

I. 서 론
II. 공간상관성의 정의
III. 공간상관성에 의한 배열이득
IV. 신호 및 소음의 공간상관성
4.1 신호의 공간상관성
4.2 소음의 공간상관성
V. 해상 실험
VI. 실험 결과
VII. 결 론
I. 서 론
해양에서 배열센서를 사용하여 음향신호를 수신하는 경우 개별센서를 사용하는 경우와 달리 배열이득(Array Gain, AG)이 발생한다. 배열이득은 다 수의 센서가 배열을 이루는 경우 발생하는 이득으로 개별센서 SNR(Signal to Noise Ratio)과 배열센서 SNR의 비로 계산할 수 있다.[1]
신호가 단일 방향에서 평면파로 수신되고, 센서의 배열에 따른 완벽한 상관관계인 조건에서 등방성 소음에 대한 배열이득을 계산하면 지향지수(Directivity Index, DI)와 동일하며, 센서의 수가  인 경우
인 경우 
 이 된다.[1,2] 하지만 균등간격인 선 배열센서에서 중심주파수가 아닌 주파수 대역의 신호가 수신되는 경우와 배열센서의 형상이 균등간격이 아닌 경우, 방향성 소음이 발생하는 경우 등과 같이 배열센서와 신호의 상관관계가 달라지는 조건에서 배열이득은
이 된다.[1,2] 하지만 균등간격인 선 배열센서에서 중심주파수가 아닌 주파수 대역의 신호가 수신되는 경우와 배열센서의 형상이 균등간격이 아닌 경우, 방향성 소음이 발생하는 경우 등과 같이 배열센서와 신호의 상관관계가 달라지는 조건에서 배열이득은  과 다르게 변화된다.[2]
과 다르게 변화된다.[2]
해양에는 다양한 형태의 소음이 존재한다. 그러므로 배열센서를 사용하는 경우 배열이득을 예측하는 것은 쉽지 않다. 일반적으로 배열이득은 SNR에 의해 계산되므로, 신호 및 소음을 측정해야 한다. 하지만 탐지 등과 같은 목적으로 배열센서를 운용하기 위해서는 배열이득 예측이 필요하다.
본 논문에서는 소음 환경이 변동하는 경우 배열이득의 변화를 예측하기 위하여 공간상관성에 대한 연구를 수행하였다. 공간상관성은 상호상관에 대한 공간적인 개념으로, 정규화된 시공간 상관관계에서 시지연이 0인 경우이고, 소음의 형태에 따라 변화하게 된다.[3] 이에 대하여 Smith[4]는 다중경로 또는 다중모드 채널에서 공간상관성의 변화를 모델링하였고, Sloboda와 Manness[5]는 반원형의 소음 환경에서 공간상관성을 수식적으로 정리, Buckingham와 Carbone[6]은 음원의 깊이 및 소음의 형태에 따른 공간상관성의 변화를 연구, Habets[7, 8]는 등방성 소음을 생성하여 공간상관성을 이용한 검증, Walker[9-11]는 모델링에 의해 3차원 공간에서 소음의 방향성 형태에 대한 공간상관성 및 상호상관을 계산하는 등 해양에서 공간상관성에 대한 연구가 이루어져 왔다.
방향성 소음 환경의 배열이득에 대한 연구는 Burdic[2]이 해수면 소음이 발생하는 환경에서 균등간격으로 구성된 수직 선 배열센서의 배열이득을 수식적으로 정리하였다. 이와 동일한 소음환경에서 공간상관성을 이용하여 배열이득을 계산하는 연구의 내용이 발표되었고,[12,13] 등방성 소음의 환경에서 공간상관성을 이용하여 다양한 형상의 배열센서에 대한 배열이득을 연구한 내용이 발표된 바 있다.[14]
본 논문에서는 공간상관성을 이용하여 비균등간격 배열센서의 배열이득을 계산하는 연구를 진행하였다. 공간상관성의 특성을 이용하면 소음의 방향성 세기, 배열센서의 형상, 빔 조향 방위에 대한 세 가지 정보만으로 배열이득을 도출할 수 있다. 이를 검증을 위해 해상 실험을 수행하였다. 실험선에서 저주파 음원을 예인하며 605 Hz의 CW를 송신하였고, 함께 측정된 소음과 함께 SNR에 의한 배열이득을 계산하였다. 동일한 환경에서 측정된 소음의 방향성 세기를 적용하여 공간상관성을 계산하였으며, SNR에 의한 배열이득과 비교 및 분석을 수행하였다.
본 논문의 구성은 다음과 같다. II장에서는 공간상관성의 정의 및 수식적인 개념에 대해 정리하고, III장에서는 공간상관성을 배열센서에 적용하여 배열이득을 계산하는 과정에 대해 설명한다. IV장에서는 배열센서에서 신호 및 소음의 공간상관성을 계산하고, V장에서는 해상실험 방법 및 해양환경 조건을 설명하며, VI장에서는 SNR에 의한 배열이득과 공간상관성에 의한 배열이득을 비교한다. 마지막으로 VII 장에서는 본 논문의 결론을 맺는다.
II. 공간상관성의 정의
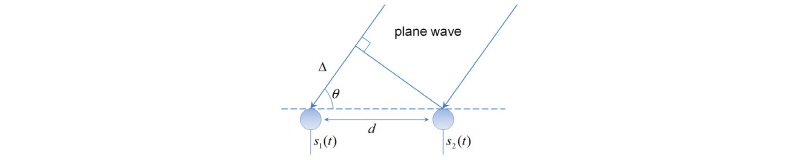
두 센서에서 수신되는 신호는 시간 또는 공간적인 상관관계를 가지고 있다. Fig. 1과 같이 무지향성의 두 센서에 평면파가  방향에서 수신되는 경우
방향에서 수신되는 경우  와
와  의 신호는
의 신호는  의 시지연이 발생한다.
의 시지연이 발생한다.  는 센서의 간격
는 센서의 간격  와 수신 방위
와 수신 방위  , 음속
, 음속  의 관계로 결정되며, 이는
의 관계로 결정되며, 이는  가 된다. 만약
가 된다. 만약  가 0이 되는 경우 상관성이 가장 높아지고, 상호상관 함수는 1이 된다.[3]
가 0이 되는 경우 상관성이 가장 높아지고, 상호상관 함수는 1이 된다.[3]
두 센서에 수신되는 신호의 시간에 대한 상호상관 함수는 Eq. (1)과 같다.
 , (1)
, (1)
여기서  로 표기된 오버바(overbar)는 앙상블 평균이다.
로 표기된 오버바(overbar)는 앙상블 평균이다.  와
와  를 시간
를 시간  의 변화에 따라 앙상블 평균을 하게 되면 상호상관 함수가 계산되고, Eq. (2)와 같이
의 변화에 따라 앙상블 평균을 하게 되면 상호상관 함수가 계산되고, Eq. (2)와 같이  에 대하여 푸리에 변환을 하면 주파수 영역의 상호 스펙트럼밀도 함수가 된다.
에 대하여 푸리에 변환을 하면 주파수 영역의 상호 스펙트럼밀도 함수가 된다.
 , (2)
, (2)
여기서 *는 켤레복소수를 나타낸다. Eq. (2)와 같이 상호 스펙트럼밀도 함수는 신호의 주파수 영역에서 한 신호의 켤레복소수와 다른 신호의 곱과 동일하다. 만약 평면파가 수신되는 경우 한 센서에 대한 상호 스펙트럼밀도 함수인  와 두 센서에 대한 상호 스펙트럼밀도 함수인
와 두 센서에 대한 상호 스펙트럼밀도 함수인  는 Eq. (3)과 같은 관계를 가진다.
는 Eq. (3)과 같은 관계를 가진다.
 . (3)
. (3)
Fig. 1과 같이 평면파가 수신되는 경우 두 센서 간의 상호 스펙트럼밀도 함수  는 한 센서에 대한 상호 스펙트럼밀도 함수
는 한 센서에 대한 상호 스펙트럼밀도 함수  에서
에서  만큼 시지연 된 것과 동일하다. 이를 이용하여 두 센서 간의 상호 스펙트럼밀도 함수를 Eq. (4)와 같이 정규화 할 수 있다.
만큼 시지연 된 것과 동일하다. 이를 이용하여 두 센서 간의 상호 스펙트럼밀도 함수를 Eq. (4)와 같이 정규화 할 수 있다.
 . (4)
. (4)
앞서 설명된 시간에 대한 상호상관 함수를 3차원 공간으로 확장하면 센서 간의 시공간 상관 함수를 Eq. (5)와 같이 정리할 수 있다.
 . (5)
. (5)
Eq. (5)는 구형좌표계에서 시간 및 공간의 변화에 따른 상관성을 나타낸 것이다. Eq. (1)과 달리 수평각  와 수직각
와 수직각  에 대하여 공간상 거리
에 대하여 공간상 거리  가 고려되었고, 거리 변화
가 고려되었고, 거리 변화  에 따른 상관성을 나타낸다. Eq. (6)과 같이 센서 간의 시공간 상관 함수를 푸리에 변환하면 상호 스펙트럼밀도 함수가 계산된다.
에 따른 상관성을 나타낸다. Eq. (6)과 같이 센서 간의 시공간 상관 함수를 푸리에 변환하면 상호 스펙트럼밀도 함수가 계산된다.
 . (6)
. (6)
만약 고정된 시간에서 한 센서에 대한 시공간 상관함수 즉, 시간 변수  및 공간 변수
및 공간 변수  를 0으로 가정한다면
를 0으로 가정한다면  와 같아진다. 여기서
와 같아진다. 여기서  을 푸리에 변환하여 상호 스펙트럼밀도 함수를 계산하는 경우
을 푸리에 변환하여 상호 스펙트럼밀도 함수를 계산하는 경우  와
와  가 무의미해 지므로, 소거되어
가 무의미해 지므로, 소거되어  로 표현할 수 있다. 이를 이용하여 Eq. (4)와 같이 상호 스펙트럼밀도 함수를 정규화 한다면 Eq. (7)과 같다.
로 표현할 수 있다. 이를 이용하여 Eq. (4)와 같이 상호 스펙트럼밀도 함수를 정규화 한다면 Eq. (7)과 같다.
 . (7)
. (7)
Cox[3]는 시공간 상관 함수에서 공간의 변화만 고려하기 위하여 시지연  를 0으로 가정하였고, Eq. (7)을 단색 톤
를 0으로 가정하였고, Eq. (7)을 단색 톤  에 대하여 정리하면 Eq. (8)과 같아진다.
에 대하여 정리하면 Eq. (8)과 같아진다.
 . (8)
. (8)
이는 시간이 고정된 경우 공간의 변화에 따른 상관 함수 계수를 나타내고, Eq. (8)과 같이 정규화된 시공간 상관 함수의 실수부를 공간상관성이라고 한다.
III. 공간상관성에 의한 배열이득
본 논문에서는 공간상관성을 이용한 배열이득을 계산하기 위하여, 소음의 방향성 세기 및 빔 조향 방위에 대한 공간상관성을 계산하는 과정을 연구하였다. 우선 이를 위해 각 센서에 대한 공간상관성을 계산해야 한다. 만약 배열의 수가  개인 경우 각 센서에 수신되는 신호의 주파수 성분을 Eq. (9)와 같이 열벡터
개인 경우 각 센서에 수신되는 신호의 주파수 성분을 Eq. (9)와 같이 열벡터  로 구성할 수 있다.
로 구성할 수 있다.
 . (9)
. (9)
이를 이용하여 Eq. (10)과 같이 계산하면 CSDM (Cross- Spectral Density Matrix)이 된다.
 , (10)
, (10)
여기서  는 허미션 전치(Hermitian transpose)이다. 행렬
는 허미션 전치(Hermitian transpose)이다. 행렬  의 각 성분은 센서 간의 상호 스펙트럼밀도가 된다. 행렬
의 각 성분은 센서 간의 상호 스펙트럼밀도가 된다. 행렬  의 각 성분을 정규화 하여 실수부를 계산하면 Eq. (8)과 같이 공간상관성이 계산된다. 이는 각 센서에 대한 공간상관성이 되고, Eq. (11)와 같이 계산할 수 있다.
의 각 성분을 정규화 하여 실수부를 계산하면 Eq. (8)과 같이 공간상관성이 계산된다. 이는 각 센서에 대한 공간상관성이 되고, Eq. (11)와 같이 계산할 수 있다.
 . (11)
. (11)
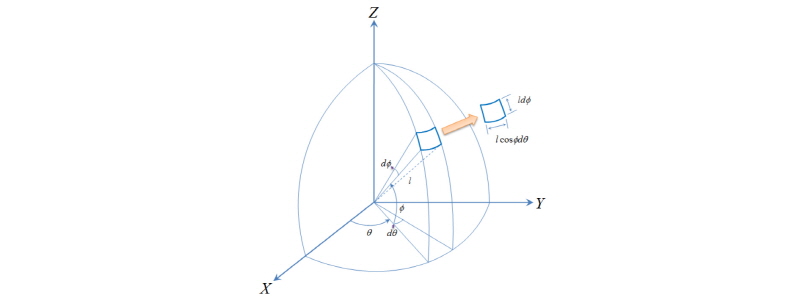
Eq. (11)은 Habets[7]와 같이 주파수 영역에 대한 공간상관성을 나타내기 위하여, 구형좌표계의 면적에 대하여 적분하였다. 여기서 사용된 구형좌표계는 Fig. 2와 같고, x축을 기준으로 수평각  와 수직각
와 수직각  를 설정하였다.
를 설정하였다.
Urick[1]은 상호상관계수를 이용하여 배열이득을 계산하는 수식을 언급하였다. 이와 같은 방법을 이용하여 공간상관성에 의한 배열이득을 계산할 수 있다. 배열이득을 계산하기 위하여 Eq. (12)와 같이 각 센서에 대한 공간상관성을 모두 합한다.
 . (12)
. (12)
Eq. (12)를 이용하여 신호 및 소음에 대한 공간상관성을 계산하고, Eq. (13)과 같이 계산하면 배열이득이 된다.
 , (13)
, (13)
여기서  는 신호의 공간상관성이고,
는 신호의 공간상관성이고,  는 소음의 공간상관성이다. 이와 같이 신호 및 소음의 공간상관성을 이용하여 배열센서에 대한 배열이득을 계산할 수 있다. 만약 공간상관성에 빔 조향에 대한 수식을 추가하게 된다면, 빔 조향에 의한 배열이득을 계산할 수 있을 것이다. 이를 위해 수신되는 신호를 평면파로 가정하게 되면 Eq. (11)은 Eq. (3)에 의해 Eq. (14)와 같이 표현할 수 있다.
는 소음의 공간상관성이다. 이와 같이 신호 및 소음의 공간상관성을 이용하여 배열센서에 대한 배열이득을 계산할 수 있다. 만약 공간상관성에 빔 조향에 대한 수식을 추가하게 된다면, 빔 조향에 의한 배열이득을 계산할 수 있을 것이다. 이를 위해 수신되는 신호를 평면파로 가정하게 되면 Eq. (11)은 Eq. (3)에 의해 Eq. (14)와 같이 표현할 수 있다.
 , (14)
, (14)
여기서  은 센서
은 센서  과 센서
과 센서  의 상대적인 거리이다. 만약 구형좌표계를 고려한다면, 배열의 각 센서에 대한 위치
의 상대적인 거리이다. 만약 구형좌표계를 고려한다면, 배열의 각 센서에 대한 위치  를 Eq. (15)와 같이 x, y, z축에 대한
를 Eq. (15)와 같이 x, y, z축에 대한  ,
,  ,
,  의 열벡터로 설정할 수 있다.
의 열벡터로 설정할 수 있다.
 , (15)
, (15)
여기서  ,
,  ,
,  는 좌표계에서
는 좌표계에서  개의 배열센서에 대한 x, y, z축의 위치이다. 이를 이용하여 구형좌표계에서 수평각
개의 배열센서에 대한 x, y, z축의 위치이다. 이를 이용하여 구형좌표계에서 수평각  와 수직각
와 수직각  에 대한 위상을 Eq. (16)과 같이 표현할 수 있다.
에 대한 위상을 Eq. (16)과 같이 표현할 수 있다.

 , (16)
, (16)
여기서  는 음속이다. 만약 Eq. (17)과 같이 배열에서 각 센서의 위상을 행렬로 계산할 수 있고, 각 성분은 센서 간의 방위별 위상이 된다.
는 음속이다. 만약 Eq. (17)과 같이 배열에서 각 센서의 위상을 행렬로 계산할 수 있고, 각 성분은 센서 간의 방위별 위상이 된다.
 . (17)
. (17)
 는 구형좌표계에서 Eq. (17)의
는 구형좌표계에서 Eq. (17)의  와 동일하게 된다. 만약 수평각
와 동일하게 된다. 만약 수평각  와 수직각
와 수직각  로 빔 조향하는 경우, 이를 고려한다면 배열센서의 수평각
로 빔 조향하는 경우, 이를 고려한다면 배열센서의 수평각  와 수직각
와 수직각  에 대한 위상은 Eq. (18)과 같이 수정할 수 있다.
에 대한 위상은 Eq. (18)과 같이 수정할 수 있다.

 , (18)
, (18)
Eq. (18)과 같이 위상  에서 빔 조향에 대한 수식을 고려할 수 있다. 이와 같이 빔 조향을 하는 경우 주파수 영역에서 배열센서 간에 위상을 변화 시킬 수 있고, 이를
에서 빔 조향에 대한 수식을 고려할 수 있다. 이와 같이 빔 조향을 하는 경우 주파수 영역에서 배열센서 간에 위상을 변화 시킬 수 있고, 이를  으로 표현할 것이다.
으로 표현할 것이다.
추가적으로  은 각 센서에서 방위에 따른 신호의 세기가 된다. 신호의 경우 배열센서에 수신되는 방위는 단일 방향이 되지만, 소음의 경우 방위에 따른 세기가 달라질 수 있다. 그러므로 소음에 대한 공간상관성을 계산하는 경우
은 각 센서에서 방위에 따른 신호의 세기가 된다. 신호의 경우 배열센서에 수신되는 방위는 단일 방향이 되지만, 소음의 경우 방위에 따른 세기가 달라질 수 있다. 그러므로 소음에 대한 공간상관성을 계산하는 경우  대신 소음의 방향성 세기를 적용할 수 있다. 이로써 배열센서에 대하여 소음의 방향성을 고려하여 빔 조향에 의한 배열이득을 계산할 수 있게 된다.
대신 소음의 방향성 세기를 적용할 수 있다. 이로써 배열센서에 대하여 소음의 방향성을 고려하여 빔 조향에 의한 배열이득을 계산할 수 있게 된다.
IV. 신호 및 소음의 공간상관성
4.1 신호의 공간상관성
배열센서에 수신되는 신호가 Fig. 2와 같은 구형좌표계에서 특정 수평각  와 수직각
와 수직각  의 방위로부터 수신되는 경우, 센서 간의 상호 스펙트럼밀도 함수
의 방위로부터 수신되는 경우, 센서 간의 상호 스펙트럼밀도 함수  은
은  와
와  이외의 방위에서 0이 된다. 그러므로 센서 간의 상호 스펙트럼밀도 함수를
이외의 방위에서 0이 된다. 그러므로 센서 간의 상호 스펙트럼밀도 함수를  으로 표현할 수 있다. 이를 이용하여
으로 표현할 수 있다. 이를 이용하여  와
와  의 방위에서 수신되는 신호에 대한 공간상관성을 Eq. (19)과 같이 정리하였다.
의 방위에서 수신되는 신호에 대한 공간상관성을 Eq. (19)과 같이 정리하였다.

 . (19)
. (19)
Eq. (19)에서  과
과 
 은
은  와
와  에 대하여 독립적이므로, Eq. (20)과 같이 정리된다.
에 대하여 독립적이므로, Eq. (20)과 같이 정리된다.

 . (20)
. (20)
Eq. (20)에서 센서  과 센서
과 센서  의 상대적인 거리
의 상대적인 거리  을 구형좌표계의 x, y, z축에 대해 변환하고, 수평각
을 구형좌표계의 x, y, z축에 대해 변환하고, 수평각  와 수직각
와 수직각  에 대해 빔 조향하는 경우 수신 신호에 대한 공간상관성을 Eq. (21)과 같이 정리할 수 있다.
에 대해 빔 조향하는 경우 수신 신호에 대한 공간상관성을 Eq. (21)과 같이 정리할 수 있다.



 . (21)
. (21)
신호가 수신되는 방위로 빔 조향하는 경우, 즉  ,
,  가 되면 Eq. (21)에 의해 수신 신호에 대한 센서 간의 공간상관성
가 되면 Eq. (21)에 의해 수신 신호에 대한 센서 간의 공간상관성  은 항상 1이 된다. 이로 인해 평면파로 수신되는 경우
은 항상 1이 된다. 이로 인해 평면파로 수신되는 경우  을 Eq. (12)와 같이 센서 간에 공간상관성을 모두 합한다면
을 Eq. (12)와 같이 센서 간에 공간상관성을 모두 합한다면  이 된다. 만약 평면파가 수신되는 원거리 음장조건이 아닌 근거리 음장조건에서는 신호의 공간상관성이 달라질 수 있을 것이다.
이 된다. 만약 평면파가 수신되는 원거리 음장조건이 아닌 근거리 음장조건에서는 신호의 공간상관성이 달라질 수 있을 것이다.
4.2 소음의 공간상관성
해양에 존재하는 소음의 형태는 대부분 방향성이 존재한다. 방향성 소음은 단위 입체각 당 신호의 세기가 모두 달라지므로 센서 간의 공간상관성은 Eq. (22)와 같이  와
와  에 대하여 독립적인 변수가 존재하지 않는다.
에 대하여 독립적인 변수가 존재하지 않는다.

 , (22)
, (22)
여기서  은 한 센서에 대한 상호 스펙트럼밀도 함수이므로 방향에 따른 세기가 되고, 만약 평면파로 가정한다면
은 한 센서에 대한 상호 스펙트럼밀도 함수이므로 방향에 따른 세기가 되고, 만약 평면파로 가정한다면  과 동일하다. 그러므로 방향성 소음에 대한 공간상관성을 계산하는 경우
과 동일하다. 그러므로 방향성 소음에 대한 공간상관성을 계산하는 경우  을 소음의 방향성 세기
을 소음의 방향성 세기  으로 수정할 수 있다. 추가적으로 빔 조향에 대한 수식을 고려한다면,
으로 수정할 수 있다. 추가적으로 빔 조향에 대한 수식을 고려한다면,  를
를  으로 수정하여 Eq. (23)과 같이 표현할 수 있다.
으로 수정하여 Eq. (23)과 같이 표현할 수 있다.
 . (23)
. (23)
이와 같이 소음의 방향성 세기를 고려하여 빔 조향 방위에 대한 공간상관성을 계산할 수 있고, 이에 대한 배열이득을 도출할 수 있다. 이것은 소음의 형태를 알고 있는 경우, 공간상관성을 사용하여 배열센서의 형상 및 빔 조향 방위에 대한 배열이득을 추정할 수 있음을 의미한다.
V. 해상 실험
실험에 사용된 배열센서는 Fig. 3과 같이 비균등간격 선 배열센서형태의 DHLA(Deployable Horizontal Line Array)를 사용하였다. DHLA는 100, 200, 400, 800 Hz의 각 중심 주파수에 대하여 9개의 센서가  간격으로 부배열을 구성하고, 각 부배열이 기하학적으로 배치되어 있다. 그리고 전체 센서의 수는 21개이다. DHLA를 수평 선 배열센서로 사용하였고, 설치된 해양의 수심은 약 100 m 내외로 해저가 평탄한 지역이다. 이에 대한 음속 분포는 Fig. 4와 같다.
간격으로 부배열을 구성하고, 각 부배열이 기하학적으로 배치되어 있다. 그리고 전체 센서의 수는 21개이다. DHLA를 수평 선 배열센서로 사용하였고, 설치된 해양의 수심은 약 100 m 내외로 해저가 평탄한 지역이다. 이에 대한 음속 분포는 Fig. 4와 같다.
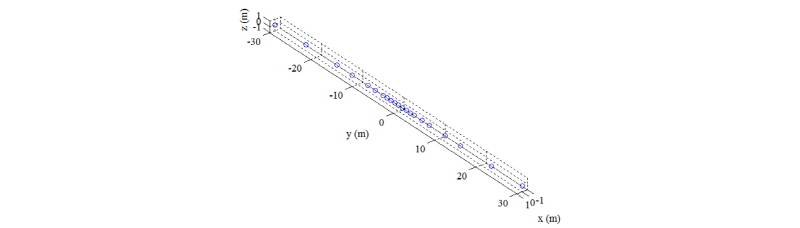
Fig. 4의 수심별 음속 분포는 CTD(Conductive, Tem-perature, Depth)로 측정하였고, 수평 선 배열센서가 설치된 해저의 음속은 약 1508 m/s이다. 이에 대하여 15개의 지점에서 저주파 음원을 이용하여 CW를 송신하였다. 실험에 대한 GPS(Global Positioning System)을 이용하여 Fig. 5와 같이 수평 선 배열센서 및 음원의 위치를 도식화하였다.
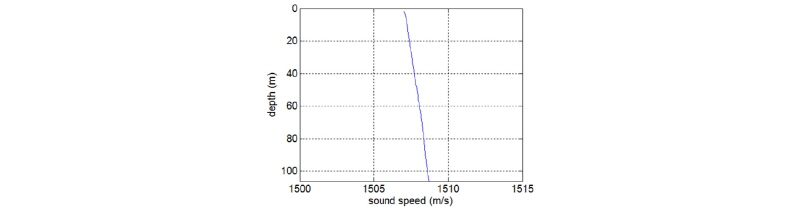
Fig. 5에서 실선은 수평 선 배열센서의 위치이고, 해저에 설치되었다. 원은 신호의 송신 시간에 따른 음원의 위치로, 각 위치에서 실험선에 저주파 음원을 예인하며 CW를 송신하였다. 본 논문에서 비균등간격의 배열센서인 DHLA에서 부배열에 대한 중심 주파수가 아닌 주파수의 배열이득을 계산하고, 이를 검증하기 위하여 임의로 설정한 주파수 605 Hz의 CW 신호를 사용하였다.
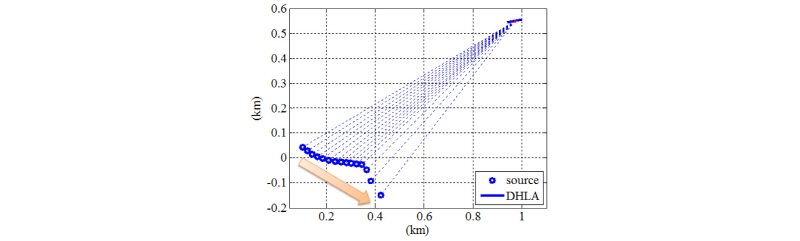
배열이득이 소음의 방향성 형태에 따라 변하게 되므로 실험선에 대한 소음 영향을 줄이기 위하여 기동을 멈추었고, 조류에 의해 화살표 방향으로 실험선이 이동되어졌다. 실험선의 프로펠러를 가동하지 않았기 때문에 그에 따른 소음은 발생하지 않았지만, 실험선 엔진의 구동을 완전히 멈출 수 없어서 엔진에 의한 소음이 발생된 것으로 생각된다. 실험을 수행하는 중에는 실험선 외에 주변에 선박이 존재 하지 않았으며, 실험을 수행한 지역의 시간에 따른 평균적인 주변 소음은 주파수 605 Hz에서 약 75 dB로 측정되었다.
사용된 신호는 10 s 길이의 CW를 30 s 주기로 15회 동안 송신하였고, 이에 대한 음원의 위치를 도식화한 원의 간격은 30 s가 된다. CW를 12회 송신하는 시점부터 실험선의 엔진을 가동하고 기동을 시작하였으며, 이와 같이 음원의 경로가 변경되는 것을 확인할 수 있다. CW의 송신 형태는 Fig. 6과 같다.

CW를 10 s 동안 송신하고 난 뒤 20 s 후 다시 CW를 10 s 동안 송신하는 형태로 30 s의 주기로 반복하였다. 이와 같은 형태로 송신한 이유는 실험을 수행하는 지역이 선박의 운행이 잦은 곳으로 소음의 형태가 수시로 변하기 때문에 CW의 직전에 수신된 소음을 이용하여 방향성 소음의 세기를 계산하기 위함이다. 이로써 Fig. 6과 같이 CW의 직전에 대한 10 s는 소음, CW의 10 s는 신호로 설정하여 분석하였다.
VI. 실험 결과
SNR에 의한 배열이득과 공간상관성에 의한 배열이득을 CW 신호의 주파수인 605 Hz에 대하여 계산하였고, 비교 및 분석을 수행하였다. SNR에 의한 배열이득은 음원의 방위로 빔 조향하고, 윈도우 사이즈  에 대한 Welch의 방법를 적용하여 신호와 소음의 파워스펙트럼 밀도를 계산하였다. 그리고 배열 및 개별 센서의 신호와 소음의 파워 비에 따른 배열이득을 계산하였다. 공간상관성에 의한 배열이득은 소음의 방향성 세기로부터 공간상관성을 도출하여 계산하였다. 여기서 데이터 결과 분석에 대한 설명을 편리하게 하기 위하여 30 s의 주기로 10 s의 CW를 송신한 것을 하나의 이벤트로 명명한다.
에 대한 Welch의 방법를 적용하여 신호와 소음의 파워스펙트럼 밀도를 계산하였다. 그리고 배열 및 개별 센서의 신호와 소음의 파워 비에 따른 배열이득을 계산하였다. 공간상관성에 의한 배열이득은 소음의 방향성 세기로부터 공간상관성을 도출하여 계산하였다. 여기서 데이터 결과 분석에 대한 설명을 편리하게 하기 위하여 30 s의 주기로 10 s의 CW를 송신한 것을 하나의 이벤트로 명명한다.
주파수 605 Hz에 대한 소음의 방향성 세기는 Fig. 7과 같다. 여기서 수평 선 배열센서를 사용하였으므로, 배열센서의 축 방향  °로 방향성 세기가 대칭이 되므로 수평각
°로 방향성 세기가 대칭이 되므로 수평각  에 대하여 도식화 하였다.
에 대하여 도식화 하였다.
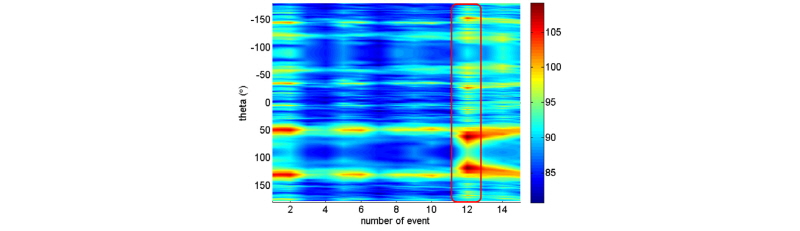
Fig. 7과 같이 이벤트에 따라 소음의 방향성이 변화하는 것을 확인할 수 있다. 실험선의 엔진을 완전히 중지하지 않았기 때문에 실험선이 위치한 수평각 120~130°에서 다른 방위보다 비교적 강한 소음이 수신되었다. 그리고 실험선이 기동하기 시작하는 12번째 이벤트의 실험선 방위에서 강한 소음이 수신되는 것을 확인하였다. 그리고 선 배열센서를 사용하였기 때문에 축 방향인 ± 90°를 중심으로 소음의 방향성 세기가 대칭이 되는 것을 확인할 수 있다.
Fig. 7의 이벤트에 따른 소음의 방향성 세기를 Eq. (23)에 적용하고, 거리 0 m부터 60 m까지 0.9375 m 간격 마다 공간상관성을 Fig. 8과 같이 계산하였다. 이와 같이 공간상관성을 계산한 이유는 배열이득을 계산하기 위하여 Eq. (12)와 같이 센서의 각 배열에 따른 공간상관성을 모두 합해야 하는데, DLHA는 비균등 간격으로 구성되어 각 센서 간의 상대적인 거리가 모두 다르므로 이를 고려하여 계산하기 위함이다. 그러므로 Fig. 8에서 거리는 공간상에서 배열센서의 축 방향에 따른 거리를 나타낸다. 800 Hz의 경우 부배열 센서 간의 거리가 0.9375 m로 가장 짧으므로, 이와 같은 단위거리에 대하여 공간상관성을 계산하였다. 여기서 거리가 0 m인 경우는 동일한 센서로 Eq. (12)에서  과
과  이 동일한 경우이다.
이 동일한 경우이다.
Fig. 8에서 거리가 0 m인 경우 공간상관성이 1이 되는 것은 동일한 센서에 대한 공간상관성이 완벽한 상관관계가 되기 때문이다. 그리고 거리가 멀어짐에 따라 공간상관성이 0을 중심으로 변동하는 것을 확인할 수 있다. 이와 같이 변동하는 것은 거리가 변함에 따라 그에 따른 위상 차이로 인해 발생하는 것으로 생각된다. Fig. 7과 같이 이벤트에 따라 소음의 방향성 형태가 변화하고, 그에 따라 공간상관성 역시 달라지는 것을 확인할 수 있다. Fig. 8의 공간상관성을 Eq. (13)과 같이 계산하면, Fig. 9와 같이 이벤트에 따른 배열이득을 계산할 수 있다.
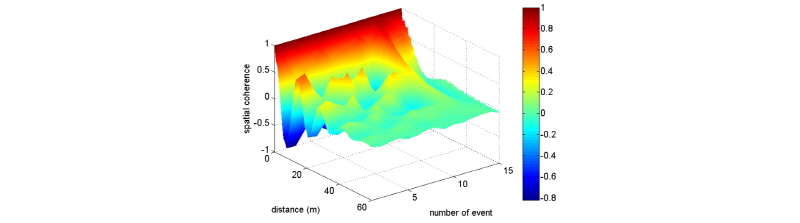
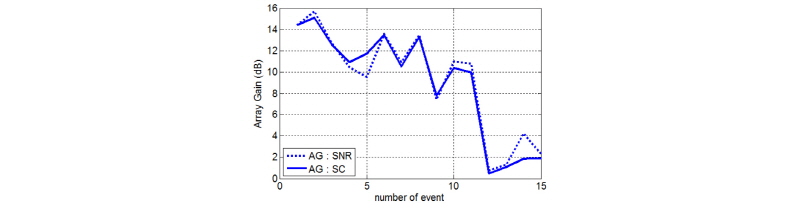
Fig. 9에서 점선은 SNR에 의한 배열이득이고, 실선은 공간상관성에 의한 배열이득이다. 이벤트가 달라짐에 따라 SNR 및 공간상관성에 의한 배열이득이 약 2 dB 이내의 오차를 가지고, 배열이득의 변화하는 경향이 유사함을 확인할 수 있다. 이벤트 마다 배열이득이 변화하는 이유는 Fig. 7과 같이 이벤트에 따른 방향성 소음의 형태가 조금씩 달라지기 때문이다. SNR 및 공간상관성에 의한 배열이득의 오차가 발생하는 이유는 배열센서의 길이가 60 m로 수평으로 배치되어 있기 때문에 도파관 불변성의 영향으로 SNR에 의한 배열이득이 달라지는 것으로 추측된다. 그리고 12번째 이벤트에서 실험선이 기동하고, 이에 따라 음원과 동일한 방위에서 강한 소음이 발생한다. 그러므로 배열센서의 SNR이 저하되어 배열이득이 현저히 낮아지는 것을 확인할 수 있다.
VII. 결 론
본 논문에서는 소음의 형태에 의한 배열이득을 계산하기 위하여 공간상관성에 대한 연구를 수행하였다. 이를 위해 배열센서에서 공간상관성에 의한 배열이득을 계산하는 수식을 정리하였다. 그리고 해양 실험에서 수평 선 배열센서를 이용하여 605 Hz의 CW를 수신하였다. 이와 함께 측정된 소음의 방향성 세기를 이용하여 공간상관성을 도출하고, 이를 이용하여 배열이득을 도출하였다. SNR에 의한 배열이득과 공간상관성에 의한 배열이득을 비교하였고, 이벤트에 따라 약 2 dB 이내의 오차를 가지며 전체적인 경향이 유사함을 확인하였다. 이와 같은 연구를 통해 해양에서 소음의 방향성 세기를 측정한다면, 공간상관성을 이용하여 배열센서를 설치 및 매설하기 이전에 배열이득 추정이 가능할 것으로 생각된다. 그리고 공간상관성을 이용한다면 특정한 소음의 환경에서 배열이득을 최적화할 수 있는 배열센서를 설계할 수 있을 것으로 예상된다. 향후 방향성 소음 외에 배열이득에 영향을 미치는 해양환경 요소인 도파관 불변성, 조류, 내부파 등에 대한 연구가 필요하다. 이를 통해 배열이득 계산의 오차를 최소화할 수 있어야 할 것이다.
