

I. 서 론
II. 선형 곡면 배열 센서와 비선형 곡면 배열 센서의 차이
III. 비선형 곡면 배열 센서의 빔 지향 방위별 부 배열 센서 선택 방법
3.1 센서 위치 벡터를 기준으로한 부 배열의 센서 선택 방법
3.2 센서 빔의 지향 벡터를 기준으로한 부 배열 센서의 선택 방법
3.3 센서 수를 고려한 부 배열의 센서 선택 방법
IV. 센서 선택 방법에 따른 비교 분석
V. 결 론
I. 서 론
함정 건조 기술의 발전에 따라 수중방사소음은 급격히 감소하고 있으며, 해상 무역 발달에 따른 해상교통량 증가로 인해 수중배경소음이 증가하여 소나의 탐지 거리가 제한되고 있다. 이러한 제한을 극복하기 위해 대구경 배열 센서의 필요성이 높아지고 있다. 비선형 곡면 배열 센서는 함 선형에 맞춰 센서를 배열함으로써 배열 센서의 대구경화가 쉬우므로 선형 곡면 배열 센서에 비해 높은 지향 지수를 얻을 수 있다. 이러한 장점 때문에 비선형 곡면 배열 센서의 연구가 활발히 이루어지고 있다.[1,2,3]
빔 형성을 위하여 곡면 배열 센서 중에서 빔 지향 방위에 따라 유효한 센서를 선택하여 부 배열을 구한다. 여기서 비선형 곡면 배열 센서와 선형 곡면배열 센서의 차이가 발생한다. 비선형 곡면 배열 센서는 센서 위치 벡터와 센서 빔의 지향 벡터가 다르다. 하지만 선형 곡면 배열 센서는 앞의 두 가지 벡터가 같다. 따라서 선형 곡면 배열에서는 부 배열을 선택할 때 센서 개수만 고려하면 되나, 비선형 곡면 배열 센서는 두가지 벡터에 대한 선택을 고려해야 된다. 본 논문에서는 센서 위치 벡터를 이용한 부 배열을 선택하는 방법과 센서 빔의 지향 벡터를 이용한 부 배열을 선택하는 방법의 비선형 곡면 배열 센서의 성능에 미치는 영향을 시뮬레이션을 통해 분석하였다.
본 논문의 II장에서 선형 곡면 배열 센서와 비선 형 곡면 배열 센서의 차이에 대하여 서술 하였고, III장에서는 비선형 곡면 배열 센서의 빔 지향 방위별 부 배열을 구성하는 센서를 선택하는 방법에 대하여 서술하였다. VI장에서 시뮬레이션을 통해 부 배열을 구성하는 센서를 선택하는 방법에 따른 곡면 배열 센서의 성능 비교를 하였고 V장에서 결론을 맺었다.
II. 선형 곡면 배열 센서와 비선형 곡면 배열 센서의 차이
먼저 각 단일 센서가 지향성을 가지고 있다고 가정한다면, 비선형 곡면 배열 센서와 선형 곡면 배열 센서의 가장 큰 차이점은 음향 중심과 단일 센서의 위치에 따라 형성 되는 위치 벡터와 단일 센서 빔의 지향성에의해 형성되는 센서 빔의 지향 벡터에 있다. 비선형 곡면 배열은 임의 형상을 가지고 있으므로 단일 센서의 위치 벡터와 단일 센서 빔의 지향 벡터가 다르다. 하지만 선형 곡면 배열 센서의 경우, 단일 센서의 위치 벡터와 단일 센서 빔의 지향 벡터가 같다. 이러한 차이로 인해 곡면 배열 센서의 빔 지향 방위에 따라 선택된 부 배열의 센서는 기준으로 사용된 벡터에 따라 달라진다.
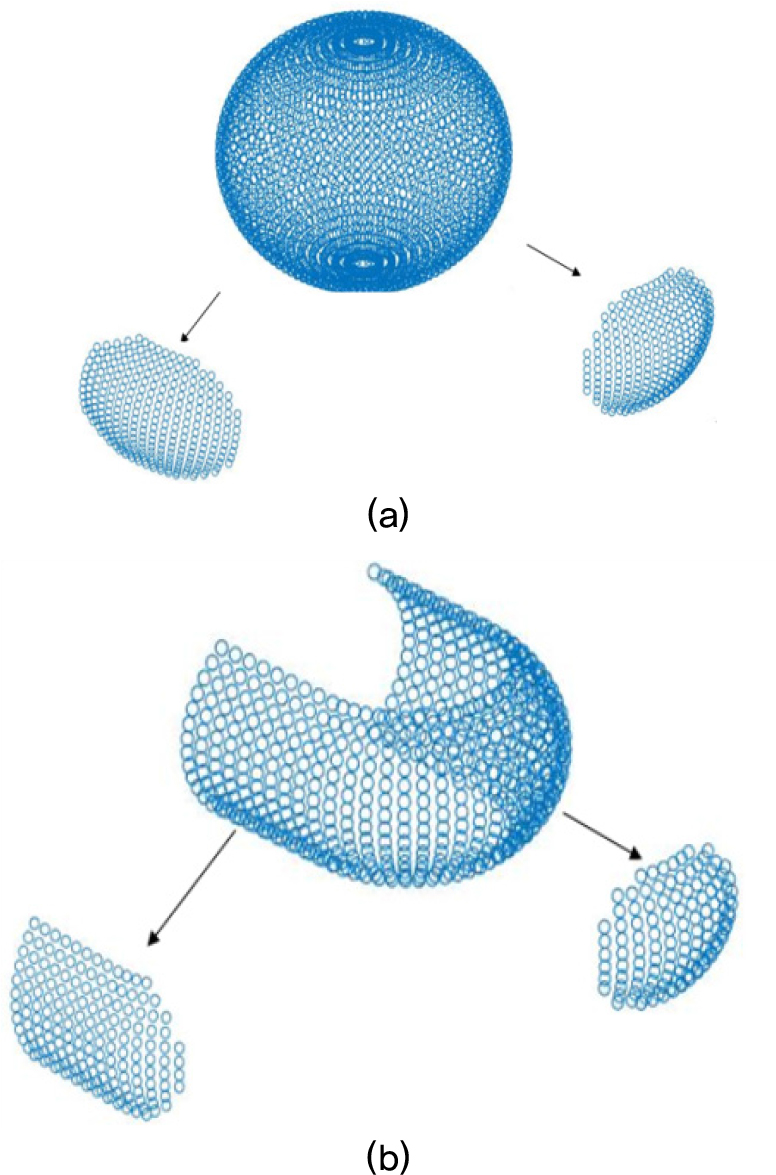
비선형 곡면 배열과 선형 곡면 배열의 다른 차이는 다음과 같다. 비선형 곡면 배열은 빔 지향 방위에 따른 부 배열의 형상이 다르다는 것이다. 예를 들어 Fig. 1(a)와 같이 선형 곡면 배열 센서인 구형 배열 센서는 어떠한 방위에서 보든지 같은 형상을 가진다. 그러므로 빔 지향 방위에 따라 부 배열의 형상이 같다. 이에 반해 비선형 곡면 배열 센서는 Fig. 1(b)와 같이 보는 방위에 따라 다른 형상을 가진다. 따라서 빔 지향 방위에 따라 부 배열의 형상이 다르다. 그러므로 빔 지향 방위에 따라 부 배열과 센서 수, 유효 개구면의 크기 등이 달라진다.[4,5] 결과적으로 빔 지향 방위에 따라 지향지수, 빔폭 등의 성능 차이를 가지게 된다. 더 나아가 빔 지향 방위에 따른 성능 차이로 인해 다음과 같은 문제가 발생할 수 있다. 표적이 이동 중이라고 가정 할 때, 성능이 낮은 지향 방위를 지나가게 되면 표적이 사라졌다 다시 생성는 현상이 발생할 수 있다. 따라서 이러한 현상으로 탐지 안정성이 떨어지게 된다.
다른 차이점으로 비선형 곡면 배열 센서의 부 배열은 그 자체의 형상 또한 비선형적이라는 것이다. 원통형과 구형 배열 센서의 부 배열 형상은 선형적인 특성을 가지므로 빔 패턴, 지향 지수 등의 성능을 구하는 여러 방법이 알려져 있다. 하지만 곡면 배열 센서는 부 배열 자체가 비선형적인 형상을 가지므로 해석적인 방법으로 구하기 어렵다.
마지막으로 비선형 곡면 배열 센서는 선형 곡면 배열 센서에 비해 효율적으로 센서를 배치 할 수 있다. 함 형상에 맞춰 센서를 배치함으로써 같은 공간에 대구경의 배열 센서를 사용할 수 있고, 선형 곡면 배열 센서에 비해 많은 센서를 배치할 수 있으므로 지향지수를 높일 수 있다. 또한 배열 센서의 설치 장소에 따라 결정되는 음영구역과 탐지 범위에 맞춰 센서를 배치 할 수 있는 장점이 있다. 선형 배열 센서와 비선형 배열 센서의 차이를 Table 1에 정리하였다.
III. 비선형 곡면 배열 센서의 빔 지향 방위별 부 배열 센서 선택 방법
3.1 센서 위치 벡터를 기준으로한 부 배열의 센서 선택 방법
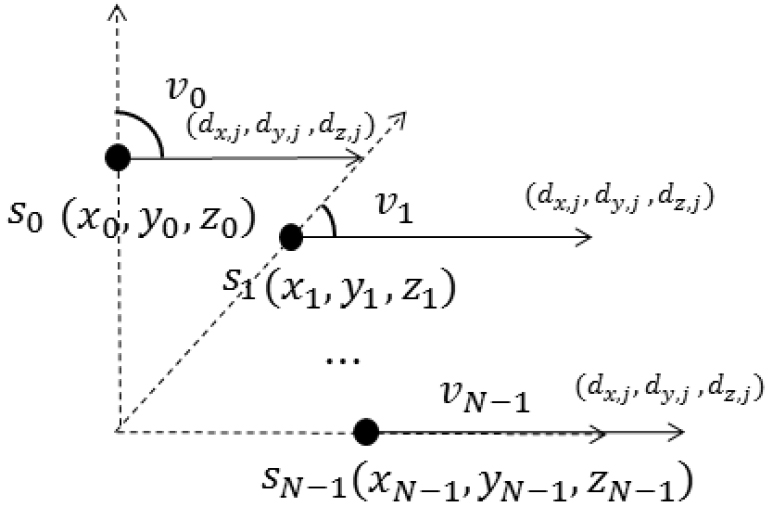
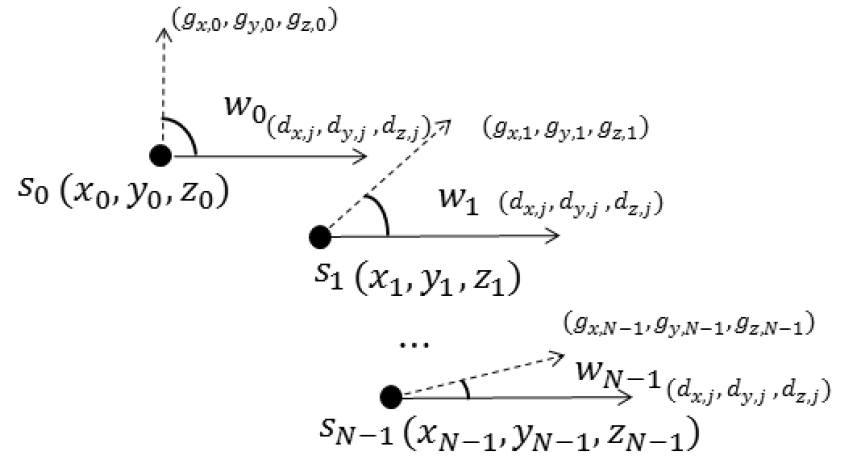
3차원 공간에서 센서들이 Fig. 2와 같이 배치되어 있다고 가정하였다. 음향 중심을 기준으로한 센서의 위치 좌표 는 로 이루어 졌을 때, 빔 지향 방위의 지향 벡터 는 이다. 이때, 센서 위치 벡터와 빔 지향 방위의 지향 벡터가 이루는 사이 각 는 다음과 같이 표현된다.
여기서 곡면 배열 Eq. (4)를 이용하여 보다 작은 센서를 선택한다. 는 사용한 백터와 빔 지향 벡터사이 각의 기준이다. 선형 곡면 배열인 구형과 원통형 배열 센서인 경우, 는 60°를 사용한다.[4]
3.2 센서 빔의 지향 벡터를 기준으로한 부 배열 센서의 선택 방법
센서 빔의 지향 벡터가 기준인 센서 선택 방법은 부 배열에 입력되는 표적 신호의 크기를 고려한 방법이다. 곡면 배열 센서의 각 센서들이 지향성을 가지고 있다고 가정한다면 Fig. 3와 같이 각 센서는 다른 지향 벡터를 갖는다. 또한, 곡면 배열 센서의 빔 지향 방위에 표적 신호가 존재한다고 가정한다면 센서에 입사되는 표적 신호가 최대화되기 위해서 신호 입사 방위와 센서 빔의 지향 방위차이가 최소화 되어야 한다. 따라서 곡면 배열 센서의 빔 지향 방위와 센서 빔의 지향방위가 최소화 되어야한다. 여기서 원통형 또는 구형 곡면 배열 센서는 센서 위치 벡터와 센서 빔의 지향 벡터가 같기 때문에 센서에 입사 지향에 따른 신호의 감쇄를 고려할 필요가 없다. 하지만 비선형 곡면 배열 센서의 경우, 센서 위치 벡터와 센서 빔의 지향 벡터가 같지 않기 때문에 센서 선택 기준에 따라서 센서에 입사되는 신호의 감쇄가 다르다. 따라서 센서에 입력되는 신호의 크기를 최대화되기 위해서는 센서 빔의 지향 벡터를 기준으로 부 배열 센서를 선택하는 방법을 고려하여야 한다.

각 부 배열의 센서에 입력되는 신호의 입사각을 고려하기 위해 빔 지향 방위의 지향 벡터와 센서 빔의 지향 벡터 사이 각을 이용하였다. Fig. 4와 같이 각 센서 빔의 지향 벡터 는 로 구성되어 있을 때, 센서 빔의 지향 벡터와 빔 지향 방위의 지향 벡터가 이루는 각 는 다음과 나타 낼 수 있다.
여기서 은 내적이다. 이때, Eq. (4)와 같이 보다 작은 센서를 선택하다. 부 배열에 선택된 센서는 다음과 같이 구할 수 있다.
3.3 센서 수를 고려한 부 배열의 센서 선택 방법
원통형 또는 구형인 선형 배열 센서는 빔 지향 방위별 부 배열의 센서 수는 같다. 하지만 비선형 곡면 배열 센서의 경우, 빔 지향방위에 따라 선택된 부 배열의 센서 수가 달라진다. 부 배열의 센서 수가 달라지면 지향지수가 영향을 받는다. 지향지수는 유효 개구면의 크기에 영향을 받지만 사용된 센서 수도 크게 영향을 받게 된다. 따라서 센서 수가 급격히 차이가 나는 부분에서 지향 지수의 차이에 의해 허위 표적을 발생하는 요인으로 작용할 수 있다. 따라서 3.1와 3.2의 방법에서 동일한 개의 센서를 가지는 부 배열을 고려하였다. 와 를 내림차순으로 정렬하여 개의 센서를 선택한다.
IV. 센서 선택 방법에 따른 비교 분석
센서 선택 방법에 따른 성능 비교를 위하여 지향 지수와 빔 폭을 사용하였다.[5,6,7,8] 선형 배열 원통형 배열은 지향지수를 구하는 방법이 알려져 있다. 하지만 비선형 곡면 배열의 경우, 비선형적인 형상으로 해석적으로 지향 지수를 구하는 것에 제한이 된다. 하지만 배열의 지향 지수는 빔 패턴 을 이용하여 다음과 같이 구할 수 있다.[4,8]여기서 는 방위각, 는 고각이다.
여기서 빔 패턴 는 다음과 같이 구할 수 있다. 배열 센서 위치 벡터를 라고 할 때, 배열의 응답 는 Eq. (13)와 같이 정리할 수 있다. 이때, 센서를 빔 조향 벡터를 이며, 는 가중 벡터이다.
여기서 는 단일 센서의 빔 패턴이다. 단일 센서의 빔 패턴은 Eq. (15)을 사용하였다.[4] 를 이용하여 센서 빔의 지향지수를 조정 할 수 있다.
빔폭은 Eq. (12)에서 빔 패턴을 사용하여 –3 dB에 해당하는 절단면을 이용하여 구할 수 있다. 이때 이 절단면은 타원의 형태를 가지고 있어 3 dB 빔 폭은 여러 방향을 정의 될 수 있다. 하지만 성능을 비교를 단순화하기 위하여 수평/수직 빔 폭을 사용하였다.
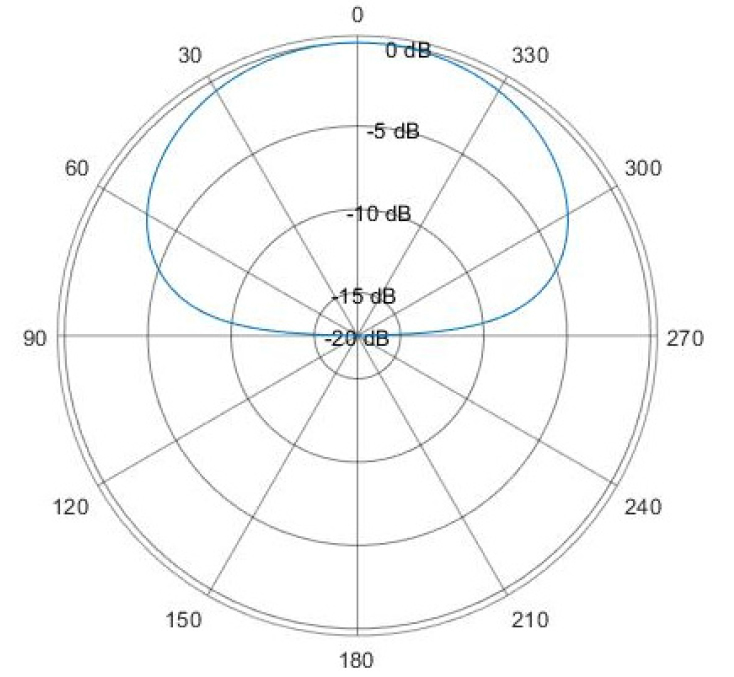
센서 선택 방법의 성능을 비교하기 위하여 2가지 곡면 배열 형상에 대하여 지향지수, 3 dB 빔 폭을 분석하였다.[6,7,8] 배열 센서의 공간 제한을 가로 4 m, 세로 4 m, 높이 3 m로 가정하였고 센서 간격은 설계 주파수의 반 파장을 사용하였다. 또한 수평, 수직으로 ±135°, ±45°의 음역구역이 각각 존재한다고 가정하였다. 이러한 제한된 공간과 음역 구역에 적합한 대표적인 배열 형상인 타원형과 U자 형태의 배열 형상을 선정하였다. Table 2 같이 타원형과 U자형 형상을 제시된 공간 맞도록 센서를 배치 시켰다. 또한 Fig. 5(d)에 나타내었다. 타원형과 U자형 형상을 사용한 이유는 센서가 설치 되는 공간에 가장 타원형 배열형상은 가로와 세로 장축 3 m, 단축 2 m을 사용하였다. U자형 배열 형상은 지름 4 m 반구와 반구의 양 끝점 센서를 설계 주파수의 반 파장으로 2 m까지 평행 이동 하였다. 단일 센서 빔패턴으로 Eq. (6)을 사용하였으며 Fig. 6에 나타내었다. 여기서 는 2.5를 사용하였다.
Table 2.
Array information.
| Array1 | Array2 | |
| Array type | Ellipse | U |
| The number of sensor | 599 | 588 |
| The horizontal shadow zone | ±135° | |
| The vertical shadow zone | ±45° | |
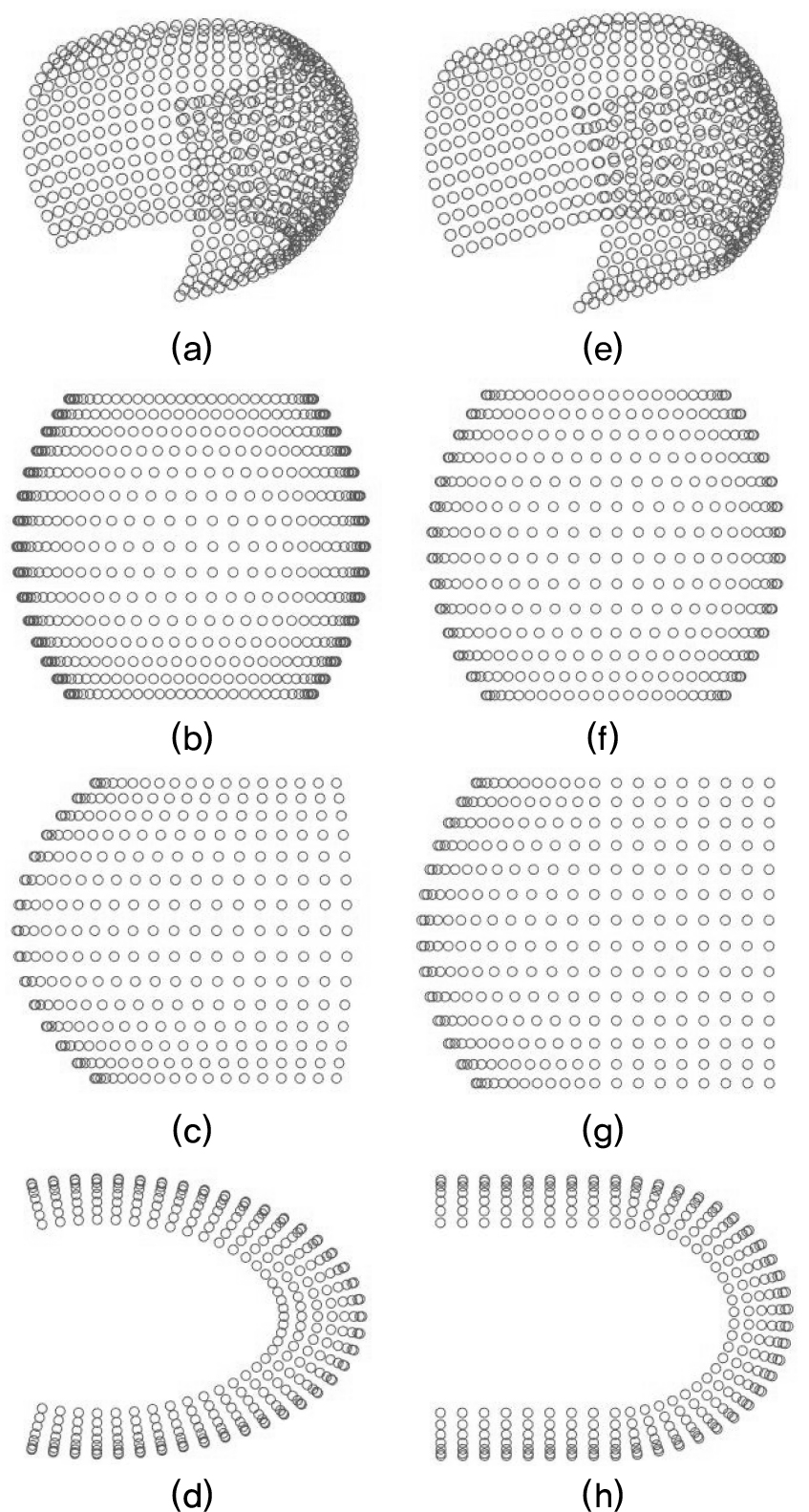
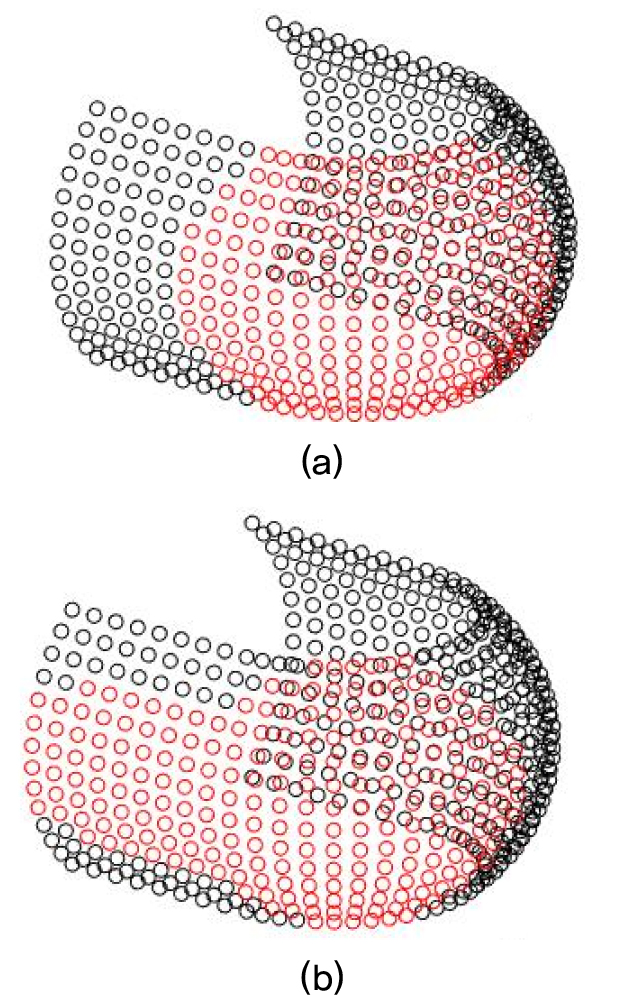
각 센서 선택 방법에 따라 수평 0°와 수직 0°을 지향하는 빔 패턴은 Fig. 7에 나타내었다. 또한 음영구역을 제외한 지향방위에서 곡면 배열의 성능은 Table 3에 나타내었다. array1에서는 지향지수 분산과 수직 빔 폭 평균 성능을 제외한 나머지 성능은 센서 빔의 지향 벡터를 기준으로한 방법의 성능이 뛰어났다. 그리고 array2에서는 센서 빔의 지향 벡터를 기준으로한 방법의 모든 성능이 높았다. 이러한 결과는 Fig. 8와 같이 센서 선택 기준에 따라 부 배열의 센서 수와 센서 형상의 차이가 발생한다. Fig. 8는 빔이 수평 –45°, 수직 0°을 지향 할 때 센서 위치 벡터를 기준인 방법과 센서 빔의 지향 벡터를 기준으로 선택된 부 배열을 나타내었다. Fig. 8에서 센서 빔의 지향 벡터를 기준으로 선택된 부 배열은 센서 위치 벡터를 기준으로 선택된 부 배열보다 수평으로 더 많은 센서들이 선택되었다. 이때 곡면 배열 센서에서 옆면에 배치된 센서들의 센서 빔 지향 방위가 수평으로 같거나 비슷하기 때문에 수평으로 유효 개구면의 크기가 증가 한다. 이러한 이유로 인해 센서 빔의 지향 벡터를 기준으로한 방법이 대부분의 성능이 높아진다. 하지만 이는 곡면 배열 센서의 형상에 따라서 달라질 수 있다.
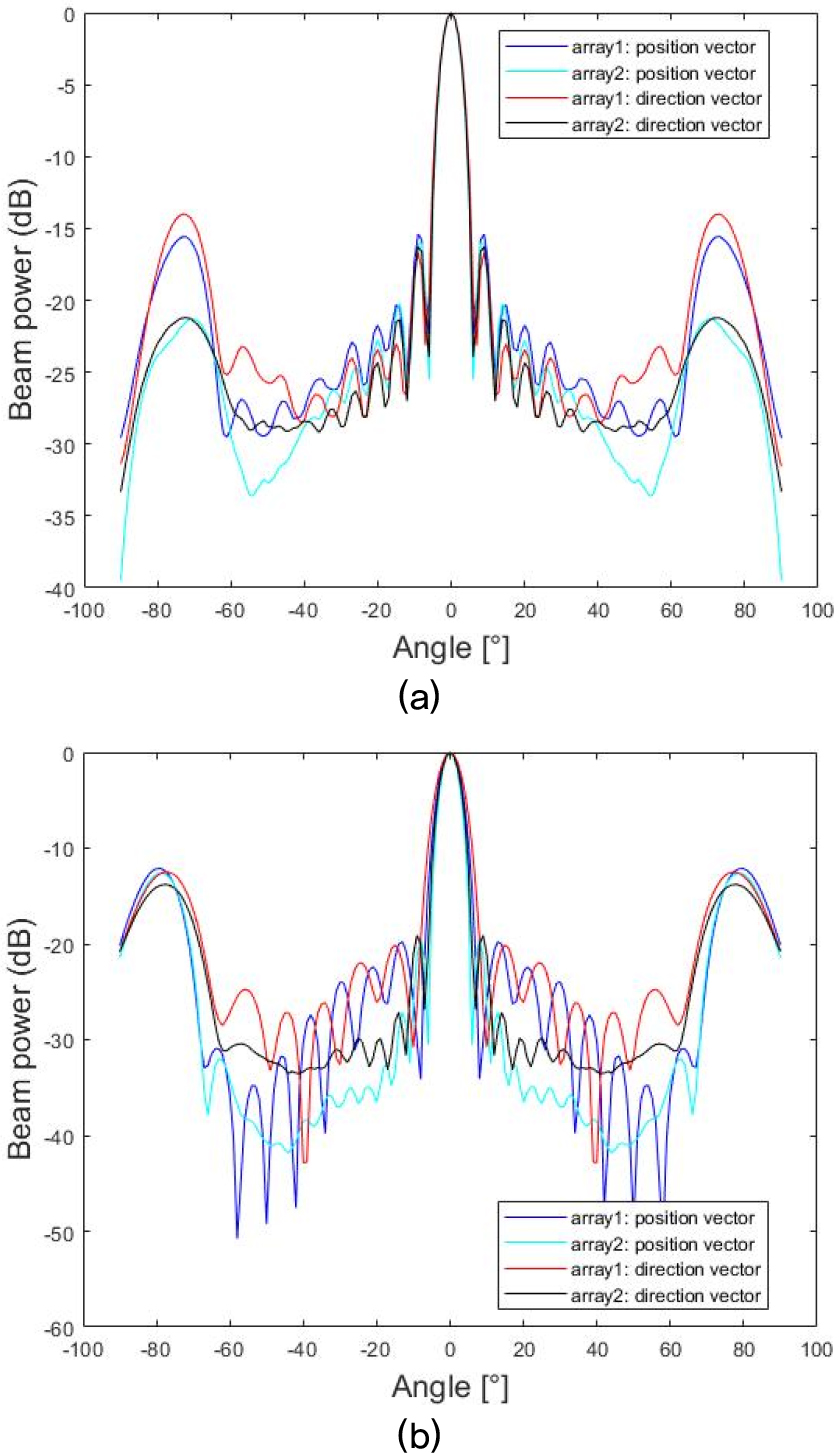
Table 3.
Performance according to array.
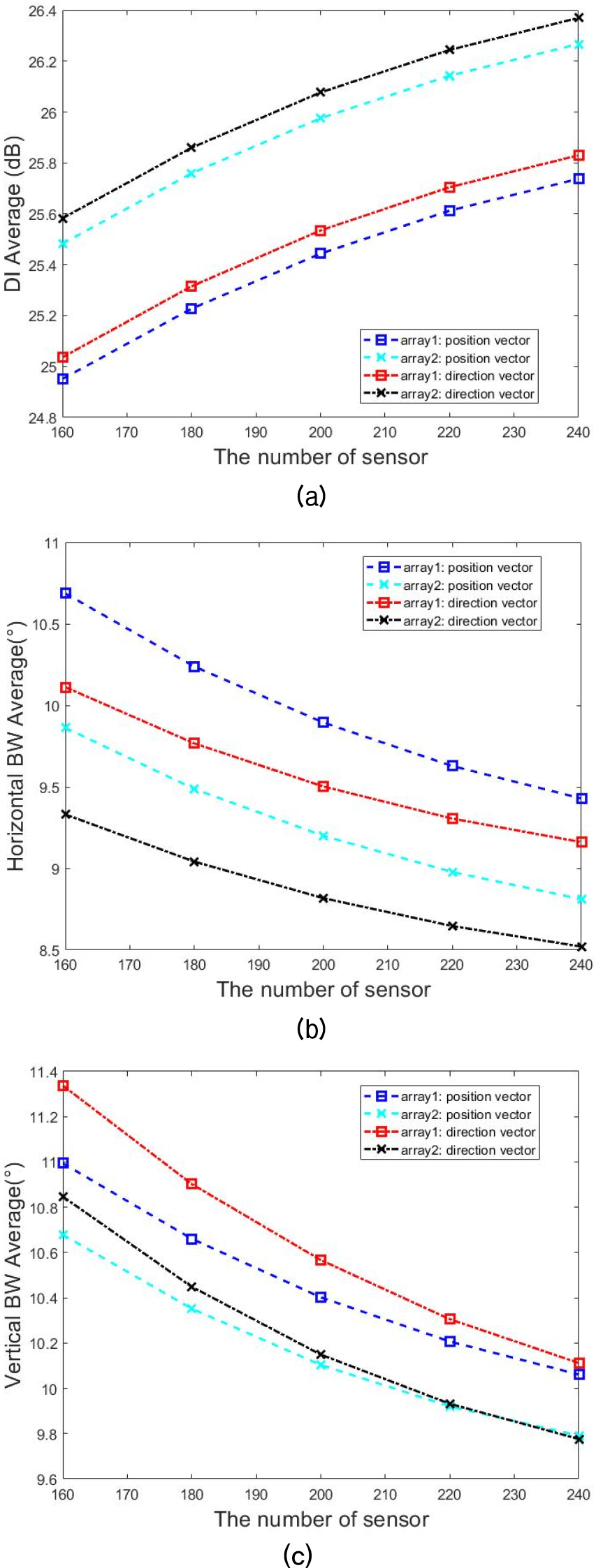
곡면 배열 센서의 형상별 센서 선택 방법 및 센서 수에 따른 각 지표의 평균 및 분산 성능을 각각 Fig. 9과 Fig. 10에 나타내었다. Fig. 9(a)와 (b)에서 array1과 array2에서 센서 빔의 지향 벡터를 기준으로한 방법이 지향지수와 수평 3 dB 빔 폭 평균 성능이 높았다. 하지만 Fig. 9(c)에서 수직 3 dB 빔 폭 평균 성능은 센서 위치 벡터를 기준으로한 방법이 높게 나타났다. Fig. 8와 같이 센서 빔의 지향 벡터 기준이 특정 방위에서 더 많은 수평 센서를 선택하기 때문이다. 하지만 센서를 160개를 사용할 때 보다 240개를 사용할 때 두 방법의 수직 3dB 빔 폭 성능차이는 줄어든다. 이는 센서 선택 수가 많아질수록 센서 빔의 지향 벡터 기준은 수직으로 센서를 더 많이 선택하기 때문에 두 방법의 성능 차이는 줄어든다. Fig. 10(a)와 (b)에서 센서 위치 벡터를 기준으로한 방법이 지향지수 및 수평 3 dB 빔 폭 분산이 작다. 센서 위치 벡터를 기준으로한 방법은 지향 방위가 변화에 따른 선택된 센서의 변화가 적어 부 배열의 형상의 변화가 작다. 이와 같은 현상은 다음과 같이 설명 된다. array1와 array2은 빔 지향 방위가 수평 0°일 때, 구와 비슷한 형상을 가져 두 센서 선택 방법에 의해 선택되는 센서의 차이가 없다. 하지만 지향 방위가 측면으로 이동하면 Fig. 8와 같이 차이를 보이게 된다. 따라서 센서 지향 벡터를 기준으로한 방법은 특정 각도 이상에서 선택되는 센서들이 크게 바꿔 부 배열의 형상의 변화가 크다. 따라서 지향지수 및 수평 3 dB 빔 폭 분산이 커지게 된다. 하지만 수직 3 dB 빔 폭은 지향 벡터 기준이 적게 나타난 이유는 수평 3 dB 빔 폭과 반대로 측면을 지향 하고 수직 조향이 변화 할 때, 센서 위치 벡터를 기준이 부 배열 형상의 수직 유효 개구면 크기가 줄어든다. 하지만 지향 벡터 기준은 수직 유효 개구면 크기가 비교적 일정하게 유지된다. 또한 선택된 센서의 수가 많아질수록 수직센서를 많이 선택되므로 분산이 줄어든다. Fig. 10에서 190개와 200개의 센서를 사용할 때 각각 Table 3의 array1, array2와 비슷한 평균 지향 지수 성능을 가진다. 이때 수평, 수직 3 dB 빔 폭 평균 또한 비슷하다. 이는 선택된 센서의 수가 센서 수를 제한하지 않았을 경우만큼 충분하기 때문이다.
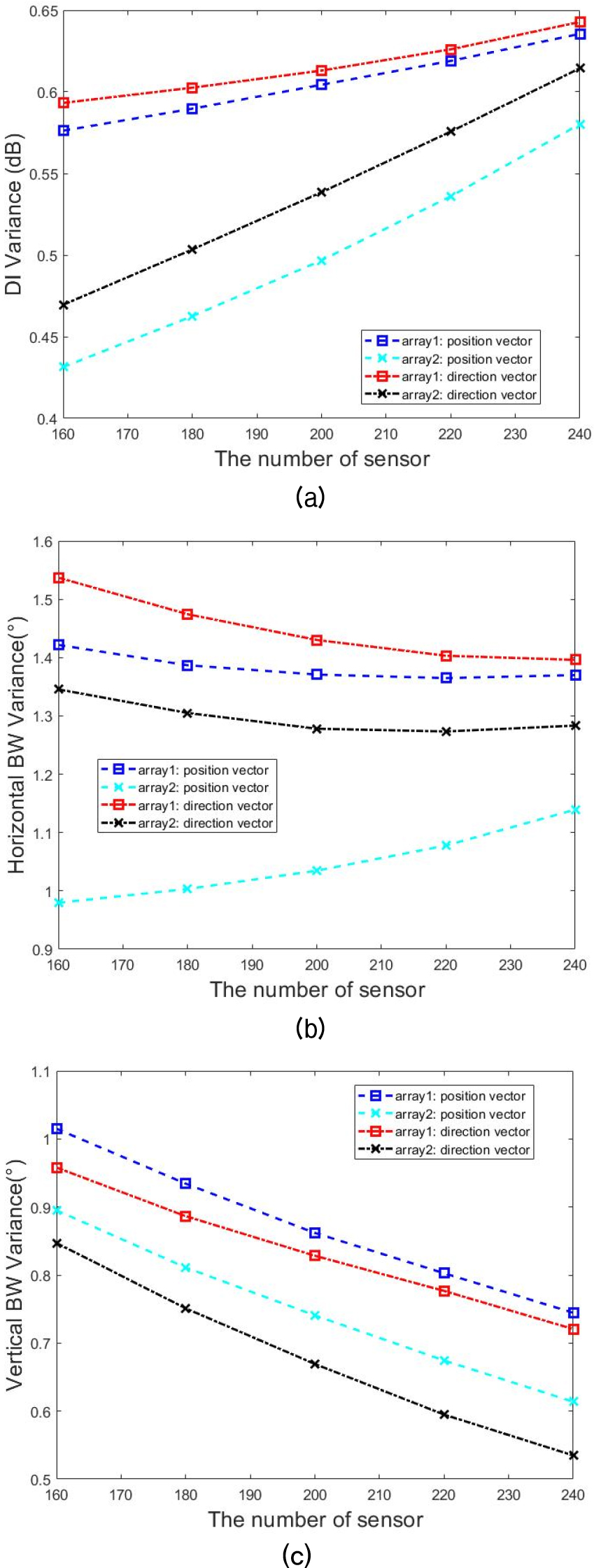
센서 빔의 지향 벡터가 기준인 부 배열 센서 선택 방법은 대부분의 성능이 높았다. 하지만 센서 위치 벡터를 기준으로한 부 배열 센서 선택 방법은 수직 3 dB 빔 폭에 대하여 비교적 뛰어난 성능을 보였다. 그러나 이러한 성능 차이는 곡면 배열 센서의 형상이나 선택된 센서의 수에 따라 줄어들었다. 따라서 곡면 배열 센서의 형상, 부 배열의 센서 수 또는 중요한 성능 기준에 따라 곡면 배열 센서의 부 배열 센서 선택 방법을 결정해야한다.
V. 결 론
곡면 배열 센서는 배열의 형상에 따라 비선형적인 특성을 가진다. 이러한 비선형적인 특성으로 지향 방위에 따른 부 배열의 센서를 선택하는 방법이 달라져야 한다. 본 논문에서는 센서의 위치 벡터와 지향 벡터를 기준으로 부 배열의 센서를 선택하였다. 또한 두 방법은 빔 지향 방위에 따라 부 배열의 센서 수가 달라지는데 이에 따라 출력되는 신호의 에너지가 달라진다. 그러므로 각 방법에 센서 수를 제한하는 방법을 고려하였다. 두 가지 곡면 배열 센서의 형상에 따라 총 네 가지 방법에 대해 지향지수, 수평 수직 3 dB 빔 폭을 비교 분석하였다. 본 논문에서 사용한 형상에 대하여 센서 수를 고정하지 않았을 경우, 센서 빔의 지향 벡터를 기준으로한 방법이 DI 평균 성능은 각 형상에서 0.16 dB, 0.22 dB 높았다. 또한 수평 빔 폭 평균은 센서 빔의 지향 벡터를 기준으로 한 방법이 두 형상 모두 0.59° 적어 높은 성능을 보였다. 수평 빔폭 분산은 각각 0.15°, 0.12° 적어 수평 지향 방위별 성능차이가 적었다. 하지만 수직 빔 폭 평균은 센서 빔의 지향 벡터를 기준으로 한 방법이 array1에서 0.08° 더 크게 나타났으며, array2에서는 0.02° 작게 나타났다. 수직 빔 폭 분산은 센서 빔의 지향 벡터를 기준으로 한 방법이 각각 0.11°, 0.06° 작게 나타나 수직 지향 방위에 따른 성능 차이가 적었다. 따라서 대부분 센서 빔의 지향 벡터를 기준으로한 방법이 곡면 배열 센서의 형상에 따라 차이는 있지만 대부분의 성능이 뛰어났다. 또한 수직 3 dB 빔 폭 성능은 차이가 없거나 센서 위치 벡터를 기준으로한 방법의 수직 3 dB 빔 폭 성능이 뛰어났다. 센서 수를 제한하지 않는 방법 보다 제한하는 방법이 평균 지향지수 성능은 비슷하지만, 성능의 분산이 줄어들었다. 따라서 센서 빔의 지향 벡터를 기준으로한 방법이 성능은 뛰어났지만 센서의 형상이나 제한된 센서의 수에 따라 성능의 편차가 줄어들었다. 센서의 형상과 수에 따라서 결과의 차이는 발생 하더라도 지향지수와 3 dB 빔 폭 성능의 경향은 같다. 그러므로 우선시 하는 빔 성능에 따라 센서 선택 방법을 결정하는 것이 필요하다. 향후 지향방위 따라 빔 형성의 성능이 달라지는데 이를 보상하는 방법에 대한 연구를 수행할 것이다.
