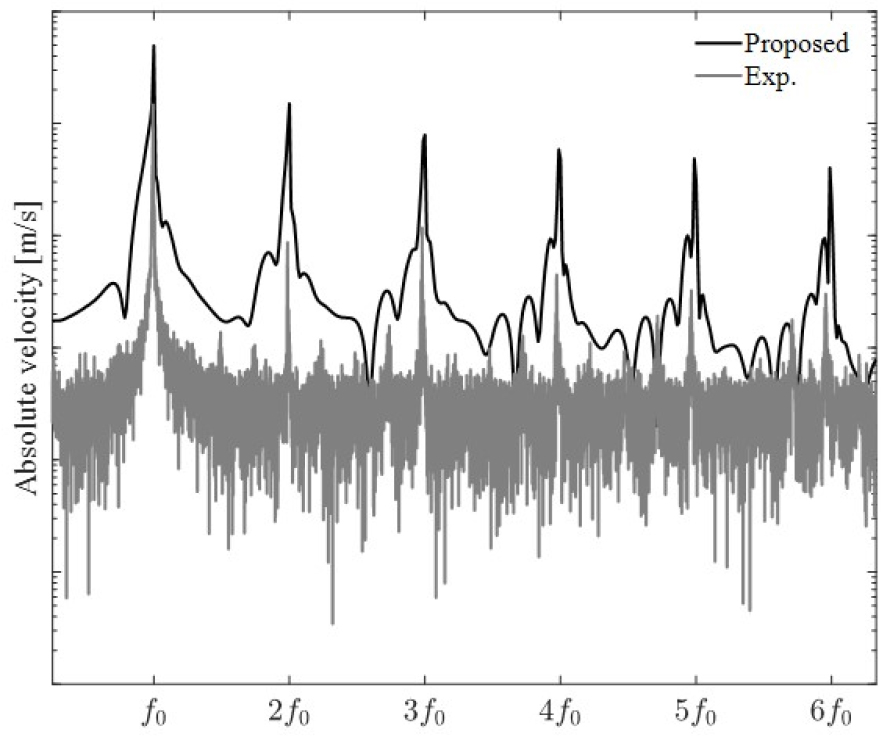
예측한 기본 작동 주파수와 하모닉스 성분이 발생하는지 표면 속도를 측정하여 제안한 모델과 비교했다. 쉘이 포함될 경우, 아마추어가 외부로 노출되지 않아 속도 측정에 어려움이 있기 때문에 쉘의 영향은 해석과 실험에서 고려하지 않았고, 실험 시 Fig. 8과 같이 쉘은 제외하고 아마추어의 속도를 측정했다. 쉘 혼의 음향부에 대한 모델링과 설계는 이미 많은 논문들에서 다루었으므로 본 논문에서는 다루지 않았다.[8,9] 계측 장비는 4.2절과 동일하며, 전원 공급을 위하여 Keysight사의 Autoranging DC power supply E36231A 장비로 일정한 직류 전압 12 V를 인가했다. Laser Doppler Vibrometer(LDV)는 대상 표면에서 반사된 레이저의 도플러 이동을 검출하여 속도를 비접촉 방식으로 측정하는 장비이다. 본 논문에서는 Polytec OFV-505 vibrometer sensor head를 사용하여 아마추어 중심 지점의 축 방향 속도를 측정했다. Fig. 9는 속도의 절댓값에 대한 주파수 응답을 나타내며, LDV로 측정된 데이터는 회색 실선으로 표현했고, 제안된 모델로 계산된 결과는 검은색 실선으로 나타냈다. 두 결과를 비교해보면, 기본 작동 주파수 뿐만 아니라 하모닉스 성분들에 대해서도 예측할 수 있다. Fig. 9에서의 결과를 Table 3와 같이 정리할 수 있고, 상대오차 1 % 미만으로 예측할 수 있었다. 절대적인 속도의 크기는 전자기부의 아크 저항,[4]전자기부의 에디 전류 저항,[15] 다이아프램을 비롯한 기계부의 감쇠로 인해 오차가 발생한 것으로 판단된다.
V. 결 론
본 논문에서는 쉘 혼 시스템의 핵심 부품 중 하나인 다이아프램의 비선형 강성을 유한 요소 모델과 실험을 통해 정량적으로 규명하고, 이를 제안한 집중 매개변수 모델에 반영하여 쉘 혼의 거동을 정확히 기술하고자 했다. 유한 요소 기반 정적 해석과 UTM을 활용한 정적 FD 곡선 측정을 통해 다이아프램이 수백 마이크로미터 이상의 변위에서 비선형 강성을 나타냄을 확인했다. 또한 임피던스 센서를 활용한 동적 FD 곡선 측정을 수행함으로써 비선형 응답뿐만 아니라 히스테리시스 특성도 관찰할 수 있었다.
이러한 정적·동적 특성을 반영하여 다이아프램의 비선형 강성을 집중 매개변수 모델에 적용하였으며, 개선된 모델은 전자기–기계–음향을 포함하는 미분방정식을 기반으로 스위치의 on/off 동작까지 반영했다. 속도 측정 실험과 비교한 결과, 1차부터 5차 하모닉스 주파수까지 정확하게 예측할 수 있었으며, 이를 통해 제안된 모델의 유효성을 확인했다. 본 논문에서는 다이아프램의 비선형적 강성과 이를 반영한 집중 매개변수 모델을 살펴보았고, 향후 쉘 혼의 성능 개선 및 설계 연구를 위한 유용한 기반 모델로 활용될 수 있을 것으로 기대한다.
