

I. 서 론
II. 다중 경로 신호 정합 기법
2.1 시간영역 MFP
2.2 스코어-패널티 법
III. 시뮬레이션
3.1 수중 음속 오정합과 모델링 수치 오차가 모두 없는 경우
3.2 모델링 수치 오차만 있는 경우
3.3 수중음속의 약한 오정합이 있는 경우
3.4 수중 음속의 강한 오정합이 있는 경우
IV. 결 론
I. 서 론
수중에서 음파는 음속구조의 변화에 따라 굴절하고 경계면의 복반사에 의해 음파의 분산이 발생하기 때문에, 음파의 도달시간이나 도달시간차 정보만을 이용해 수중표적 위치를 신속하고 정확하게 추정하는 것은 매우 까다롭다.[1,2] 특히 표적의 심도 추정은 표적 거리 추정에 비해 그 값의 상대적인 스케일이 작으며, 물리적으로 표적 거리와 연성이 되어 있어서 더욱 어렵다. 표적의 심도 추정값의 오차를 줄이는 가장 좋은 방법은 배열 성능을 높혀서 정보를 추가하거나 또는 다중 경로에 대한 정보를 심도 추정에 반영하는 것이다.[1,3]
정합장 처리 기법(Matched-field prcessing method, MFP)은 배열 정보 이득과 다중 경로 정보 이득을 모두 사용하는 기법이다.[3] 해양환경의 다중 경로를 모사한 예측결과인 모의음장과 측정음장의 매칭을 이용해 표적의 위치를 추정한다. MFP의 성능은 배열의 기본성능, 배열과 표적의 기하학적 배치, 복제음장의 정확도 등과 밀접한 관련이 있다.[1,4] 예를 들어 수평선 배열의 broadside방향에 표적이 위치한 경우, 복제음장 계산을 위해 사용된 수중 음속 구조의 오정합이 발생한 경우, 배열의 기본 성능이 너무 낮은 경우에는 MFP의 성능은 저하된다. MFP의 성능은 주파수 대역과도 밀접한 관련이 있다. 해양환경 오정합에 의한 음파의 오차는 주파수에 비례하여 증가한다. 주파수가 높을수록 측정음장과 모의음장간의 일관성(coherence)이 깨지는 것이다.[5] 또한 1 kHz 이상의 중고주파 영역에서는 음파전달모델의 한계도 존재한다. 중고주파 영역에서 사용하는 음선 모델은 특이점을 통과하는 음선이나 음영구역의 음장은 정확하게 모사할 수 없다. 그렇기 때문에 MFP는 주로 저주파수 대역의 수직선 배열을 이용한 표적의 위치 추정에 많이 사용된다.
최근에 해양 음향 분야에서 수중의 포유동물의 수동 위치 추적에 대한 많은 연구가 이루어지고 있다.[6,7] 이러한 포유동물들은 돌고래, 바다사자, 바다코끼리 등이 있는데 이들이 내는 소리는 500 Hz ~ 2000 Hz, 2000 Hz ~ 6600 Hz 등 중주파수 대역에 분포해있다. 포유동물의 소리는 근거리에서 측정되기 때문에 소음대 잡음비가 크다. 그러므로 청음기 한 두 개를 이용하여 위치추정과 추적을 수행하는 연구가 많다. 이 연구가 기존의 MFP와 다른 점은 모의신호와 측정신호를 정합시키는 방법이다. 포유동물의 소리는 연속적인 순간소음 형태로 발생하고 다중경로를 통해 수신 되는데, 생물음이므로 각각의 ping 사이의 신호크기나 신호 모양이 완전히 동일하지 않다. 그렇기 때문에, 포유 동물 위치추적을 할 때, 해양음향 연구자들은 모델 신호와 측정 신호의 정합을 이용하면서, 표적 신호의 불확실성을 정합에 대한 손실함수에 반영하려고 시도했다. 본 연구에서는 위와 같은 기법을 스코어-패널티 기법이라 명명했다.
본 연구에서는 시뮬레이션을 이용해 한 개의 청음기를 이용한 수동 표적의 심도 추정에 스코어-패널티 기법을 적용해 보았다. 표적의 소음원 정보는 알고 있다고 가정했다. 기존 포유동물 추정에 사용된 방법은 중주파수 대역의 ping 형태로 수신되는 측면에서 수동 소음원의 정보를 알 때의 표적 위치추정과 공통점이 있다. 이러한 문제는 능동 표적 심도 추정에도 쉽게 응용될 수 있다. 본론에서는 스코어-패널티 방법의 평가와 비교를 위해 시간영역 MFP의 결과도 함께 도시했으며 스코어-패널티법의 장점과 한계를 분석하는데 중점을 두었다.
II. 다중 경로 신호 정합 기법
본 연구에서는 수신기가 정지해 있는 심해 해양 환경을 가정하였으며 수동 표적은 수중에 위치해 있다고 생각했다. 수동 표적은 중주파수 펄스 신호를 방사하고 있다고 생각했고 펄스 신호는 알려져 있다고 가정했다. 수신기는 앞서 기술했듯이 한 개의 청음기이다. 다중 경로 정보이득에 따른 스코어-패널티 법의 성능만을 분석하기 위해서 배열은 사용하지 않았다.
2.1 시간영역 MFP
시간 영역 MFP는 다중경로를 고려한 정합필터로 볼 수 있다.[8] 표적의 거리와 수심을 라고 할 때, 측정신호는 로 표현한다. 표적의 거리와 수심을 라 가정할 때, 수신 청음기에서의 모의신호는 로 표현한다. 참고로 펄스 신호의 파형을 로 표현하고, 수중의 한방향 임펄스 응답을 라고 할 때, 가 된다. 여기서 *는 컨벌루션 연산자이다.
이때, 시간영역 MFP의 손실함수는 아래와 같이 표현할 수 있다.
여기서 T는 신호의 에너지를 충분히 포함하는 시간으로 본 연구에서는 99 %의 에너지를 포함하는 시간으로 정의했다. 위 손실 함수는 측정신호와 모의신호가 정확하게 동일하다면 1의 값을 산출하며, 완전히 다르다면 0의 값을 산출한다.
2.2 스코어-패널티 법
포유동물 추적에 사용된 Mouy et al.[7]의 방법은 수동으로 생물음을 이용하는 것이기 때문에 ‘생물음 신호탐지-측정신호의 전처리-모의신호 정보와 비교를 통한 스코어-패널티 과정’으로 이루어진 탐지 및 위치추정 알고리즘으로 구성되어 있다. 본 연구에서는 소스 신호를 알고 있다고 가정했으므로 위 전체 방법에서 스코어-패널티 법만을 연구에 적용했다.
우선 수신기에 수신된 신호는 정합 필터를 거쳐서 신호 이득을 얻는다. 이때 정합 필터링을 거친 측정신호를 라고 한다. 는 원 신호인 에 비해 ping의 펄스 폭이 달라진다. 예를 들어, 펄스 폭 T0, 주파수 밴드 B인 LFM신호는 정합 필터를 거치면 펄스폭은 1/B로 축소되며, 마찬가지로 펄스폭 T0의 CW신호가 정합 필터를 거치면 펄스폭은 2T0로 늘어난다. 본 연구에서는 스코어-패널티 법의 아이디어와 적합한 LFM 신호를 능동신호로 사용한다.
표적의 거리와 수심을 라 가정할 때, 음선 모델을 이용해 각 다중 경로의 지연시간을 계산할 수 있다. 다중 경로의 지연 시간을 라고 할 때, 스코어 함수는 아래와 같이 사각함수를 이용해 표현된다.
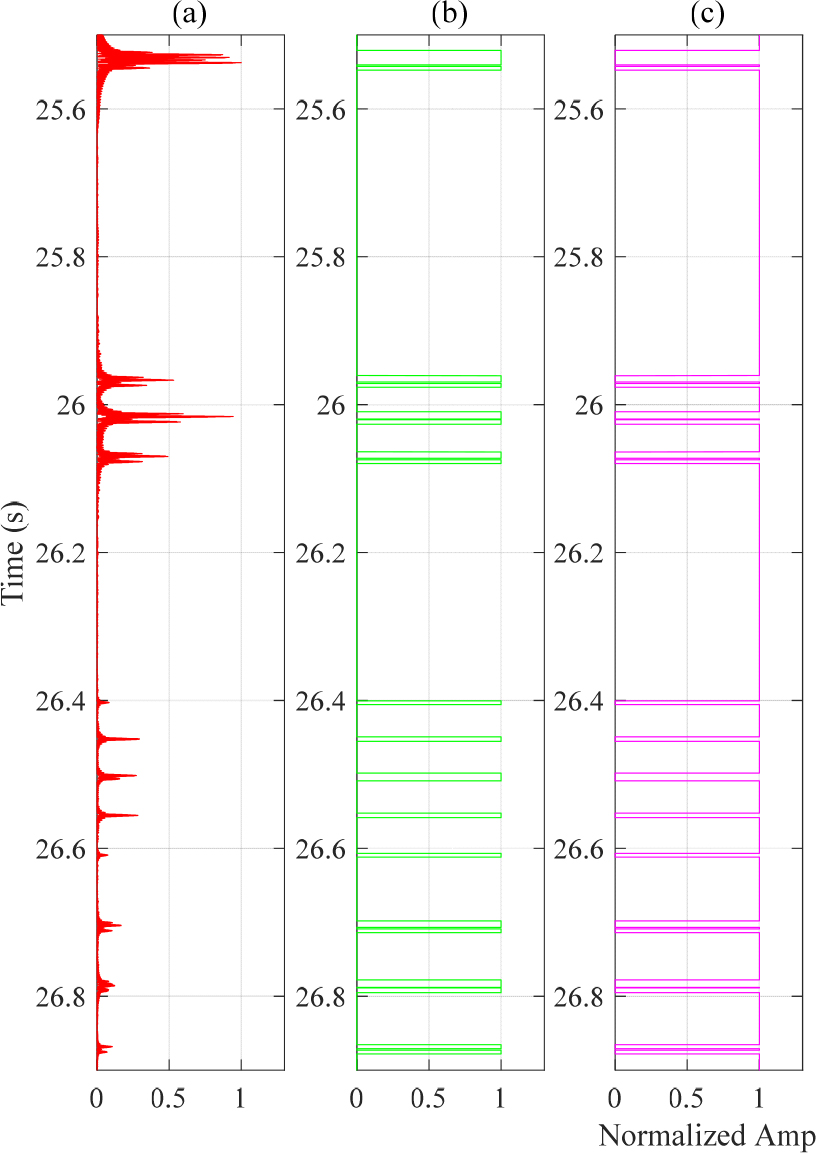
여기서 N은 다중경로의 개수, 는 사각함수의 폭을 나타내주는 파라미터로 사용자가 설정해줘야 한다. 이 클수록 음선의 도달 시간의 불확실성을 고려한 것으로 볼 수 있다. 만약에 각 경로의 사각함수가 겹치는 경우에는 서로 산술적으로 합쳐주는 것이 아니라 폭이 넓어진 하나의 사각함수로 취급한다. 패널티 함수는 논리연산자인 not을 이용하여 으로 표현된다. not[]은 입력값 0은 1로 바꾸고, 1은 0으로 바꾸는 역할을 한다. Fig. 1은 정합필터링 된 신호, 스코어 함수, 패널티 함수의 예를 보여준다.
Mouy et al.[7]이 정의한 스코어-패널티법의 손실함수는 스코어함수와 패널티 함수를 이용해 아래와 같이 쓸 수 있다.
여기서 은 표적의 (r, z) 위치에서 모델 신호의 음선 개수이다.
위 식에서 분자항은 측정신호와 모의신호의 도달시간의 정합성을 나타내주는 양이며, 분모항은 측정신호와 모의신호의 도달시간의 부정합성을 나타내주는 양이다. 손실함수는 정규화되어 있지는 않으나 정합성이 크고, 부정합성이 작을수록 큰 값을 가지도록 설계되어 있다. Mouy et al.[7]은 Eq. (3)을 이용해 수심 30 미터의 천해에서 표적 거리 1 km 이내의 위치한 바다코끼리의 위치를 성공적으로 추정했다.
그러나 우리의 연구 결과 Eq. (3)은 심해 환경에서는 비일관적인 결과를 도출하는 것을 발견했다. 심해환경은 Eq. (3)이 제안된 천해환경과는 달리 송수신기의 심도에 따라 도달하는 음선의 이력(예. 바닥 반사 음선, 수중 굴절 음선 등)과 음선 개수가 크게 달라질 수 있다. 그러므로, 본 연구에서는 Eq. (3)을 아래와 같이 수정했다. 아래의 식은 Eq. (3)의 분자와 분모에 해당하는 부분을 정규화 해 준 것으로 모드 개수의 변화에 관계없이 일관적인 결과를 제공한다.
III. 시뮬레이션
시뮬레이션에 사용한 해양환경은 동해와 유사한 심해 환경으로 Fig. 2와 같다.[9] 송수신기 및 수중 표적의 배치도도 함께 표시했다.
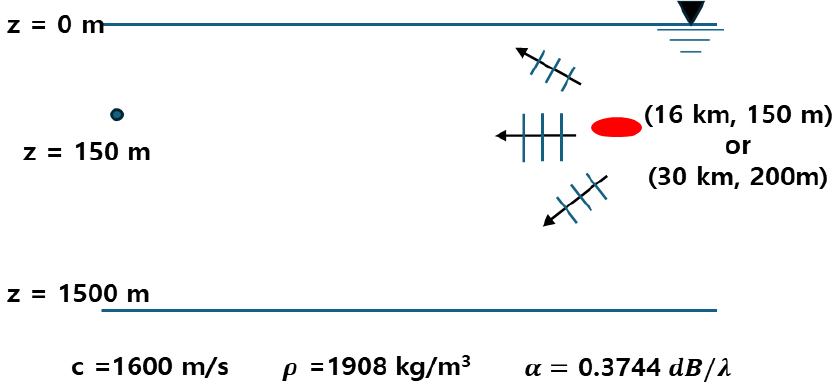
Fig. 3은 시뮬레이션에 사용된 음속 구조를 나타낸다. 사용된 수중 음속 구조는 총 3가지이다. 수중 음속 구조 a는 기준 음속 구조로 실측 신호를 측정할 때의 음속으로 가정했다. 참고로 이 음속 구조는 동해 특정 해역에서 XBT를 이용해 직접 측정된 값이다. 수중음속 b1은 기준 음속 대비 약한 변동성을 갖는 음속 구조이며 수중음속 b2는 기준 음속 구조와 차이가 큰 음속 구조이다. 수중음속 b1와 b2는 음속 오정합의 영향을 관찰하기 위해 사용한다.
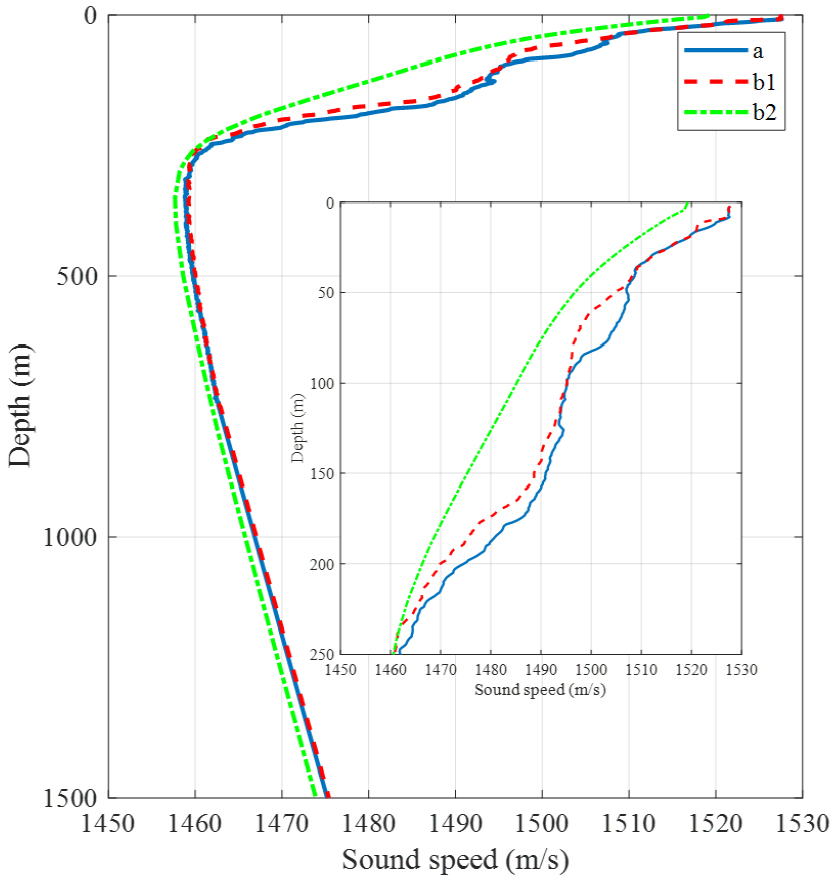
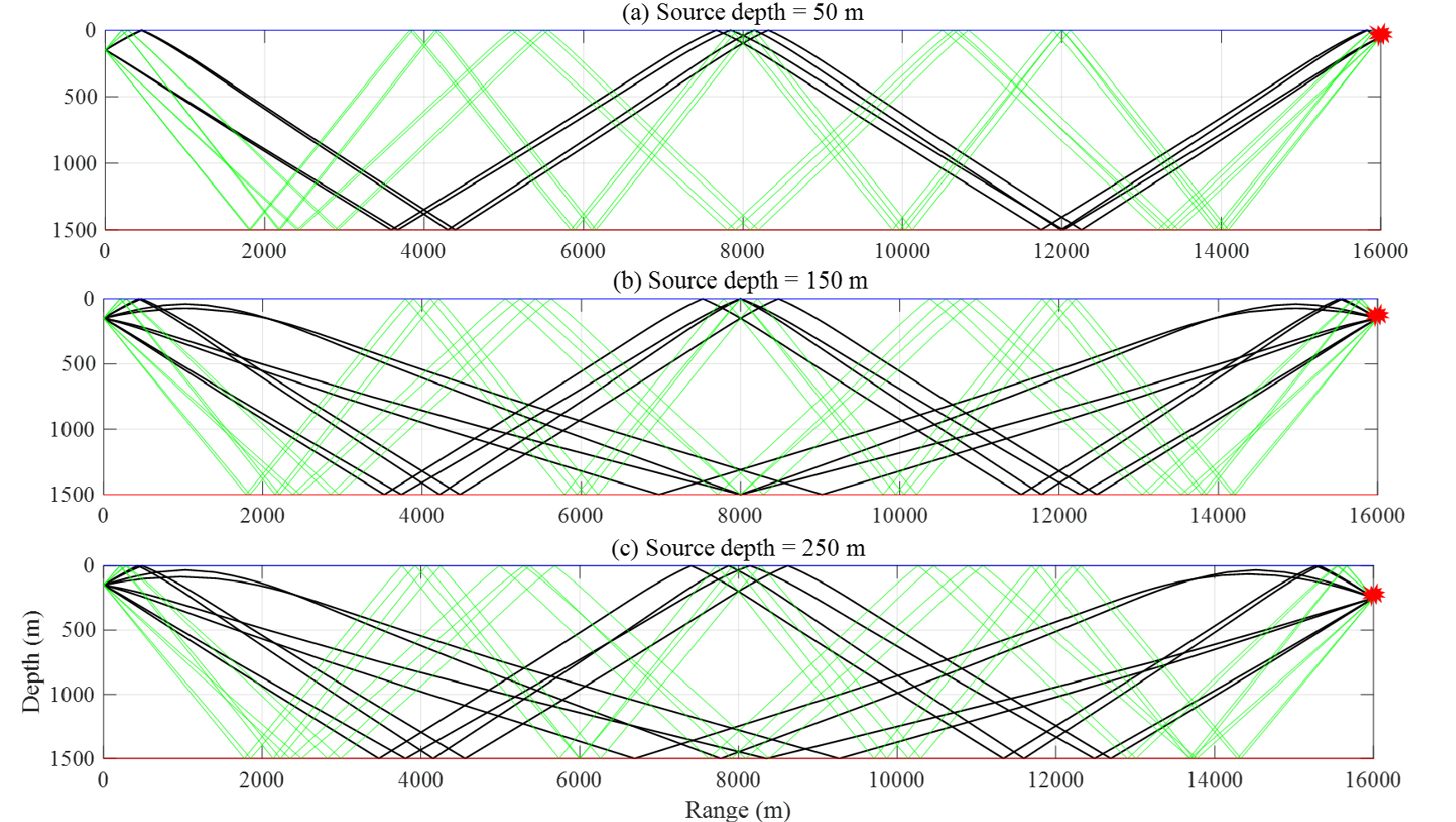
Fig. 4는 Fig. 3의 수중음속 b2에 대한 고유음선 구조를 보여준다. Fig. 2처럼 송신기가 우측에 있고 수신기가 좌측에 있는 환경이다. 수신기의 심도는 150 m이고, 송신기의 심도는 50 m, 150 m, 250 m로 변화시켰다. 그림에서 보는 것처럼 음원의 심도에 따라 고유음선 개수가 변하고 새로운 이력을 갖는 고유음선이 등장하는 것을 확인할 수 있다.
수치 실험에 사용한 펄스 신호는 펄스폭 1초에 주파수밴드 0.4 kHz의 LFM 펄스이다. 중심주파수는 3 kHz를 사용했다. 위 LFM 펄스보다 높은 ‘시간-주파수 곱’을 갖는 LFM 펄스로도 시뮬레이션을 수행했으나 본 연구 결과와 일치한 결과를 얻었기 때문에 따로 결과를 싣지는 않았다. 모의 신호를 만들기 위해 사용된 음선 정보는 음파전달모델인 BELLHOP[10]으로 계산했다. 음선 탐색은 –40 ~ 40°의 각도에서 수행되었다.
Fig. 2에서 보듯이, 수신기의 심도는 150 m로 고정하였고, 수중 표적의 심도는 거리 약 16 km에서는 150 m로 설정했고 (CASE A) 거리 약 30 km에서는 200 m로 설정했다 (CASE B). CASE A는 음원으로부터 해저바닥을 맞고 상향된 바닥 반사파 및 caustic을 통과한 반사파들이 혼합되어 있는 지점이며, CASE B는 음원에서 하향 굴절하다가 바닥 반사없이 해저면 근처에서 상향 굴절된 음선이 지배적이다.[9] CASE B에서는 표적위치 근처에서 수렴구역이 형성된다. 시뮬레이션에 사용된 LFM의 신호처리 이득이 높기 때문에 배경소음은 특별히 고려하지 않았다. 수신기에서 SNR이 0 dB라고 해도 신호압축에 따른 이득 때문에 소음의 효과는 거의 없었다. 다만 정합 필터링을 거쳤음에도 불구하고 배경소음이 수신신호보다 크다면 스코어-패널티 법의 적용은 이론적으로 쉽지 않다는 것을 밝혀둔다.
3.1 수중 음속 오정합과 모델링 수치 오차가 모두 없는 경우
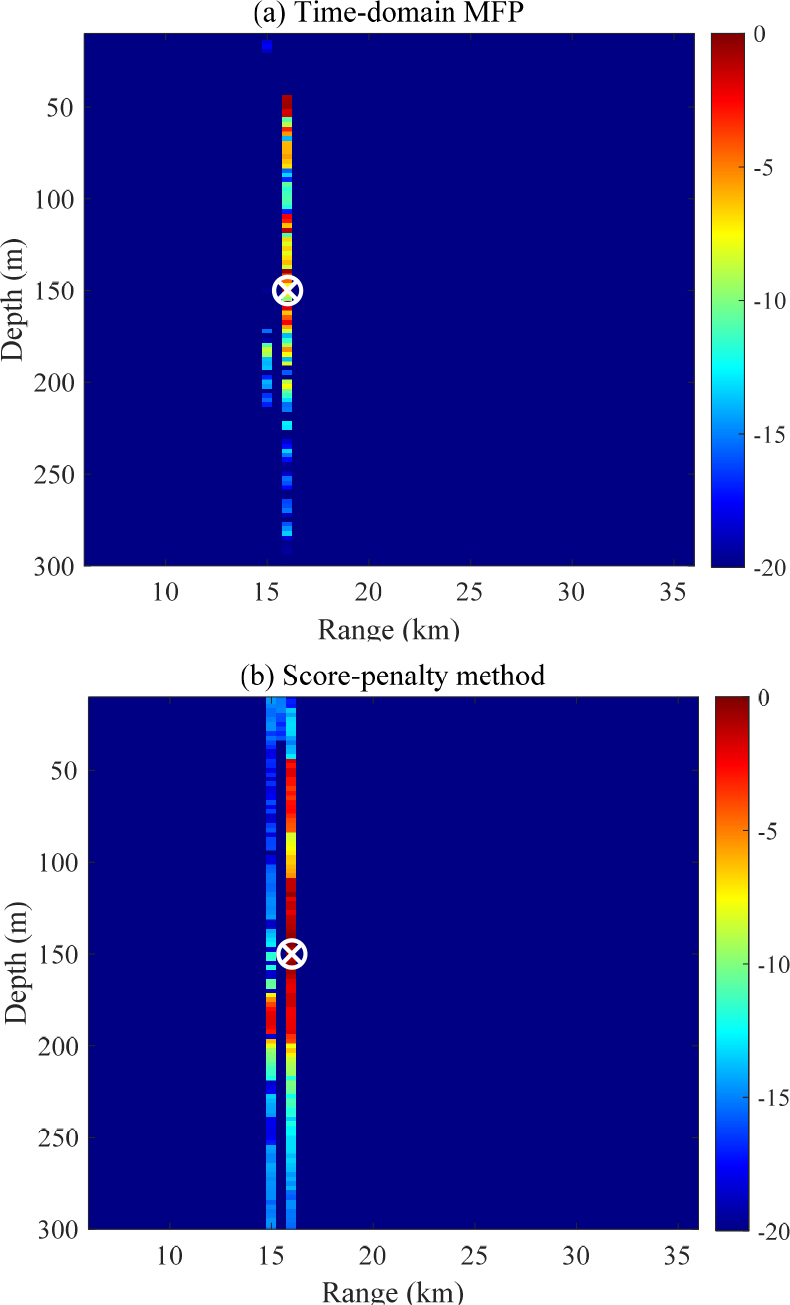
표적은 (16 km, 150 m)에 위치해 있다 (CASE A). 이 예제에서는 수중 음속의 오정합은 없다고 생각했다. 스코어-패널티 법의 파라미터는 5 ms이다. 이는 대략 송신신호의 null-to-null 펄스폭과 일치한다.
Fig. 5는 거리와 수심에 따른 시간영역 MFP와 스코어-패널티 법의 손실함수를 보여준다. O는 표적의 실제 심도이며, X는 추정값을 나타낸다. 두 방법 모두 표적 심도를 정확하게 추정하는 것을 알 수 있다. 참고로 Fig. 5에서 스코어-패널티 법의 결과는 최대값으로 정규화했다는 것을 밝힌다. Fig. 6을 제외한 모든 그림에서 동일한 양을 사용했다.

손실함수의 특성을 자세히 파악하기 위해 Fig. 5에는 추정 표적 거리에서 표적 심도에 대한 손실함수를 선형 스케일로 도시했다. Fig. 6(a)는 시간영역 MFP의 결과이고 Fig. 6(b)는 스코어-패널티 법의 결과이다. Fig. 6(b)에서는 사각 함수의 폭이 1.25 ms, 5 ms, 20 ms일 때의 결과도 추가했다. 시간영역 MFP와 스코어-패널티법 모두 표적 심도를 정확하게 추정을 한다. 하지만 시간영역 MFP의 ‘주엽대 부엽비’(Peak-to-1st Side Lobe power ratio, PSL)는 0.11이지만, 스코어-패널티법의 PSL은 사각함수가 5 ms일 때 0.02였다.
Fig. 6(b)에 보듯이 스코어 패널티법은 사각 함수의 폭에 따라 변화한다. 사각 함수의 폭이 작을수록 PSL이 증가하는 경향이 관찰되었다.
사각 함수의 폭을 줄이는 것은 다중경로신호를 각각의 최대값 근처에서만 관측하겠다는 의미이다. 이와 같은 상황에서 실측신호와 모의신호 사이에 시간지연 불일치가 발생한다면 두 신호의 상관성은 크게 떨어질 것이다. 하지만 사각 함수의 폭이 늘어난다면 시간지연 불일치가 발생해도 손실함수의 값이 존재할 것이나 부엽의 증가를 야기할 것이다. 즉 사각함수의 폭에 따라 프로세서의 강인성이 높아지는 대신 분해능이 감소하는 효과를 주는 것이다.
3.2 모델링 수치 오차만 있는 경우
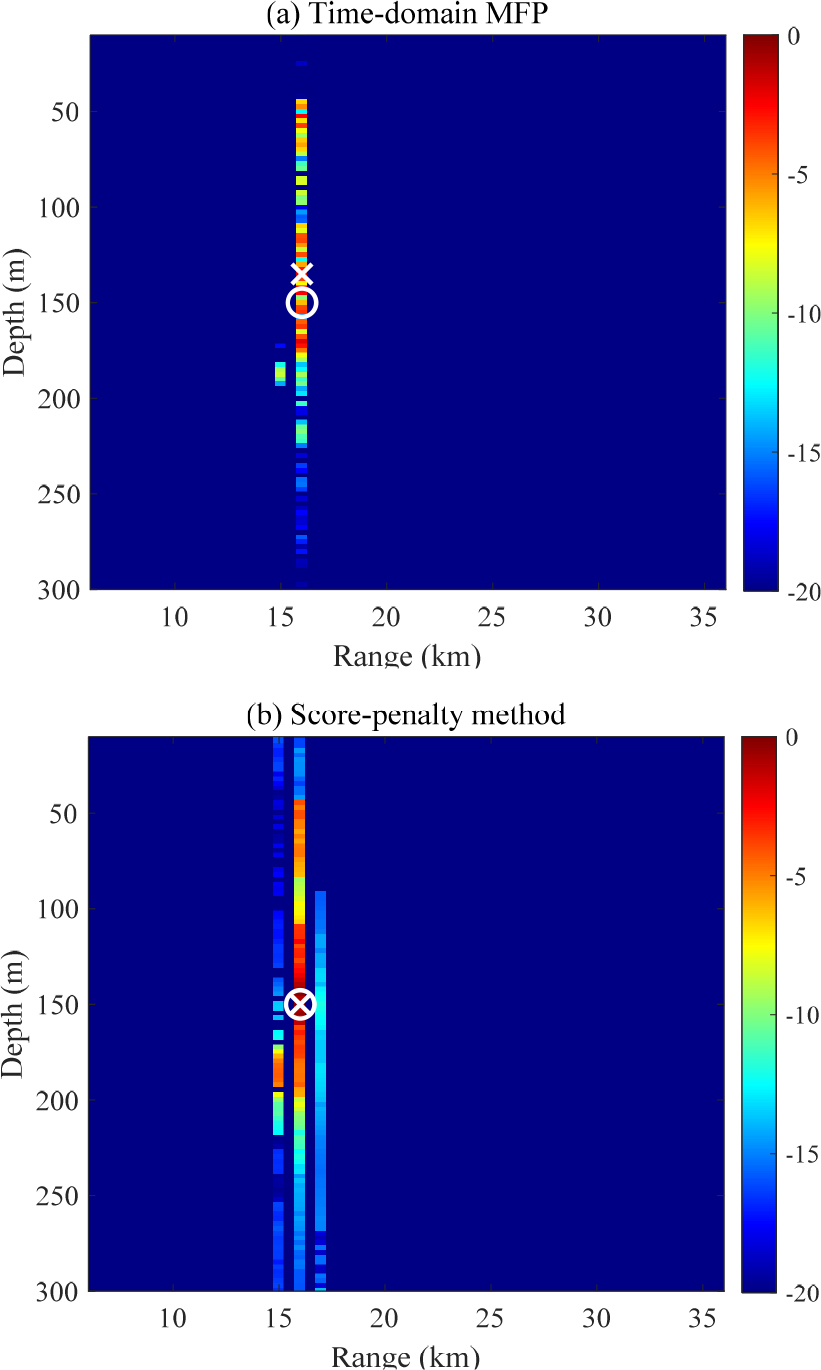
앞과 동일한 환경에서 모의신호에 모델링 수치오차가 있다고 가정했다. 현존하는 음선 모델은 caustic이나 cusp와 같이 음선 해가 발산하거나 또는 불연속 위상변화가 발생하는 지점을 음선이 통과할 때, 음선의 크기나 위상을 정확하게 모의하지 못한다.[11] 이 예제는 위와 같은 상황을 반영한 것이다. 수중 음속은 동일하다고 놓았으므로 지연시간의 오차는 고려하지 않았다. 크기 오차는 전체 음선 크기의 표준편차 값을 이용해 정규분포로부터 생성하였으며, 위상 오차는 [π/2, π, 3π/2, 2π]중에서 이산 균등 분포로 생성하였다. Fig. 7은 결과를 보여준다. 시간영역 MFP는 모델링 오차 때문에 바이어스가 발생하지만, 스코어-패널티 법은 정확한 심도를 찾는 것을 볼 수 있다. 이것은 스코어-패널티 법이 모의신호와 측정신호의 지연시간의 일치에 초점을 맞추는 방법이기 때문이다.
3.3 수중음속의 약한 오정합이 있는 경우
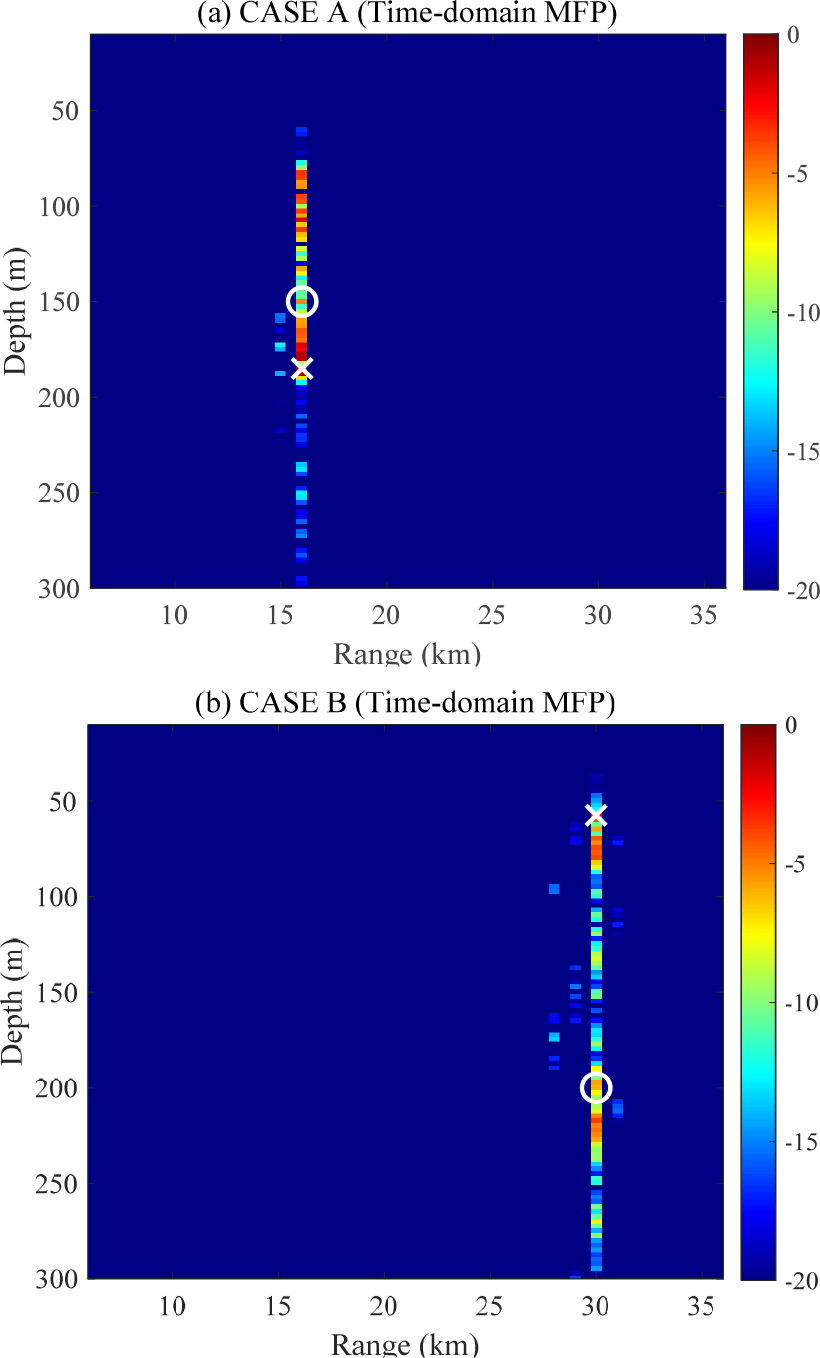
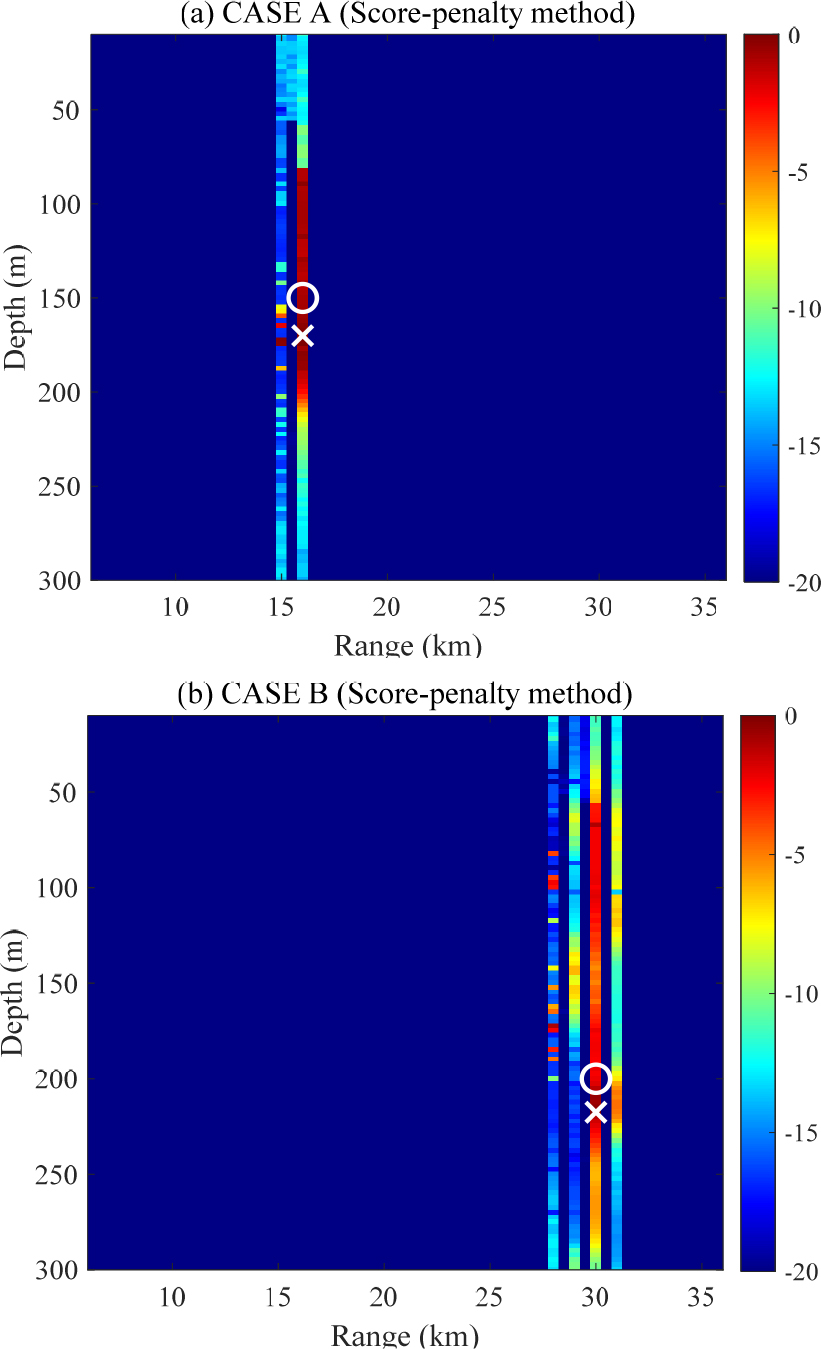
본 예제에서는 수중음속의 약한 오정합을 고려했다. 측정 신호는 Fig. 3의 기준 수중음속인 a를 사용했으나, 모의 신호는 b1을 사용해서 모의했다. 깊이별로 수온약층 영역에서 최대 약 10 m/s의 오차가 발생한다. Figs. 8과 9는 각각 CASE A와 CASE B의 표적에 대해 심도 추정을 수행한 결과이다. Fig. 8은 시간영역 MFP의 결과 수중음속 오정합에 의해 표적 심도의 오차가 크게 발생하는 것을 볼 수 있다. 하지만, 스코어-패널티 법을 사용한 Fig. 9는 비교적 작은 바이어스를 보인다. 이 결과는 5 ms의 사각함수를 사용한 것이다. 논문에 결과를 넣지는 않았지만 10 ms의 사각함수를 사용하면 바이어스는 반으로 줄어드는 것을 확인했다. PSL 측면에서는 시간영역 MFP가 스코어-패널티 법에 비해서 여전히 좋은 성능을 가진다.
3.4 수중 음속의 강한 오정합이 있는 경우
본 예제에서는 수중 음속의 강한 오정합을 고려했다. 측정 신호는 Fig. 3의 기준 수중 음속인 a를 사용했고, 모의 신호는 b2를 사용했다. 수온약층에서 두 음속간의 최대 차이는 약 20 m/s정도 이다. 이러한 시나리오는 아함에서 수중 음속을 현장에서 측정하는 것이 불가능하여 과거의 음속자료를 활용해야 할 때 발생할 수 있다. Fig. 10은 CASE A에 대해 시간영역 MFP 및 스코어-패널티 법의 결과를 보여준다. 이 그림에서는 스코어-패널티 법이 시간영역 MFP보다는 정확도가 높은 해를 추정하나 두 기법 모두 추정치는 큰 바이어스를 가지고 있다. 이러한 차이가 나는 원인은 큰 음속 오정합 때문에 측정신호의 다중경로 구조와 모의신호의 다중경로 구조 사이에 유사성이 사라지기 때문이다. 그림을 싣지는 않았지만 CASE B의 경우도 두 기법 모두 큰 오차를 보여줬으며, 음원의 위치가 달라졌을 때도 크게 변함이 없었다.

IV. 결 론
본 연구에서는 스코어-패널티 법을 펄스 음원을 가지는 수동표적의 심도 추정에 적용해 보았다. 스코어-패널티법은 모의신호를 만들 때 음선의 지연 시간 정보만을 이용하기 때문에 해저 바닥의 지음향 정보가 불필요하며, 음선 모델의 크기나 위상 오차에서 강인하다는 장점이 있다. 또한 실측신호와 모의신호의 손실함수를 계산할 때 논리연산을 활용할 수 있어서 계산속도가 약 2배 빠르다. 본 연구의 주요 가정은 수동표적의 음원은 알려져 있다는 것과 수중 음속에서는 필연적으로 오정합이 발생한다는 것이다. 수중 음속의 오정합은 해양환경의 시변동에 의한 약한 변동과 측정없이 과거 수중 음속의 추정치를 사용할 때 발생하는 강한 불일치를 각각 고려했다. 비교를 위해 시간 영역 MFP도 적용했다.
연구에서 얻어진 주요 결론은 다음과 같다. 첫째 기존의 손실함수를 심해 환경에 적합하게 수정했다. 둘째 스코어-패널티 법은 수중 음속의 약한 오정합이 있는 환경에서 시간영역 MFP보다 정확도가 높았다. 그러나 PSL은 시간 영역 정합장 처리기법에 비해 약 1/5이었다. 셋째 스코어-패널티법은 음선의 크기와 위상에서 모델링 오차가 존재할 때 시간영역 MFP보다 강인한 것을 확인했다. 이는 스코어-패널티 법이 지연시간의 정합에 초점을 둔 방법이기 떄문이다. 넷째 수중 음속의 오정합이 강한 환경에서는 스코어-패널티 법도 시간영역 MFP처럼 음원의 심도를 정확히 추정하지 못했다. 수중 음속의 오정합이 강할 때는 측정신호와 모의신호의 다중 경로의 구조 자체가 서로 다르기 때문에, 신호의 유사성에 기반을 둔 신호처리 기법으로는 성능향상에 한계가 있다는 것을 확인했다. 추후 연구로 본 연구를 능동 표적 심도 추정[12]으로 확장할 예정이며 스코어-패널티 법에 focalization의 개념[13,14]을 적용할 예정이다.
