

I. 서 론
능동소나를 이용하여 신호처리된 소나영상에는 주 표적인 잠수함 신호 뿐만 아니라 해수면, 해저면, 해저바위, 어군 등 원하지 않는 많은 신호들을 포함하고 있다. 이러한 표적 외 모든 반사 신호들을 클러터라고 한다. 클러터들은 표적의 탐지 및 추적 성능을 저하시키며 소나운용자에게 큰 부담을 준다. 기존에는 표적의 탐지 성능을 향상시키기 위하여 정합필터 출력 이후 클러터를 감소시키는 후처리 기법 연구가 진행되었다. 거리와 방위에 따른 정합필터 출력으로 획득된 소나 영상에 마코프랜덤필드(Markov random field)를 이용한 영상 분할 기법,[1] 잔향 신호의 통계적 특징을 이용한 컨트라스트 박스 탐지기와 물체 모양의 집합이론 개념을 기초로 한 영상처리 방법 중 하나인 모폴로지 탐지기를 순차적으로 적용하는 컨트라스트 박스-모폴로지 탐지 기법이 제안되었다.[2,3] 클러터와 표적을 시공간적인 특징을 이용하여 식별개념에서 구분하고자 다중 핑 소나 영상을 이용한 기법들이 제안되었다.[4,5] 또한 피크를 추출하기 위하여 신호크기 기반의 문턱값을 적용하여 피크를 추출하였으며,[6] 클러터들에 강인하다고 알려져 있는 추적 필터들을 이용하여 추적 성능을 향상하는 연구들이 많이 진행되었다.[7] 하지만 기존의 기법들은 피크 중심 영역에서 근본적으로 표적과 클러터를 구분하지 못한다. 즉, 문턱값을 넘는 동일한 피크 신호 크기에 대해서 표적과 클러터를 구분하지 못하는 단점이 있다.
따라서 본 논문에서는 단일 핑에서 피크 신호들의 중심 영역에서 표적과 클러터를 통계적 특징으로 식별하여 클러터를 제거하고 전체적인 탐지 및 추적 성능을 향상시키는 기법을 제안한다. II장은 고밀도 수중 클러터 환경에서 후처리 기법들을 기술하고, III장에서는 제안한 알고리즘에 대하여 설명한다. IV장에서는 실제 수중 표적을 이용한 해상데이터를 이용하여 제안한 알고리즘을 검증하며 V장에서는 결론을 기술한다.
II. 고밀도 클러터 환경에서의 후처리 기반 탐지 기법
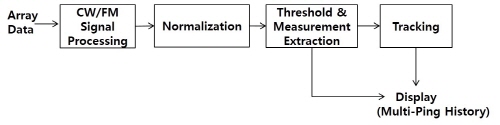
일반적인 능동소나 표적 탐지 및 추적 알고리즘은 Fig. 1과 같이 CW(Continuous Waveform) 신호와 FM(Frequency Modulation) 신호에 대해 신호처리를 수행하는 CW/FM signal processing, normalization, threshold & measurement extraction 그리고 tracking 으로 구분된다. CW/FM signal processing은 송신 신호 종류(CW/FM)에 따른 정합필터 처리를 수행하는 과정이며 normalization은 규준화하는 과정이다. 일반적으로 클러터 제거를 위한 후처리 기법들은 규준화 과정 전후에 이루어진다. 규준화된 데이터는 표적 추적을 위하여 거리-방위의 소나영상 데이터에 대하여 신호 크기 기반의 문턱값을 적용하여 문턱값보다 높은 신호 크기의 피크들을 추출한다. 추출된 피크신호 즉, 측정치들은 추적단에서 궤적초기화, 연계, 종료에 사용되며 또한 운용자에 의한 직접 탐지를 수행하기 위하여 화면에 전시된다.
일반적으로 정합필터를 거친 소나영상의 통계적 특성은 배경 잡음 신호만 존재하는 경우 Rayleigh 분포를 따르며 표적신호 및 클러터신호와 같은 반사신호가 존재하는 경우에는 Rice 분포를 가진다.[2,8] 기존의 컨트라스트 박스 탐지기는 Fig. 2와 같이 영역별 신호의 통계적 특징을 이용하여 구분한다.
또한 모폴로지 탐지기는 표적 신호가 잔향 신호에 비해 상대적으로 고립되어 나타나고 잔향신호는 클러터들이 근접하여 클러스터를 형성하며 표적의 신호대 잡음비가 커야 하는 가정하에 영상처리를 수행한다. 이러한 후처리 기법들은 단일 핑에서 오탐지율을 저하시키는 장점이 있으나 표적의 신호 영역과 잔향의 신호영역을 가정함으로 인해 표적 게이트 내에서 표적과 클러터의 구분이 어렵다는 단점이 있다. 이후 표적 추적을 위해 소나영상에서 문턱값을 적용하여 표적신호를 추출한다. 또한 다중 핑의 신호들을 누적하고 시공간적 연관성을 이용하여 클러터를 제거하는 후처리 기법들은 단일 핑의 탐지 능력에 의존하게 되므로 결국 단일 핑에서 클러터를 식별하여 제거하는 것이 가장 중요한 과제이다.
III. 단일 핑 클러터제거 알고리듬
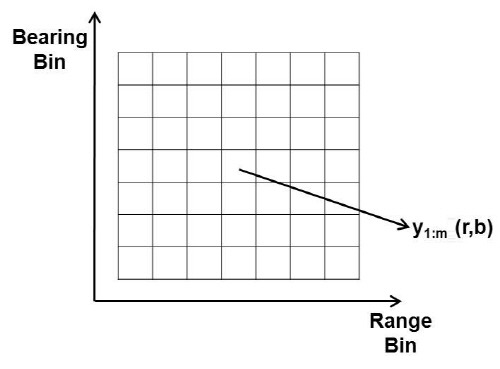
중주파수 능동소나에서의 주 대상이 되는 표적은 수십 미터의 길이에 해당하는 수중 표적이다. 즉, 수중 표적은 연속적인 체적과 같다. 이에 반해 클러터 신호들은 여러 해수면, 해저면, 수중 물체 등 수중 표적의 형상과 비교하여 다른 차이를 나타내며 기존 기법에서 가정한 잔향영역의 신호 또한 동일한 차이를 나타낸다. 본 논문에서는 이러한 특징을 이용하여 표적 게이트 영역을 Fig. 4와 같이 격자를 나누어 통계학적 특징정보를 추출하여 클러터를 제거하는 CPD(Cluster Peak Detection)기법을 제안한다. 즉 기존의 기법들처럼 표적영역과 잔향영역을 구분하지 않고 모든 소나영상의 피크 신호들에 대해 통계적 특징을 적용한다. 따라서 주변 게이트에 대한 가정이 불필요하다. 또한 동일한 신호크기의 경우 기존에는 표적과 클러터 신호를 구분하지 못하였으나 본 논문에서는 신호의 통계적 특징만 이용함으로 인해 신호크기가 동일한 표적과 클러터를 구분가능하게 한다.
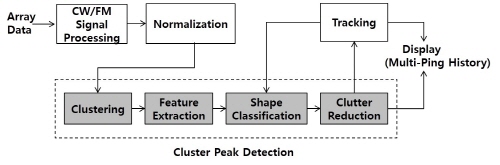
CPD 기법은 clustering, feature extraction, shape classification 그리고 clutter reduction으로 나누어진다. Clustering은 단일 핑에서 전 방위, 거리 영역에 대해 특징 정보를 추출할 위치를 찾는 과정으로서 문턱값 적용없이 최소 탐지 영역인 3 × 3 영역에서 중심 빈이 주변보다 큰 중심위치를 스캔하여 찾는다.
 (1)
(1)
이렇게 찾은 위치에서 집합  는 다음과 같으며
는 다음과 같으며  은 로컬피크의 개수이다.
은 로컬피크의 개수이다.
 (2)
(2)
Feature extraction은 로컬피크  를 중심으로
를 중심으로  개의 특징을 계산하는 과정이며 특징을 추출하기 위한 영역 및 데이터집합은 다음과 같다. 로컬피크
개의 특징을 계산하는 과정이며 특징을 추출하기 위한 영역 및 데이터집합은 다음과 같다. 로컬피크  로부터 영역 식별(
로부터 영역 식별( ), 즉 표적 게이트 크기는 피크의 SNR (Signal-to-Noise Ratio)이 주변 잡음과 유사해지는 수준까지로 설정한다. 예를 들어 7 × 7 영역까지 설정하는 경우, 위 영역에서
), 즉 표적 게이트 크기는 피크의 SNR (Signal-to-Noise Ratio)이 주변 잡음과 유사해지는 수준까지로 설정한다. 예를 들어 7 × 7 영역까지 설정하는 경우, 위 영역에서  의 중심위치 기준으로 중심위치값을 제외한 3 × 3(
의 중심위치 기준으로 중심위치값을 제외한 3 × 3( ) 영역 데이터(8개)의 집합을
) 영역 데이터(8개)의 집합을  (A영역), 중심위치 5 × 5(
(A영역), 중심위치 5 × 5( ) 영역 데이터에서 중심빈과
) 영역 데이터에서 중심빈과  집합 데이터를 제외한 데이터(16개)를 집합
집합 데이터를 제외한 데이터(16개)를 집합  (B영역), 중심위치 7 × 7(
(B영역), 중심위치 7 × 7( ) 영역 데이터에서 중심빈과
) 영역 데이터에서 중심빈과  ,
,  데이터 집합을 제외한 데이터(24개)를 집합
데이터 집합을 제외한 데이터(24개)를 집합  (C영역), 잡음 레벨은
(C영역), 잡음 레벨은 
 이 0.5 dB보다 작을 경우로 정의한다. 이를 일반화하면 다음과 같다.
이 0.5 dB보다 작을 경우로 정의한다. 이를 일반화하면 다음과 같다.
Feature extraction에서 표적과 클러터의 통계적 특징을 추출하는 단계로서 에코의 형상을 고려하여 다음의 2가지 특징인자를 추출한다.
1.  영역간의 메디안 값 비율
영역간의 메디안 값 비율
2.  영역의 분산값
영역의 분산값
즉, 로컬피크  와 영역 데이터 집합
와 영역 데이터 집합  로부터
로부터  개의 특징을 추출한다.
개의 특징을 추출한다.  개의 특징은
개의 특징은  영역 데이터 집합 간의 메디안값의 비율, 그리고
영역 데이터 집합 간의 메디안값의 비율, 그리고  영역 데이터 집합의 분산값을 나타낸다.
영역 데이터 집합의 분산값을 나타낸다.
 (4)
(4)
 (5)
(5)
Shape classification은  개의 특징 정보와 문턱값을 이용하여 클러터와 표적을 분리한다.
개의 특징 정보와 문턱값을 이용하여 클러터와 표적을 분리한다.  개의 로컬피크들에 대해 feature extraction 과정을 통하여 추출된
개의 로컬피크들에 대해 feature extraction 과정을 통하여 추출된  개의 특징 정보들은 각각 선형분류기를 이용하여 표적신호와 클러터신호로 분류한다. Clutter reduction은 분류된 클러터와 표적 신호에서 클러터 신호를 제거하고 남은 신호를 추적단과 운용자 화면으로 전달한다.
개의 특징 정보들은 각각 선형분류기를 이용하여 표적신호와 클러터신호로 분류한다. Clutter reduction은 분류된 클러터와 표적 신호에서 클러터 신호를 제거하고 남은 신호를 추적단과 운용자 화면으로 전달한다.
IV. 해상데이터 분석
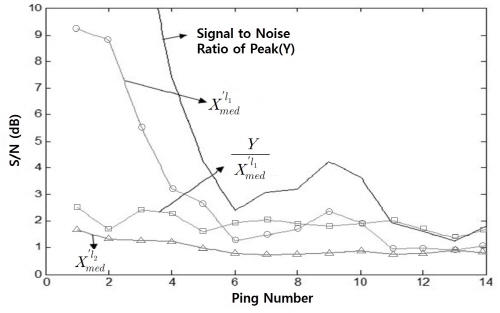
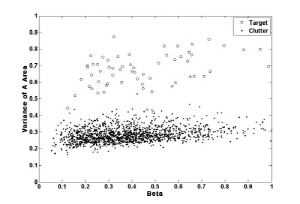
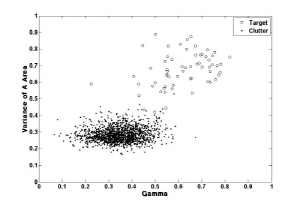
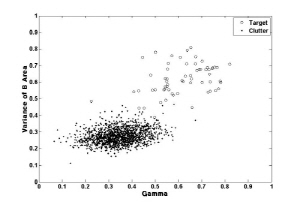
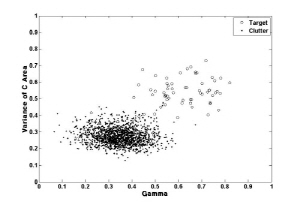
Figs. 6 ~ 14는 해상에서 실제 표적을 이용하여 도출된 각 특징들의 상관도를 보여준다. 전 방위에 대해 100개 이상의 빔 출력 신호를 얻으며 표적의 크기, 위치, 신호의 인접빔에 존재여부를 고려하여 방위격자는 최대 ‘7’로 정하고 거리는 표적 길이의 절반 정도 이하에 해당하는 크기로서 격자를 최대 ‘7’ 로 정하였다. 따라서  영역인 최대 7 × 7 영역에서 특징정보를 추출하고 CPD 기법을 적용하였다. Fig. 5에서 보는 바와 같이 피크 신호 크기가 낮아져 주변 잡음 신호와 유사해지더라도 피크의 중심 영역 즉,
영역인 최대 7 × 7 영역에서 특징정보를 추출하고 CPD 기법을 적용하였다. Fig. 5에서 보는 바와 같이 피크 신호 크기가 낮아져 주변 잡음 신호와 유사해지더라도 피크의 중심 영역 즉,  영역의 중심값 비율은 일정한 값을 보여준다. 이는 피크 신호의 크기에 따라
영역의 중심값 비율은 일정한 값을 보여준다. 이는 피크 신호의 크기에 따라  영역의 크기를 조절할 수 있음을 보여준다. 피크 중심 영역으로부터의 메디안값 비율 정보를 각각
영역의 크기를 조절할 수 있음을 보여준다. 피크 중심 영역으로부터의 메디안값 비율 정보를 각각  ,
,  ,
,  로 표현할 때 클러터와 표적의 신호 구분이 가능함을 알 수 있다. 다수의 표적 점들은 핑 누적 처리 결과다.
로 표현할 때 클러터와 표적의 신호 구분이 가능함을 알 수 있다. 다수의 표적 점들은 핑 누적 처리 결과다.
|
Fig. 5. Feature of peak area (sea trial data). |
|
Fig. 6. Scatter diagram of |
|
Fig. 7. Scatter diagram of |
|
Fig. 8. Scatter diagram of |
 and
and  (sea trial data).
(sea trial data).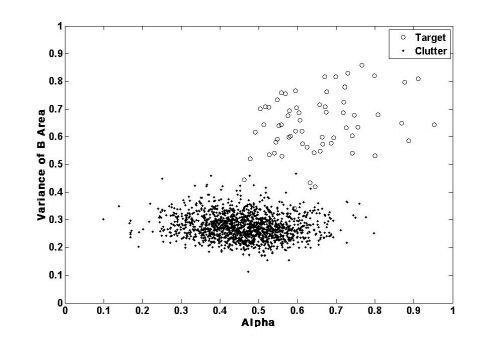
 and
and  (sea trial data).
(sea trial data).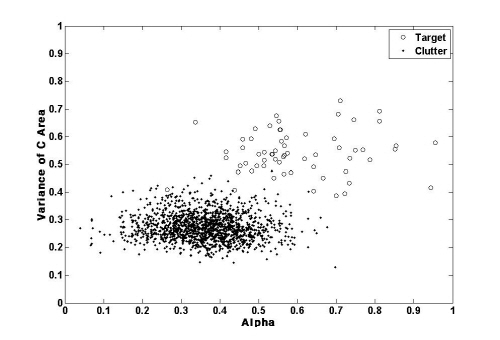
 and
and  (sea trial data).
(sea trial data).Figs. 15와 16은 기동하는 표적에 대해 문턱값 기반 기법 적용과 CPD 기법 적용결과를 약 80핑 이상 핑누적으로 비교한 그림이다. 표적이 약 6 kyd에서 처음 탐지되어 자함으로 접근하는 기동 시나리오이며 점이 추출된 피크 신호를 나타낸다. 기존 기법과 비교하여 CPD 기법 적용 시 많은 피크 신호들이 줄어든 것을 확인 할 수 있다. 또한, 본 논문에서는 빔과 거리 해상도 및 탐지하고자 하는 표적의 크기를 고려하여 7 × 7 격자를 설정하였으며, 격자 크기는 소나 시스템의 설계 사양과 탐지 목표 표적의 크기에 따른 설계 파라미터이다.
 and
and  (sea trial data).
(sea trial data). and
and  (sea trial data).
(sea trial data).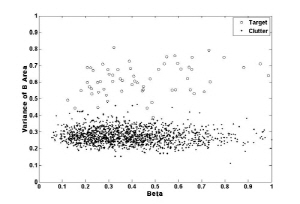
 and
and  (sea trial data).
(sea trial data). and
and  (sea trial data).
(sea trial data).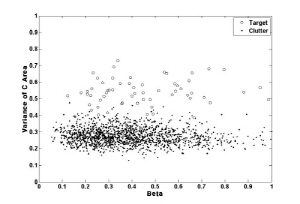
 and
and  (sea trial data).
(sea trial data). and
and  (sea trial data).
(sea trial data).
|
Fig. 15. Conventional algorithm result (sea trial data). |
|
Fig. 16. CPD algorithm result (sea trial data). |
|
Fig. 17. Clutter reduction result (sea trial data). |
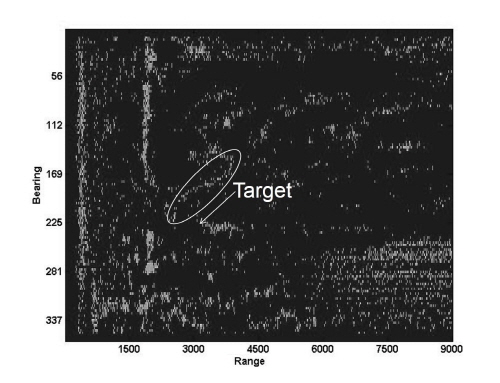
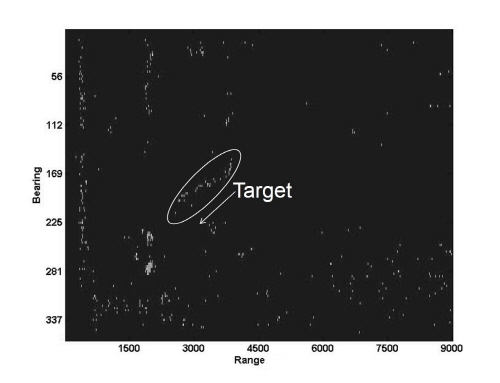
Fig. 17은 기존 문턱값 기반 기법과 CPD 기법 적용 결과에 대해 핑 별로 클러터 개수를 나타낸 것이다. 기존 기법 적용 시 약 300개 이상 클러터가 발생하였으나 CPD 기법 적용 시 약 40개 이하로 줄었다. 기존 문턱값 기반 기법은 문턱값 설정에 따라 영향을 받으므로 CPD기법과 비교하여 표적의 피크가 동일하게 탐지되는 최소 문턱값으로 설정하여 비교하였다.
